Робототехническая система сервисного космического аппарата с силомоментной обратной связью - RU2620540C1
Код документа: RU2620540C1
Чертежи

Описание
Изобретение относится к области инструментов для использования в космосе и предназначено для выполнения операций орбитального обслуживания космических аппаратов, таких как инспекция, управление движением космических аппаратов, ремонтно-восстановительные и сборочные операции с применением робототехнической системы, обладающей силомоментной обратной связью.
Известна робототехническая система дозаправки спутников (патент US 2008/0237400, кл. B64G 1/22, B64D 39/06, В65 В 57/06, B64G 1/64), включающая манипулятор, набор инструментов, обладающих возможностью присоединения к выходному звену манипулятора, необходимых для получения доступа к топливному клапану обслуживаемого спутника, его открытия и закрытия, магазин сменного инструмента с устройствами крепления для хранения и возвращения инструментов и разнообразных крышек клапанов. В состав системы входят видеокамеры, направленные на манипулятор и его выходное звено; изображение, поступающее с них, передается оператору для обеспечения ему возможности направлять и контролировать процедуру дозаправки. Система также может быть настроена для управления автономно под контролем бортового компьютера. К недостаткам такой системы можно отнести ее узкую специализацию и невозможность выполнения широкого спектра операций орбитального обслуживания космических аппаратов, в том числе некооперируемых.
Наиболее близким к предложенному техническому решению, взятым за прототип, является робототехническая система сервисного космического аппарата (патент RU 157142 U1, кл. B64G 4/00), включающая базовый блок, семистепенной манипулятор, набор сменных инструментов, выполненных с возможностью присоединения к выходному звену манипулятора, и магазин сменных инструментов с универсальными устройствами крепления инструментов набора. Система может управляться удаленно оператором, например, с Земли, с материнского космического аппарата или с космической станции. Система также может быть настроена для управления автономно под контролем бортового компьютера.
Выполнение операций сервисного обслуживания спутника происходит следующим образом: осуществляют захват манипулятором необходимого инструмента из магазина сменного инструмента с помощью устройства фиксации сменного инструмента; после захвата инструмента манипулятором происходит размыкание универсального устройства крепления инструмента и сменный инструмент свободно извлекается для выполнения операции. По окончании операции инструмент возвращается в магазин сменного инструмента в любое свободное универсальное устройство крепления инструмента, которое фиксирует инструмент, в то время как размещенное на манипуляторе устройство фиксации сменного инструмента высвобождает его.
Из описания прототипа следует, что для выполнения операции орбитального обслуживания спутника достаточно робототехнической системы, включающей в себя манипулятор с семью степенями свободы, оканчивающийся устройством фиксации сменных инструментов, магазин сменных инструментов, жестко фиксированный относительно места крепления манипулятора. Однако для выполнения широкого спектра операций орбитального обслуживания космических аппаратов с повышенным качеством и уменьшенными временными затратами, в том числе с использованием электроинструмента, и безопасного функционирования робототехнической системы в недетерминированных внешних условиях необходим более совершенный манипулятор, очувствленный по усилию и обладающий разъемом для питания электроинструмента, расширенный набор сменных инструментов, включающий в себя электроинструмент, магазин сменного инструмента, обеспечивающий легкий доступ захватного устройства манипулятора из его произвольного положения к сменному инструменту. К недостаткам прототипа можно также отнести отсутствие обзорного блока, обеспечивающего оператора полной видеоинформацией о состоянии робототехнической системы при работе в режиме ручного управления.
Задачами заявляемого изобретения являются расширение спектра выполняемых сервисных операций орбитального обслуживания космических аппаратов, в том числе некооперируемых, повышение их качества, уменьшение время затрат на их выполнение и обеспечение безопасности функционирования робототехнической системы.
Указанные задачи решаются за счет того, что в составе предлагаемой робототехнической системы сервисного космического аппарата, включающей манипулятор, набор инструмента, обладающий возможностью присоединения к выходному звену манипулятора, магазин сменного инструмента, выходное звено манипулятора имеет разъем для питания сменного электроинструмента, шарниры манипулятора снабжены датчиками вращающего момента, выходное звено манипулятора - датчиком усилий и моментов, их наличие позволяет контролировать внешние усилия и моменты, воздействующие на манипулятор при выполнении технологических операций, а магазин сменного инструмента может вращаться вокруг своей оси и, таким образом, подавать инструмент к заданному месту захвата, что позволяет ускорить операцию извлечения инструмента из магазина, при этом в магазине сменного инструмента размещается набор инструмента, дополнительно содержащий электроинструмент для сверления отверстий, электроинструмент для закручивания/откручивания деталей с резьбой, электрический термометр, инструмент для перекусывания деталей, и инструмент для очистки стеклянных поверхностей. Кроме того, дополнительно введен модуль ориентации, представляющий собой четырехстепенной манипулятор с закрепленным на его оконечном звене обзорным блоком. Модуль ориентации может вращаться вокруг магазина сменного инструмента независимо от него, что обеспечивает возможность получения видеоинформации не только о манипуляторе и его выходном звене, но и о робототехнической системе в целом и об окружающем ее пространстве.
Техническим результатом являются повышение качества и обеспечение безопасности выполнения сервисных операций за счет возможности контроля внешних усилий и моментов, воздействующих на манипулятор при выполнении технологических операций, а также снижение временных и энергетических затрат на обслуживание космического аппарата за счет использования вращающегося магазина сменного инструмента и видеонаблюдения с широкой зоной обзора в ручном режиме управления.
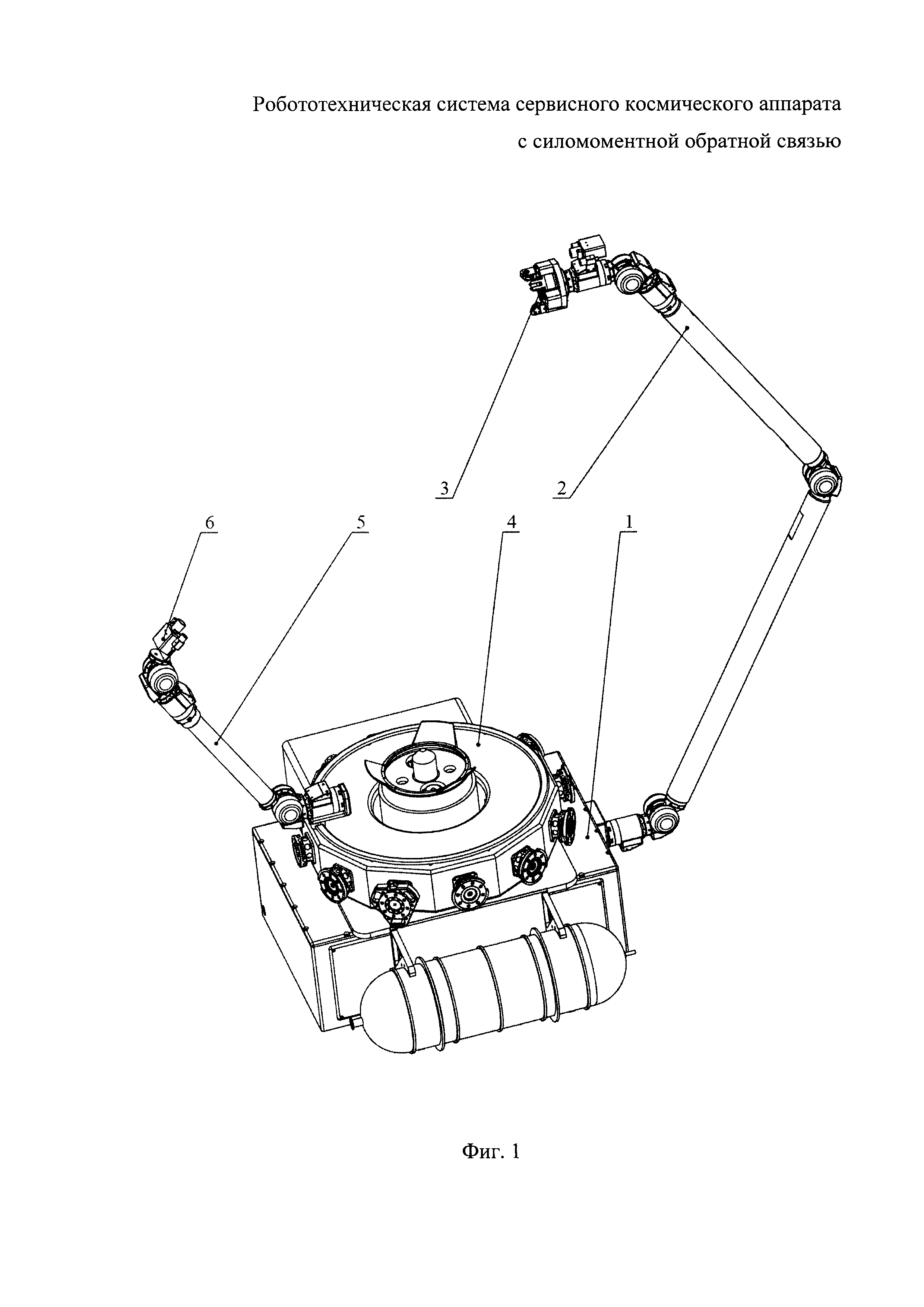
На Фиг. 1 представлена робототехническая система сервисного космического аппарата с силомоментной обратной связью.
На Фиг. 2 представлен набор сменного инструмента.
Робототехническая система сервисного космического аппарата с силомоментной обратной связью для выполнения операций орбитального обслуживания имеет в своем составе базовый блок 1, семистепенной манипулятор 2, выходное звено которого имеет разъем для питания электроинструмента 3, магазин сменного инструмента 4 с универсальными устройствами крепления инструмента, модуль ориентации 5 с обзорным блоком 6. Каждый шарнир манипулятора 2 снабжен датчиками момента, а выходное звено - датчиком усилий и моментов, их наличие позволяет контролировать внешние усилия и моменты, воздействующие на манипулятор при выполнении технологических операций. Магазин сменного инструмента представляет собой платформу, расположенную в центральной части базового блока и вращающуюся вокруг своей оси. Модуль ориентации с обзорным блоком представляет собой манипулятор с четырьмя степенями свободы, который может вращаться вокруг платформы магазина сменного инструмента независимо от нее, обеспечивая увеличение обзорной зоны видеонаблюдения. По периметру платформы магазина сменного инструмента в универсальных устройствах крепления зафиксированы инструменты из набора.
Набор включает в себя в том числе:
- электроинструмент для сверления отверстий 7;
- электроинструмент для закручивания/откручивания деталей с резьбой 8;
- электрический термометр 9;
- инструмент для перекусывания деталей 10;
- инструмент для очистки стеклянных поверхностей 11.
Выполнение операции сервисного обслуживания начинается с захвата манипулятором необходимого инструмента, который подается к заданному месту захвата поворотом магазина сменного инструмента, что ускоряет извлечение инструмента из магазина. После захвата инструмента манипулятором происходит размыкание универсального устройства крепления инструмента и сменный инструмент свободно извлекается для выполнения операции. По окончании операции инструмент возвращается в магазин сменного инструмента в любое свободное универсальное устройство крепления инструмента, которое фиксирует инструмент, в то время как размещенное на манипуляторе устройство фиксации сменного инструмента высвобождает его.
В ходе выполнения операции сервисного обслуживания система управления проводит расчет сил и моментов по всем датчикам, зная характеристики объекта управления и положение манипуляционной системы (положение всех шарниров). В случае отклонения показаний датчиков усилий и моментов от расчетных значений система управления информирует о возникновении нештатной ситуации и производит корректировку положения манипуляционной системы относительно целевого назначения по сигналам датчиков сил и моментов, если коррекция не приводит текущие показания датчиков к расчетным, то система управления останавливает выполнение технологической операции до выяснения причин сбоя.
Оператор путем вращения модуля ориентации с обзорным блоком контролирует ход выполнения технологической операции, получает видеоинформацию о пространстве, окружающем робототехническую систему, что позволяет выяснять причины возникновении нештатной ситуации при сбое в работе робототехнической системы.
Реферат
Изобретение относится к области инструментов для использования в космосе и предназначено для выполнения операций орбитального обслуживания космических аппаратов. Робототехническая система содержит семистепенной манипулятор с конечным звеном в виде устройства для фиксации сменного инструмента, магазин сменных инструментов в виде платформы, вращающейся вокруг своей оси, с универсальными устройствами крепления и набор сменных инструментов. Семистепенной манипулятор снабжен датчиками вращающего момента в каждом из его шарниров. Конечное звено упомянутого манипулятора оснащено датчиком усилий и моментов и разъемом для питания электроинструмента. При этом система снабжена модулем ориентации, представляющим собой четырехстепенной манипулятор с расположенным на нем обзорным блоком, вращающийся вокруг платформы магазина сменных инструментов независимо от нее. Изобретение позволяет повысить качество и обеспечить безопасности выполнения сервисных операций, снизить временные и энергетические затраты на обслуживание космического аппарата. 2 ил.
Комментарии