Устройство для измерения параметров хаотических техногенных и метеоритных космических частиц - RU183905U1
Код документа: RU183905U1
Чертежи


Описание
Полезная модель относится к области космического приборостроения и может быть использована для исследования космического пространства, в частности для обнаружения твердых метеоритных и техногенных тел с размерами менее 1 мм, измерения их параметров, а также для детектирования случайных одиночных и спорадических ударных воздействий частиц космической пыли и мусора, двигающихся с заранее неизвестным вектором скорости.
Известно устройство, являющееся детектором микрометеороидных и техногенных частиц. Детектор содержит мишень в виде пленочного конденсатора, нанесенного на металлическую пластину, приемник ионов, источник постоянного напряжения. Приемник ионов установлен на фиксированном расстоянии от мишени симметрично ее осевой, боковые поверхности детектора состоят из двух расположенных параллельно друг другу сеток, симметрично расположенных относительно оси детектора под углом 60°. Внешние сетки заземлены, а внутренние находятся под плюсовым потенциалом. В непосредственной близости от приемника ионов установлена сетка, находящаяся под минусовым потенциалом. Все внутренние сетки, выходы приемника ионов и мишени соединены с соответствующими усилителями. При определении параметров частиц с помощью данного детектора используются три эффекта: высокоскоростной пробой МДМ-структуры, электростатическая индукция, ионизация материалов частицы и мишени. Составляется система из трех уравнений с тремя неизвестными. Результатом решения этой системы являются искомые скорость, масса и плотность частицы. [Семкин Н.Д., Богоявленский Н.Л., Шепелев С.М., Детектор микрометеороидных и техногенный частиц, патент RU №2348949 G01T 1/34, 28.05.опубл. 10.03.2009 г.]
Недостатками данного аналога является невозможность улавливания и сохранения частицы в процессе измерения ее параметров, измерение динамических характеристик частицы на основании лишь одного физического эффекта - высокоскоростного пробоя МДМ-структуры, невозможность определения точного направления движения частицы.
Также известен другой детектор, более совершенный по информационным и эксплуатационным возможностям. Данный детектор состоит из двух полусферических многослойных PVDF-аэрогельных детекторов, каждый из которых содержит тонкие гибкие обкладки из поляризованного материала с гибкими электродами, калиброванную аэрогельную прокладку, расположенную между обкладками, внешний теплоизоляционный аэрогельный экран-демпфер, внутреннюю аэрогельную подложку, соприкасающуюся одной своей поверхностью с тонкой гибкой обкладкой, а другой - с полусферической оболочкой датчика. Корпус датчика выполнен из нанокомпозиционного материала. В полусферических оболочках установлены закладные L-образные фланцы с гнездами для крепления в них плоских кронштейнов с зажимами. В нижней полусферической оболочке закреплен полый переходник, предназначенный для подвода проводов от электродов детектора к электронному блоку и установки датчика на космический аппарат.[Иванов Н.Н., Иванов А.Н. Датчик для регистрации и замера параметров метеороидных и техногенных частиц, межзвездной и межпланетной пыли, воздействующих на космический аппарат, патент RU №2457986 B64G 1/68, опубл. 10.08.2012 г].
Недостатками данного устройства является недостаточная достоверность измерения из-за использования только одного физического эффекта, а именно взаимодействия высокоскоростной частицы с пьезоактивной пленкой, невозможность точного определения относительной скорости частицы как функции места попадания и прохождения частицей через PVDF-пленки, узкий диапазон измеряемых импульсов частиц при указанных конструктивных параметрах, связанный с тем, что временные метки бортового времени должны составлять 1 мкс, а толщина мерной базы между пленками PVDF составляет 1 мм.
Прототипом заявленной полезной модели является бортовой измерительный модуль для улавливания, сбора, регистрации и измерения параметров метеороидных и техногенных частиц, межзвездной и межпланетной пыли, а также регистрации ионизирующего излучения, воздействующего на космический аппарат, и планетоход-ровер [изобретение RU №2505462, B64G 1/68, опубл. 27.01.2014 г.], содержащий силовой корпус, выполненный в виде сетчато-цилиндрической оболочки, соединенной торцами с полусферическими оболочками. В корпусе верхней полусферической оболочки, с наружной стороны которой нанесено многослойное покрытие из чередующихся слоев поляризованного материала из пьезоактивной пленки и аэрогеля, выполнены сквозные отверстия, в которых закреплены чувствительные элементы датчиков ионизирующего излучения. С наружной стороны корпуса нижней полусферической оболочки нанесено многослойное покрытие, образующее датчик конденсаторного типа. В месте пересечения продольной оси бортового модуля с корпусом нижней полусферической оболочки выполнено сквозное отверстие для подсоединения полого переходника, обеспечивающего установку бортового модуля на корпусе космического аппарата и защиту электрической связи. Бортовой модуль снабжен аэрогельными ловушками, размещенными в съемных открытых кюветах. Кюветы установлены во всех ячейках сетчато-цилиндрической оболочки в несколько параллельных рядов, причем не менее чем в четырех, разнесенных друг от друга на 90°. В кюветах смонтированы многослойные PVDF-аэрогельные детекторы-ловушки частиц, а в остальных кюветах, симметрично установленных относительно продольной оси бортового модуля, размещена сотовая и прямоугольная совокупность аэрогельных ловушек. Корпуса сетчато-цилиндрической и полусферической оболочки, кювет и аэрогельных ловушек выполнены из материала, стойкого к ультрафиолетовому излучению.
Недостатками прототипа являются невозможность определения относительной скорости частицы и устройства и чрезмерная потеря полезной площади детектора вследствие установки внутрь его корпуса датчиков ионизирующего излучения.
Поставлена задача обеспечить возможность определения скорости и направления прилета частицы относительно мишени при их соударении. А также фиксирование частиц и оценка их параметров (скорость, масса, импульс) после прохождения через сенсорные структуры в аэрогельные ловушки с целью их послеполетного исследования.
Решение поставленной задачи достигается тем, что в известном устройстве для измерения параметров хаотических техногенных и метеоритных космических частиц, включающее в себя два полусферических детектора, соединенные кронштейнами с зажимами, установленными в гнезда закладных фланцев, с возможностью параллельного независимого функционирования, пленочные сенсорные структуры PVDF-пьезоактивные гибкие слои и тонкопленочные МДМ-структуры, напыленные и чередующиеся со слоями SiO2-аэрогеля, являющиеся мерными базами для времяпролетного определения скорости частиц и ловушками для неразрушающего улавливания их, внешняя поверхность каждой из полусферических оболочек равномерно замощена шестиугольными кюветами с сенсорно-аэрогельной слоистой структурой, функционирующими одновременно и независимо, механически соединенными винтовыми соединениями с каждой полусферой и электрически соединенными с блоком электроники через посадочные места на поверхности каждой полусферы.
Предложенное устройство отличается от известных тем, что внешняя поверхность полусферических детекторов покрыта не сплошной однородной сенсорной пленкой PVDF или МДМ, а равномерно замощена шестиугольными кюветами с сенсорно-аэрогельной слоистой структурой. Предполагается, что устройство будет экспонироваться во время всего полета космического аппарата на всем диапазоне орбит. Конструктивное решение требует подвода сигнальных и питающих проводов к каждой кювете от блока электроники, а также усложнить сам блок электроники, так как количество каналов приема данных будет равно количеству кювет на обеих сторонах детектора.
Сущность полезной модели поясняется следующими чертежами:
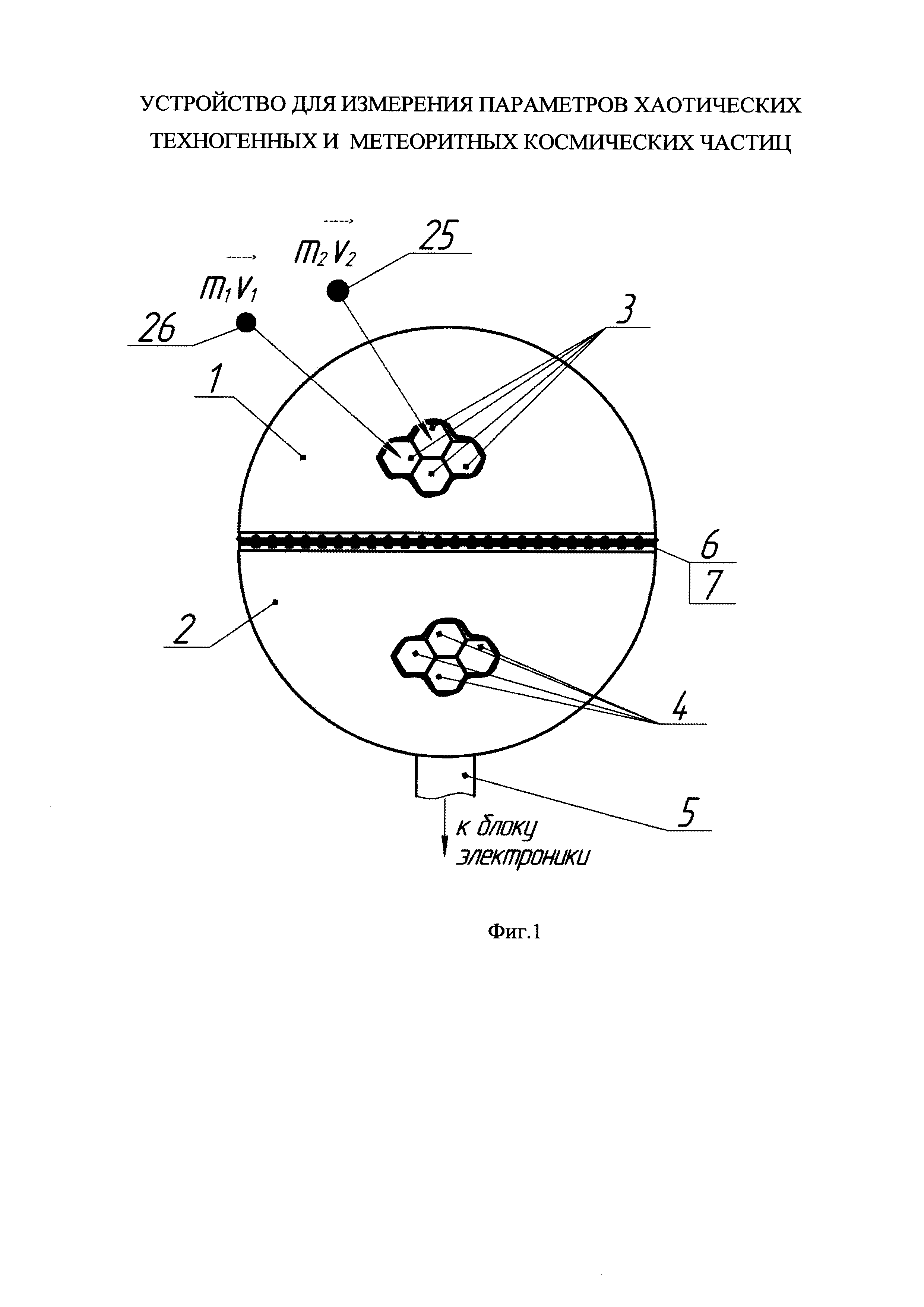
Фиг. 1 - Общий вид сферического детектора частиц.
Фиг. 2 - Схема механического и электрического монтажа кюветы в корпусе.
Фиг. 3 - Торцевой разрез кюветы датчика с PVDF-аэрогельной структурой.
Фиг. 4 - Торцевой разрез кюветы датчика с МДМ-аэрогельной структурой.
Основой конструкции устройства являются две полусферические оболочки 1 и 2 соответственно. Каждая из этих оболочек представляет собой полусферический корпус 8 из нанокомпозитного материала или сплава бериллия с алюминием с замощенными на специальные посадочные места по всей его площади многослойными аэрогельными детекторами-ловушками 3 и 4. Эти аэрогельные детекторы ловушки выполнены в виде шестиугольных кювет с вогнутым под форму сферы днищем. Степень изгиба и форма зависят от конкретных размеров этих кювет. В кюветах 3 сенсорной структурой, реагирующей на ударные воздействия, является пьезоэлектрическая пленка PVDF, а в кюветах 4 такой структурой является датчик конденсаторного типа (структура металл-диэлектрик-металл).
На полюсе нижней полусферической оболочки закреплен винтовыми соединениями полый переходник 5 для подвода проводников от пленочных структур к блоку электроники для регистрации и обработки сигналов с них. Механически полусферы скреплены между собой при помощи закладных фланцев 6 и 7 соединенных винтами. Таким образом, достигается возможность разъединения полусфер при такой необходимости. Переходник 5 имеет два раздельных канала, в которых при электрическом монтаже будут проведены кабели с сигнальными проводами отдельно от верхней и нижней полусферы. На концах кабелей предусмотрены многоконтактные разъемы.
Корпус 9 каждой кюветы соединен винтами 10 с корпусом 8, в котором предусмотрены специальные глухие отверстия для крепления. В каждую кювету вмонтирован разъем типа «вилка» 11, к которому подсоединены проводники с пленочных структур в кювете, а в полусферическом корпусе в каждом посадочном месте предусмотрен ответный разъем типа «розетка» 12 выводящий проводники 13 из кюветы. Если кювета с PVDF-аэрогельной структурой, то проводников два, если датчик конденсаторного типа, то четыре. Выведенные из кюветы проводники образуют жгут 14, приклеенный акриловым клеем, например ВК-9, к внутренней оболочке детектора. Все жгуты от каждой кюветы проведены к полюсу своей полусферы и там они сплетены в один кабель, уходящий через отверстие в нижней полусфере к блоку электроники.
Сенсорно-аэрогельная структура кюветы 2 последовательно включает в себя наружный термо- и электроизоляционный аэрогельный экран демпфер 16 толщиной, например, 10 мм, внешнюю пленку PVDF толщиной несколько десятков микрометров 18, мерную базу 17 в виде калиброванной аэрогельной прокладки толщиной несколько единиц миллиметров, вторую внутреннюю аэрогельную пленку PVDF толщиной также несколько десятков микрометров, внутренний аэрогельный слой 21, который является ловушкой для попавших в детектор частиц. Все слои склеены межу собой по периметру каждой кюветы акриловым клеящим составом ВК-9. Проводники 22 проведенные внутри кюветы соединяют каждый из сенсорных PVDF-слоев с электрическим разъемом 11 типа «вилка» закрепленным в дне кюветы.
Сенсорно-аэрогельная структура кюветы 3 последовательно включает в себя сетки 15 для измерения заряда и оценке скорости частицы, наружный термо- и электроизоляционный аэрогельный экран демпфер 16, две электропроводящие обкладки 20 из, например, алюминия толщиной 20-50 нм напыленные на диэлектрический слой 19 из, например, полистирола толщиной в несколько десятков микрометров, а также внутренний аэрогельный слой 21 толщиной 10-50 мм. Аэрогельные слои скреплены с металлическими обкладками 20 и дном кюветы склеиванием акриловым клеем ВК-9. Сигнальные проводники 23 и 24 проведенные от сеток 15 и металлических обкладок 20 внутри кюветы соединены с электрическим разъемом 11 типа «вилка», закрепленным в дне кюветы.
Устройство работает следующим образом:
Перемещаясь по орбите космический аппарат с установленным на нем и постоянно выведенным наружу сферическим детектором в произвольный момент времени попадает под ударное воздействие случайного потока частиц или одиночной частицы.
Воздействие высокоскоростных пылевых или техногенных частиц на PVDF-аэрогельный детектор происходит следующим образом. Частица ударяется и проходит сквозь внешний аэрогельный экран-демпфер 16. Аэрогельные волокна плавятся под воздействием высоких температур возникших в результате удара и обволакивают частицу. Преодолев, таким образом, внешний аэрогельный слой, частица ударяется в первую со стороны подлета пленку PVDF 18, которая генерирует первый электрический импульс. Параметры этого импульса являются функциями скорости, количества движения и массы частицы которые фиксируются в соответствующем канале блока электроники. Далее частица пробивает калиброванный аэрогельный слой 17, играющий роль мерной базы и соударяется со второй пленкой PVDF 18, которая также генерирует электрический импульс при столкновении. После чего частица попадает во внутренний аэрогельный слой 21, в котором затормаживается и сохраняется до прибытия космического аппарата на Землю.
Средняя скорость определяется при преодолении частицей мерной базы L детектора и преодолении первой и второй (со стороны подлета) тонких эластичных поляризованных обкладок - пленок PVDF. При этом необходимо обеспечивать идентификацию одной и той же частицы при прохождении через 2 разные пленки PVDF. Это определяется, например, примерным равенством электрических импульсов AS1 и AS2, зафиксированных блоком электроники. Ударный импульс Р=mv частицы, определяется в момент прохождения ее сквозь первую и вторую тонкие пленки PVDF 18. При этом генерируются электрические импульсы, фиксируемые блоком электроники, с амплитудами AS1 и AS2 и длительностью переднего фронта импульсов, пропорциональными количеству движения частицы, т.е.

где Up - выходное напряжение с датчика, p - ударный импульс, Δt - длительность переднего фронта импульса с пьезодатчика, а, b, с, d - экспериментально определяемые в процессе калибровки устройства коэффициенты.
Воздействие высокоскоростных пылевых или техногенных частиц на МДМ-аэрогельный детектор происходит следующим образом.
При пролете частицы пыли 25 или техногенного мусора 26 сквозь сетки 15 посредством электростатической индукции измеряется заряд частиц (если частица его имеет), что позволяет получить необходимый набор исходных данных для независимого определения скорости и массы регистрируемой частицы. Далее частица ударяется и проходит сквозь внешний аэрогельный экран-демпфер 16, после чего пробивает МДМ-структуру, состоящую из диэлектрической прокладки 19 и напыленных на нее металлических токопроводящих слоев 20. После чего частица попадает во внутренний аэрогельный слой 21, в котором затормаживается и сохраняется до прибытия космического аппарата на Землю.
Принцип действия датчика конденсаторного типа основан на коротком замыкании и разряде конденсатора и появлении короткоживущей плазмы, возникающей при импульсном столкновении высокоскоростной частицы с электропроводящими обкладками. Данная сенсорная структура представляет собой полимерную пленку (например, полистирол) толщиной 2-20 мкм с электропроводящими напыленными из металла обкладками (например, из алюминия толщиной 30-50 нм).
Конденсатор разрушается в месте удара и по истечении времени взаимодействия восстанавливается с помощью источника постоянного тока. Площадь разрушенной верхней обкладки от одной частицы на 7-9 порядков меньше всей ее площади. Как указывалось выше, конденсатор может функционировать в режимах пробоя-восстановления, изменения электропроводности ударносжатого диэлектрика и запоминания ударного воздействия.
В общем случае зависимость амплитуды А сигнала МДМ-детектора от массы m и скорости v регистрируемой частицы описывается соотношением (2)

где α и β - константы, зависящие от свойств материала мишени и частицы и скорости удара.
Используемая в кюветах сборка - сотовая совокупность аэрогельных ловушек обеспечивает наибольшую прочность, эстетичность и экономичность этих ловушек в кювете, поскольку каждая аэрогельная ловушка, поперечное сечение которой имеет форму шестигранника, находится в контакте с другими аналогичными ловушками
Основные материалы, планирующиеся к использованию в конструкции детектора это бериллий, а точнее сплавы его с алюминием АБМ-1, АБМ-40, кварцевое стекло, базальтопластик, гелькоут (композиция на основе полиэфирной смолы).
Устройство решает проблему точного определения относительной скорости частицы как функции места попадания в детектор в случае сплошной структуры на всей поверхности полусферы и одного снимаемого с полусферы сигнала. Частицы могут двигаться с одинаковой абсолютной скоростью, но если одна частица попадет в лобовую часть детектора, а другая в кормовую часть под малым углом к направляющей, то сигналы с сенсорных структур покажут совершенно разные относительные скорости обеих частиц. Также, для каждой кюветы должна существовать своя отличная от других математическая модель взаимодействия, в которой номер каждой кюветы отражен через так называемый «коэффициент места удара». Он равен или близок, например, 2 для кювет в носовой части детектора, 1 - для боковых кювет, относительная скорость попадания в которые близка к абсолютной и <1 для кормовой части детектора.
Ударная поверхность должна быть несколько «утоплена» относительно края кюветы, для того, чтобы ограничить диапазон углов попадания частиц в кювету. Чем острее угол попадания частицы в структуру, тем больше погрешность определения скорости, поскольку при расчете подразумевается, что частица входит в аэрогель под углом 90°.
Технический результат - комплексная пространственная регистрация воздействия метеороидных и техногенных частиц, межзвездной и межпланетной пыли на космический аппарат, измерение их параметров на основе различных физических эффектов и неразрушающее улавливание частиц космической пыли и мусора для послеполетного изучения.
Реферат
Полезная модель относится к области космического приборостроения и может быть использована для обнаружения и измерения параметров космических частиц. Устройство для измерения параметров хаотических техногенных и метеоритных космических частиц содержит два полусферических детектора, соединенные кронштейнами с зажимами, установленными в гнезда закладных фланцев, с возможностью параллельного независимого функционирования, пленочные сенсорные структуры PVDF-пьезоактивные гибкие слои и тонкопленочные МДМ-структуры, напыленные и чередующиеся со слоями SiO-аэрогеля, являющиеся мерными базами для времяпролетного определения скорости частиц и ловушками для неразрушающего улавливания их, внешняя поверхность каждой из полусферических оболочек равномерно замощена шестиугольными кюветами с сенсорно-аэрогельной слоистой структурой, функционирующими одновременно и независимо, механически соединенными винтовыми соединениями с каждой полусферой и электрически соединенными с блоком электроники через посадочные места на поверхности каждой полусферы. Технический результат заключается в возможности определения скорости и направления прилета частицы относительно мишени при их соударении, а также фиксировании частиц и оценки их параметров (скорость, масса, импульс) после прохождения через сенсорные структуры в аэрогельные ловушки с целью их послеполетного исследования. 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Прибор для изучения параметров микрометеоритов и частиц космического мусора
Комментарии