Летательный аппарат для околоземных и космических полетов - RU2030339C1
Код документа: RU2030339C1
Чертежи


Описание
Изобретение относится к аэрокосмической технике, в частности к летательным аппаратам (ЛА), использующим в двигательной установке (ДУ) механизм электромагнитного взаимодействия бортового магнитного поля с околоземной или космической средой.
Наиболее близким техническим решением из числа известных является ЛА, содержащий корпус, установленную в корпусе подвижную массу, снабженную приводом вращения относительно корпуса, энергодвигательную систему, включающую источник питания и устройство создания пространственно-неоднородного магнитного поля с помощью установленных внутри корпуса магнитов, а также вспомогательные системы.
Известный ЛА осуществляет управляемый полет за счет реактивной тяги, возникающей в результате взаимодействия генерируемого в рабочей камере ДУ высокочастотного магнитного поля с частицами (молекулярными диполями) парамагнитной газообразной среды (без ионизации). Для создания высокочастотного магнитного поля используется вращающаяся система постоянных магнитов, а в качестве среды рассматриваются приземные слои, при этом атмосферный воздух является рабочим веществом ДУ.
Существенной проблемой при реализации аналогичного ЛА с заданным импульсом тяги является решение таких технических вопросов, как организация в рабочей камере высокочастотного магнитного поля и обеспечение запаса рабочего тела (сжатого воздуха) при полете в верхних слоях магнитосферы Земли или в космическом пространстве.
Целью изобретения является достижение технического результата, состоящего в создании эффективной двигательной системы и системы управления полетом на основании использования вращающегося тела с дискообразным корпусом, имеющего привод, преимущественно от гиромаховичной системы.
Данный технический результат достигается тем, что в известном ЛА, содержащем корпус, установленную в корпусе подвижную массу, снабженную приводом вращения относительно корпуса, энергодвига- тельную систему, включающую источник питания и устройство создания пространственно-неоднородного магнитного поля с помощью установленных внутри корпуса магнитов, а также вспомогательные системы, корпус выполнен в виде соосных жестко связанных верхнего и нижнего сбалансированных дисков с гладкой внешней поверхностью, установлены магниты в нижнем диске и объединены с корпусом как с магнитопроводом, обеспечивающим в плоскости наружной стенки диска волнистую структуру магнитного поля, а подвижная масса выполнена в виде маховика, связанного с корпусом посредством исполнительных элементов силовой многостепенной гиромаховичной системы и энергорекуперативного устройства.
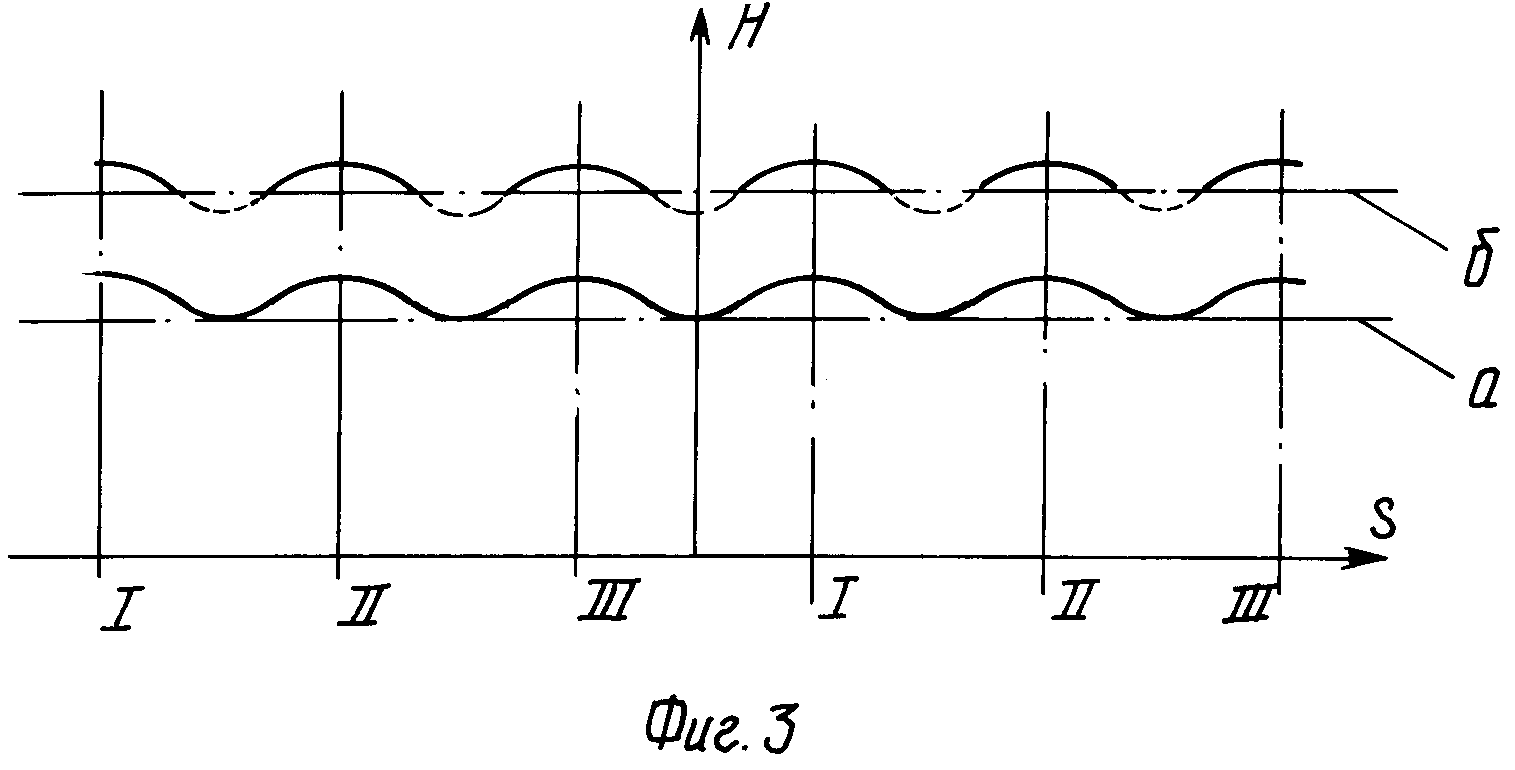
На фиг. 1 представлена конструктивная схема ЛА, вид в разрезе в одной из вертикальных плоскостей симметрии; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - развертка донной части корпуса ЛА с характеристикой напряженности магнитного поля ДУ вдоль окружностей "а" и "б" по фиг. 2; на фиг. 4 - модель опытного образца ЛА согласно изобретению.
ЛА (фиг. 1) содержит дискообразный корпус 1 играющий роль рабочего элемента энергодвигательной системы (в качестве магнитопровода) и одновременно являющийся цельной герметичной конструкцией. Корпус конструктивно объединен с магнитами (соленоидами) 2, также являющимися элементами энергодвигательной системы. Соосно с корпусом установлен супермаховик 3 в герметичной камере 4. Кинематическая связь супермаховика с корпусом осуществляется через магнитную муфту 5 сцепления рекуперативного маховика 6, а также посредством магнитной муфты сцепления 7, исключающей включение рекуперативного маховика.
Для управления наклоном супермаховика с камерой в двух взаимно перпендикулярных плоскостях служит подъемный механизм 8. Батареи постоянного электрического тока помещены в отсеке 9. Пункт управления системами и механизмами ЛА расположен в экранированной кабине 10. Для проникновения внутрь ЛА служит проем 11, оборудованный герметичным люком.
Для запуска аппарата предусмотрен оборудованный старт, представляющий собой опорную конструкцию для фиксации ЛА в исходном положении (как показано на фиг. 1) и создания пускового вращения корпуса ЛА. Пусковое вращение осуществляется с помощью бесконтактных электромагнитных двигателей, установленных на опорной конструкции старта по окружности относительно наружной кромки корпуса ЛА. В состав оборудования старта могут входить аппаратура для ионизации воздуха (ИВ) в районе старта, станция сжижения гелия (ССГ) с Т-4К для пусковой заправки системы криостатов ЛА, станция радиотелеметрической связи и управления ЛА.
Модель (см. фиг. 4) содержит корпус 12, инерционный диск 13, постоянные магниты 14 (5 шт.), сплав ЮНДК массой 48 г (1 шт.), подшипник 15 качения, стопорную гайку 16. Общая масса модели 720 г, основной материал - Ст.5.
Средства и условия проведения испытаний модели следующие: запуск модели ЛА был осуществлен в июле 1991 г. с крыши девятиэтажного дома при естественной ионизации воздуха. Пусковое вращение корпуса модели сообщалось от электродвигателя мощностью 200 Вт с пусковыми оборотами 2000-2400 об/мин.
ЛА работает следующим образом.
В соответствии с функциональным назначением перечисленного оборудования старта
последовательность операций по запуску ЛА следующая:
установка ЛА на старте с проверкой
баланса массы;
заправка системы криостатов жидким гелием;
проверка работы всех
бортовых систем и механизмов;
герметизация корпуса ЛА;
включение аппаратуры ИВ, время
работы 20 мин;
включение cиcтемы пуcкового вращения ЛА;
включение
двигательной системы ЛА и пуск.
Механизм электромагнитного взаимодействия вращающегося магнитного поля с частицами среды, в результате которого возникает подъемная сила известного ЛА. Для рассматриваемого ЛА этот механизм имеет отличие в структуре и параметрах взаимодействующего бортового магнитного поля.
Для понимания физики отмеченного процесса на фиг. 3
приведена развертка донной части нижнего диска корпуса по радиусам "а" и "б", на которых показана волнистая
структура напряженности магнитного поля. Волнистый характер бортового магнитного поля
объясняется герметическим расположением соленоидов в нижнем диске корпуса. При вращении ЛА волнистое поле
взаимодействует с частицами среды, обладающими магнитным моментом, в результате чего
наблюдается механизм взаимного "отталкивания" и возникновения нормальной составляющей силы к плоскости вращения ЛА,
которая в нижних слоях магнитосферы Земли может иметь следующий обобщенный вид:
F = (1,5-3)М˙g, где М - масса ЛА;
g - ускорение свободного падения.
Существенной особенностью отмеченного взаимодействия, предусмотренной в конструкции рассматриваемого ЛА, является обеспечение энергообмена между бортовым магнитным полем и частицами среды как в прямом, так и в обратном направлениях, т. е. магнитное поле ЛА (соответственно и корпус) получает ускорение вращения при определенных энергетических уровнях частиц. Эффективность данного энергообмена определяется такими показателями, как геометрические размеры (диаметр) ЛА, параметры бортового магнитного поля, начальные параметры движения ЛА (на определенном отрезке траектории), а также энергетический уровень и концентрация частиц плазменной среды. В зависимости от величины перечисленных параметров степень эффективности указанного энергообмена может быть выражена общим коэффициентом, принимающим значения 0,16-0,35 (рассчитан теоретически).
Управление
полетом ЛА осуществляется с помощью силовой гиромаховичной системы. Отдельные управляемые маневры ЛА выполняются
посредством следующих операций по управлению полетом
а) запуск ЛА со старта
- корпус получает пусковые обороты, включается муфта 6, маховик, имея силовую связь с корпусом, получает одинаковое
количество оборотов, включается питание системы соленоидов, происходит вертикальный
взлет;
б) изменение скорости полета - включается муфта 7, осуществляются отбор или отдача вращательной
энергии с маховика на корпус, соответственно изменяется интенсивность (направление)
внешнего взаимодействия корпусного магнитного поля со средой, а также скорость полета;
в) изменение
направления полетом - включается механизм 8, работающий автономно в одной из
перпендикулярных плоскостей, в результате этого возникает момент прецессии гиромаховичной системы, что вызывает изменение
положения вертикальной оси ЛА в пространстве, соответственно изменяется
направление полета;
г) посадка ЛА - поочередно работают механизм 8 и муфта 7 до полной остановки вращения корпуса
(после приземления ЛА).
Для обеспечения функционирования
гиромаховичной системы в общей системе ЛА необходимо соблюдение следующих конструктивных требований:
соосная
сбалансированность с корпусом ЛА,
блокировка максимальных оборотов
супермаховика (не превышающие предельно-допустимые),
допускаемое соотношение моментов инерции корпуса и
супермаховика определяется выражением М = 2-4 Мм.
Для экономического расходования электроэнергии батарей при питании соленоидов двигательной системы ЛА в конструкции соленоидов предусмотрено использование сверхпроводящего оборудования с устройством автономных криостатов, заправляемых жидким гелием (непосредственно перед стартом). После запуска и выхода ЛА в космическое пространство регулирование температурного режима соленоидов осуществляется с помощью пассивной системы терморегулирования.
Результаты испытаний модели следующие.
После раскручивания и отрыва модели от старта был зафиксирован (визуально) плавный подъем на высоту 1,2-1,5 м с кратковременным зависанием. Затем последовал ускоренный подъем модели вертикально вверх до полной потери ее видимости. Общее время наблюдаемого полета 10-15 с.
Хотя недостаток проведенных испытаний и заключался в непроведении измерений параметров модели и среды в связи с отсутствием технических средств, тем не менее качественная оценка динамики полета модели позволяет предположить, что подъемная сила ЛА рассмотренной конструкции имеет механизм (кроме описанного выше), связанный с магнитогравитационным эффектом, использующим центробежное поле корпуса или маховика.
Реферат
Использование: в аэрокосмической технике с применением в двигательных установках принципов летательных аппаратов (ЛА) эл. - магн. взаимодействия бортового магн. поля с околоземной или космической средой. Сущность изобретения: ЛА содержит дискообразный корпус 1, выполняющий функции магнитопровода и конструктивно объединенный с электромагнитами 2. В корпусе установлен супермаховик (СМ) 3, для управления двухстепенным наклоном СМ служит механизм 8. ЛА запускается со специально оборудованного старта; корпус 1 раскручивается при помощи, например, бесконтактных электродвигателей. Благодаря волнистой структуре магнитного поля в плоскости наружной стенки дискообразного корпуса 1 происходит взаимодействие этого поля с окружающей (например, влажной воздушной) средой, характер обтекания которой корпуса ЛА приводит к возникновению подъемной силы. Для управления движением ЛА используется СМ, механизм 8 наклона которого является исполнительным органом бортовой гиромаховичной системы ЛА. 4 ил.

Комментарии