Способ одноосной ориентации космического аппарата вытянутой формы - RU2764815C1
Код документа: RU2764815C1
Чертежи
Описание
Изобретение относится к космической технике и может быть использовано для ориентации космического аппарата (КА) при выполнении экспериментов и исследований.
Известен способ ориентации КА, включающий выставку осей КА и поддержание углового положения КА с помощью двигателей ориентации (Алексеев К.Б., Бебенин Г.Г. «Управление космическими летательными аппаратами», М.: Машиностроение, 1974).
Однако для использования данного способа необходимо расходовать рабочее тело, что приводит, кроме того, к загрязнению оптических поверхностей КА и вызывает микроускорения на борту КА.
Известен способ, включающий выставку оси КА, соответствующую минимальному моменту инерции, на центр Земли и орбитальное смещение КА (Беляев М.Ю. «Научные эксперименты на космических кораблях и орбитальных станциях», М.: Машиностроение, 1984). Данный способ используется для КА, имеющих вытянутую форму, т.е. когда момент инерции относительно продольной оси значительно меньше момента инерции относительно поперечных осей.
В этом случае обеспечивается гравитационная ориентация КА вытянутой формы, которая не требует для поддержания расхода рабочего тела и, следовательно, при этом не загрязняются оптические поверхности КА и не вызывают ускорения из-за работы двигателей управления ориентацией.
Однако, вследствие неточной выставки оси КА на центр Земли появляются угловые скорости вокруг всех осей КА. Наличие угловых скоростей вокруг поперечных осей КА приводит к отклонению продольной оси аппарата от направления к центру Земли, вследствие чего ухудшается точность гравитационной ориентации КА.
Известен способ одноосной ориентации КА вытянутой формы (патент РФ №2457159, приоритет от 30.08.2010, МПК (2006.01) B64G 1/34), включающий выставку оси КА, соответствующей минимальному моменту инерции, на центр Земли и орбитальное смещение КА, при этом после выставки оси КА на центр Земли и орбитального смещения КА производят закрутку КА вокруг выставленной на центр Земли оси КА до требуемого момента с угловой скоростью
Данный способ позволяет повысить точность одноосной ориентации конкретно рассмотренного типа КА и, тем самым, снизить также микроперегрузки на КА, возникающие при раскачке и переходе КА в режим неуправляемого вращения. В общем случае вращение КА с указанной скоростью не является устойчивым для всех типов КА вытянутой формы - в общем случае со временем отклонение продольной оси КА от направления к центру Земли становится все более существенным, что приводит к «кувырканию» КА и разрушению гравитационной ориентации. Это, в том числе, ограничивает возможности проведения экспериментов, требующих наведения научной аппаратуры на Землю и/или низкого уровня микроускорений.
Наиболее близким к предлагаемому является способ управления ориентацией космического аппарата с неподвижными панелями солнечных батарей при выполнении экспериментов (патент РФ №2562904, приоритет от 06.02.2014, МПК (2006.01) B64G 1/44 - прототип), включающий гравитационную ориентацию КА продольной осью вдоль местной вертикали и закрутку вокруг его продольной оси, соответствующей минимальному моменту инерции, дополнительно определяют угол β между направлением на Солнце и плоскостью орбиты с положительным направлением отсчета угла по вектору угловой скорости орбитального движения КА, определяют высоту орбиты, по которой определяют предложенным образом фиксируемое значение угла между направлением на Солнце и плоскостью орбиты β*, а КА закручивают вокруг продольной оси с задаваемой угловой скоростью, значение которой определяется в зависимости от значения угла β (а именно, в зависимости от выполнения условий, согласно которым угол β менее - β*, в диапазонах (-β*, 0), (0, β*) или более β*), при этом в момент прохождения противосолнечной точки витка достигается задаваемое положение в пространстве нормали к рабочей поверхности солнечных батарей (а именно, нормаль к активной поверхности СБ составляет задаваемый угол с вектором угловой скорости орбитального движения КА).
Способ - прототип обеспечивает максимизацию интегральной освещенности рабочей поверхности СБ за виток в режиме закрутки КА вокруг продольной оси с угловой скоростью 3⋅ωO при поддержании одноосной гравитационной ориентации КА.
К недостаткам способа-прототипа относится, в частности, то, что его действия строго учитывают условия и особенности поддержания одноосной гравитационной ориентации КА и достигаемый при этом положительный эффект (максимизация интегральной освещенности рабочей поверхности СБ за виток) не сохраняется в условиях поддержания одноосной ориентации КА относительно инерциального пространства.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение необходимого энергоприхода от СБ КА при выполнении экспериментов и исследований в условиях вращательного движения КА.
Технический результат предлагаемого изобретения заключается в повышении прихода электроэнергии от СБ КА в условиях поддержания одноосной инерциальной ориентации КА в режиме закрутки КА вокруг его продольной оси.
Технический результат достигается тем, что в способе одноосной ориентации космического аппарата вытянутой формы, включающий определение высоты орбиты космического аппарата, определение угла β между направлением на Солнце и плоскостью орбиты космического аппарата, разворот космического аппарата до совмещения продольной оси космического аппарата с плоскостью орбиты и достижении задаваемого положения в пространстве нормали к рабочей поверхности солнечных батарей с последующей закруткой космического аппарата вокруг его продольной оси, в отличии от прототипа дополнительно по определенной высоте орбиты космического аппарата определяют длительность ΔT теневой части витка орбиты, к моменту времени t0 выполнения закрутки дополнительно разворачивают космический аппарат до совмещения продольной оси космического аппарата с направлением, перпендикулярным направлению на Солнце, при одновременном достижении углом α между нормалью к рабочей поверхности солнечных батарей, ориентированной перпендикулярно продольной оси космического аппарата, и проекцией Sp направления на Солнце на плоскость орбиты задаваемого значения α0, а закрутку космического аппарата выполняют с угловой скоростью

Т - период обращения космического аппарата;
m - задаваемое количество витков поддержания одноосной ориентации космического аппарата в режиме закрутки;
n - целое число,

причем значение α0 определяют из условия равенства углов α и β в момент выхода космического аппарата на первую световую часть орбиты из упомянутого количества витков поддержания одноосной ориентации космического аппарата в режиме закрутки при совпадающих положительных направлениях отсчета углов α и β и угловой скорости закрутки космического аппарата.
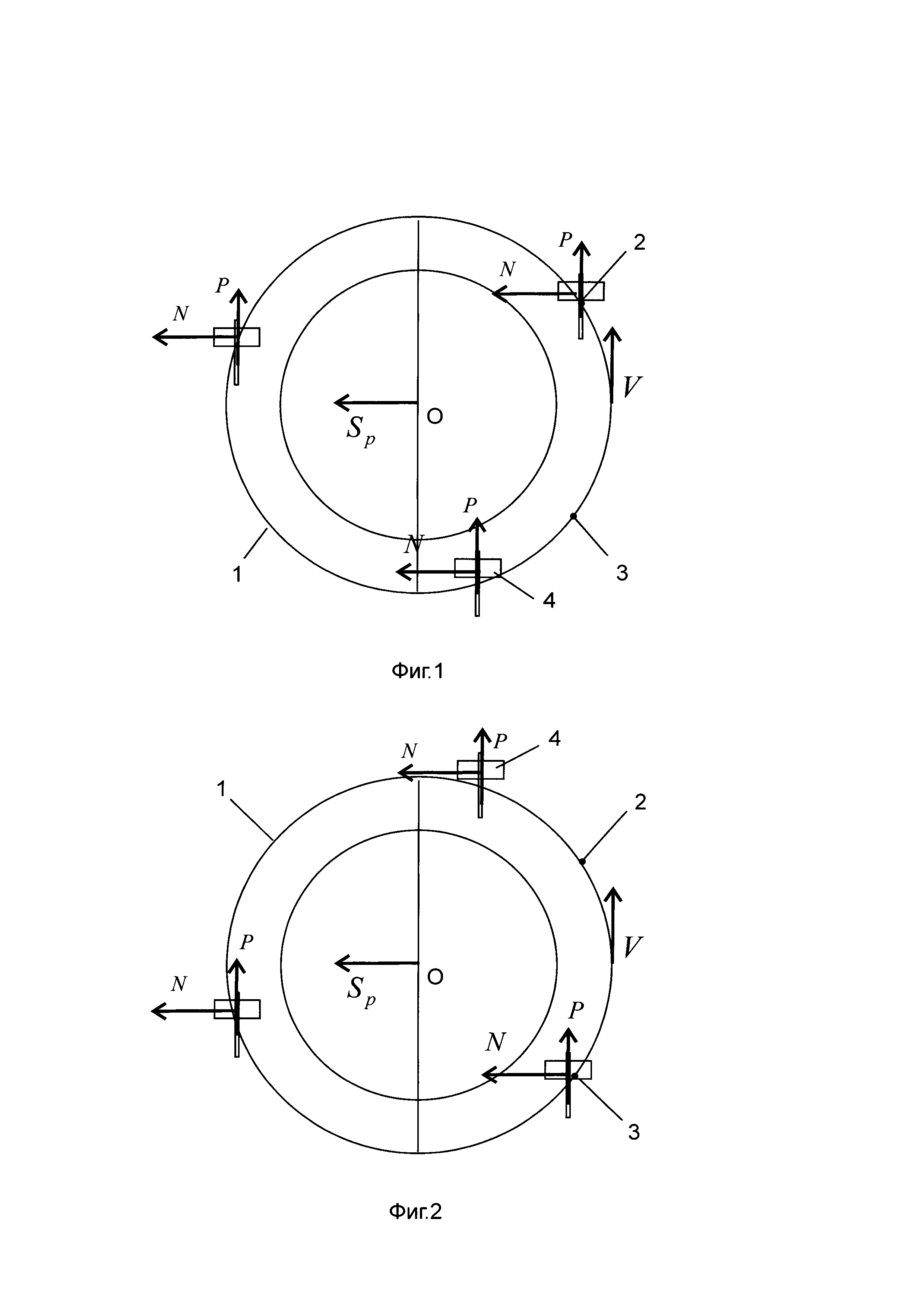
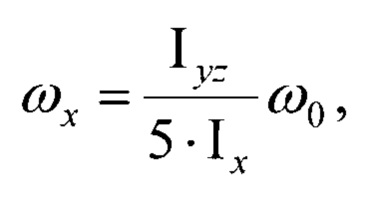
Суть предлагаемого изобретения поясняется на фиг. 1 и 2.
На фиг. 1 и 2 представлены схемы ориентации СБ КА при реализации предложенного способа поддержания одноосной ориентации КА с предлагаемыми параметрами закрутки КА вокруг его продольной оси.
На фиг. 1 и 2 введены обозначения:
1 - орбита КА;
2 - точка выхода КА на световую часть витка;
3 - точка входа КА на теневую часть витка;
4 - рабочая поверхность СБ;
О - центр Земли и орбиты;
Sp - проекция направления на Солнце на плоскость орбиты;
V - вектор скорости КА;
N - нормаль к рабочей поверхности СБ.
Р - положительное направление угловой скорости закрутки КА вокруг его продольной оси.
Поясним суть изобретения.
В предлагаемом способе рассматриваем вытянутый вдоль продольной оси КА, у которого нормаль к рабочей поверхности СБ перпендикулярна указанной продольной оси КА, движущийся по орбите, близкой к круговой. Считаем, например, что КА имеет специфический центральный эллипсоид инерции: большая и средняя полуоси этого эллипсоида мало отличаются друг от друга и существенно больше (в три и более раз) малой полуоси.
При описании способа положительное направление отсчета углов α и β принимается от проекции Sp направления на Солнце на плоскость орбиты по вектору угловой скорости орбитального движения КА (направление вектора угловой скорости орбитального движения КА совпадает с направлением нормали к плоскости орбиты КА).
Согласно предлагаемому способу определяют угол β между направлением на Солнце и плоскостью орбиты КА с положительным направлением отсчета угла по вектору угловой скорости орбитального движения КА.
Определяют высоту орбиты КА.
По высоте орбиты КА определяют период Т обращения КА по орбите.
По высоте орбиты КА и углу β между направлением на Солнце и плоскостью орбиты КА определяют среднюю длительность ΔT теневой части витков орбиты на интервале рассматриваемого задаваемого (требуемого) количества витков поддержания одноосной ориентации КА в режиме закрутки (принимаем, что в течение рассматриваемого количества витков поддержания одноосной ориентации КА в режиме закрутки значение ΔT меняется не значительно).
Определяют и контролируют изменение угла α между нормалью к рабочей поверхности СБ и проекцией Sp направления на Солнце на плоскость орбиты с положительным направлением отсчета угла по вектору угловой скорости орбитального движения КА.
К заданному моменту времени t0 разворачивают КА до совмещения продольной оси КА с направлением, расположенным в плоскости орбиты и перпендикулярным направлению на Солнце, при одновременном достижении углом α между нормалью к рабочей поверхности СБ и проекцией Sp направления на Солнце на плоскость орбиты задаваемого значения α0.
Задаваемое значение α0 определяют из условия, что в момент

где ω1 - расчетное значение угловой скорости закрутки КА вокруг его продольной оси,

m - задаваемое (требуемое) количество витков поддержания одноосной ориентации КА в режиме закрутки;
n - целое число, удовлетворяющее условию

Здесь принимается, что положительное направление Р угловой скорости закрутки КА вокруг его продольной оси направлено по векторному произведению вектора направления на Солнце S и вектора угловой скорости орбитального движения КА ω0 (направленного по нормали к плоскости орбиты КА Norb)

таким образом обеспечивается единое положительное направлении отсчета угловой скорости закрутки КА и углов α и β.
Соотношение (1) получено с условием, что определение значений углов α и β выполняется при совпадающих положительных направлениях угловой скорости закрутки КА и отсчета углов α и β (отсчет углов осуществляется от направления Sp).
В момент времени t0 выполняют закрутку КА в вокруг его продольной оси с расчетной угловой скоростью ω1, значение которой определяется формулой (2) с учетом соотношения (3).
Соотношение (3) соответствует условию

где ωO - угловая скорость орбитального движения КА.
Предложенное значение угловой скорости закрутки КА ω1, определяемое формулой (2) с учетом соотношения (3) и, как следствие, удовлетворяющее ограничению (4), удовлетворяет условию обеспечения необходимой степени устойчивости поддержания инерциальной одноосной ориентации КА в режиме закрутки такого типа КА как, например, транспортный грузовой корабль (ТГК) «Прогресс».
Вместе с тем, условие (4) обеспечивает нахождение на каждом витке из задаваемого (требуемого) количества витков поддержания одноосной ориентации КА в режиме закрутки не менее трех моментов, когда угол α равен углу β, что соответствует (для рассматриваемого класса КА) ориентации нормали к рабочей поверхности СБ в направлении на Солнце - т.е. условию максимального освещения рабочей поверхности СБ Солнцем.
Определение расчетной угловой скорости закрутки ω1 в предлагаемом способе по соотношениям (2)÷(3) обеспечивает реализацию в течение задаваемого (требуемого) количества витков поддержания одноосной ориентации КА в режиме закрутки максимального числа таких моментов (моментов. когда угол α равен углу β и рабочая поверхность СБ максимально освещена Солнцем).
На фиг. 1 и 2 для иллюстрации представлены положения КА на орбите и схемы ориентации СБ КА при реализации предложенного способа поддержания одноосной ориентации КА с предлагаемыми параметрами закрутки КА вокруг его продольной оси на первом (фиг. 1) и последнем (фиг. 2) из задаваемого количества витков поддержания одноосной ориентации КА в режиме закрутки.
Опишем технический эффект предлагаемого изобретения.
Предлагаемое изобретение повышает приход электроэнергии от СБ КА при выполнении экспериментов и исследований в условиях поддержания одноосной инерциальной ориентации КА в режиме закрутки КА вокруг его продольной оси путем обеспечения максимизации суммарной освещенности активной поверхности СБ на интервале задаваемого (требуемого) количества витков поддержания одноосной ориентации КА в режиме закрутки.
Предложенные параметры закрутки КА, удовлетворяя условию обеспечения необходимой степени устойчивости поддержания гравитационной ориентации КА, обеспечивают такое соотношение значений угловой скорости закрутки, периода обращения КА по орбите, длительности теневого участка орбиты и задаваемого (требуемого) количества витков поддержания одноосной ориентации КА в режиме закрутки, при котором обеспечивается максимальная суммарная освещенность активной поверхности СБ на рассматриваемом интервале полета КА.
В настоящее время технически все готово для реализации предложенного способа. Для реализации разворотов, закрутки и вычислений могут использоваться штатные средства системы управления КА - система управления движением и навигацией, включая систему автономной навигации, солнечные датчики, датчики угловой скорости, двигатели ориентации, бортовой вычислитель и т.д.
Реферат
Изобретение относится к управлению ориентацией космического аппарата (КА) вытянутой формы с солнечными батареями (СБ). Способ включает определение высоты орбиты КА и длительности ΔT теневой части витка орбиты, угла β между направлением на Солнце и плоскостью орбиты КА, разворот КА до совмещения его продольной оси с плоскостью орбиты и закрутку КА вокруг его продольной оси. К моменту закрутки совмещают продольную ось КА с направлением, перпендикулярным направлению на Солнце, при достижении углом α между нормалью к рабочей поверхности СБ, перпендикулярной продольной оси КА, и проекцией направления на Солнце на плоскость орбиты значения α0, задаваемого условием α=β в момент выхода КА на первую из числа витков поддержания одноосной ориентации КА световую часть орбиты. Закрутку КА выполняют с угловой скоростью ω1>3ω (ω - орбитальная угловая скорость). Технический результат состоит в повышении энергоотдачи СБ при поддержании одноосной инерциальной ориентации КА. 2 ил.
Формула

Комментарии