Способ и устройство для введения упаковок в картонную коробку - RU2608715C2
Код документа: RU2608715C2
Чертежи







Описание
Изобретение относится к способу и устройству для введения предметов в емкости, прежде всего для заполнения (больших) картонных коробок упаковками, такими как пленочные и мягкие упаковки.
Манипулирование пакетными упаковками (для картофельных чипсов) и заполнение картонных коробок такого рода пакетами является темой WO 2009/103441. В данном состоянии техники речь идет о том, чтобы позиционировать пленочные пакеты с чувствительным содержимым в различном расположении внутри картонной коробки большого объема, чтобы как можно оптимальнее использовать ее внутреннее пространство, но, с другой стороны, избежать механических повреждений пакетов. Известное устройство оснащено (двумя) роботами, которые попеременно держат наготове расправленные и раскрытые картонные коробки на упаковочной станции для введения пакетов. Посредством роботов картонные коробки являются подаваемыми в разных относительных положениях с оговоркой, что во время заполнения положение картонных коробок изменяется, чтобы обеспечить разные варианты укладки пакетов. Они вводятся в картонную коробку (только) посредством толкателя через направленную под наклоном транспортировочную плоскость. При этом пакеты лежат на поставленной тоже под наклоном ленте, с которой они посредством передвигаемого поперек толкателя сталкиваются и вталкиваются в картонную коробку.
В изобретении речь идет об улучшении, прежде всего, описанной выше технологии таким образом, что является возможным оптимальное заполнение емкостей или же картонных коробок предметами, прежде всего (пленочными) упаковками, с более высокой производительностью.
Для решения данной задачи способ согласно изобретению отличается признаками п. 1 формулы изобретения.
Согласно изобретению при упаковочном процессе предусматриваются комплексные движения, с одной стороны, для (раскрытой) картонной коробки и, с другой стороны, для вводимых упаковок. Сводимые вместе предметы - картонная коробка и упаковки - являются перемещаемыми (линейно) посредством индивидуальных манипуляционных аппаратов или же держателей, преимущественным образом, в трех координатах и дополнительно - при наложенном движении - вращаемыми или же поворачиваемыми вокруг, преимущественным образом, трех осей. В соответствии с этим бережное введение упаковок в картонную коробку и выполнение комплексного варианта укладки вызываются посредством согласованных между собой линейных и/или вращательных движений удерживающих органов картонной коробки, с одной стороны, и вводимых упаковок, с другой стороны. Управление органами осуществляется через заложенные настраиваемые или же вызываемые программы.
Другая особенность состоит в том, что при передаче в картонную коробку упаковки, альтернативно, являются захватываемыми посредством держателя или же удерживающей головки и манипулируемыми с помощью движений подъема и опускания. Альтернативно или дополнительно, упаковки вводятся в картонную коробку посредством толкания. Подъемная головка для манипулирования упаковками выполнена, преимущественным образом, так, что, альтернативно, упаковки являются захватываемыми с помощью всасываемого воздуха или передвигаемыми посредством толкания (посредством той же самой подъемной головки).
Отдельный робот служит для манипулирования картонной коробкой, а именно для приема порожней картонной коробки от транспортера для подачи картонных коробок, для передачи на упаковочную станцию для выполнения соответственно необходимых движений картонной коробки на упаковочной станции и для передачи заполненной картонной коробки для ее отгрузки. Манипулирование картонной коробкой решено особенным образом. Линейно передвигаемый транспортировочный орган транспортирует заполненную картонную коробку посредством толкающего движения на отгрузочный транспортер. Тот же орган захватывает следующую порожнюю картонную коробку и транспортирует ее в позицию для приема посредством робота.
Другие признаки изобретения относятся к органам для раскрытия картонной коробки или же для удержания ее открытой во время заполнения и к органам для захватывания порожних картонных коробок, а также заполненных коробок с помощью робота.
В дальнейшем, подробности способа и примеры выполнения устройства разъясняются подробнее с помощью чертежей. Показано на:
Фиг. 1 - (пленочная) упаковка в качестве примера в изображении в перспективе,
Фиг. 2 - раскрытая картонная коробка с частичным вырезом с расположенными в комплексном порядке упаковками, последние частично разрезаны, в изображении в перспективе,
Фиг. 3 - установка для манипулирования картонными коробками и их заполнения в виде сверху,
Фиг. 4 - установка согласно фиг. 3 при измененном положении органов, тоже в виде сверху,
Фиг. 5 - вид сбоку на устройство в плоскости разреза или же рассмотрения V-V из фиг. 4,
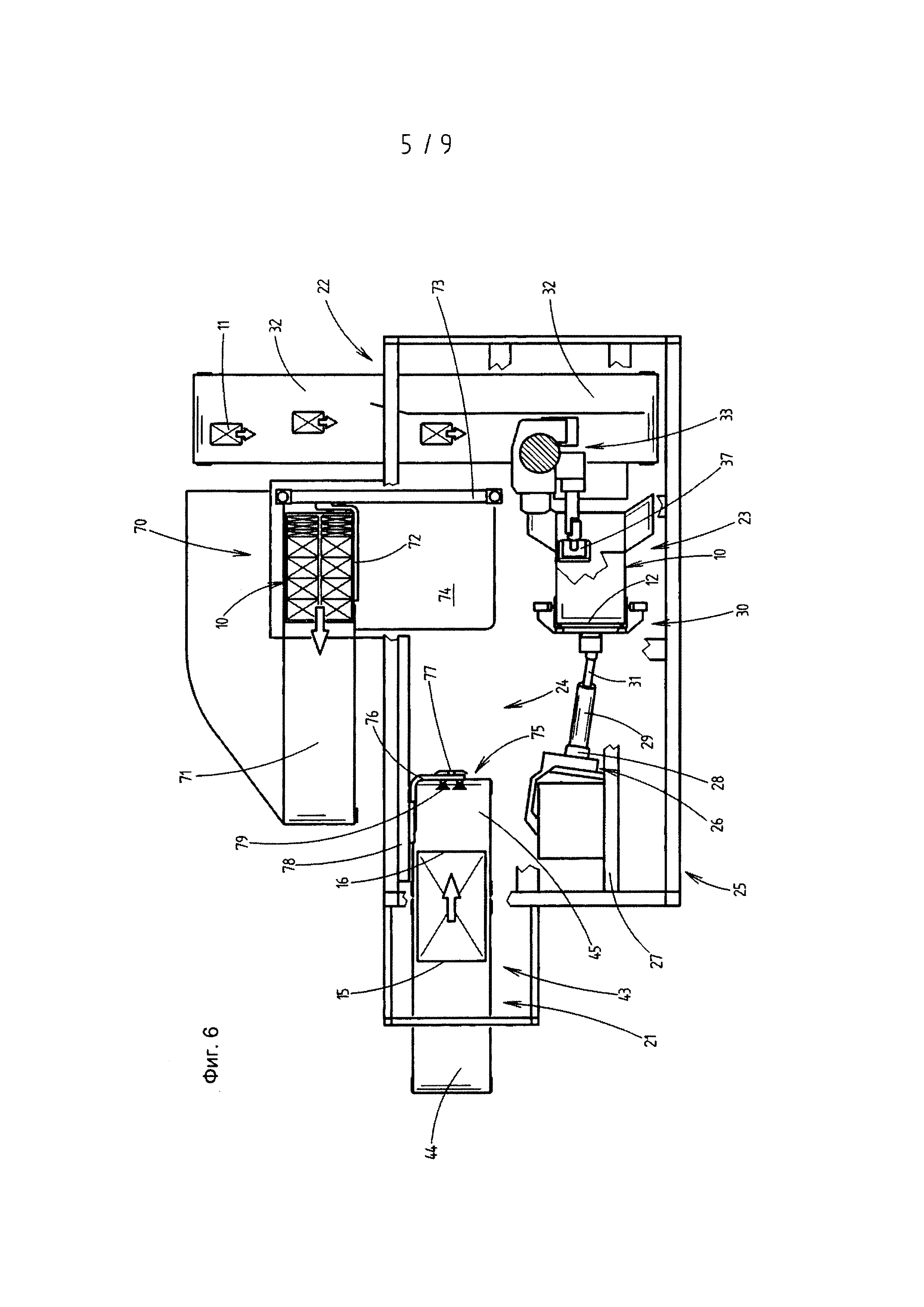
Фиг. 6 - вид сверху на устройство, аналогичное фиг. 3, фиг. 4, во время заполнения картонной коробки на упаковочной станции,
Фиг. 7 - упаковочная станция как деталь изображения в виде сбоку в увеличенном масштабе во время заполнения картонной коробки,
Фиг. 8 - упаковочная станция согласно фиг. 7 при измененном относительном положении картонной коробки и заполняющих органов,
Фиг. 9 - упаковочная станция в виде сверху согласно стрелке IX на фиг. 7,
Фиг. 10 - деталь изображения в области подвода порожних картонных коробок в плоскости разреза или же рассмотрения Х-Х из фиг. 4 в увеличенном масштабе,
Фиг. 11 - деталь изображения структуры согласно фиг. 10 в плоскости разреза или же рассмотрения XI-XI,
Фиг. 12 - схематическое изображение степеней свободы для движения манипуляционных органов картонной коробки, с одной стороны, и упаковок, с другой стороны, в перспективе,
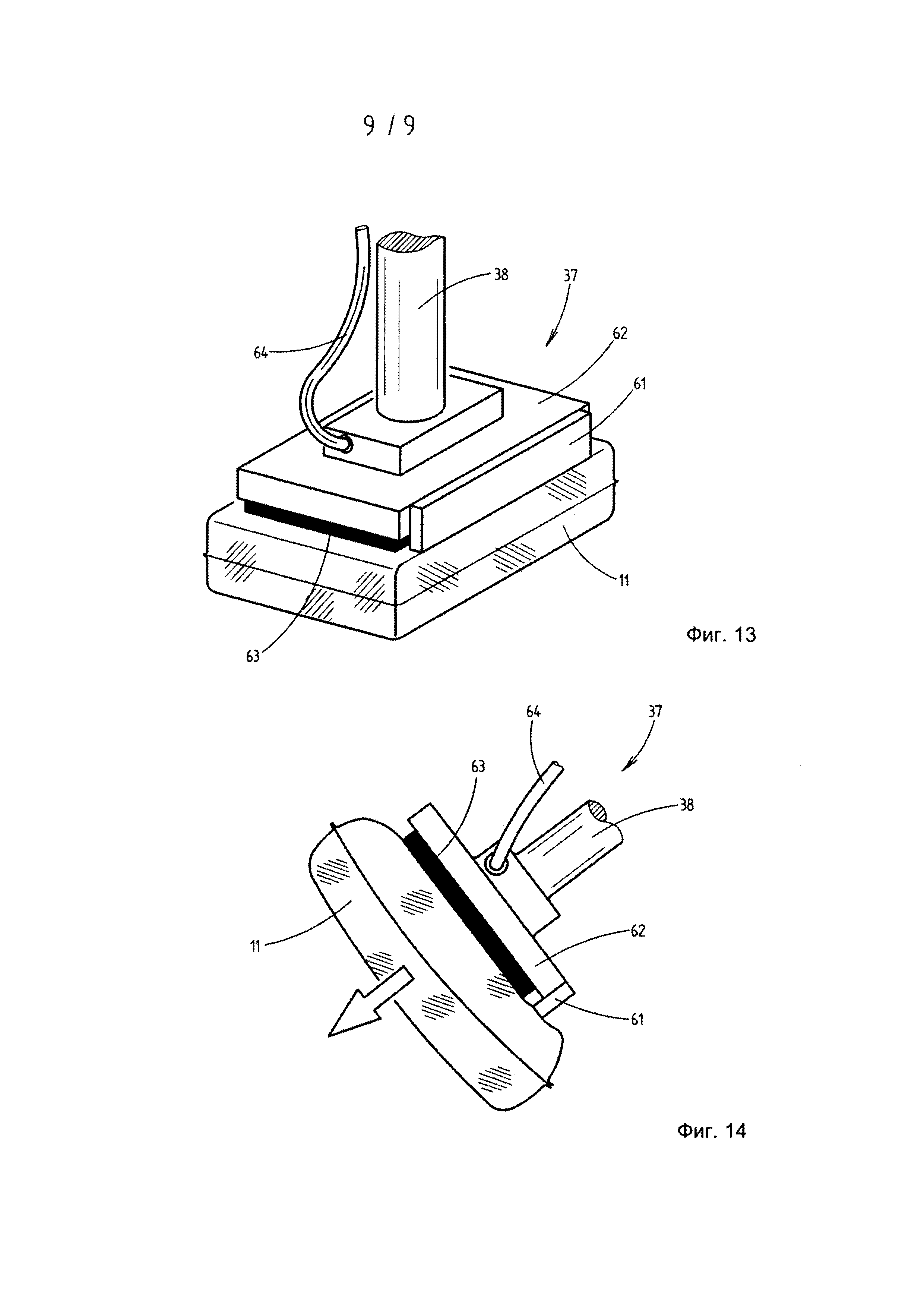
Фиг. 13 - подъемная головка для манипулирования упаковками в увеличенном масштабе в перспективе,
Фиг. 14 - подъемная головка согласно фиг. 13 - с упаковкой - в виде сбоку.
Фиг. 1 и фиг. 2 показывают предпочтительный пример применения настоящей технологии, а именно заполнение емкости или же картонной коробки 10 большого объема множеством отдельных предметов, а именно упаковок 11. Последние могут быть выполнены в виде пакетов или могут иметь прямоугольную, в настоящем случае плоскую, форму. Пример на фиг. 1 относится к упаковке 11 с пленочной оболочкой, прежде всего, для целлюлозных изделий, таких как женские гигиенические прокладки.
Большее количество упаковок 11 следует размещать в картонной коробке 10 в различном расположении таким образом, чтобы она была заполнена оптимально. Прямоугольная картонная коробка образует донную стенку 12, боковые или же вертикальные продольные стенки 13, 14, меньшие поперечные стенки 15, 16, а также верхнюю стенку из продольных напусков 17, 18 и поперечных напусков 19, 20.
В примере на фиг. 2 на донной стенке 12 неподвижно расположено некоторое количество упаковок 11 в вертикальном положении, причем упаковки 11 данной группы прилегают друг к другу большими по площади сторонами упаковок. Другие упаковки 11 находятся тоже в вертикальном положении, однако расположены в поперечном направлении с прилеганием к продольной стенке 13. В области вертикальных упаковок 11 позиционированы плоско лежащие упаковки 11, которые лежат на вертикальных упаковках 11 большими по площади сторонами упаковок.
Основная конструкция устройства для введения упаковок 11 в картонные коробки 10 состоит из подвода 21 картонных коробок, подвода 22 упаковок, упаковочной станции 23 и картонажной станции 24 для манипулирования заполненными картонными коробками 10 и их отгрузки. Соотнесенные с отдельными станциями органы и агрегаты соединены машинной станиной 25.
Основными агрегатами устройства являются манипуляционный аппарат для (порожних и заполненных) картонных коробок, а также другой манипуляционный аппарат для упаковок 10. Оба манипуляционных аппарата выполнены так, что при введении упаковок 11 в картонную коробку 10, с одной стороны, картонные коробки и, с другой стороны, упаковки могут выполнять комплексные, согласованные между собой движения. Оба манипуляционных аппарата выполнены в данном случае в виде роботов.
Первый робот, а именно картонажный робот 26, служит для манипулирования картонными коробками 10. В данном случае картонажный робот 26 установлен с возможностью вращения на верхней поперечной балке 27 машинной станины 25. Направленный вниз несущий рычаг 28 является поворачиваемым и соединен с нижней стрелой 29. Соответственно этому она является поворачиваемой в вертикальном направлении и горизонтальном направлении и сверх этого изменяемой по длине (телескоп). На свободном конце стрелы 29 размещен выполненный особым образом держатель 30 картонной коробки. Он через подставку 31 соединен с возможностью поворота с концом стрелы 29. Подведенные на транспортере 32 упаковок упаковки 11 принимаются посредством приданного манипуляционного аппарата и вводятся в удерживаемую наготове картонную коробку 10. Для этого предусмотрен робот, а именно упаковочный робот 33. Он расположен в области упаковочной станции 23, а именно в верхней части машинной станины 25, то есть на продольной балке 34. Упаковочный робот 33 выполнен двухрычажным с поворотным рычагом 35 и размещенным на нем выносным рычагом 36. Рычаги 35, 36 являются поворачиваемыми относительно друг друга и вращаемыми вокруг вертикальной или же горизонтальной оси. На свободном конце выносного рычага 36 размещен носитель упаковки для захватывания и транспортировки упаковок 11. Речь идет о выполненной особенным образом головке 37 (фиг. 13), которая каждый раз захватывает по одной упаковке 11 за свободную верхнюю сторону (большая по площади сторона упаковки), преимущественным образом с помощью всасываемого воздуха, и которая принимает упаковки 11 одна за другой от транспортера 32 упаковок и подводит на упаковочной станции 23 к удерживаемой наготове картонной коробке 10. Через поворачиваемую и вращаемую несущую штангу 38 головка соединена с выносным рычагом 36. Управление головкой 37 и подключение к ней линии всасываемого воздуха может происходить через несущую штангу 38.
Манипуляционные аппараты для картонных коробок 10 и упаковок 11, то есть картонажный робот 26 и упаковочный робот 33, работают согласованным между собой образом, прежде всего в области картонажной станции 24 при заполнении картонной коробки 10. Картонажный робот 26 транспортирует (сначала порожнюю) картонную коробку 10 к упаковочной станции 23, держит там картонную коробку 10 наготове и во время упаковочного процесса производит определенные движения картонной коробки 10. Держатель 30 картонной коробки выполнен так, что картонная коробка 10 захватывается снаружи в находящейся на удалении от раскрытой стороны области, прежде всего в области донной стенки 12 и в примыкающих областях боковых стенок, прежде всего продольных стенок 13, 14.
Во время заполнения картонной коробки 10 она держится наготове посредством картонажного робота 26 в разных, прежде всего меняющихся, относительных положениях. Когда упаковки 11 (по отдельности) вводятся в картонную коробку 10, упаковочный робот 33 или же его головка 37 тоже выполняет разные, согласованные с положением картонной коробки движения. Вследствие этого являются выполнимыми различные форматы упаковки (пример на фиг. 2). Манипуляционные аппараты для картонных коробок 10 и упаковок 11 выполнены, преимущественным образом так, что держатель 30 картонной коробки имеет при движении несколько, прежде всего шесть, степеней свободы (фиг. 12). Целесообразным образом головка 37 картонажного робота 33 вследствие соответствующего расположения тоже движется соответственно. Речь идет о линейных перемещениях соответственно трем координатам 39, 40 и о вращательном или же поворотном движении вокруг обозначенных двойными стрелками 41, 42 осей вращения. Координатами 39, 40 определяются перемещения вдоль осей X, осей У и осей Z. Движения картонных коробок 10, с одной стороны, и упаковок 11, с другой стороны, осуществляются через общее, центральное устройство управления для обоих роботов 26, 33.
Картонные коробки 10 подводятся в области подвода 21 картонных коробок посредством транспортера 43 картонных коробок со следующими друг за другом частичными транспортерами 44, 45 в выполнении в виде ленточных транспортеров картонажной станции 24. Картонные коробки 10 являются в значительной мере полностью сложенными вплоть до (направленных вверх) складываемых напусков 17-20. Продольные напуски 17, 18 указывают в направлении транспортировки.
На картонажной станции 24 каждая порожняя картонная коробка принимается картонажным роботом 26 или же его держателем 30 картонной коробки. Вследствие особенного выполнения и принципа работы держателя 30 картонной коробки является возможным позиционировать принимаемую в каждом случае (порожнюю) картонную коробку 10 посредством относительного перемещения в рабочей области (раскрытого) держателя 30 картонной коробки. Держатель 30 картонной коробки выполнен по существу (в поперечном сечении) U-образным, а именно с удерживающими органами со стороны днища и вертикальными боковыми удерживающими органами. Расположение принято таким, чтобы в продолжение движения подвода по окончании транспортера 43 картонных коробок порожняя картонная коробка могла быть введена непосредственно в держатель 30 картонной коробки. После приема картонной коробки держателем картонной коробки его удерживающие органы перемещаются, чтобы эффективно захватить картонную коробку. Для этого на держателе 30 картонной коробки размещены удерживающие органы 46, 47, которые, преимущественным образом, захватывают картонную коробку 10 в позиции удержания в области днища 12 и соседних вертикальных стенок картонной коробки - продольных стенок 13, 14.
Удерживающие органы 46, 46 держателя 30 картонной коробки имеют, во-первых, механические опорные или же направляющие органы и, во-вторых, вакуумные держатели, которые действуют с внешней стороны картонной коробки. Выполненный таким образом держатель картонной коробки расположен на стреле картонажного робота 26, а именно на подставке 31 на конце стрелы 29 картонажного робота 26. Штангообразная подставка 31 имеет (прямоугольный) наконечник 48, на котором закреплены органы держателя картонной коробки.
Боковые удерживающие органы 46 действуют в обращенной к донной стенке 12 (нижней) области боковых стенок - продольных стенок 13, 14. Каждый из выполненных в виде блока боковых удерживающих органов 46 установлен с возможностью перемещения на общем носителе (в поперечном направлении), а именно на поперечной штанге 50, которая соединена с наконечником 48. Каждому удерживающему органу 46 придана трубо- или же гильзовидная поперечина 51, которая является перемещаемой по поперечной штанге 50, а именно из положения раскрытия (фиг. 10, слева) с удалением от картонной коробки 10 в положение удержания для захватывания картонной коробки (фиг. 10, справа). Соотнесенные с донной стенкой 12 удерживающие органы 47 позиционированы с кромочной стороны (к донной стенке), то есть по соседству с боковыми стенками 13, 14. Оба удерживающих органа 47 расположены на носителе 52 - в выполнении в виде несущего рычага.
Для захватывания картонной коробки 10 удерживающие органы 46, 47 имеют присосы 54, 55. Удерживающие органы 47 со стороны днища имеют некоторое количество расположенных друг возле друга присосов 54, которые с помощью (пневматического) цилиндра 53 являются перемещаемыми вверх и вниз, а именно до прилегания к донной стенке 12 для захватывания картонной коробки. При прилегании к картонной коробке 10 присосы 54 являются нагружаемыми пониженным давлением.
Боковые удерживающие органы 47 тоже имеют присосы 55, которые установлены на передвигаемых поперек цилиндрах 56. Данные присосы 55 посредством соответствующих цилиндров 56 могут быть переведены из исходного положения (фиг. 10, слева) в положение удержания (фиг. 10, справа) с прилеганием к боковой стенке картонной коробки 10. Усилие удержания передается на картонную коробку посредством подачи пониженного давления.
На держателе 30 картонной коробки установлены перемещаемые направляющие органы, которые обеспечивают введение и выравнивание картонной коробки 10 в область или же в области держателя 30 картонной коробки. При этом речь идет об выполненных в виде шины, простирающих продольно направляющих профилях 57 с обеих сторон картонной коробки 10 (фиг. 10). Каждый из состоящих, преимущественным образом, из имеющего форму уголка листа направляющих профилей 57 имеет по вертикальному боковому плечу 58 и по горизонтальному донному плечу 59. Направляющие профили 57 соединены с передвигаемыми поперек удерживающими органами 46, то есть с направляющими элементами 51. Соответственно этому направляющие профили 57 с присосами 55 смещаются из отведенного назад исходного положения (фиг. 10, слева) в положение юстировки (фиг. 10, справа). С входной стороны, а именно со стороны поступления (порожней) картонной коробки 10, направляющие профили 57 снабжены воронкообразным расширением 60 (фиг. 11).
Усилие удержания передается на картонную коробку 10 преимущественно посредством присосов 54, 55. Целесообразным образом большее усилие удержания создается в области донной стенки 12. Как видно из фиг. 11, в области донного плеча 59 в продольном направлении картонной коробки 10 расположено несколько - пять - присосов 54. В области боковых стенок 13, 14 в данном случае расположены, находясь друг возле друга (на общем носителе), два присоса 55. Плечи 58, 59 направляющего профиля 57 имеют отверстия для прохождения соответствующих присосов 54, 55. Горизонтальные донные плечи 59 расположены, преимущественным образом, приблизительно на уровне транспортера 43 картонных коробок как его продолжение.
Подведенная (порожняя) картонная коробка 10 переносится картонажным роботом 26 из картонажной станции 24 на упаковочную станцию 23 и там держится наготове для заполнения. Раскрытая сторона картонной коробки обращена к упаковочному роботу 33 или же к его головке 37 (фиг. 7, фиг. 8). Преимущественным образом, картонная коробка удерживается в (изменяемом) наклонном положении. В зависимости от размеров картонной коробки 10 и упаковок 11, а также от их количества упаковки 11 укладываются на донную стенку 12 с выполнением одной или нескольких стоп. Упаковочный робот 33 захватывает по одной упаковке 11 (или несколько упаковок, находящихся рядом), удерживает ее, прежде всего, в области большой поверхности с помощью всасываемого воздуха (фиг. 13) и погружает вместе с головкой 37 и (частично) выносным рычагом 36 в картонную коробку 10.
Альтернативно, упаковки 11 вводятся в картонную коробку 10 так, что они ориентируются узкими сторонами к донной стенке 12, а большими поверхностями упаковок прилегают к боковым стенкам картонной коробки 10. В данном случае упаковки 11 вводятся в картонную коробку 10 посредством толкания. Головка 37 выполнена так, что задана функция толкателя. По меньшей мере с одной стороны головки расположена подающая планка 61, которая для вталкивания прилегает к (узкой) боковой поверхности упаковки 11 (фиг. 7). Движение вталкивания является выполнимым посредством движения головки 37 (вследствие соответствующего манипулирования упаковочного робота 33). Подающая планка 61 расположена сбоку на несущей пластине 62 головки 37 и определена или же расположена по высоте так, что при захватывании упаковки 11 свободная кромка подающей планки 61 прилегает к ней. Со свободной стороны несущей пластины 62 головка 37 снабжена одним или несколькими всасывающими органами для захватывания упаковки 11, в данном случае - пластинообразным всасывающим корпусом 63 из эластичного материала (пеноматериала) и, преимущественным образом, несколькими всасывающими отверстиями (не показаны). Пониженное давление для захватывания упаковки 11 подводится к всасывающему корпусу 63 через (всасывающую) линию 64 и через несущую пластину 62.
Вследствие расположения подающая планка служит в качестве опорного органа при приеме упаковки 11. Так как она захватывается только в области наружной оболочки (верхняя пленочная стенка), получается неблагоприятное деформирование (нестабильной) упаковки 11. Прилегающая к упаковке 11 вследствие относительного положения подающая планка 61 вызывает компенсацию перекошенного положения упаковки 11.
Упаковочная станция 23 может быть оснащена применяемым при вталкивании упаковок 10 вспомогательным средством, а именно выдвижной пластиной 49. Она расположена в области упаковочной станции 23 сбоку рядом с транспортером 32 упаковок, а именно как продолжение опорной поверхности для передвигаемой со скольжением упаковки 11. Выдвижная пластина 49 пролегает по существу в плоскости транспортера 32 упаковок как его продолжение, преимущественным образом до области удерживаемой наготове картонной коробки 10 (фиг. 7). Головка 37 расположена, преимущественным образом, на небольшом расстоянии выше выдвижной пластины 49 в значении толкающего движения. Выдвижная пластина 49 является отводимой назад - для случая загрузки согласно фиг. 8.
Упаковочной станции 23 придан держатель 65 напусков для фиксации закрывающихся напусков 17-20 картонной коробки в положении раскрытия во время процесса заполнения. Держатель 65 напусков закреплен на машинной станине 25, а именно в области над рабочей плоскостью упаковочной станции 23 и на несущем профиле 66 машинной станины 25 - в плоскости (верхней) продольной балки 34.
Держатель 65 напусков состоит из нескольких, преимущественным образом передвигаемых, органов, которые фиксируют направленный вверх поперечный напуск 19 и оба - в настоящем относительном положении - вертикальных продольных напуска 17, 18 в воронкообразном положении раскрытия. Первая, приблизительно средняя удерживающая перемычка 67 поддерживает прилегание к внутренней стороне поперечного напуска 19 (фиг. 7). Для позиционированных сбоку продольных напусков 17, 18 предназначены опорные перемычки 68, которые являются перемещаемыми по удерживающей штанге 69, а именно по направлению друг к другу или друг от друга. Когда картонная коробка 10 попадает на упаковочную станцию 23, обе опорные перемычки 68 движутся друг от друга из почти среднего исходного положения в противоположных направлениях, вследствие чего складываемые напуски 19, 20 приходят в положение раскрытия согласно фиг. 9. Направленный поперек напуск 19 удерживается посредством удерживающей перемычки 67 тоже в положении раскрытия.
Опорные перемычки 68 являются перемещаемыми вместе с гильзообразными направляющими по удерживающей штанге 69 с подгонкой к ширине картонной коробки 10.
Картонажный робот 26 берет на себя также задачу отгрузки заполненной картонной коробки 10 из области упаковочной станции 23 по частичному участку. Заполненная картонная коробка 10 (снова) отставляется посредством картонажного робота 26 на картонажной станции 24 или же удерживается посредством держателя 30 картонной коробки в положении сталкивания на стыке с транспортером 43 картонных коробок, а именно в конце частичного транспортера 45. Затем картонная коробка 10 - еще при открытых закрывающихся напусках 17-20 - выталкивается из области держателя 30 картонной коробки и передается на отгрузочный транспортер 70. Он транспортирует картонную коробку 10 в поперечном направлении к выпускной транспортерной ленте 71 снова поперек направления транспортировки в области отгрузочного транспортера 70. Примыкающий к картонажной станции 24 отгрузочный транспортер 70 выполнен в виде линейного транспортера с (имеющим форму уголка) толкателем 72, который является перемещаемым возвратно-поступательно посредством линейного привода 73, причем в исходном положении (фиг. 4) картонная коробка 10 попадает в позицию захвата толкателем 72. Фиг. 6 показывает противоположное конечное положение толкателя 72, в котором картонная коробка 10 отставляется на выпускную транспортерную ленту 71. В области отгрузочного транспортера 70 картонная коробка 10 стоит или же покоится на (пластинообразной) подкладке 74. По ней картонная коробка 10 транспортируется со скольжением посредством толкателя 72.
Особенностью является транспортировка картонных коробок 10, а именно заполненной картонной коробки, с одной стороны, и следующей порожней картонной коробки, с другой стороны, в области картонажной станции 24. Заполненная картонная коробка выталкивается из области держателя 30 картонной коробки посредством толкающего органа. Одновременно в держатель 30 картонной коробки вводится, в данном случае посредством того же органа, следующая (порожняя) картонная коробка 10. Выполненный в форме уголка выталкиватель 75 с захватом или же плечом 76 находится в области между двумя следующими друг за другом картонными коробками. На действующем как толкатель плече 76 с обращенной к сталкиваемой (заполненной) картонной коробке 10 стороны расположен опорный профиль 77, который поддерживает прилегание к задней стороне картонной коробки 10 - к поперечной стенке 15 с задней стороны. Посредством линейного привода 78, расположенного рядом с траекторией движения картонных коробок, удерживаемая наготове посредством картонажного робота 26 картонная коробка 10 (с содержимым) выталкивается посредством выталкивателя 75 из области держателя 30 картонной коробки и сталкивается на подкладку 74 отгрузочного транспортера 70.
Выталкиватель 75 одновременно вызывает передачу на удерживаемый наготове держатель 30 картонной коробки следующей порожней картонной коробки 10. Выталкиватель 75 или же направленное поперек плечо 76 имеет захват для следующей картонной коробки 10, а именно два всасывающих органа 79, которые по отношению к направлению транспортировки обращены назад, поддерживают прилегание к находящейся спереди стенке картонной коробки 10 - к поперечной стенке 16 - и захватывают ее с помощью всасываемого воздуха. Во время движения сталкивания заполненной картонной коробки 10 посредством выталкивателя 75 подтягивается следующая порожняя картонная коробка и передается на держатель 30 картонной коробки (фиг. 4).
Согласованные между собой в отношении относительных движений принципы действия роботов 26, 33 являются применимыми при создании комплексных форматов упаковки даже при манипулировании упаковками и/или картонными коробками с различными размерами и/или формами, на которые во время упаковочного процесса могут быть оптимально настроены положения картонной коробки, с одной стороны, и перемещения упаковок, с другой стороны.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 картонная коробка
11 упаковка
12 донная стенка
13 продольная стенка
14 продольная стенка
15 поперечная стенка
16 поперечная стенка
17 продольный напуск
18 продольный напуск
19 поперечный напуск
20 поперечный напуск
21 подвод картонных коробок
22 подвод упаковок
23 упаковочная станция
24 картонажная станция
25 машинная станина
26 картонажный робот
27 поперечная балка
28 несущий рычаг
29 стрела
30 держатель картонной коробки
31 подставка
32 транспортер упаковок
33 упаковочный робот
34 продольная балка
35 поворотный рычаг
36 выносной рычаг
37 головка
38 несущая штанга
39 координаты
40 координаты
41 двойная стрелка
42 двойная стрелка
43 транспортер картонных коробок
44 частичный транспортер
45 частичный транспортер
46 удерживающий орган
47 удерживающий орган
48 наконечник
49 выдвижная пластина
50 поперечная штанга
51 направляющий элемент
52 носитель
53 цилиндр
54 присос
55 присос
56 цилиндр
57 направляющий профиль
58 боковое плечо
59 донное плечо
60 расширение
61 подающая планка
62 несущая пластина
63 всасывающий корпус
64 линия
65 держатель напусков
66 несущий профиль
67 удерживающая перемычка
68 опорная перемычка
69 удерживающая штанга
70 отгрузочный транспортер
71 выпускная транспортерная лента
72 толкатель
73 линейный привод
74 подкладка
75 выталкиватель
76 плечо
77 опорный профиль
78 линейный привод
79 всасывающий орган
Реферат
Для автоматического введения упаковок в емкости или картонные коробки используют упаковочный робот с держателем картонной коробки и упаковочный робот с головкой для последовательного введения отдельных упаковок в емкость или картонную коробку в области упаковочной станции. При этом головка упаковочного робота выполнена перемещаемой при согласовании с движениями картонажного робота вдоль нескольких, преимущественно вдоль трех координат и поворачиваемой вокруг нескольких, преимущественно вокруг трех осей таким образом, что посредством вращения и/или наклона и/или линейного передвижения картонной коробки и посредством движения подъема, опускания упаковок и/или вращательного движения или посредством вталкивания упаковок картонную коробку заполняют разными форматами упаковок. Группа изобретений обеспечивает повышение производительности при оптимальном заполнении. 2 н. и 13 з.п. ф-лы, 14 ил.
Комментарии