Способ восстановления ориентации орбитального космического аппарата - RU2610766C1
Код документа: RU2610766C1
Чертежи
Описание
Изобретение относится к области космической техники и может быть использовано для восстановления ориентации (ВО) орбитального космического аппарата (КА) из произвольного неориентированного положения в ориентированное положение относительно орбитальной системы координат (ОСК) с использованием в качестве датчика ориентации астродатчика.
Известен способ управления ориентацией, приведенный в статье авторов О.В. Ермошиной, А.П. Крищенко «Синтез программных управлений ориентацией КА методом обратных задач динамики», Москва, МГТУ им. Н.Э. Баумана, 2010 г., 12 с. Недостатком способа является затянутость переходного процесса, связанного с выбором «гладкой» переходной функции, близкой к асимптотическому переходному процессу.
Известен способ ВО, приведенный в книге авторов В.Н. Бранец, И.П. Шмыглевский «Применение кватернионов в задачах ориентации твердого тела». Москва, Наука 1973 г., 320 с. (см. стр. 205-226), где также рассматриваются асимптотические процессы приведения ССК к ОСК.
Известен способ ВО, изложенный в статье «Система ориентации и стабилизации космического аппарата по информации с астродатчиков», Электронный журнал «Труды МАИ». Выпуск №38, который можно принять за прототип. Этот способ включает начальное демпфирование угловых скоростей КА относительно инерциальной - геоцентрической абсолютной системы координат (ИСК), расчет по данным аппаратуры спутниковой навигации (АСН) матрицы А положения орбитальной системы координат (ОСК) относительно ИСК, измерение с помощью астродатчика (АД) матрицы Мro ориентации КА относительно ИСК с последующим расчетом матрицы ориентации S связанных осей КА относительно ОСК по формуле:

К недостатку прототипа также следует отнести повышенное время ВО. С целью сокращения времени на ВО известный способ дополняют новыми операциями. Для этого в задемпфированном положении КА относительно ИСК, фиксируют положение ОСК на момент времени tΦ и рассчитывают проекции и модуль собственного вектора Е матрицы S на оси ОСК-Ф по формулам:

где ЕX, EY, EZ - проекции собственного вектора ориентации КА на соответствующие оси ОСК;
Sij - элементы матрицы S;
Emod - модуль собственного вектора матрицы S,
рассчитывают угол Эйлера (угол конечного поворота) для приведения КА к ОСК-Ф, зафиксированной относительно ИСК на время tΦ, по формуле:

где angVO - угол Эйлера.
Задают программную скорость ωПР вращения КА вокруг собственного вектора до совпадения связанных осей КА с осями ОСК-Ф, при этом программные скорости по осям КА рассчитывают по формулам:

а время конечного поворота по формуле:

где К<1 - коэффициент упреждения (определяется экспериментально). В течение расчетного времени tПР поворачивают КА одновременно по каждой оси ориентации с угловыми скоростями




где ωo - допустимое значение угловой скорости КА,
вновь определяют матрицу ориентации S, по элементам которой находят углы ориентации КА относительно ОСК, например, для последовательности поворотов ψ, ϑ, γ по формулам:

проверяют условия приведения углов ориентации КА к наперед заданным значениям:

где ψЗАД, ϑЗАД, γЗАД - заданные значения углов ориентации КА,
в случае невыполнения которых повторяют заново операции ВО, дожидаются одновременного выполнения условий демпфирования угловых скоростей и приведения углов до заданных величин, после чего переводят систему в режим астроориентации КА по показаниям астродатчика.
Ниже приведен пример практической реализации.
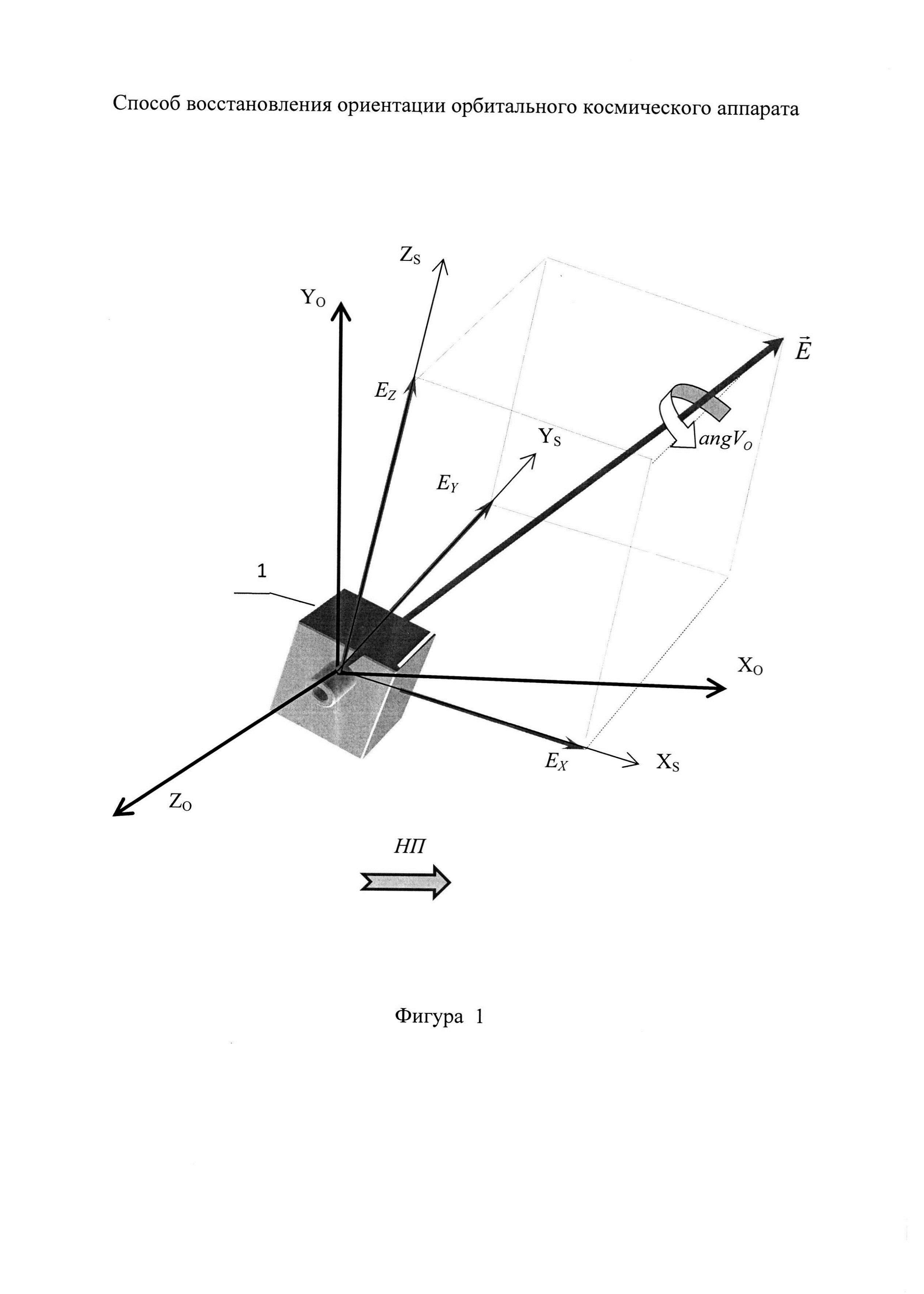
На фиг. 1 показана кинематическая схема ВО, где обозначено:
1 - КА;
НП - направление полета;
X0Y0Z0 - ОСК;
XSYSZS - ССК;
angVO - угол Эйлера (угол конечного поворота);
ЕX, ЕY, EZ - проекции собственного вектора ориентации КА на оси ОСК, равные проекциям на оси ССК;
Sij - элементы матрицы S;
Emod - модуль собственного вектора матрицы S.
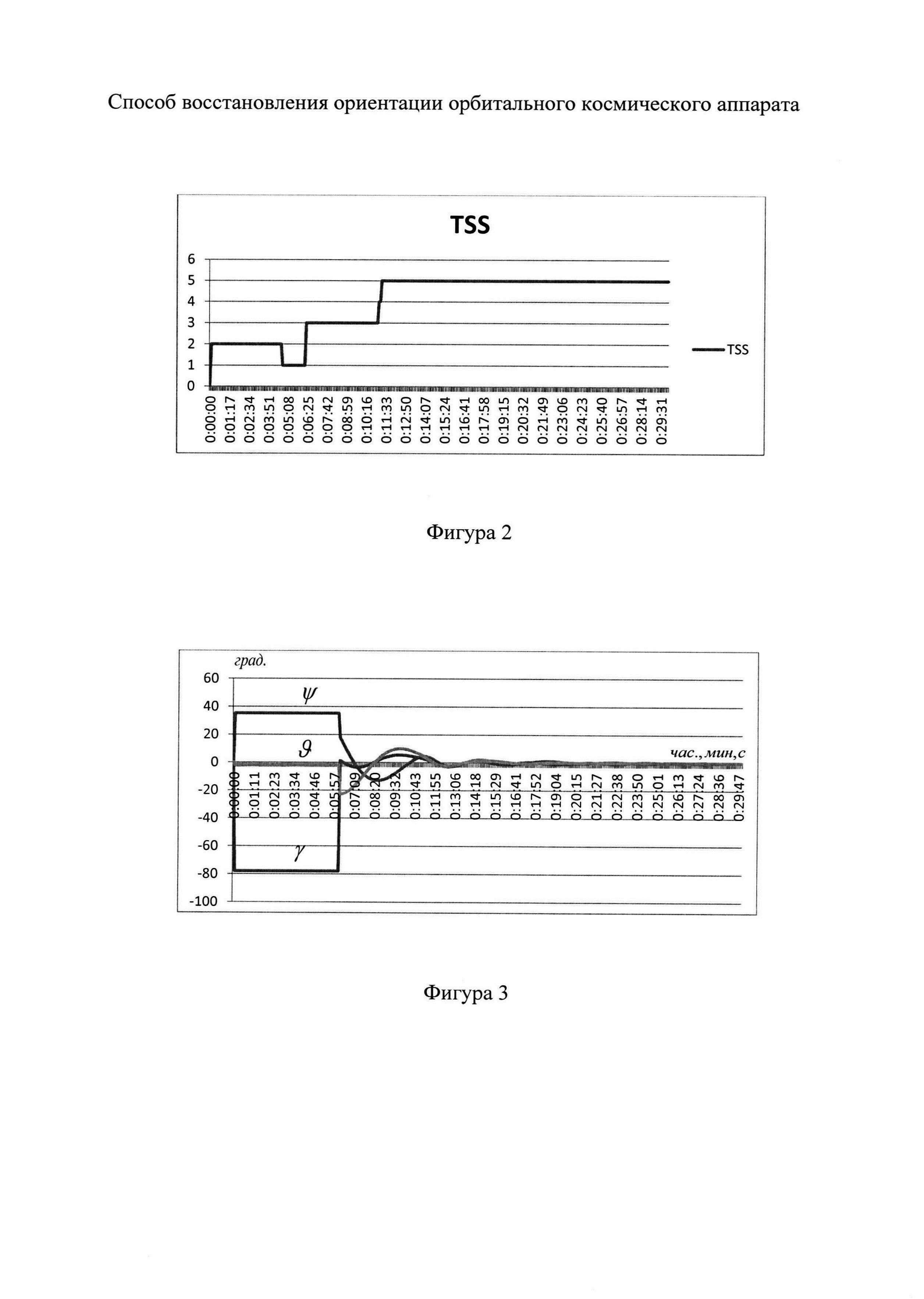
На фиг. 2 обозначено:
1 - участок демпфирования на маховиках;
2 - участок программного поворота;
3 - участок включения астрокоррекции;
4 - участок текущей астроориентации;
TSS - текущее состояние системы.
На фиг. 3 обозначено:
ψ, ϑ, γ - углы ориентации КА относительно ОСК по курсу, тангажу и крену соответственно.
При использовании АД для ВО необходимо снизить (задемпфировать) угловые скорости КА по связанным осям до скоростей ωo, при которых АД становится работоспособным и выдает в систему ориентации положение КА относительно ИСК в виде кватерниона или матрицы - Mro.
После того как КА приобретает скорости, меньшие ωo, по показаниям АД и навигационной системы рассчитывают матрицу S ориентации КА относительно ОСК:

где AT транспонированная матрица ориентации ОСК относительно ИСК, получаемая из навигационной системы КА. По элементам матрицы Sij для фиксированного момента времени - tΦ рассчитывают проекции собственного вектора (вектора конечного поворота) Е на связанные оси КА, которые буду равны также проекциям собственного вектора Е на оси ОСК, и угол конечного поворота для приведения КА к ОСК-Ф (Фиг. 1), т.е. к фиксированному положению ОСК относительно ИСК на момент времени tΦ. Расчеты проводят по формулам (3, 5). После этого задаются величиной программной скорости


Так как вращение осуществляется с помощью ИО, расположенных по связанным осям, то необходимо найти проекции


Поворачивают КА со скоростями (4), например, путем введения в закон стабилизации КА по угловой скорости смещений на величины программных скоростей (8):

По окончании времени tПР проверяют выполнение условий (8). Переходный процесс показан на фиг. 3. Если углы ориентации не будут находиться в заданных пределах (8), то операции ВО повторяют, пока не будут выполнены одновременно условия (6) и (8), после чего переводят систему в режим астроориентации КА по показаниям астродатчика.
Реферат
Изобретение относится к области космической техники и может быть использовано при разработке ускоренного режима восстановления ориентации орбитального космического аппарата (КА) с применением астродатчика. Восстановление ориентации КА производится из демпфированного относительно инерциальной - геоцентрической абсолютной системы координат произвольного положения КА. При этом демпфирование осуществляется до угловых скоростей КА, при которых восстанавливается работоспособность астродатчика. Восстановление ориентации КА выполняется одним поворотом вокруг оси Эйлера с упреждающим отключением программного поворота для снижения угловой скорости КА и снятия ограничений на включение контура коррекции от астродатчика. Техническим результатом изобретения является сокращение времени восстановления ориентации КА. 3 ил.
Формула











Комментарии