Устройство, способ, контейнер и упаковка для упаковывания продуктов тетраэдрической формы - RU2656895C2
Код документа: RU2656895C2
Чертежи





Описание
Изобретение относится к устройству для упаковывания, в частности, к устройству, которое может быть использовано для упаковывания продуктов тетраэдрической формы. Изобретение также относится к способу, осуществляемому с помощью такого устройства, а также к контейнеру и/или упаковке, заполняемым с помощью такого устройства и/или способа.
Двумя аспектами фундаментальной важности в упаковочной промышленности являются оптимизация пространства, занимаемого упаковываемыми продуктами, а именно, минимизация пустых пространств внутри контейнера, в который помещаются данные продукты, и максимизация плотности продуктов внутри контейнера, а также максимизация скорости процесса упаковки.
Существует множество возможных способов оптимизации пространства, например, способы, с помощью которых пять или шесть продуктов тетраэдрической формы располагаются своими противоположными гранями рядом друг с другом, образуя, таким образом, в плане пятиугольник или шестиугольник: такие способы применяются в основном для упаковки элементов по существу тетраэдрической формы.
В процессе получения желаемого расположения размещение тетраэдрических продуктов внутри контейнера производится вручную. Недостаток этого известного способа заключается в том, что его невозможно осуществлять так быстро, как этого хотелось бы, вследствие "узкого места", обусловленного ручным заполнением контейнеров.
Альтернативный способ включает в себя использование известных автоматов, в которых с целью сокращения времени заполнения контейнеров применяется роботизированный манипулятор, захватывающий один тетраэдрический продукт за один раз и помещающий его внутри контейнера псевдослучайным способом. Это известное устройство содержит также две параллельные конвейерные ленты, загружаемые с противоположных сторон и перемещающие, соответственно, тетраэдрические продукты и контейнеры, в которые помещаются данные продукты. В качестве системы управления используется камера для определения положения каждого из тетраэдрических продуктов, лежащих навалом на соответствующей конвейерной ленте, с целью обеспечения соответствующего перемещения руки робота. Недостаток этой машины заключается в высокой сложности системы управления рукой робота, а также относительно низкая скорость заполнения контейнера.
В патентном документе US 3396507 А раскрыто устройство, в котором продукты тетраэдрической формы накапливаются веерообразно на краю конвейерной ленты для захвата перемещающим средством и помещения в контейнер радиальным образом, что приводит к соответствующим ограничениям по оптимизации пространства, заполняемого тетраэдрическими продуктами внутри контейнера.
В патентном документе US 3618758 А раскрыт контейнер, содержащий тетраэдрические продукты, расположенные в ряд один за другим таким образом, что их нижние поверхности находятся в одной и той же плоскости, а сами тетраэдрические продукты ориентированы противоположным образом относительно своего предыдущего тетраэдрического продукта.
Таким образом, цель настоящего изобретения заключается в создании устройства и способа, в которых были бы устранены указанные выше недостатки. Указанная цель достигается с помощью устройства, способа, контейнера и упаковки, основные отличительные признаки которых определяются приложенной формулой изобретения.
Идея, лежащая в основе данного изобретения, заключается в упорядоченном расположении тетраэдрических продуктов уже на конвейерной ленте таким образом, чтобы перемещающее средство, заполняющее контейнеры, могло одновременно захватывать несколько тетраэдрических продуктов. Благодаря вышеупомянутому упорядоченному расположению может быть значительно повышена скорость заполнения контейнеров, и, следовательно, скорость всего процесса упаковки.
Способ, позволяющий располагать тетраэдрические продукты таким образом, включает в себя определенное количество операций, которые могут выполняться автоматическим устройством согласно настоящему изобретению при нахождении тетраэдрических продуктов на одной или нескольких конвейерных лентах. Данный способ включает в себя первый этап, во время которого тетраэдрические продукты располагаются в ряд один за другим, все с одинаковой ориентацией.
На втором этапе стопорное устройство блокирует тетраэдрические продукты, чтобы передать их для выполнения третьего этапа на не слишком коротком расстоянии друг от друга. На третьем этапе каждый тетраэдрический продукт поворачивается вращающим устройством в горизонтальной плоскости на 90° альтернативно в двух направлениях, а именно, каждый продукт поворачивается в направлении, противоположном направлению вращения предыдущего тетраэдрического продукта, а затем выполняется поворот следующего продукта.
На четвертом этапе тетраэдрические продукты блокируются первым накопителем, если это необходимо, с целью передачи на пятый этап, когда будет завершен описываемый ниже шестой этап.
На пятом этапе накопленные тетраэдрические продукты, выпускаемые первым накопителем, блокируются вторым накопителем, чтобы собрать требуемое количество продуктов в конфигурации согласно настоящему изобретению. В данной конфигурации тетраэдрические продукты располагаются в ряд таким образом, что соединительные кромки двух смежных тетраэдрических продуктов по существу перпендикулярны друг другу, а нижние треугольные грани продуктов расположены по существу в одной и той же плоскости, образуя, таким образом, переменную "треугольную волну".
На шестом этапе все накопленные таким образом тетраэдрические продукты одновременно захватываются перемещающим средством и переносятся данным средством с конвейерной ленты внутрь заполняемого контейнера, обеспечивая оптимизацию занимаемого пространства. Перемещающее средство, предпочтительно, представляет собой перемещающее средство с двумя степенями свободы, выполненное, например, в виде шарнирной системы со стержнями, образующими шарнирный пятисторонний элемент. Кроме того, устройство, предпочтительно, включает в себя датчики, представляющие собой, например, кинокамеры и/или фотоэлементы, обеспечивающие возможность сканирования на протяжении каждого из этапов.
Устройство и способ согласно настоящему изобретению позволяют также размещать в том же самом контейнере второй слой тетраэдрических продуктов над первым слоем, в котором соединительные кромки тетраэдрических продуктов второго слоя перпендикулярны соединительным кромкам расположенных непосредственно под ними тетраэдрических продуктов первого слоя.
Дополнительные преимущества и характерные особенности устройства, способа, контейнера и упаковки согласно настоящему изобретению станут очевидными специалистам в данной области техники после ознакомления с приведенным ниже неограничивающим описанием некоторых вариантов осуществления настоящего изобретения со ссылками на прилагаемые чертежи, на которых:
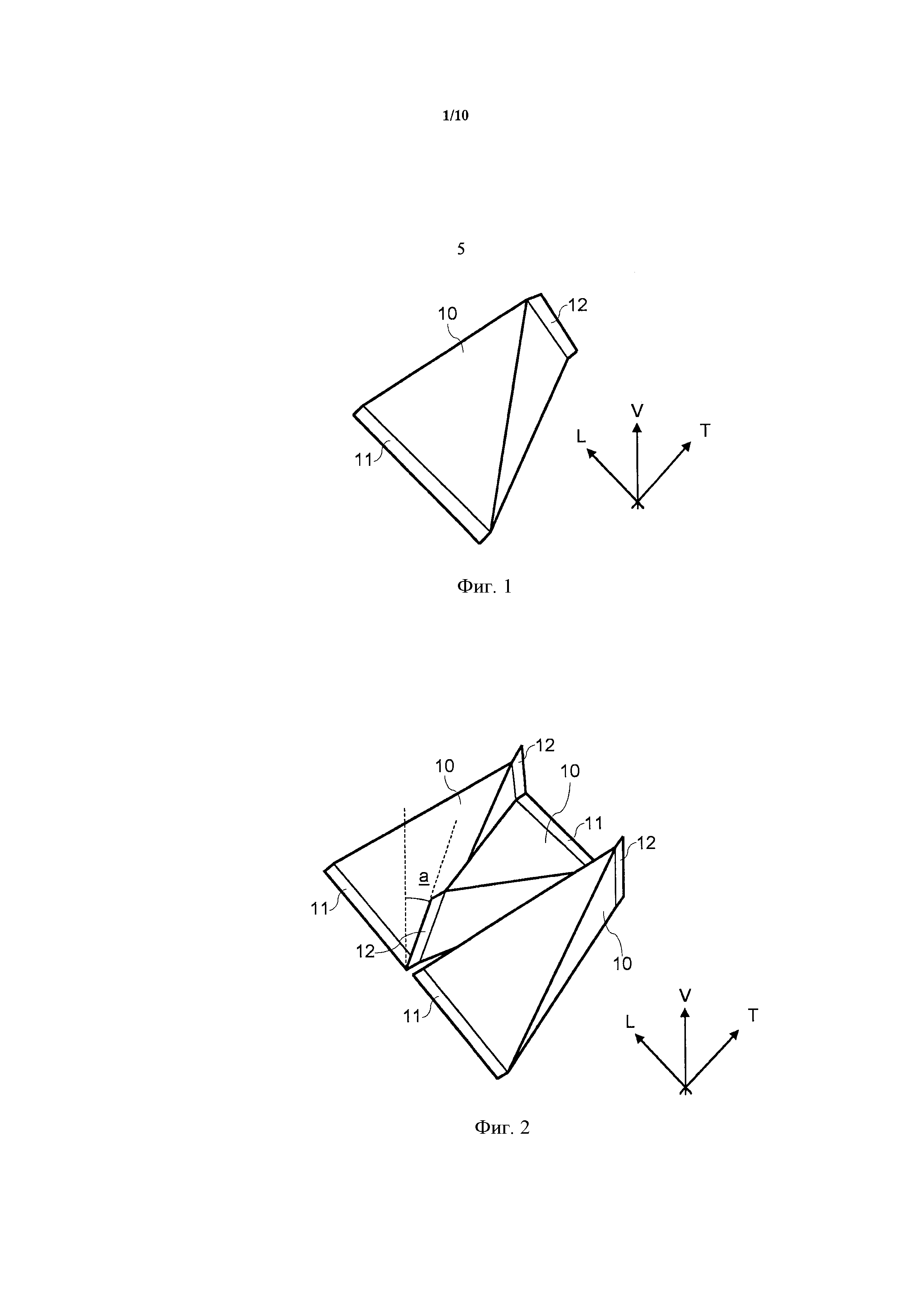
на фиг. 1 показан тетраэдрический продукт, вид в перспективе;
на фиг. 2 - оптимальное расположение тетраэдрических продуктов, вид в перспективе;
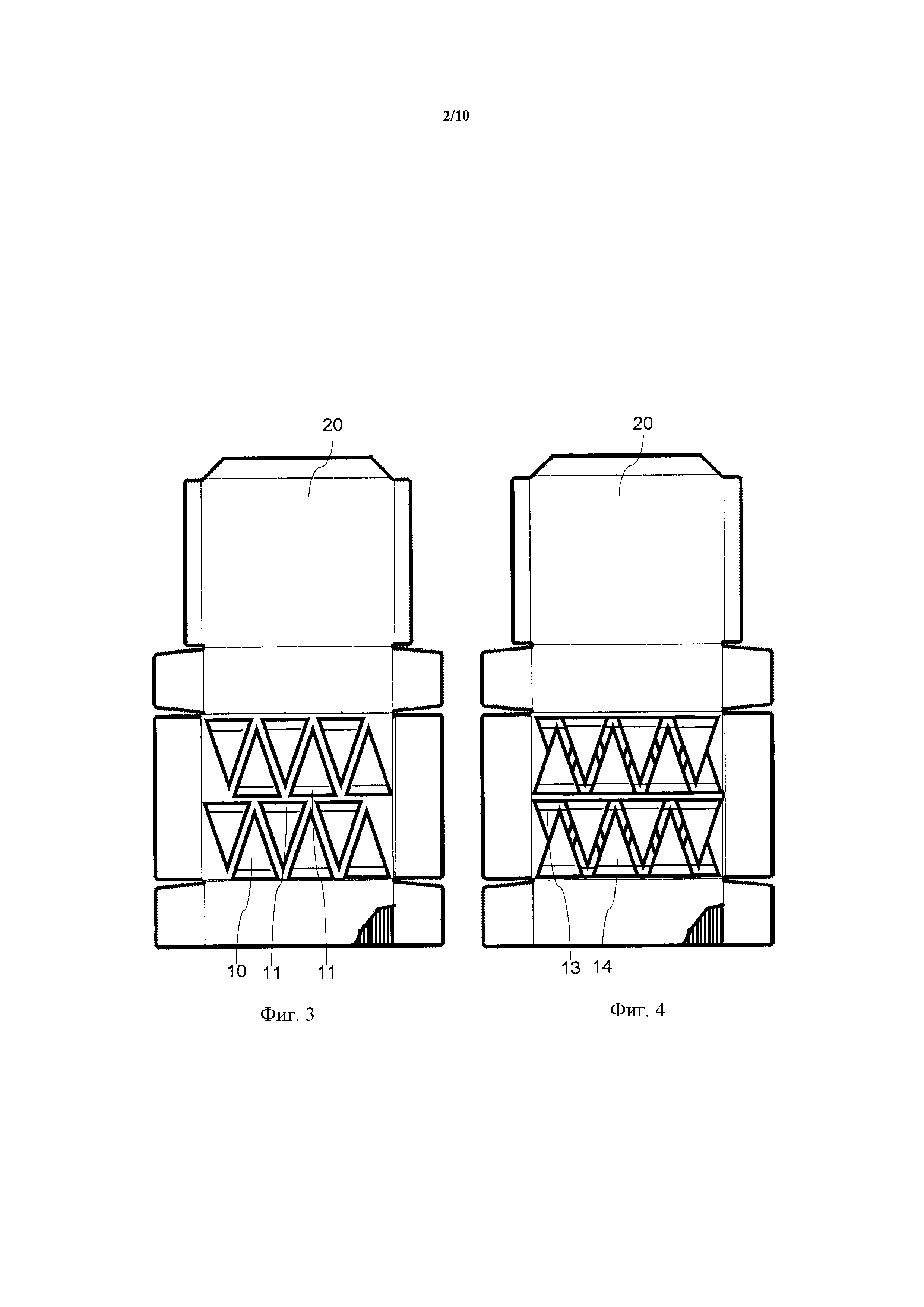
на фиг. 3 - открытый контейнер с двумя расположенными рядом рядами тетраэдрических продуктов, показанных на фиг. 2, вид сверху;
на фиг. 4 - то же, с двумя слоями тетраэдрических продуктов;
на фиг. 5 схематично показан первый вариант выполнения устройства согласно настоящему изобретению, при заполнении контейнера, показанного на фиг. 4, вид сверху;
на фиг. 6 показано устройство на этапе захвата тетраэдрических продуктов, вид сбоку;
на фиг. 7 - то же, вид в разрезе плоскостью VII-VII на фиг. 6;
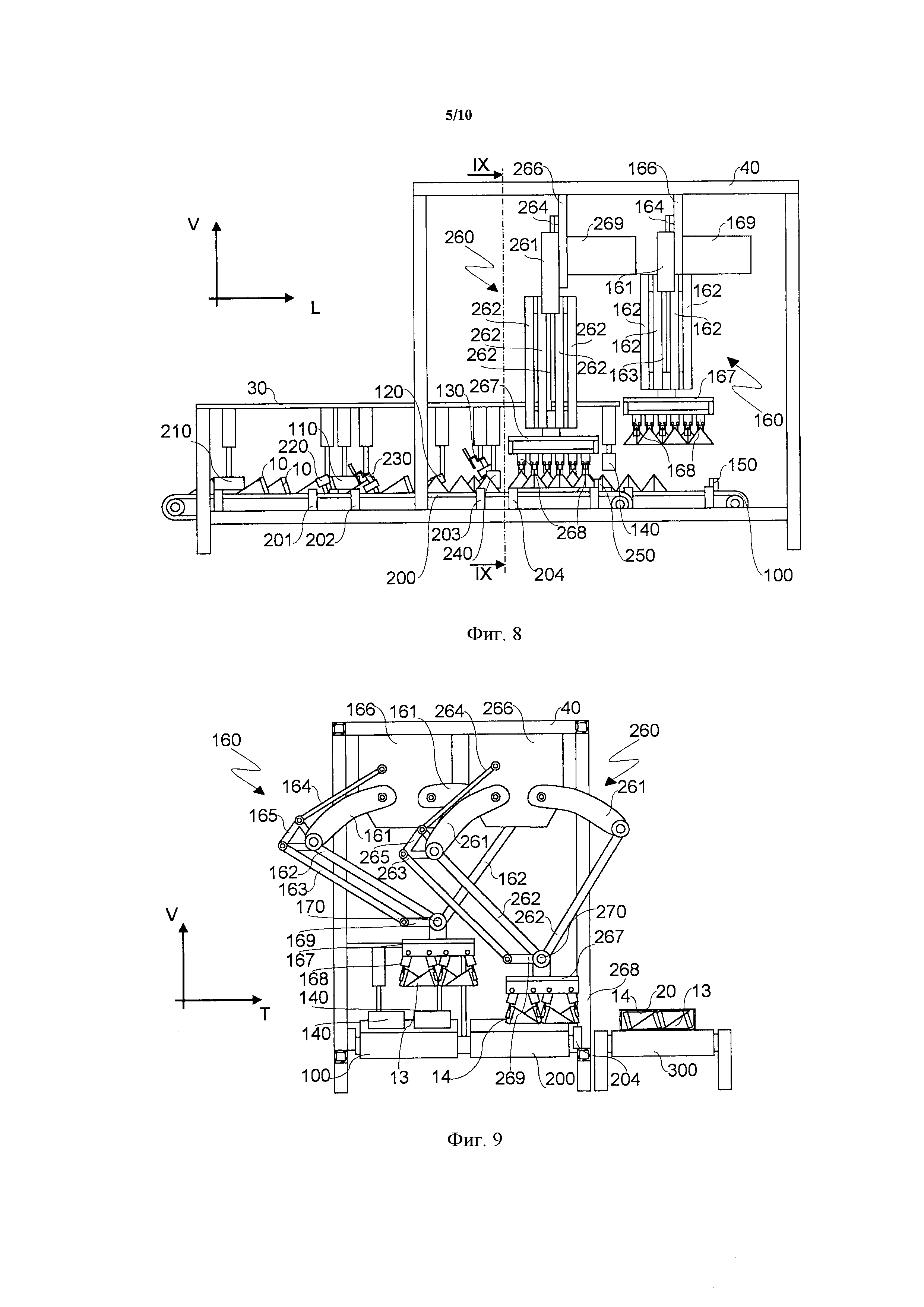
на фиг. 8 - устройство на этапе передачи тетраэдрических продуктов, вид сбоку;
на фиг. 9 - то же, вид в разрезе плоскостью IХ-IХ на фиг. 8;
на фиг. 10 - стопорное устройство заявленного устройства, вид в перспективе;
на фиг. 11 - вращающее устройство заявленного устройства, вид в перспективе;
на фиг. 12 - первый накопитель заявленного устройства, вид в перспективе;
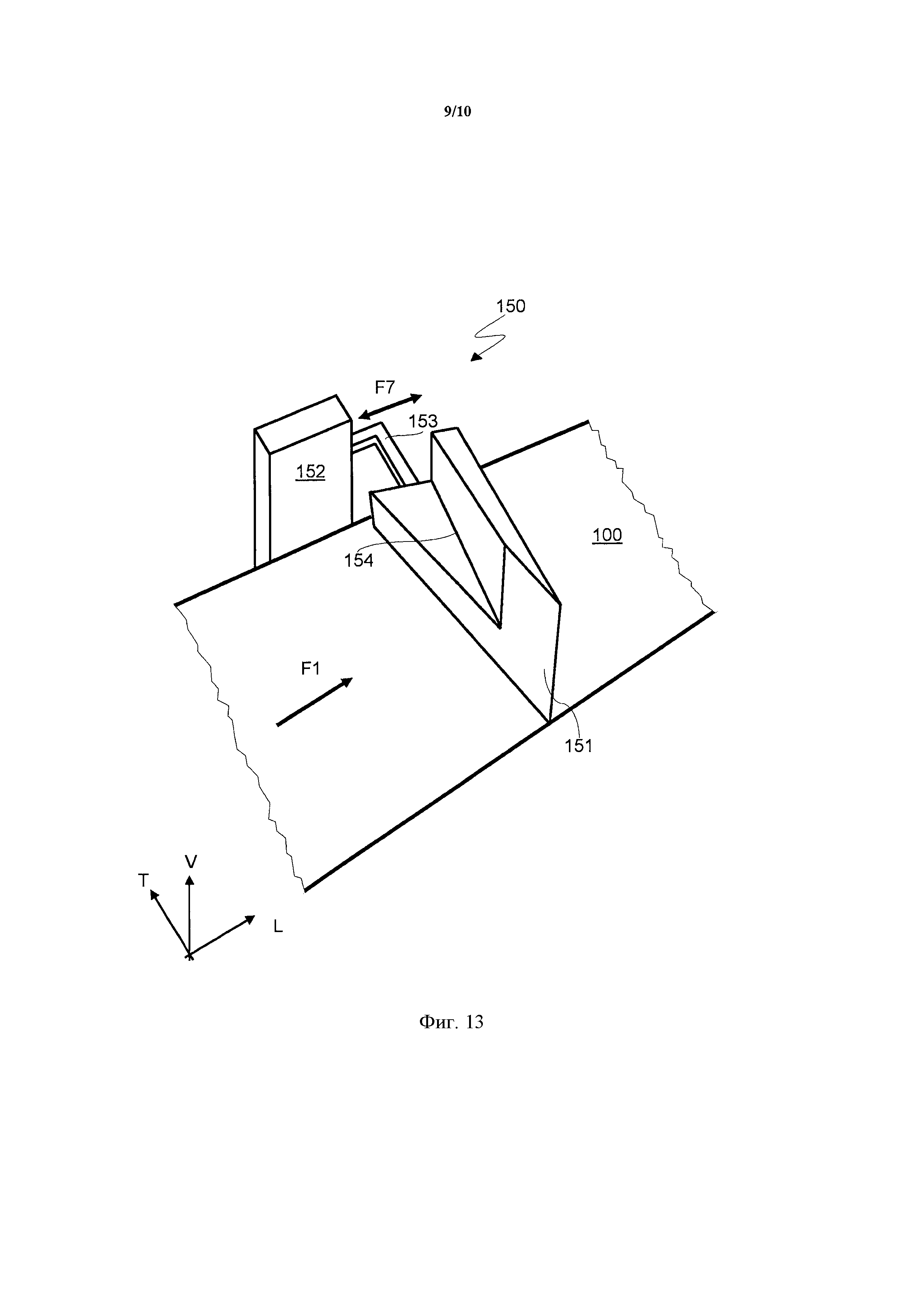
на фиг. 13 - второй накопитель заявленного устройства, вид в перспективе;
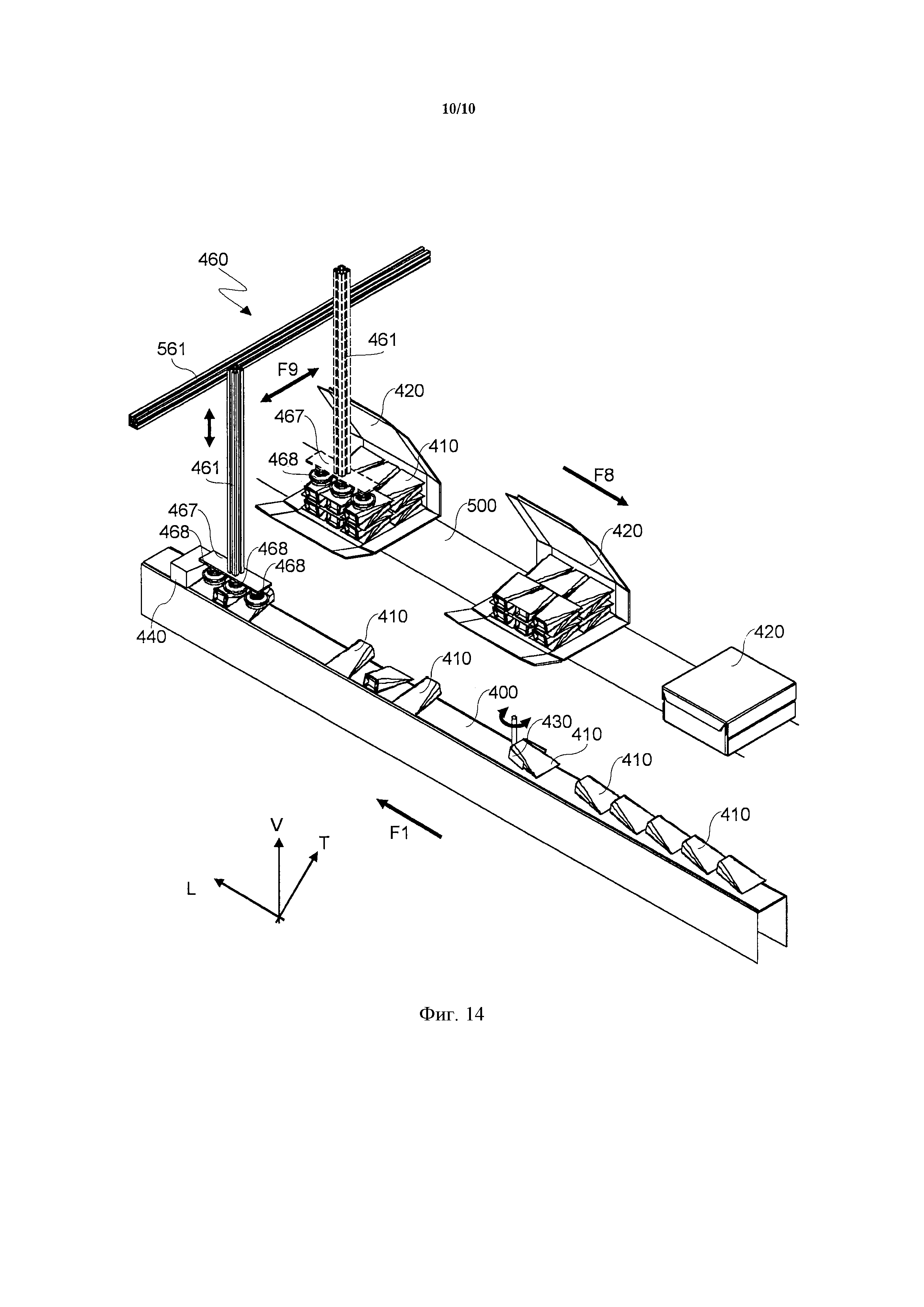
на фиг. 14 схематично показан второй вариант выполнения заявленного устройства, вид в перспективе.
Как показано на фиг. 1, известный тетраэдрический продукт 10 имеет по существу тетраэдрическую форму с четырьмя треугольными гранями, в частности, в форме по существу равнобедренного треугольника, и двумя соединительными кромками 11, 12, образованными в местах соединения двух противоположных кромок и располагающимися в плоскостях по существу перпендикулярных друг другу.
Как видно из фиг. 2, в конфигурации согласно настоящему изобретению тетраэдрические продукты 10 установлены по меньшей мере в один ряд, и соединительные кромки 11, 12 двух соседних тетраэдрических продуктов 10 по существу перпендикулярны друг другу, а нижние треугольные грани образуют переменную треугольную конфигурацию, образующую вдоль продольной оси L по существу горизонтальную плоскость LT, определяемую продольной осью L и поперечной осью Т. В частности, первые соединительные кромки 11 тетраэдрических продуктов 10 расположены по существу параллельно указанной плоскости LT с нижними треугольными гранями, в то время как вторые соединительные кромки 12 образуют с плоскостью LV, перпендикулярной поперечной оси Т, угол, являющийся дополнительным к основному углу равнобедренно-треугольных граней тетраэдрических продуктов 10.
Как показано на фиг. 3, контейнер 20, имеющий по существу призматическую форму, предпочтительно, выполненный в форме параллелепипеда из куска картона соответствующей формы, сложенного требуемым образом (но показанного не сложенным на чертеже), может заполняться путем помещения в него рядом друг с другом двух рядом тетраэдрических продуктов 10, размещаемых так, как это показано на фиг. 2. В альтернативном варианте осуществления изобретения два ряда тетраэдрических продуктов 10 могут располагаться зеркально.
Как видно из фиг. 4, второй слой 14 тетраэдрических продуктов 10 может располагаться на первом слое 13 внутри контейнера 20, показанного на фиг. 3, без необходимости увеличения размера. Для этого необходимо, чтобы два ряда тетраэдрических продуктов второго слоя 14 были расположены противоположным и дополняющим образом относительно двух рядов находящихся непосредственно под ними тетраэдрических продуктов 10 первого слоя. Тогда верхние треугольные поверхности тетраэдрических продуктов 10 второго слоя 14 будут находиться по существу в одной и той же плоскости, по существу параллельной плоскости, в которой лежат нижние треугольные поверхности тетраэдрических продуктов 10 первого слоя 13. Данные плоскости, в свою очередь, по существу параллельны основанию и крышке контейнера 20.
В показанном варианте осуществления изобретения в контейнере 20 размещено в общей сложности двадцать четыре тетраэдрических продукта 10, уложенных в два слоя 13, 14, каждый из которых образован двумя рядами из шести тетраэдрических продуктов 10. Первые соединительные кромки 11 тетраэдрических продуктов 10 ориентированы практически горизонтально, а именно, практически параллельно основанию контейнера 20. В других вариантах осуществления изобретения контейнеры 20 или пакеты, имеющие другие формы и/или размеры, могут быть заполнены аналогично тому, как описано выше, а также с различными количествами продуктов, рядов и/или слоев.
Как показано на фиг. 5, контейнер 20 может заполняться тетраэдрическими продуктами 10 автоматически, с помощью устройства согласно настоящему изобретению, содержащему одну или несколько конвейерных лент, в частности, три конвейерных ленты 100, 200, 300, проходящие в продольном направлении L. В частности, первая конвейерная лента 100 и вторая конвейерная лента 200 перемещаются в одном и том же направлении F1 и транспортируют тетраэдрические продукты 10, которые должны быть помещены в контейнеры 20, которые, в свою очередь, транспортируются третьей конвейерной лентой 300, перемещающейся в направлении F8, противоположном направлению F1 перемещения первых двух конвейерных лент 100, 200.
На первом этапе процесса устанавливающие средства 110, 210, смонтированные в начале первых двух конвейерных лент 100, 200 и содержащие вертикальную лопатку, которая может вращаться относительно практически вертикальной оси, устанавливают тетраэдрические продукты 10 один за другим в два ряда в продольном направлении L. Тетраэдрические продукты 10 ориентируются направляющими (на чертежах не показаны) таким образом, что вторая соединительная кромка 12, наклоненная под углом а к плоскости LV, находится в переднем положении относительно направления транспортировки F1 конвейерных лент 100, 200.
На втором этапе процесса первые датчики 101, 201, размещенные вдоль конвейерных лент 100, 200 за устанавливающими средствами 110, 210, определяют прибытие тетраэдрического продукта 10 и, при необходимости, останавливают его путем активизации стопорных устройств 120, 220 таким образом, чтобы тетраэдрические продукты поступали на третий этап с интервалами, достаточными для осуществления третьего этапа.
На третьем этапе процесса вторые датчики 102, 202, установленные вдоль конвейерных лент 100, 200 за первыми стопорными устройствами 120, 220, определяют прибытие тетраэдрического продукта 10 и активизируют вращающие устройства 130, 230, чтобы повернуть продукт практически на угол 90° в горизонтальной плоскости, а именно, практически параллельно поперечной оси Т. В частности, каждый поступающий тетраэдрический продукт 10 поворачивается в направлении, противоположном направлению поворота предыдущего тетраэдрического продукта 10, и вращение конвейерной ленты 100 меняется на противоположное направлению вращения конвейерной ленты 200 с целью получения на двух конвейерных лентах 100, 200 соответствующей "треугольно-волновой" структуры со сдвигом по фазе.
На четвертом этапе процесса третьи датчики 103, 203, установленные вдоль конвейерных лент 100, 200 за вращающими устройствами 130, 230, определяют прибытие тетраэдрического продукта 10 и останавливают его путем активизации первых накопителей 140, 240, которые, в свою очередь, установлены в перевернутом положении между двумя указанными конвейерными лентами. Затем тетраэдрические продукты 10, поворачиваемые вращающими устройствами 130, 230 и перемещаемые конвейерными лентами 100, 200, собираются за тетраэдрическими продуктами 10, остановленными каждым первым накопителем 140, 240, таким образом, образуя переменную "треугольно-волновую" структуру, состоящую из двух пар рядов, до тех пор, пока продукты не смогут поступить на пятый этап процесса. Первая пара рядов образуется на первой конвейерной ленте 100, и вторая пара рядов образуется на второй конвейерной ленте 200, причем каждый ряд на первой конвейерной ленте 100 сдвинут по фазе относительно соответствующего ряда на второй конвейерной ленте 200.
На пятом этапе процесса вторые накопители 150, 250, установленные так же, как и первые накопители 140, 240, останавливают тетраэдрические продукты 10, поступающие с четвертого этапа, и четвертые датчики 104, 204 подсчитывают количество тетраэдрических продуктов 10, собранных на указанных вторых накопителях 150, 250.
На шестом этапе четвертые датчики 104, 204, после того, как количество подсчитанных тетраэдрических продуктов 10 достигнет заданного значения (в рассматриваемом примере - после того, как будет собрано по шесть тетраэдрических продуктов 10 в каждом ряду), активизируют перемещающие средства 160, 260 (показаны пунктиром на фиг. 5), которые захватывают одновременно все тетраэдрические продукты 10, собранные вторыми накопителями 150, 250 на одной из двух конвейерных лент 100, 200, и помещают их в контейнер 20, подаваемый третьей конвейерной лентой 300.
Для заполнения контейнера 20 двумя слоями тетраэдрических продуктов 10 первая конвейерная лента 100 должна быть установлена со смещением вперед по фазе относительно второй конвейерной ленты 200, а именно, таким образом, чтобы первые накопители 140 были совмещены со вторыми накопителями 250, как показано на фиг. 5. Таким образом, первая группа тетраэдрических продуктов 10, поступающих с первой конвейерной ленты 100, может быть помещена первым перемещающим средством 160 в пустой контейнер 20, чтобы образовать первый слой 13 продуктов, как показано стрелкой F9. После этого контейнер 20 перемещается третьей конвейерной лентой 200 в направлении стрелки F8 в положение, соответствующее концу второй конвейерной ленты 200, чтобы второе перемещающее средство 260 могло переместить вторую группу тетраэдрических продуктов 10 и поместить их в контейнер 20 на первый слой 13 тетраэдрических продуктов 10, как показано стрелкой F10, чтобы образовать второй слой 14.
Как показано на фиг. 6 и 7, устройство согласно настоящему изобретению включает в себя первую опорную конструкцию 30, расположенную над первыми двумя конвейерными лентами 100 и 200 и образующую автоматизированные рабочие места, на которых осуществляются первые четыре этапа процесса. Устанавливающие средства 110 и 210, стопорные устройства 120 и 220, вращающие устройства 130 и 230, а также первые накопители 140 и 240 установлены на первой опорной конструкции 30 последовательно в продольном направлении L и, соответственно, на двух конвейерных лентах 100 и 200, а вторые накопители 150 и 250 установлены на опорах за конвейерными лентами, как показано на фиг. 13. Поскольку устройства, работающие на первой конвейерной ленте 10, аналогичны устройствам, работающим на второй конвейерной ленте 200, ниже будут подробно рассмотрены только устройства 120, 130, 140 и 150 первой конвейерной ленты 100.
Перемещающие средства 160, 260 установлены на второй опорной конструкции 40, образующей на первой конвейерной ленте 100 и на второй конвейерной ленте 200, соответственно, автоматизированные рабочие места, на которых осуществляется пятый этап процесса. Первое перемещающее средство 160 аналогично второму перемещающему средству 260, и поэтому аналогичные компоненты обозначаются одинаковыми ссылочными позициями, и ниже будет подробно рассмотрено только первое перемещающее средство 160.
Первое перемещающее средство 160 содержит прикрепленную ко второй опорной конструкции 40 вертикальную раму 166, на которой шарнирно закреплены два рычага 161, вращающиеся в плоскости TV, определяемой поперечной осью Т и вертикальной осью V, приводимые двумя электромоторами 169, установленными на указанной вертикальной раме 166. Каждый рычаг 161 прикреплен к валу электромотора 169. Две пары соединительных тяг 162 шарнирно закреплены на дальних концах рычагов 161, соответственно, спереди и сзади рычагов 161, и дальние концы каждой пары соединительных тяг 162 поворачиваются в общем шарнирном соединении 170, под которым механически закреплена перемещающая головка 167. В такой конфигурации вертикальная рама 166, рычаги 161 и соединительные тяги 162 образуют шарнирный пятисторонний элемент, который позволяет устанавливать перемещающую головку 167 в плоскости TV в положения, определяемые углом поворота рычагов 161, точнее, углом поворота валов электромоторов привода 169.
Перемещающая головка 167 содержит несколько первых захватывающих средств 168, установленных попеременно в параллельных рядах и служащих для одновременного захватывания нескольких тетраэдрических продуктов 10, находящихся на первой конвейерной ленте 100, чтобы поместить их в контейнер 20. В рассматриваемом варианте осуществления захватывающие средства 168 представляют собой зажимающие элементы, которые захватывают тетраэдрические продукты 10 за их вторую соединительную кромку 12, лежащую в плоскости TV. В других вариантах осуществления изобретения захватывающие средства могут представлять собой механически эквивалентные средства, такие как чашечные присосы или комбинации чашечных присосов и зажимающих элементов.
Для улучшения стабильности перемещающей головки 167 перемещающее средство 160, предпочтительно, содержит первый шток 164, шарнирно закрепленный между рамой 166 и первым углом пластинки 165, второй угол которой, в свою очередь, шарнирно прикреплен к дальнему концу рычага 161, а также второй шток 163, шарнирно закрепленный между третьим углом пластинки 165 и соединительной тягой 162.
Таким образом, рама 166, первый шток 164, рычаг 161 и пластинка 165 образуют первый шарнирный четырехугольник, в то время как второй шток 163, пластинка 165, соединительные тяги 162 и соединительный элемент 169 образуют второй шарнирный четырехугольник. Данные два шарнирных четьфехугольника позволяют сохранять одно и то же практически горизонтальное положение перемещающей головки 167, так что при перемещении тетраэдрических продуктов эта головка не совершает каких-либо колебаний относительно шарнира 170, соединяющего ее с шарнирным пятисторонним элементом.
Как видно из фиг. 8 и 9, на шестом этапе процесса первое перемещающее средство 160 захватывает первую группу тетраэдрических продуктов 10, находящихся на первой конвейерной ленте 100, и помещает их внутрь контейнера 20 таким образом, чтобы образовать первый слой 13 тетраэдрических элементов. Второе перемещающее средство 260 захватывает вторую группу тетраэдрических продуктов 10, находящихся на второй конвейерной ленте 200, и для образования второго слоя 14 помещает их в контейнер 20, который к этому моменту уже передвинут третьей конвейерной лентой 300. Для более точного размещения второго слоя 14 тетраэдрических продуктов на первом слое 13 вторая перемещающая головка 267 может содержать исполнительные механизмы, поворачивающие захватывающее средство 268 в плоскости TV таким образом, чтобы верхние треугольные грани тетраэдрических продуктов 10 второго слоя 14 находились в практически горизонтальном положении, а именно, располагались в плоскости, практически параллельной плоскости LT.
Как видно из фиг. 10, стопорное устройство 120 может содержать первое гнездо 121 с внутренним углублением двугранной конфигурации, в которое по меньшей мере частично входит тетраэдрический продукт 10, перемещаемый конвейерной лентой 100 в направлении стрелки F1. Стопорное устройство 120 также может включать в себя первый исполнительный механизм 122, перемещающий шток 123, прикрепленный к первому гнезду 121, так что его можно поднимать и опускать в вертикальном направлении V, как показано стрелкой F2. В частности, когда первое гнездо 121 находится в нижнем положении, оно останавливает тетраэдрический продукт 10, а когда оно находится в приподнятом положении - дает возможность тетраэдрическому продукту 10 проходить далее и поступать на следующий этап.
Как видно из фиг. 11, вращающее устройство 130 может содержать второе гнездо 131, по конструкции аналогичное первому гнезду 121, а также второй исполнительный механизм 132, который перемещает шток 133, прикрепленный к второму гнезду 131, так что его можно поднимать и опускать в вертикальном направлении V, как показано стрелкой F3. Кроме того, второе гнездо 131 может поворачиваться в плоскости LT относительно оси штока 133 в направлениях как по часовой стрелке, так и против часовой стрелки, что иллюстрируется стрелкой F4.
Предпочтительно, вращающее устройство 130 содержит предохранительный упор 134, внутри которого может перемещаться поршень 135 в направлении по стрелке F5. Таким образом, если поршень 135 переместится вниз до тех пор, пока не коснется тетраэдрического продукта 10, когда последний находится во втором гнезде 131, и до его поворота, это может предупредить перемещение тетраэдрического продукта 10 под действием центробежной силы вследствие вращения второго гнезда 131 в поперечном направлении Т.
Как видно из фиг. 12, первый накопитель 140 может содержать первый корпус 141, предпочтительно, клиновидной формы, ориентированный таким образом, что его поверхность, обращенная к подходящему тетраэдрическому продукту 10, наклонена под углом, соответствующим углу наклона поверхности тетраэдрического продукта 10, с которой она входит в контакт, относительно поперечной оси Т. Такой первый накопитель 140 может также содержать третий исполнительный механизм 142, перемещающий шток 143, прикрепленный к первому корпусу 141, таким образом, чтобы поднимать и опускать его в вертикальном направлении V, как показано стрелкой F6. Таким образом, первый корпус 141 в нижнем положении останавливает тетраэдрический продукт 10 и другие тетраэдрические продукты 10, находящиеся за ним. В поднятом положении первый корпус 141 позволяет ряду тетраэдрических продуктов 10 проходить на следующий, пятый этап процесса обработки.
Как видно из фиг. 13, второй накопитель 150 может содержать второй корпус 151, предпочтительно, клиновидной формы, ориентированный таким образом, что его поверхность, обращенная к подходящему тетраэдрическому продукту 10, наклонена под углом, соответствующим углу наклона поверхности тетраэдрического продукта 10, с которой она входит в контакт, относительно поперечной оси Т. Кроме того, второй корпус 151 может содержать полость 154, форма которой выполнена таким образом, чтобы избежать помех со стороны захватывающего средства 168.
Второй накопитель 150 может содержать четвертый исполнительный механизм 152, который перемещает шток 153, прикрепленный ко второму корпусу 151, таким образом, чтобы он мог двигаться в продольном направлении L, как показано стрелкой F7. Таким образом, после захвата перемещающей головкой 167 тетраэдрических продуктов 10 опасность отделения тетраэдрического продукта 10 в результате проскальзывания относительно второго корпуса 151 устраняется за счет перемещения смещения последнего в сторону от тетраэдрического продукта 10, с которым он находится в контакте.
В рассматриваемом конкретном варианте осуществления изобретения третья конвейерная лента 300 расположена параллельно двум другим конвейерным лентам 100, 200 таким образом, чтобы установка в целом занимала минимально возможную площадь. В альтернативном варианте осуществления изобретения третья конвейерная лента 300 расположена практически параллельно поперечному направлению Т, т.е. в этом случае перемещающие средства 160 и 260 повернуты на 90° для перемещения тетраэдрических продуктов 10 в плоскости LV.
В качестве датчиков 101, 201, 102, 202, 103, 203, 104, 204 могут использоваться, например, камеры, фотоэлементы и другие аналогичные средства, известные специалистам в данной области.
Третья конвейерная лента 300 может быть предусмотрена совместно с известным устройством (не показано на чертежах), пригодным для создания упаковок для тетраэдрических продуктов, изготовляемых, например, из листов пластика, согнутых и соединенных по краям. Заключенные в упаковку тетраэдрические продукты 10, в свою очередь, могут быть помещены в контейнер 20.
В показанном на фиг. 14 втором варианте осуществления, аналогичном первому варианту, устройство включает в себя конвейерную ленту 400, перемещающуюся в продольном направлении L по стрелке F1, и перемещающее средство 460, которое может захватывать тетраэдрические продукты 410, транспортируемые конвейерной лентой 400, и перемещать их в поперечном направлении Т по стрелке F9. Перемещающая головка 467 данного перемещающего средства 460 содержит несколько захватывающих средств 468, включающих в себя чашечные присосы, служащие для захватывания за счет понижения давления тетраэдрических продуктов 410, находящихся на конвейерной ленте 400. По меньшей мере один накопитель 450, способный собирать тетраэдрические продукты 410 по меньшей мере в один ряд, установлен вдоль конвейерной ленты 400 на перемещающем средстве 460. По меньшей мере одно вращающее устройство 430 установлено вдоль конвейерной ленты 400 перед накопителем 450 для поворачивания на угол приблизительно 90° по меньшей мере одного тетраэдрического продукта 410 в направлении, противоположном направлению, в котором производилось поворачивание предыдущего тетраэдрического продукта 410 на той же самой конвейерной ленте 400. Перемещающая головка 467 может двигаться вдоль вертикальной оси V и поперечной оси Т благодаря перемещающему средству 460, которое может, например, содержать первый рычаг 461, который может скользить вдоль вертикальной оси V и совершать прямолинейное движение вдоль поперечной оси Т относительно второго рычага 561. Данные рычаги 461, 561 приводятся двумя электромоторами (на чертежах не показаны), например, с перемещающей системой на двух перпендикулярных осях, также известного типа. Рядом с первой конвейерной лентой 400 установлена еще одна конвейерная лента 500, приводимая в движение в направлении F8, противоположном направлению F1 перемещения первой конвейерной ленты 400, с целью транспортировки контейнеров 420, заполняемых тетраэдрическими продуктами 410, освобождаемыми перемещающей головкой 467 путем снятия разрежения в чашечных присосах 468. Чашечные присосы 468 обеспечивают возможность захвата тетраэдрических продуктов путем присасывания к их поверхности вместо зажимания их соединительных кромок, как это предусмотрено в первом варианте осуществления. При такой конфигурации перемещающее средство 460 может захватывать и перемещать тетраэдрические продукты, имеющие только одну соединительную кромку или не имеющие соединительных кромок, например, когда определенный участок данных продуктов является срезанным с целью получения поверхности, выполняющей функцию опоры, например, как в случае тетраэдрического продукта 410, изображенного на чертеже.
В рассмотренные выше и проиллюстрированные здесь варианты осуществления могут быть внесены изменения и модификации, известные специалистам в данной области, при условии, что они не выводят изобретение за пределы объема притязаний приведенной ниже формулы. В частности, другие варианты осуществления изобретения могут содержать технические отличительные признаки, соответствующие одному или нескольким пунктам нижеприведенной формулы изобретения, взятым отдельно или в любых возможных комбинациях с другими отличительными признаками, рассмотренными в описании и/или продемонстрированными с помощью чертежей.
Реферат
Устройство содержит по меньшей мере одну конвейерную ленту, перемещающуюся в продольном направлении, по меньшей мере первые перемещающие средства, способные захватывать тетраэдрические продукты, транспортируемые конвейерной лентой, и содержащие по меньшей мере одну перемещающую головку, захватывающую определенное количество продуктов, находящихся на конвейерной ленте, содержащую один или несколько накопителей, способных собирать продукты в один или несколько рядов, установленных вдоль конвейерной ленты. При этом в устройстве по меньшей мере одно вращающее устройство установлено вдоль конвейерной ленты перед накопителями для поворачивания по меньшей мере одного продукта в направлении, практически противоположном направлению поворота предыдущего продукта на конвейерной ленте. Изобретением также является способ, осуществляемый с помощью вышеописанного устройства. Группа изобретений обеспечивает повышение производительности. 2 н. и 12 з.п. ф-лы, 14 ил.
Комментарии