Система и способ дозаправки спутников - RU2607912C2
Код документа: RU2607912C2
Чертежи








Описание
ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ НА ПАТЕНТ США
Настоящая заявка на патент относится к предварительной заявке на патент США №60/905,837, поданной 9 марта 2007, озаглавленной СИСТЕМА И СПОСОБ ДОЗАПРАВКИ РОБОТИЗИРОВАННЫХ СПУТНИКОВ, поданной на английском языке, включенной в этот документ полностью посредством ссылки.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе для дозаправки спутников и способу дозаправки спутников.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Многие геосинхронные орбитальные спутники связи, находящиеся в эксплуатации в настоящее время, имеют конечное количество топлива и выполнены без возможности дозаправки. Принцип конструкции рассчитывался на замену спутников после того, как они исчерпали бортовой запас топлива. Принимая во внимание расходы на замену спутников, было бы очень выгодно иметь возможность заправлять топливом спутники связи, которые либо приближаются к концу срока эксплуатации, либо испытали ранний отказ двигательной системы, удлиняя, таким образом, их срок эксплуатации на несколько лет.
Во многих случаях в конце 10-15-летнего срока эксплуатации спутника все его подсистемы все еще функциональны, и только истощение тщательно планируемого запаса топлива ведет к изъятию спутника из эксплуатации. Основываясь на текущей экономической модели, возможность дозаправки 10-12 из этих спутников, чей срок эксплуатации подошел к концу, в одной миссии, увеличила бы их полезный срок службы на 3-5 лет и, таким образом, отложила бы необходимость тратить 150-250 млн. долл. США на запуск другого спутника на замену. Некоторые спутники испытывают первичный отказ двигательной системы вскоре после того, как они запущены. В этих случаях должна быть списана вся балансовая стоимость, и исполнителю должна быть заплачена компенсация космическим страховщиком. Спутник становится активом космического страховщика и со временем должен быть утилизирован на орбите захоронения. Если один из этих активов может быть дозаправлен, что удлинит его срок эксплуатации на 5-10 лет, большая часть стоимости космического корабля может быть восстановлена.
Ключевая техническая трудность заключается в том, что эти спутники не были разработаны для роботизированного обслуживания, и не является общепринятым, что такие миссии технически возможны. Конкретно, большинство спутников выполнены с клапанами заправки и слива топлива, которые были предназначены для однократной заправки перед запуском и не предназначены для того, чтобы их открывали или ими управляли снова. Таким образом, удаленный доступ к этим клапанам заправки и слива топлива представляет несколько основных проблем и включал бы несколько операций, каждую из которых трудно выполнить с помощью робота, в том числе: разрезание и удаление тепловых защитных покрытий, удаление нескольких контровочных проволок, обернутых вручную вокруг клапанов, распутывание и удаление внешних и внутренних крышек клапанов, соединение заправочного трубопровода для топлива с носиком клапана, механическое приведение в действие клапана и, когда дозаправка закончена, замену внутренней крышки клапана.
Орбитальное обслуживание стало предметом большого количества исследований за последние тридцать лет. Идея сохранения космических активов вместо их ликвидации и замены привлекла множество идей и программ. Пока концепция была применена только в пилотируемой космической программе, где некоторый успех может быть приписан миссиям ремонта Космического телескопа Хаббла, спасательным миссиям Palapa-B2 и Westar и сборке и обслуживанию Международной Космической Станции.
Роботизированный захват и обслуживание существующих геостационарных космических кораблей никогда не демонстрировались. За последнее десятилетие созрели некоторые из ключевых технологий, необходимых для орбитального обслуживания. Они включают автономное сближение (ETS-VII (1998), XSS-11 (2005), DART (2006), Orbital Express (2007), автономную стыковку (ETS-VII, Soyuz, Орбитальный Экспресс), наземное роботизированное дистанционное управление (ETS-VII, SSRMS (2005), Orbital Express), и орбитальную транспортировку текучей среды (ISS). Тем не менее, существует разрыв в технологиях, требуемых для обслуживания или дозаправки неподготовленного спутника на орбите. Неподготовленный спутник определяется здесь как космический корабль, который не был разработан с возможностью управления или восстановления роботизированной системой. Некоторые достижения были сделаны в технологиях, требуемых для стыковки с неподготовленным спутником, и DLR (Германский Космический Центр) и MDA продемонстрировали посредством различных научно-исследовательских усилий, что стыковка со спутником связи GEO через двигатель космического корабля, включаемый в апогее, является осуществимым вариантом стыковки.
До настоящего времени не было известно технологий, способных решить проблему доступа к топливной системе неподготовленного спутника с целью восполнения топлива для удержания стации на орбите. Большинство спутников, находящихся в настоящий момент на орбите, не было выполнено с идеей орбитальной дозаправки, причем доступ к топливной системе разработан так, чтобы быть доступным человеком на земле перед запуском. Технологии, требуемые для получения доступа к топливной системе целевого космического корабля в целях дозаправки, все еще имеют очень низкий уровень готовности технологии, и в целом считаются главным препятствием успешной миссии обслуживания.
Патентная публикация США №2006/0151671 (Kosmos) раскрывает приводной рычаг, установленный на космическом корабле, выполненном как манипулятор обслуживания для использования в пределах отсека для технического обслуживания космических кораблей, и содержит приводной рычаг, соединенный с основанием посредством гибких соединительных лент.
Патентная публикация США №2006/0151671 раскрывает архитектуру передачи данных, в которой передача данных между наземной станцией и обслуживающим спутником выполняется через систему передачи данных линий связи обслуживаемого спутника. Также раскрыта общая архитектура обслуживания, в которой целевые спутники захватываются и возвращаются к обслуживающему космическому кораблю. Предполагается, что в пределах этого обслуживающего космического корабля могли бы быть проведены любые требуемые операции по обслуживанию.
Публикация «Обслуживание на орбите «Системой обслуживания на орбите HERMES, Надежное планирование политики», К. Космос, Американский Институт Аэронавтики и Астронавтики, материалы конференции SpaceOps 2006», стр.1-6, 26 апреля 2006, раскрывает архитектуру дозаправки спутника, которая требует, чтобы каждый спутник, который должен быть обслужен, имел стандартное быстроразъемное (QD) соединение, присоединенное к его клапану обслуживания перед запуском. Предварительная разработка инструмента доступа к клапану, используемого для того, чтобы получить доступ к этому клапану, также представлена.
Поэтому, было бы очень выгодно иметь систему дозаправки спутников для контролируемой с Земли дозаправки неподготовленных спутников.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает способ, систему и устройство для роботизированной дозаправки спутников. Система может включать специализированный заправочный спутник, запущенный непосредственно либо с Земли, либо, как альтернатива, перевезенный транзитом от другого большего космического корабля-носителя или космической станции, в которой заправочный спутник запускается в космос для заправочной миссии, или он может храниться на космической станции до востребования для следующей необходимой операции дозаправки. Система содержит позиционирующий механизм, такой как механизированная рука-манипулятор, подходящие инструменты, которые могут быть прикреплены к захватному устройству механизированной руки-манипулятора, требуемой для доступа, открытия и закрытия заправочного клапана(ов) на обслуживаемом спутнике, станции хранения и извлечения на приспособлении для хранения инструментов, в котором хранятся инструменты и различные крышки заправочных клапанов.
В одном варианте выполнения система управляется дистанционно находящимся на удалении оператором, например, находящимся на Земле или на космической станции. Фото или видеокамеры в системе дозаправки сфокусированы на механизированной руке-манипуляторе и концевом исполнительном элементе, причем оператор использует переданные изображения для направления и управления процедурой дозаправки.
В другом варианте выполнения система дозаправки может быть оборудована функцией искусственного зрения, которая используется, чтобы запечатлеть рабочий участок около клапана заправки-слива, обеспечивая оператору относительные положения между обслуживающей рукой-манипулятором/комбинацией инструментов с клапанами. Система дозаправки затем управляется в контролируемой автономной манере, используя скорректированную модель рабочего места, полученную из зарегистрированной информации функции искусственного зрения. Раскрытая здесь система может также быть использована для заправки впервые запускаемых спутников до запуска, устраняя, таким образом, или по меньшей мере уменьшая риск воздействия токсичного топлива на специалиста по заправке в случае аварии.
В одном аспекте настоящего изобретения предусмотрена система для заправки неподготовленного или частично подготовленного обслуживаемого спутника, содержащая:
средство транспортировки текучей среды для транспортировки топлива от бака для хранения топлива к топливному баку на обслуживаемом спутнике и/или для транспортировки окислителя от бака для хранения окислителя к баку для окислителя на обслуживаемом спутнике;
инструментальное средство для соединения заправочного трубопровода для топлива с топливным отверстием на баке для хранения топлива и отсоединения указанного заправочного трубопровода, и/или для присоединения заправочного трубопровода для окислителя к отверстию для окислителя на баке для окислителя, и отсоединения указанного заправочного трубопровода для окислителя;
сенсорное средство для определения относительного смещения между инструментальным средством и отверстиями для топлива и окислителя на обслуживаемом спутнике;
средство позиционирования, соединенное с указанным инструментальным средством для размещения указанного инструментального средства относительно указанных отверстий для топлива и окислителя на указанном обслуживаемом спутнике для соединения и отсоединения указанных заправочных трубопроводов для топлива и окислителя с указанными отверстиями для топлива и окислителя; и
средство управления, находящееся в сообщении с указанным сенсорным средством, средством позиционирования и инструментальным средством для управления работой средства позиционирования и инструментального средства, основываясь на данных обратной связи от сенсорного средства.
Настоящее изобретение предлагает инструмент для заправки неподготовленного или частично подготовленного обслуживаемого спутника, содержащий топливный бак, заправочный клапан для топлива, и исполнительный кулачок клапана на указанном заправочном клапане для топлива, используемый для открытия и закрытия указанного заправочного клапана для топлива, и крышку доступа клапана на указанном клапане доступа, и, при желании, содержит отверстие для окислителя на баке для окислителя, содержащем заправочный клапан для окислителя и исполнительный кулачок клапана на указанном заправочном клапане для окислителя, используемый для открытия и закрытия указанного заправочного клапана для окислителя, и крышку доступа клапана на указанном заправочном клапане для окислителя, причем инструмент также содержит:
взаимозаменяемые гнездовые модули, первый гнездовой модуль для удаления и возвращения на место указанной крышки доступа клапана на указанном заправочном клапане для топлива, второй гнездовой модуль, соединенный с указанным заправочным трубопроводом для топлива для соединения указанного заправочного трубопровода с указанным топливным баком, третий гнездовой модуль для соединения указанной крышки доступа клапана на указанном заправочном клапане для окислителя на баке для окислителя, и четвертый гнездовой модуль для захвата указанного заправочного клапана для окислителя для соединения указанного заправочного клапана для окислителя с указанным баком для окислителя,
несущую конструкцию, механизм держателя гнездового модуля, установленный на указанной несущей конструкции, выполненной так, чтобы принимать указанные взаимозаменяемые гнездовые модули;
механизм привода гнезда, установленный на указанной несущей конструкции для приведения в действие указанных первого, второго, третьего и четвертого гнездовых модулей, когда они расположены в указанном механизме держателя гнездовых модулей;
зажимное устройство, установленное на указанной несущей конструкции для закрепления клапанного инструмента в области реакции на заправочном клапане для топлива и заправочном клапане для окислителя, причем указанное зажимное устройство выполнено так, чтобы локализовать вращающий момент, вырабатываемый указанным клапанным инструментом для того, чтобы гарантировать, что любые реактивные моменты от гнездового приводного устройства реагируют локально для предотвращения повреждения клапана; и
исполнительный клапанный механизм, установленный на указанной несущей конструкции, для захвата и приведения в действие указанного исполнительного кулачка клапана на заправочном клапане для топлива и заправочном клапане для окислителя.
Предложен способ роботизированной дозаправки спутника, включающий: подачу механизированной руке-манипулятору команды на осуществление доступа к заправочному клапану для топлива на топливном баке на указанном спутнике посредством следующих шагов:
передачи визуальных изображений области спутника, содержащей заправочный клапан для топлива, к дистанционному манипулятору, отдаленному от спутника, используя визуальные изображения для направления дистанционного манипулятора для подачи команд механизированной руке-манипулятору на следующих этапах:
прикрепление инструмента для разрезания теплового защитного покрытия на концевом исполнительном элементе, зацепляя указанный инструмент для разрезания теплового защитного покрытия, окружающего указанный заправочный клапан для топлива, и прорезание отверстия для доступа в указанном тепловом защитном покрытии,
удаление инструмента для разрезания теплового защитного покрытия и закрепление инструмента для удаления крышки на указанном концевом исполнительном элементе и зацепление указанного инструмента для удаления крышки с внешней крышкой заправочного клапана для топлива, и удаление и хранение указанной внешней крышки,
удаление инструмента для удаления крышки и закрепление клапанного инструмента на указанном концевом исполнительном элементе, прикрепление клапанного инструмента удаления и замены В-гайки к указанному клапанному инструменту и зацепление указанного клапанного инструмента с указанным заправочным клапаном для топлива, и удаление и хранение B-гайки клапана, расположенной на указанном заправочном клапане для топлива,
удаление инструмента для удаления и замены B-гайки клапана и закрепление муфты заправочного трубопровода на указанном клапанном инструменте, прикрепление муфты заправочного трубопровода к указанному заправочному клапану для топлива, открытие указанного заправочного клапана для топлива и дозаправка указанного топливного бака, закрытие указанного топливного клапана, отделение указанной муфты заправочного трубопровода от указанного заправочного клапана для топлива, удаление и хранение указанной муфты заправочного трубопровода от указанного концевого исполнительного элемента, закрепление указанного инструмента удаления и замены гайки клапана на указанном клапанном инструменте и извлечение и установка указанной B-гайки клапана на указанном клапане заправочного трубопровода.
Устройство дозаправки содержит различные элементы, в том числе различные инструменты, необходимые для доступа и дозаправки спутника, роботизированное установочное устройство, выполненное с возможностью крепления к нему различных инструментов, и приспособление для инструментов, в котором хранятся различные инструменты. Система содержит устройство дозаправки, выполненное как единое целое с заправочным спутником, к которому оно присоединено, включая фото или видеокамеры и систему передачи данных для передачи изображений от фото или видеокамер и команд от оператора. Существующие спутники могут быть модифицированы так, чтобы содержать механизированную руку-манипулятор, приспособление для инструментов, инструменты, фото или видеокамеры и систему передачи данных для дозаправки.
Дальнейшее понимание функциональных и преимущественных аспектов изобретения может быть осуществлено посредством ссылки на последующее подробное описание и приложенные чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение станет более полно понятным из следующего подробного описания в совокупности с приложенными чертежами, которые составляют часть данной заявки и на которых:
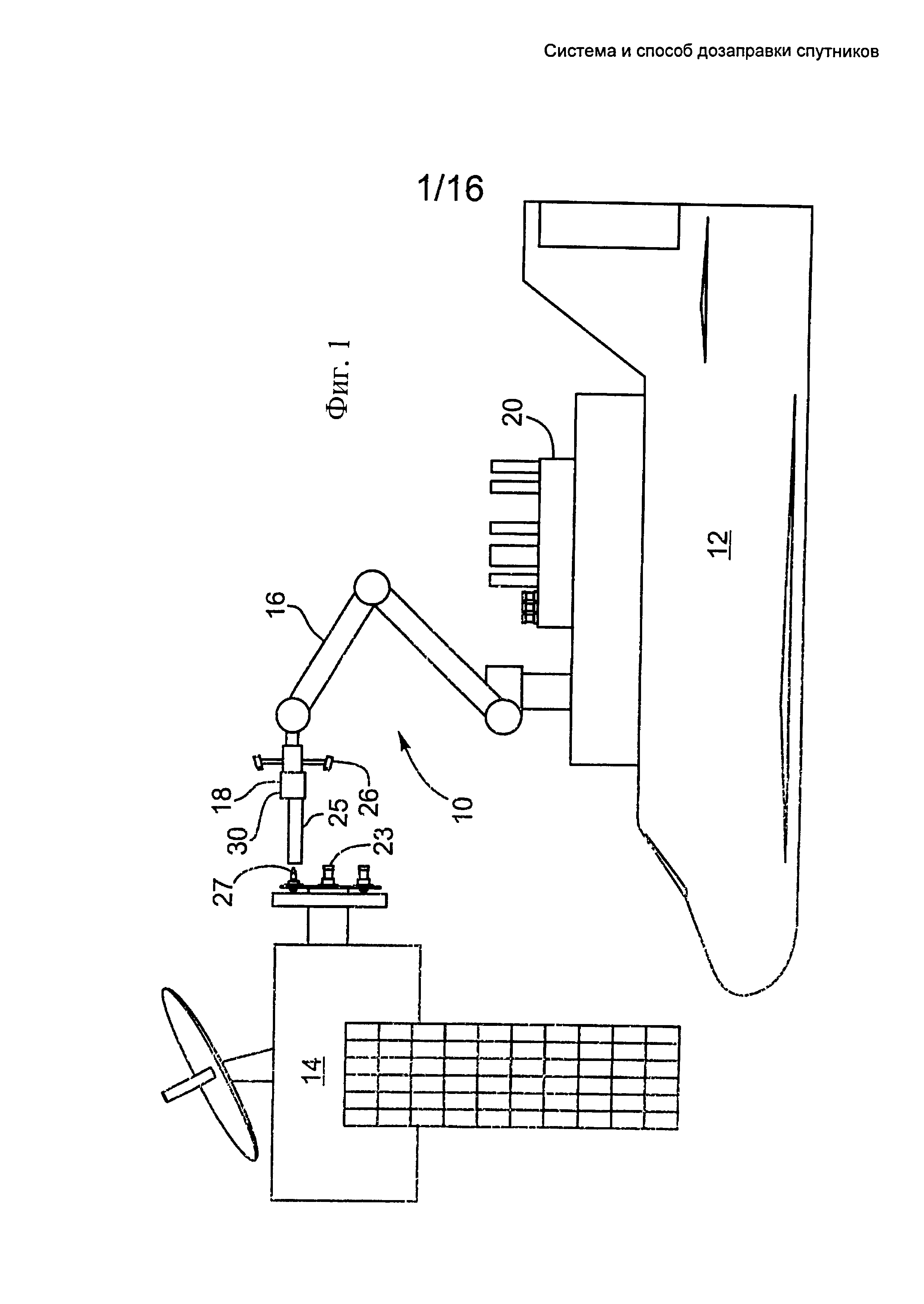
Фиг.1 изображает роботизированное устройство дозаправки спутников, предназначенное для дозаправки спутников, установленных на обслуживающем космическом корабле и дозаправляющих спутник;
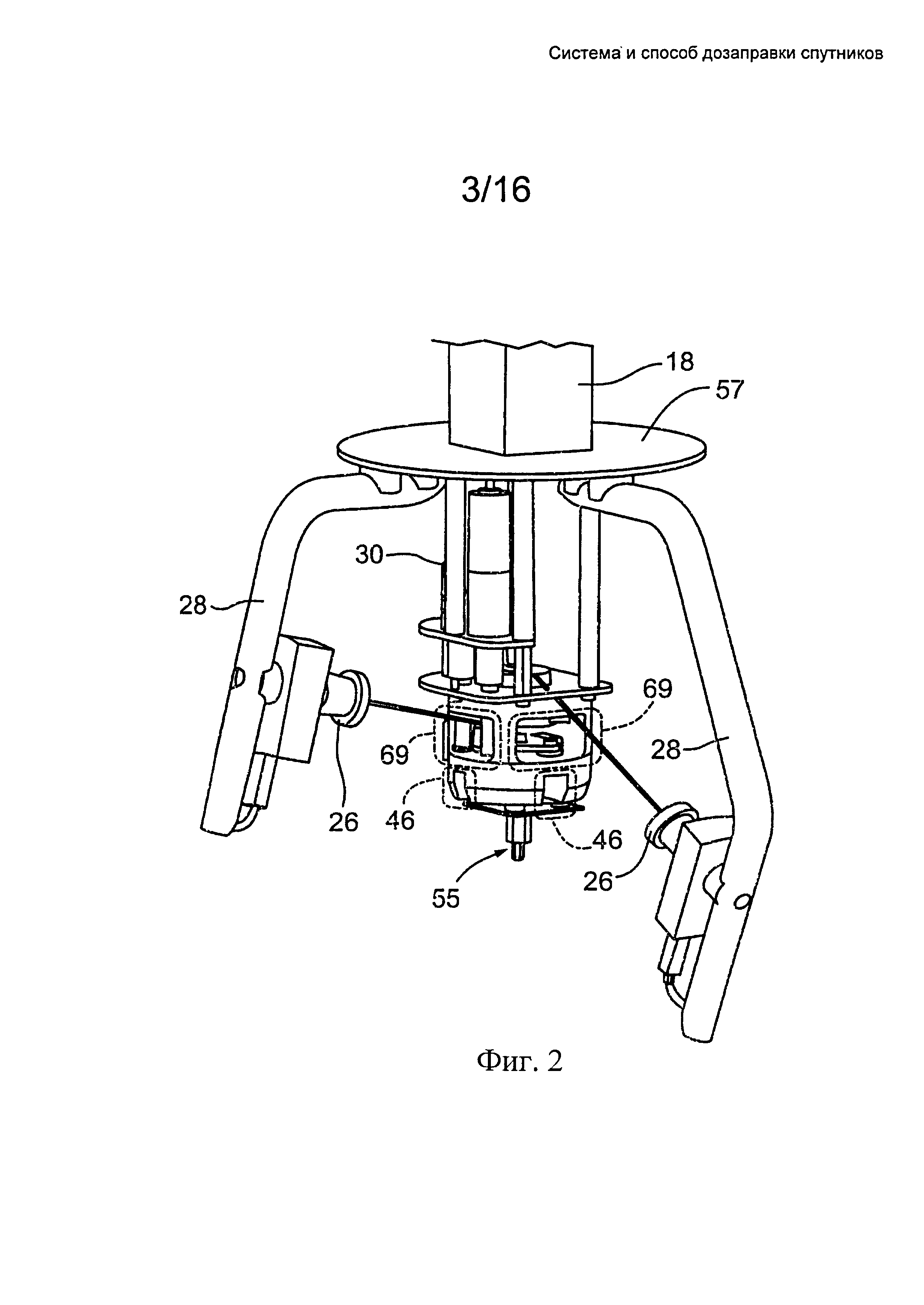
Фиг.2 изображает вид в аксонометрии устройства, изображенного на Фиг.1, с двумя фото или видеокамерами, установленными на балках, сфокусированными на инструменте дозаправки для визуальной помощи операторам на Земле, подающим команды роботу в процессе дозаправки;
Фиг.3 изображает вид в аксонометрии частично собранного клапанного инструмента, образующего часть системы дозаправки в соответствии с настоящим изобретением;
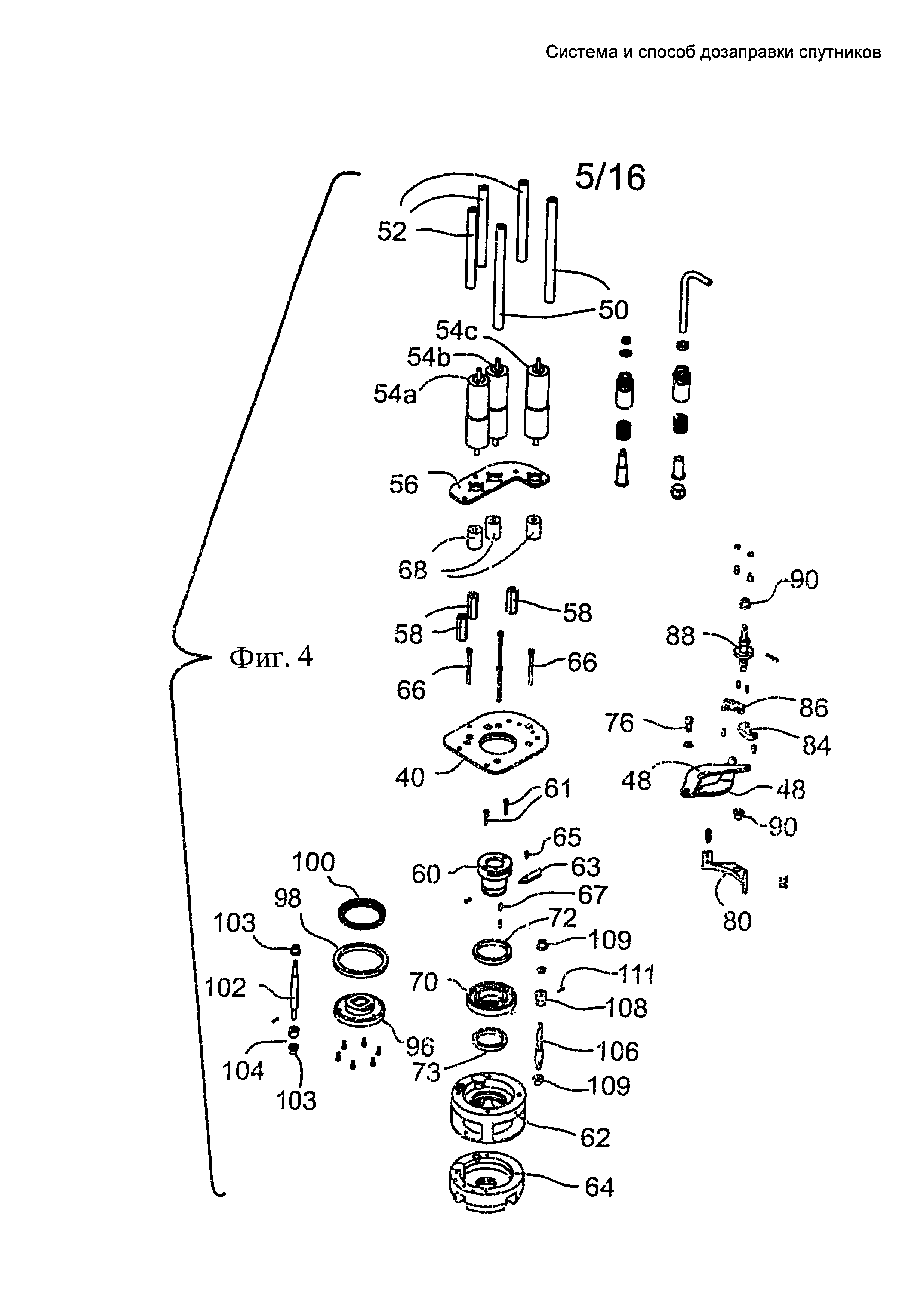
Фиг.4 изображает клапанный инструмент в разобранном виде;
Фиг.4b изображает вид в аксонометрии зажимного устройства, образующего часть клапанного инструмента;
Фиг.4c изображает вид в вертикальном разрезе исполнительного механизма клапана, образующего часть клапанного инструмента;
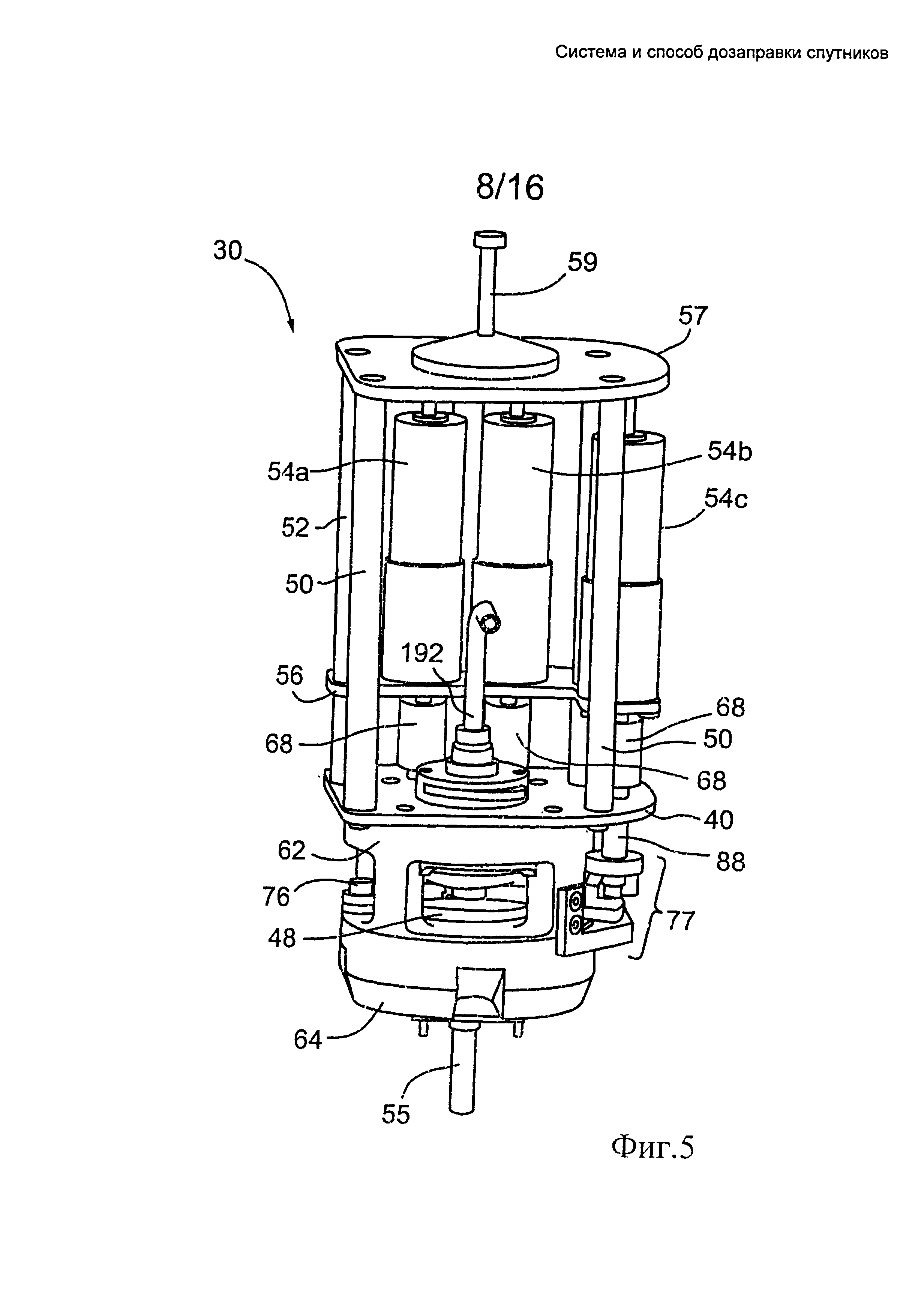
Фиг.5 изображает полностью собранный клапанный инструмент, содержащий гнездовой модуль;
Фиг.6 изображает модульное приспособление, на котором установлены различные соединители дозаправки и слива;
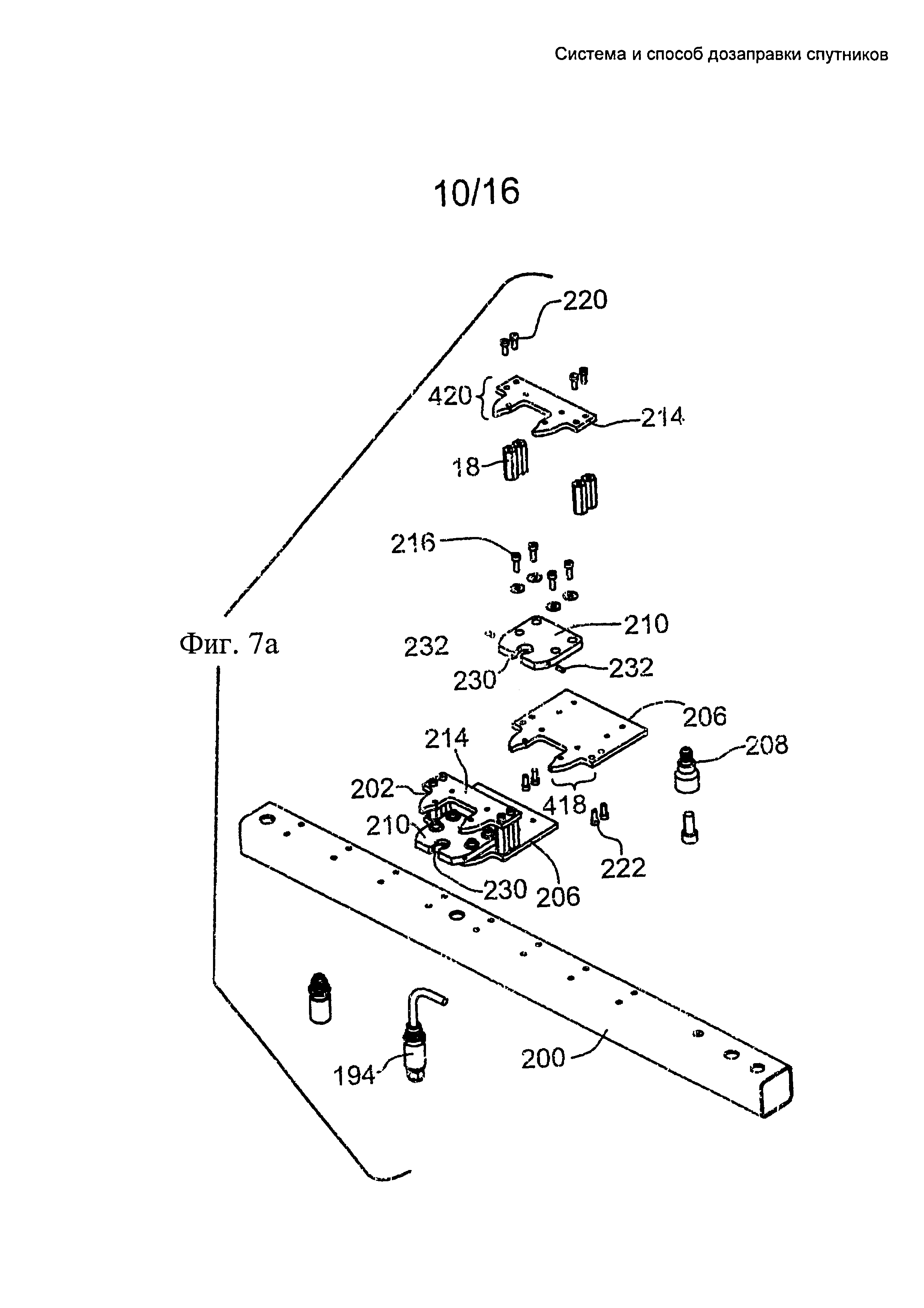
Фиг.7a изображает приспособление, изображенное на Фиг.6, в разобранном виде с одного ракурса;
Фиг.7b изображает приспособление, изображенное на Фиг.6, в разобранном виде, с ракурса, похожего, но отличающегося от ракурса Фиг.7а;
Фиг.8 изображает клапанный инструмент, образующий часть настоящего изобретения, удерживающий муфту трубопровода для топлива и соединяющий ее с топливным клапаном;
Фиг.8a изображает часть клапанного инструмента, зацепляющего крышку клапана на обслуживаемом спутнике;
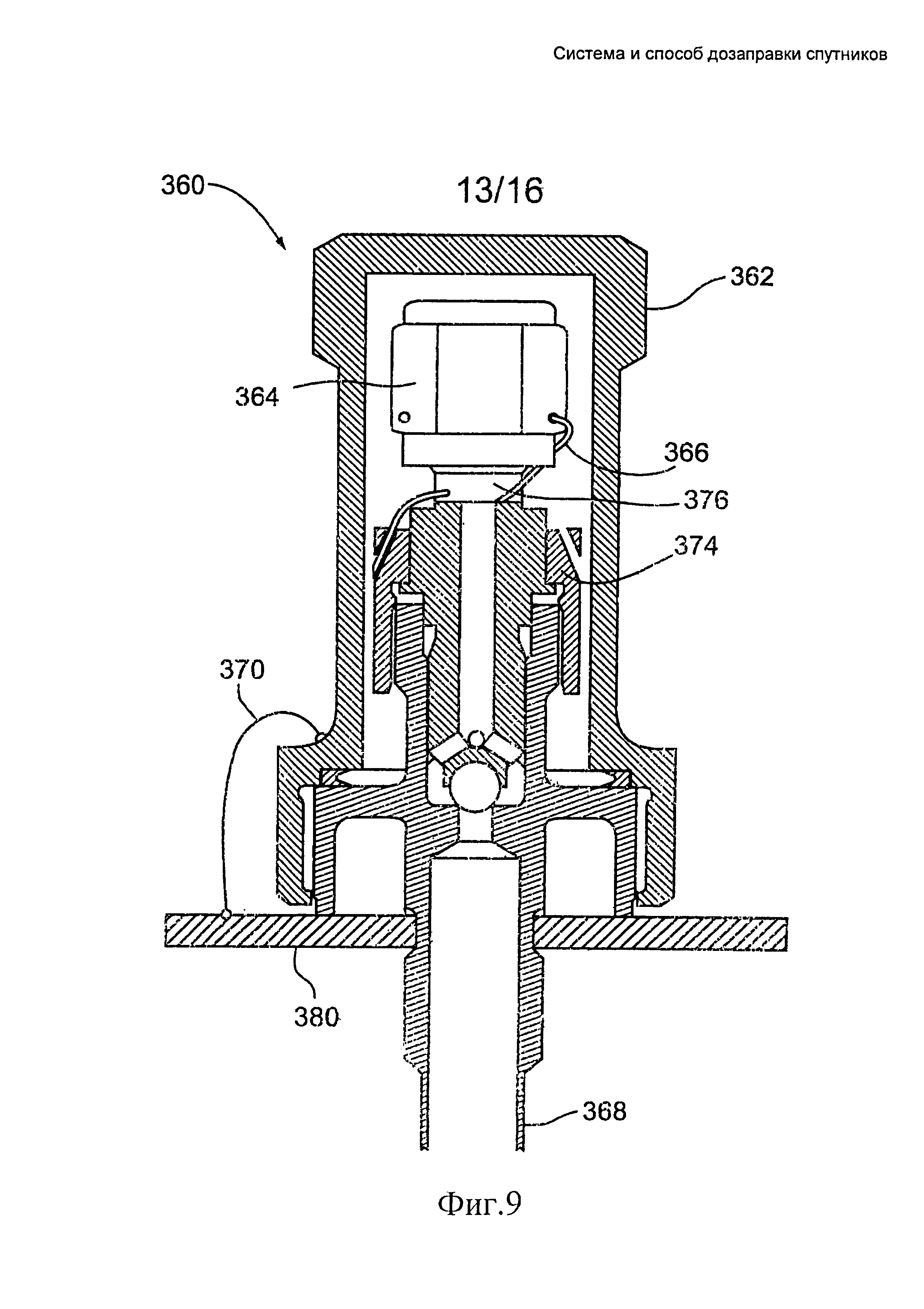
Фиг.9 изображает вид в поперечном разрезе обычного заправочного клапана для топлива, установленного на спутнике, который должен быть дозаправлен системой, образующей настоящее изобретение;
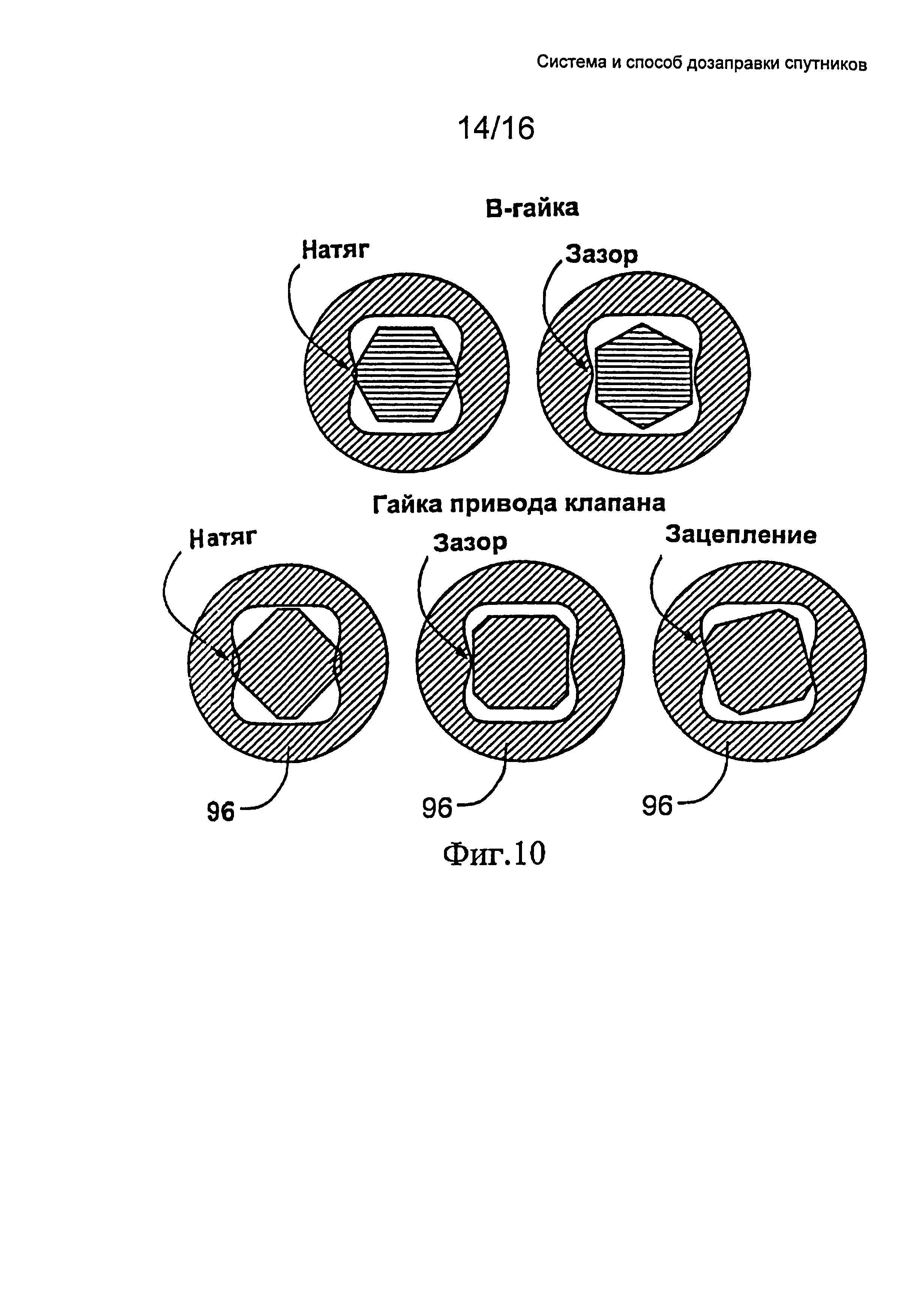
Фиг.10 изображает зазоры и натяги между В-гайкой и гайками исполнительного механизма клапана и исполнительным механизмом клапана;
Фиг.11 изображает систему управления утечками топлива/окислителя, образующую часть настоящего изобретения; и
Фиг.12 представляет собой блок-схему, показывающую этапы, включенные в дозаправку спутника при применении способа и системы, образующих часть настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В целом, описанные здесь системы направлены на способ дозаправки спутников и устройство для дозаправки спутников. Как это и требуется, здесь раскрыты варианты выполнения настоящего изобретения. Тем не менее, раскрытые варианты выполнения являются чисто иллюстративными, при этом нужно понимать, что изобретение может быть выполнено во многих различных и альтернативных формах. Чертежи выполнены не в масштабе, и некоторые детали могут быть увеличены или уменьшены, чтобы подробно показать конкретные элементы, тогда как соответствующие элементы могут быть исключены, чтобы не закрывать элементы, составляющие новизну изобретения. Поэтому, раскрытые здесь конкретные конструктивные и функциональные детали не должны рассматриваться как ограничивающие, а лишь как основа для формулы изобретения, и как базовую основу для обучения специалиста в данной области различным применениям настоящего изобретения. В целях обучения, а не ограничения, проиллюстрированные варианты выполнения направлены на устройство дозаправки спутников, систему для дозаправки спутников и способ.
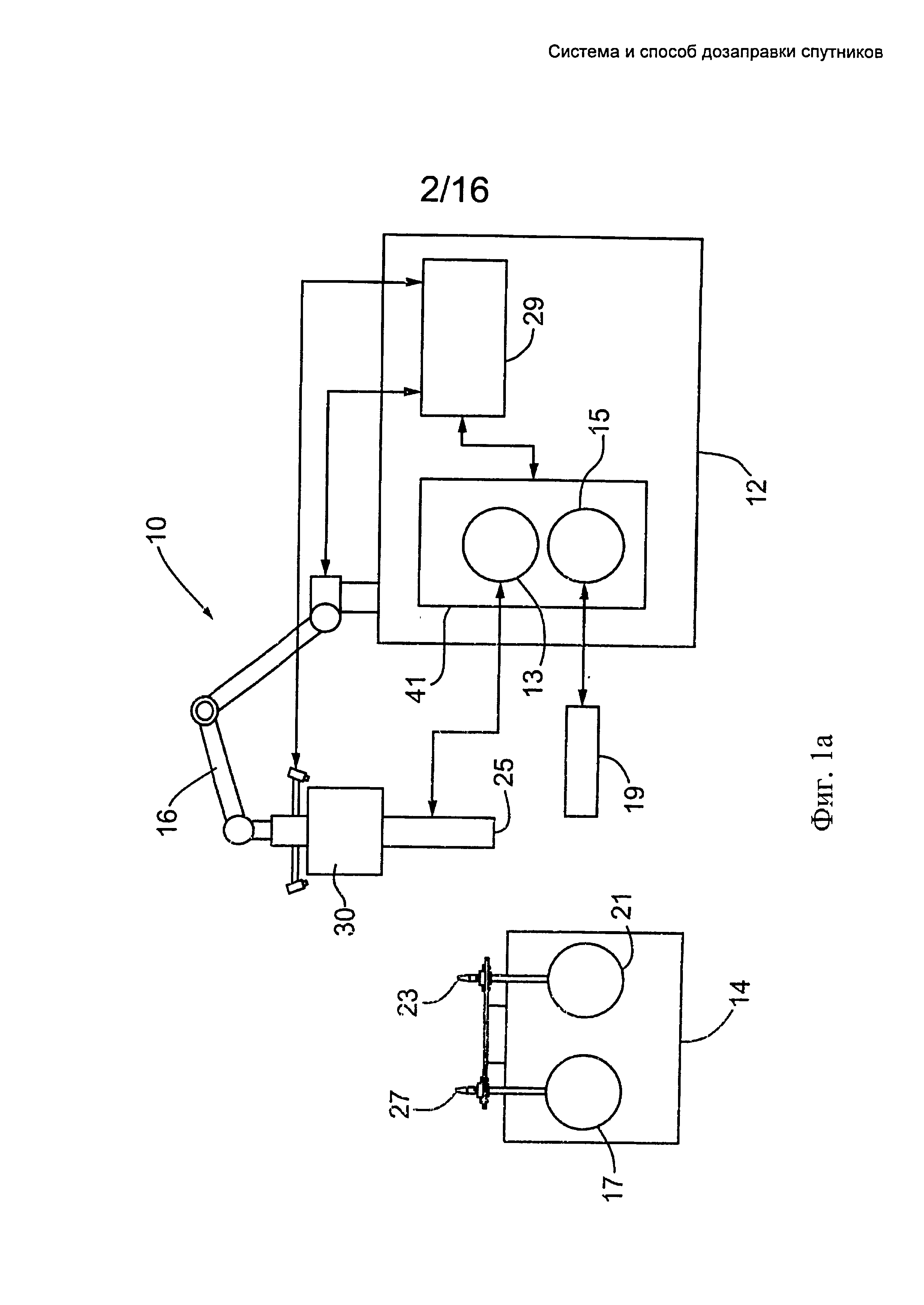
Как показано на Фиг.1 и 1a, настоящее изобретение в целом направлено на систему дозаправки для дозаправки неподготовленного или частично подготовленного обслуживаемого спутника 14. Система содержит систему 41 транспортировки текучей среды для транспортировки топлива от бака 15 для хранения топлива на обслуживающем космическом аппарате 12 к топливному баку 21 на обслуживаемом спутнике 14, и для транспортировки топлива от бака 13 для хранения окислителя на обслуживающем космическом аппарате 12 к баку 17 для окислителя на обслуживаемом спутнике 14. Система содержит инструментальное средство 30 для соединения заправочного трубопровода 19 для топлива с топливным отверстием 23 на баке 21 для топлива, и отсоединения заправочного трубопровода 19 для топлива от него, и для присоединения заправочного трубопровода 25 для окислителя к отверстию 27 для окислителя на баке 17 для окислителя, и отсоединения заправочного трубопровода 25 для окислителя от него. Следует понимать, что, тогда как на Фиг.1 и 1а не изображены подробности, система 41 транспортировки текучей среды в дополнение к бакам для хранения окислителя и топлива также содержит все другое необходимое оборудование для перекачивания окислителя и топлива от системы 41, такое как, но не ограничивающееся гидравлическими насосами, фильтрами, топливозаборными устройствами, клапанами, исполнительными механизмами клапанов и различными датчиками и мониторами. Описанная система транспортировки текучей среды может использоваться для пополнения либо топлива, либо окислителя, либо и того и другого на спутниках, которые требуют пополнения этих жидкостей. Это включает и спутники с двигателями на двухкомпонентном топливе, и спутники с двигателями на однокомпонентном топливе.
Система дозаправки содержит матрицу 26 датчиков для определения относительного смещения между инструментальным средством и отверстиями 23 и 27 для топлива и окислителя на обслуживаемом спутнике 14. Система включает механизм 16 позиционирования, соединенный с матрицей 26 датчиков для позиционирования инструментального средства 30 относительно отверстий 23 и 27 для топлива и окислителя на обслуживаемом спутнике 14 для соединения и отсоединения заправочных трубопроводов для топлива и окислителя, соответственно, с отверстиями для топлива и окислителя. Система содержит систему 29 управления, обменивающуюся данными с механизмом датчиков, средством позиционирования и инструментальным средством для управления работой механизма позиционирования и инструментального средства, основываясь на обратной связи от механизма датчиков.
В контексте настоящей патентной заявки фраза «неподготовленный обслуживаемый спутник» относится к спутнику, который был запущен на орбиту без каких-либо конструктивных особенностей, которые бы облегчили или способствовали дозаправке или обслуживанию на орбите.
В контексте настоящей патентной заявки фраза «частично подготовленный обслуживаемый спутник» относится к спутнику, в конструкции которого были предусмотрены обслуживание или дозаправка на орбите. На этих спутниках используются стандартные интерфейсы, но внедренные с учетом облегчения обслуживания на орбите. Примером этого может служить изменение конструкции термической системы, которая позволяет осуществлять удаление тепловых защитных покрытий от области вокруг заправочных отверстий для топлива и окислителя.
Как показано на Фиг.1, механизм 16 позиционирования содержит механизированную руку-манипулятор (которая может просто быть механизмом с двумя степенями свободы), и концевой исполнительный элемент 18, который выполнен с возможностью вставления и совмещения с различными инструментами, такими как клапанный инструмент 30, наряду с другими инструментами, которые содержатся в контейнере 20 хранения инструментов. Инструменты включают клапанный инструмент 30, как упомянуто выше, а также и резаки для разрезания тепловых защитных покрытий, покрывающих заполняющие клапаны, инструменты для удаления контровочных проволок, которые могут фиксировать различные движущиеся элементы на заполняющих клапанах, и инструмент для открепления и удаления внешних крышек на заполняющем клапане.
Обслуживаемый спутник 14 может быть спутником любого типа на любой орбите, нуждающийся в топливе для увеличения срока пребывания на орбите. Обслуживаемый космический корабль 12, хотя и показан в форме шаттла, может быть любым типом космического корабля, пилотируемого или беспилотного, но только поддерживающего сообщение с операторами на Земле, чтобы направлять механизированную руку-манипулятор 16 во время процесса дозаправки. В качестве альтернативы, механизированной рукой-манипулятором 16 можно управлять автономно во время процесса дозаправки, как будет обсуждено в дальнейшем. В этом режиме работы система дозаправки оборудована функцией искусственного зрения, которая используется, чтобы установить рабочую зону около клапана заполнения-слива.
Системой дозаправки затем управляют автономным образом, используя скорректированную модель рабочей зоны, полученную из зарегистрированной информации функции искусственного зрения. Сенсорная система 26 изображена в варианте выполнения, показанном на Фиг.1 и Фиг.1b, в виде двух фото или видеокамер, включенных для обеспечения визуальных изображений инструмента 30, которые передаются к станции, расположенной на Земле, для того, чтобы дать подтверждение оператору автономной процедуры дозаправки. Хотя изображены только две фото или видеокамеры, что, как полагают, является оптимальным необходимым количеством, подразумевается, что может быть использовано большее или меньшее количество фото или видеокамер 26.
Как было упомянуто выше, система управления, используемая для управления системой дозаправки, может быть выполнена одним из нескольких способов. В одном варианте выполнения системы операция дозаправки может управляться телеоператором, а именно, человеком, удаленно управляющим системой через пользовательский интерфейс, причем этот человек может быть расположен на Земле или на другом космическом корабле или космической станции. В другом варианте выполнения система может быть выполнена с возможностью управления в автономном режиме работы, в котором система управления содержит компьютеры, которые управляют всеми или некоторыми из операций дозаправки обслуживающего устройства. Эти компьютеры могут быть расположены на космическом корабле обслуживающего устройства, или же они могут быть расположены на Земле, или на другом космическом корабле. В другом варианте выполнения система дозаправки может быть выполнена с возможностью работы в контролируемом автономном режиме таким образом, чтобы система управления использовала комбинацию дистанционного управления и автономной операции. В контролируемом автономном режиме пользователь контролирует операции обслуживания и дает команды запуска автономным операциям, которые могут быть элементными операциями или заранее запрограммированной цепочкой команд. Таким образом, система управления может быть выполнена с возможностью осуществления немного дистанционного управления и немного автономной или контролируемой автономной операции для этой миссии. Система может быть выполнена с возможностью использования всех этих режимов работы, при этом пользователь может переключать между различными режимами.
Клапанный инструмент 30 содержит несущую конструкцию, механизм держателя гнездового модуля, установленный на несущей конструкции, выполненной с возможностью размещения в ней взаимозаменяемых гнездовых модулей, которые описаны далее, и механизм привода гнезда, установленный на указанной несущей конструкции для приведения в действие гнездовых модулей, когда они расположены в указанном механизме держателя гнездовых модулей. Клапанный инструмент 30 содержит зажимной механизм, установленный на несущей конструкции для закрепления клапанного инструмента 30 в области реакции на заправочном клапане для топлива и заправочном клапане для окислителя. Зажимной механизм выполнен так, чтобы локализовать вращающий момент, вырабатываемый клапанным инструментом 30 для того, чтобы гарантировать, что любые реактивные моменты от гнездового приводного устройства реагируют локально для предотвращения повреждения клапана на баках обслуживаемого спутника. Клапанный инструмент 30 содержит приводной механизм клапана, установленный на несущей конструкции, используемый для открытия и закрытия заправочных клапанов для топлива путем приведения в действие соответствующих исполнительных кулачков клапана. Эти элементы, составляющие клапанный инструмент 30, будут теперь описаны более подробно.
На Фиг.2 в увеличенном виде изображен вариант выполнения клапанного инструмента 30, установленного на концевом исполнительном элементе 18 с фото или видеокамерами 26, установленными на балках 28, которые выполнены так, чтобы обеспечивать ясное и беспрепятственное представление клапанного инструмента 30 и клапана 55 на спутнике 14; Фиг.3 показывает вид в аксонометрии частично собранного клапанного инструмента 30, а Фиг.4 показывает клапанный инструмент 30 в разобранном виде. Со ссылкой на оба чертежа Фиг.3 и 4, несущая конструкция содержит пластину 40 основания с двумя длинными стойками 50, прикрепленными к основанию 40. Пластина 56 конструкции двигателя прикреплена болтами сверху трех прокладок 58, которые, в свою очередь, прикреплены болтами к пластине 40 основания. Механизм держателя гнездового модуля содержит держатель 60 гнездового модуля и удерживающий модуль стержень 63.
Механизм привода гнезда содержит редукторные узлы 54b, одну из муфт 68, болты 61, зубчатую передачу 70 внешнего зацепления, подшипники 72 и 73, вал 106 и шестерню 108. Механизм привода гнезда используется для приведения в действие гнезд, расположенных в держателе 60 гнездового модуля, и приводится в действие редукторным узлом 54b, который, наряду с редукторным узлом 54c, используемым для приведения в действие зажимного механизма 77, который описан ниже, установлен на пластине 56 конструкции двигателя, а вал каждого двигателя 54а, 54b и 54c соединен с соответствующей муфтой 68. Три коротких стержня 52 прикреплены болтами сверху пластины 56 конструкции двигателя. Средняя часть 62 основания установлена сверху нижней части 64 основания, и обе прикреплены вместе к пластине 40 основания болтами 66. Передача 70 размещена в круглом отверстии в средней части 62 основания, а держатель 60 гнездового модуля размещен в передаче 70 (видно только на Фиг.4). Передача 70 и держатель 60 модуля поддерживаются верхним шарикоподшипником 72 и нижним шарикоподшипником 73. Верхний подшипник 72 поддерживается пластиной 40 основания. Нижний подшипник 73 поддерживается средней частью 62 основания.
Со ссылкой на Фиг.4 и Фиг.4b, зажимной механизм 77 с двумя пальцами 48 прикреплен болтами к средней части 62 основания болтом 76, при этом два пальца поворачивается вокруг оси, задаваемой болтом 76. Опора 80 зажима установлена на стороне средней части 62 основания. Инструмент 30 содержит два зажимных звена 84 и 86, прикрепленных к зажимному пальцу 48 и к зажимному валу 88 перпендикулярно плоскости приведения в действие зажимных пальцев 48, содержащей ось 51 (Фиг.4b). Когда узел редукторного узла 54 с поворачивает зажимной вал 88 на половину оборота вокруг оси 49 вала, зажимные звенья 84 и 86 либо отталкивают концы зажимных пальцев 48 друг от друга, что закрывает поверхности захвата на зажиме на области реакции клапана 55, или выдвигают концы зажимных пальцев 48 вместе, что открывает зажим достаточно для того, чтобы обеспечить прохождение клапана 55. Зажимной вал 88 поддерживается на обеих концах втулками 90. Верхняя втулка 90 запрессована в пластине 40 основания, а нижняя втулка 90 запрессована в опоре 80 зажима, которая присоединена к средней части 62 основания.
Со ссылкой на Фиг.4c, механизм 87 приведения в действие клапана содержит зубчатую передачу 96 внешнего зацепления с внутренним профилем гаечного ключа, как показано на Фиг.10. Зубчатая передача 96 внешнего зацепления поддерживается подшипником 98 и прикреплена к этому подшипнику с помощью держателя 100 подшипника. Зубчатая передача 96 внешнего зацепления приводится в действие шестерней 104, прикрепленной к валу 102. Вал 102 присоединен к редукторной коробке 54а посредством муфты 68. Концы вала 102 вставлены во втулки 103, причем верх втулки запрессован в пластину 40 основания, а нижний конец запрессован в пластину 64 основания.
Механизм 87 приведения в действие клапана приводится в действие редукторной коробкой 54a. Поскольку редукторная коробка 54а вращается, вал 102 вращается, а также вращается и привод 96 шестерни 104, у которого есть параллельные плоскости, подобные гаечному ключу, которые взаимодействуют с гайкой приведения в действие клапана 55. Это взаимодействие обеспечивает открытие привода 96 и закрытие клапана 55.
Вид спереди полностью собранного инструмента 30 изображен на Фиг.5. Несущая конструкция содержит верхнюю пластину 57, прикрепленную болтами к двум длинным стержням 50 и трем коротким стержням 52. Гнездовой модуль 192 топливопровода изображен захваченным инструментом 30. Захватывающее приспособление 59 прикреплено болтами к верху верхней пластины 57 и используется концевым исполнительным элементом 18, чтобы захватить инструмент 30. Рядом с захватывающим приспособлением 59 установлена половина n-штырькового электрического соединителя (не показана). На концевом исполнительном элементе 18 установлен механизм сопряжения соединителя (не показан). Как только концевой исполнительный элемент 18 заканчивает захват инструмента 30, механизм сопряжения соединителя удлиняет противоположную половину электрического соединителя на соединителе, установленном на пластине 57, обеспечивая, тем самым, энергию и управляющие сигналы для инструмента.
Пластина 40 основания, средняя часть 62 основания и нижняя часть 64 основания формируют основной корпус инструмента 30, поддерживающий все внутренние элементы. Конструкция содержит пластину 56 конструкции двигателя, короткие стойки 52 и длинные стойки 50 и верхнюю пластину 57. Эта конструкция выполняет три функции, а именно: i) защищают двигатели 54a, b и c, ii) обеспечивают конструкцию для прикрепления основания (образованную опорной плитой 40, средней секцией 62 основания и нижней секцией 64 основания) к верхней пластине 57, и iii) обеспечивают выравнивающие направляющие (длинные стойки 50) для операций, использующих приспособление, изображенное на Фиг.7 и описанное далее.
Эти три редукторных узла 54a, 54b и 54c могут быть идентичными, хотя они и не обязаны быть идентичными. Используемые двигатели являются щеточными двигателями постоянного тока, однако, нужно понимать, что могут использоваться бесщеточные двигатели постоянного тока, шаговые двигатели, электродвигатели переменного тока, серводвигатели или другие типы двигателей. Используемые передачи являются планетарными передачами. Могут использоваться и другие передачи, такие как цилиндрическая прямозубая передача. В идеале, но не обязательно, коробки передач могут быть выполнены с возможностью обратного хода. Если двигатели могут обеспечить достаточный вращающий момент, коробки передач могут быть и вообще не нужны.
Функцией зажимного механизма 77 является фиксирование клапанного инструмента 30 к области реакции клапана 55, гарантируя, тем самым, что любые вращающие моменты реакции от механизма привода гнезда или привода клапана реагируются локально, чтобы предотвратить повреждение клапана.
Со ссылкой на Фиг.4b, зажимной механизм 77 является двойным четырехстержневым звеном, причем четыре основные части звена представляют собой зажимной вал 88, зажимное звено 84 или 86, зажимные пальцы 48 и основание клапанного инструмента 30, образованные средней частью 62 основания и нижней частью 64 основания. Зажим приводится в действие редуктором 54 справа от инструмента, показанного на Фиг.5. Редуктор 54c приводит в действие зажимной вал 88 через связанную с ним гибкую муфту 68. Зажимной вал 88 является входом и поворачивается на полоборота, чтобы зажим перешел из открытого положения в закрытое положение. Зажимные звенья 84 и 86 толкают и тянут зажимные пальцы 48, соответственно, в закрытое или открытое положение.
Геометрия четырехстержневого механизма зажима была выбрана так, что в закрытом положении зажим имел запирающие характеристики в «среднем положении». Редукторный узел 54c используется для открытия или закрытия зажимного механизма, но, когда зажимной механизм находится в любом из положений, любые силы, приложенные клапаном 55 к «области реакции», передаются непосредственно через зажимной вал 88, а не через двигатель 54c. Это позволяет двигателю 54c быть значительно меньше и легче, чем в случае, если бы конструкция зажима была такова, что любые силы, приложенные клапаном к «области реакции», вместо этого передавались бы непосредственно через двигатель 54c.
Механизм держателя 60 гнездового модуля выполняет две функции: 1) затягивание B-гайки или гайки топливопровода на клапан или с клапана топливного бака на заправляемом горючим спутнике; и 2) вставление и удержание соответствующих модулей, требующихся для соединения системы переноса текучей среды к окислителю и топливным бакам на обслуживаемом спутнике.
Держатель 60 гнездового модуля приводится в действие редуктором 54b в центре группы трех двигателей 54a-54c, изображенных на Фиг.5. Центральный редуктор 54b приводит в действие вал 106 через связанную с ним гибкую муфту 68 (Фиг.4). Вал 106 поддерживается на обоих концах втулками 109. Верхняя втулка 109 запрессована в пластине 40 основания, а нижняя втулка 109 запрессована в среднюю часть 62 основания.
Со ссылкой в частности на Фиг.4, шестерня 108 присоединена к валу 106 посредством радиального установочного штифта 111. Тогда шестерня 108 приводит в действие передачу 70. Передача 70 присоединена к держателю 60 модуля двумя винтами 61.
Держатель 60 гнездового модуля выполнен с возможностью вставления и приведения в действие шестиугольной В-гайки клапанов, расположенной на топливном баке и резервуаре окислителя обслуживаемого спутника, и вставления и удержания различных гнездовых модулей. Гнездо 192/194 топливопровода и линии окислителя и гнездовые модули 196/198 (Фиг.3) удерживаются на месте с помощью удерживающего модуль стержня 63. Удерживающий модуль стержень 63 вращается вокруг установочного винта 65. Удерживающий модуль стержень 63 имеет систему фиксатора, которая поддерживает удерживающий стержень 63 либо в «открытом», либо в «закрытом» положении. Эта система фиксатора содержит пружину 67 шарового фиксатора, расположенную в держателе 60 модуля, которая взаимодействует с двумя отверстиями в удерживающем модуль стержне 63, соответствующим «открытым» и «закрытым» положениям на удерживающем В-модуль стержне 63. Различные гнезда выполнены, чтобы включать V-образную канавку 79, расположенную по окружности гнезда так, что, когда гнездо вставлено в держатель 60 гнездового модуля, удерживающий стержень 63 может быть перенаправлен в канавку 79, захватив гнездо, препятствуя его выскакиванию из держателя 60 гнездового модуля во время работы.
На Фиг.6 изображен вид в аксонометрии собранного модульного приспособления 190, предназначенного для удержания различных гнездовых модулей, причем один гнездовой модуль 192 трубопровода для топлива предназначен для включения заправочного клапана 55 для топлива, присоединяя, таким образом, топливный бак на обслуживаемом спутнике к системе переноса топлива на космическом корабле обслуживающего устройства через трубку, являющуюся частью гнездового модуля 192 трубопровода для топлива, другой гнездовой модуль 194 трубопровода для окислителя предназначен для включения заправочного клапана для окислителя, присоединяя, таким образом, резервуар окислителя на обслуживаемом спутнике к системе переноса окислителя на космическом корабле обслуживающего устройства через трубку, являющуюся частью гнездового модуля 194 трубопровода для окислителя, и третий гнездовой модуль 196, предназначенный для зацепления крышки доступа клапана (B-гайки) на заправочном клапане для топлива, и четвертый гнездовой модуль 198, предназначенный для зацепления крышки доступа клапана (В-гайки) на заправочном клапане для окислителя. Также имеется место 208 хранения на рельсе 200 для B-гайки.
Хотя это и не показано на Фиг.6, приспособление 190 для инструментов содержит держатель для клапанного инструмента 30 и других инструментов, таких как средство разрезания защитного покрытия, инструмент удаления и замены внешней крышки и инструмент распорки защитного покрытия. Таким образом, в начале, когда система дозаправки развернута, любой из необходимых инструментов может быть прикреплен к концевому исполнительному элементу позиционирующего механизма 16, использоваться, а затем быть убран в держатель хранения.
На Фиг.7a и 7b изображено модульное приспособление 190 в разобранном виде. Со ссылкой на Фиг.6, 7a и 7b, приспособление 190 содержит трубчатый рельс 200, на котором установлены четыре модульных приспособления 202. На Фиг.7 более подробно показаны элементы приспособлений 202. Каждое приспособление 202 содержит пластину 206 основания, удерживающую пластину 210 гнездового модуля и верхнюю пластину 214. Удерживающая пластина 210 гнездового модуля прикреплена непосредственно к пластине 206 основания болтами 216, а верхняя пластина 214 отделена выше от пластины 206 основания прокладками 218 и прикреплена к прокладкам 218 болтами 220, тогда как прокладки прикреплены к пластине 206 основания болтами 222. V-образные канавки 79 расположены сверху гнездовых модулей 192, 194, 196 и 198, и выполнены с возможностью сопряжения с пружиной 232 шарового фиксатора, чтобы удерживать модули 192, 194, 196 и 198 на месте в каждом из четырех держателей 202 гнездового модуля.
Удерживающий модуль стержень 63 активируется шпонкой 234 (показана на Фиг.7b) на удерживающей пластине 210 гнездового модуля. Когда инструмент 30 полностью подключен к модульному приспособлению 190, шпонка 234 на удерживающей пластине 210 гнездового модуля находится близко к наружному диаметру держателя 60 модуля. Удерживающий модуль стержень 63 выступает за пределы этого диаметра. Когда двигатель 54b механизма привода гнезда активирован, удерживающий модуль стержень 63 в конечном счете войдет в соприкосновение со шпонкой 234 на удерживающей пластине 210 гнездового модуля и будет перенаправлен к противоположному положению. Перемещение гнезда по часовой стрелке фиксирует модуль в держателе 60 модуля и, наоборот, перемещение гнезда против часовой стрелки отпирает модуль.
Вторая пружина шарового фиксатора в гексагональной части гнезда держателя 60 модуля используется, чтобы зацепить В-гайку клапана и удерживать ее на месте, когда ее переносят от клапана в положение 208 ее хранения.
На Фиг.8 изображена система дозаправки, соединенная с топливным клапаном 55 обслуживаемого спутника с помощью клапанного инструмента 30, удерживающего гнездовой модуль 192 топливопровода, сцепленный с клапаном 55, присоединяя, таким образом, гнездовой модуль 192 топливопровода к заправочному клапану 55 для топлива. Эта конфигурация достигается после того, как произошел захват спутника обслуживающего устройства и его стыковка с обслуживаемым спутником, а система заправки на спутнике обслуживающего устройства была развернута, крышки доступа клапана (B-гайки) на резервуарах топлива/окислителя были удалены, используя гнездовые модули 196 и 198: эти процессы изложены более подробно ниже. Как можно видеть из Фиг.8, нижняя часть 64 основания несущей конструкции включают проход, размеры которого и связанные с ним вводы 410 выполнены такими, чтобы вместить часть заправочного клапана 55 для топлива (и сопоставимого клапана, расположенного в наполняющем отверстии резервуара окислителя обслуживаемого спутника). Как упомянуто выше, несколько частей клапанного инструмента 30 выполнено конкретно для автоматизированного дистанционного управления, обеспечивая детали ввода, например, нижняя часть 64 основания содержит вводы (скосы) 410. Эти вводы наряду со срезами 46 обеспечивают сопряжение нижней части 64 основания с заправочным клапаном 55 для топлива, присоединяя, таким образом, гнездовой модуль 192 топливопровода к клапану 55. Держатель 60 гнездового модуля установлен в средней части 62 основания таким образом, что, когда гнездовой модуль расположен в держателе 60 модуля, часть гнездового модуля выступает в проход, чтобы включить заправочный клапан для топлива и указанный заправочный клапан для окислителя.
На Фиг.9 изображен вид в продольном разрезе типичного заправочного клапана 55 для топлива, установленного на обслуживаемом спутнике, который должен быть заправлен топливом с помощью клапанного инструмента 30. Клапан 55 содержит внешнюю крышку 362 и контровую проволоку 370 внешней крышки, прочно закрепленную на основании 380. Крышка 364 B-гайки навинчена на шток 368 клапана, а контровая проволока 366 прочно прикрепляет крышку 364 B-гайки к штоку клапана. Гайка 374 приведения в действие выполнена с возможностью вращения, чтобы открывать или закрывать клапан. Контровая проволока 372 прикрепляет гайку 374 приведения в действие к штоку 368 клапана.
Со ссылкой на Фиг.10, передача 96 привода клапана выполнена с возможностью вмещения и приведения в действие квадрата привода клапана. Часть привода клапана в форме «гаечного ключа» выполнена так, что она обеспечивает максимальный зазор, когда проходит мимо В-гайки клапана, и достаточную контактную поверхность для приведения в действие привода клапана.
Инструмент 30 выполнен, чтобы быть в состоянии использоваться совместно с изображениями, полученными с помощью фото или видеокамер 26. Открытость конструкции и вырезы в основании позволяет фото или видеокамерам видеть все критические фазы работы инструмента. Вырезы 69 предусмотрены в средней части 62 основания, а также вырезы 46 предусмотрены в нижней части 64 основания (см. Фиг.3 и 5). Имеются детали, которые выточены в следующих частях и в конструкции, чтобы обеспечить легкую интерпретацию положений с помощью фото или видеокамер 26: держателе 60 модуля, передаче 96, удерживающем модуль стержне 63 и зажиме 77.
Несколько частей клапанного инструмента 30 и приспособления 190 для инструментов разработаны конкретно для автоматизированного дистанционного управления, обеспечивая особенности ввода. Они содержат нижнюю часть 64 основания, которая имеет вводы (скос) 410 (Фиг.8), передачу 96, которая имеет вводы (скос) 412, держатель 60 модуля, который имеет вводы (скос) 414 (Фиг.8a) и (скос) 416 (верх для модулей и низ для B-гаек), конструкцию инструмента, верхнюю пластину 214 модульного приспособления, которая имеет вводы 420, и пластину 206 основания модульного приспособления, которая имеет вводы 418 (Фиг.6 и 7).
Вариант выполнения системы может включать систему управления утечкой топлива. Во время каждого цикла соединения-отсоединения имеется минимальная утечка топлива в диапазоне 2 см2. Во многих случаях эта утечка не будет наносить ущерба либо обслуживаемому спутнику, либо космическому кораблю обслуживания, и может медленно быть откачена в пространство. В других случаях обслуживаемый космический корабль с чувствительными элементами, такими как оптика или выдвинутые передачи, может потребовать управления топливом утечки. Быстросъемные соединители предлагают средство для минимизации утечек до приемлемого уровня, но эти соединители должны быть установлены на обслуживаемые спутники до их запуска.
Система управления утечкой, проиллюстрированная в целом на Фиг.11 и обозначенная номером позиции 600, откачивает объем утечки в вакуумную камеру 602, расположенную на борту космического корабля обслуживающего устройства, растворяя утечку прежде, чем она будет эвакуирована управляемым способом в космическое пространство. Таким образом, прежде, чем обслуживающий инструмент отделен от обслуживаемого клапана, утечка перенаправляется к вакуумной камере 602, растворяя жидкость утечки. Более конкретно, как только космический корабль обслуживания соединился с обслуживаемым спутником, а система переноса текучей среды присоединена к топливному баку обслуживаемого спутника, в начальном состоянии клапаны A, B, C, и D закрыты. Затем клапан D открывают для соединения камеры 602 с вакуумом, и как только это достигается, клапан D закрывают. После завершения передачи топлива от сборного бака на обслуживающем космическом корабле к топливному баку обслуживаемого спутника любое лишнее топливо в линиях должно быть удалено. Чтобы растворить лишнее топливо, клапан В затем открывают, а топливо, остающееся в топливных линиях передачи, втягивают в камеру 60. В камеру 602 затем под давлением накачивают гелий, а клапан D затем открывают, чтобы продуть растворенный топливный пар на сторону зенита обслуживающего космического корабля через отверстие 604. Продутую струю газов топлива или окислителя направляют в сторону от связки космического корабля и обслуживаемого спутника, сводя к минимуму возможность коррозии чувствительных элементов космического корабля.
На Фиг.12 изображена блок-схема всех этапов по дозаправке космического корабля. После удаления теплового защитного покрытия, внешней крышки заправочного клапана и разрезания контровых проволок клапанный инструмент прикрепляют к концевому исполнительному элементу. Когда инструмент находится в работе, рабочие последовательности «дозаправки топливом» одного из топливопроводов состоят в следующем:
1. Установка Модуля B-гайки
2. Удаление B-гайки
3. Хранение B-гайки
4. Хранение Модуля B-гайки
5. Установка Модуля Топливопровода
6. Прикрепление Топливопровода
7. Открытие Клапана
8. Дозаправка топливом
9. Закрытие Клапана
10. Отделение Топливопровода
11. Хранение Модуля Топливопровода
12. Установка Модуля B-гайки
13. Извлекание B-гайки
14. Установка B-гайки на место
15. Хранение Модуля B-гайки
последовательность заканчивается
Эти задачи подразделяются на детальные этапы, показанные ниже.
Следует обратить внимание на следующее:
[Инструмент] обращение к действиям, которые выполняет инструмент.
[Робот] обращение к действию, которое выполняет робот.
Установка Модуля B-гайки
1. [Робот] Переместить клапанный инструмент 30 близко к приспособлению 190 для инструмента с модулем 198 B-гайки
2. [Робот] Установить высоту клапанного инструмента 30 так, чтобы верхняя пластина 57 инструмента была бы выше верха модуля 198 B-гайки и так, чтобы средняя пластина 40 клапанного инструмента была бы ниже низа модуля 198 B-гайки. Вид с фото или видеокамеры будет использоваться для позиционирования инструмента 30 относительно приспособления 190 для инструмента, (фото или видеокамера замены инструмента).
3. [Робот] Переместить клапанный инструмент 30 к выравнивающим клапанный инструмент стойкам 50 приспособления 190 для инструмента на направляющие 214 приспособления для инструмента. Обеспечить легкое касание стойками 50 направляющих 214.
4. [Инструмент] Активировать привод 54b B-гайки клапанного инструмента, чтобы установить удерживающий модуль стержень 63 далеко от приспособления 190 для инструмента.
5. [Робот] Перемещать клапанный инструмент 30 вверх до тех пор, пока средняя пластина 40 клапанного инструмента не коснется удерживающей пластины 210 гнездового модуля нижних шпонок 234 приспособления для инструмента.
6. [Инструмент] Активировать привод 54b B-гайки клапанного инструмента в «запирающем» направлении до тех пор, пока запирающий механизм не будет зацеплен (приблизительно 1/2 поворота).
7. [Робот] Переместить клапанный инструмент 30 вниз, пока модуль 198 B-гайки (теперь прикрепленный к клапанному инструменту 30) не будет находиться ниже низа приспособления 190 для инструмента.
8. [Робот] Переместить клапанный инструмент 30 непосредственно от приспособления 190 для инструмента.
9. С установленным теперь модулем 190 B-гайки, возобновить следующую задачу.
Удаление B-гайки
Предположим, что модуль B-гайки установлен
1. [Робот] Переместить инструмент 30 выше клапана 360 рядом с ним. Это может быть достигнуто путем перемещения робота в заранее запрограммированное положение.
2. [Робот] Выравнить центр инструмента 30 с клапаном. Выравнивание может быть достигнуто с использованием двух ортогональных изображений от фото или видеокамеры, (фото или видеокамеры совмещения)
3. [Робот] Выравнить Инструмент с плоскими зонами области 376 реакции на клапане. Это выравнивание достигают путем вращения инструмента 30 вокруг его продольной оси до тех пор, пока прямоугольная пластина 372, на которую установлен клапан, не будет выглядеть квадратным на обоих изображениях фото или видеокамер совмещения.
4. [Инструмент] Обеспечить открытие зажима 77
5. [Робот] Посадить инструмент 30 на клапан 360. Для достижения этого годятся два подхода:
6. Подход 1: Предварительно выравнить контактные поверхности инструмента, чтобы ввести в сопряжение соответствующие поверхности клапана, используя изображения с фото или видеокамер, которые дают четкое представление контактных поверхностей инструмента, следующим образом:
a. [Робот] Выравнить инструмент 30 с плоскими зонами области 376 реакции на клапане 360
b. [Инструмент] Выравнить шестигранник на приводе 60 В-гайки с В-гайкой 364 на клапане 360
c. [Инструмент] Выравнить плоские зоны привода 96 клапана на инструменте 30 с плоскими зонами привода 374 клапана на клапане
d. [Робот] Перемещать инструмент 30 вниз, пока инструмента полностью не посажен
7. Подход 2: Переместить инструмент 30 вниз по клапану 360, пока он не застрянет на деталях клапана. Инструмент застрянет, если гнездо B-гайки не будет выравнено с B-гайкой 364, или же если плоские зоны привода 96 клапана не выравнены с приводом 374 клапана на клапане. Реперные метки на изображении фото или видеокамеры совмещения указывают, какая деталь не выравнена. Инструмент может застрять на обеих, на одной из деталей, или не застрять вовсе.
a. Переместить инструмент 30 вниз по клапану, пока привод 60 B-гайки на инструменте не застрянет на B-гайке 364.
b. Медленно затянуть привод 60 B-гайки, пока инструмент не станет вновь незастрявшим.
c. Если инструмент теперь застрянет на приводе 374 клапана, медленно затянуть ключ 96 привода клапана на инструменте 30, пока он не станет вновь незастрявшим.
8. [Инструмент] Закрыть зажим 77
9. [Инструмент] Активировать привод 96 клапана в «затягивающем» направлении
10. [Инструмент] Активировать привод 60 В-гайки в «ослабляющем» направлении, пока B-гайка не будет полностью отвинчена (приблизительно 5 оборотов)
11. [Робот] Приложить направленную вниз силу.
12. [Инструмент] Открыть зажим 77
13. [Робот] Переместить инструмент 30 вверх, пока он не освободится от клапана 360
14. [Робот] Переместить инструмент 30 от клапана 360
15. Готовность приступить к следующей задаче
Хранение B-гайки
Предположим, что модуль 90 B-гайки установлен, а B-гайка 364 находится в инструменте.
1. [Робот] Переместить Инструмент 30 выше стойки 208 хранения B-гайки и рядом с ней. Это может быть достигнуто путем подачи команды роботу переместиться в заранее запрограммированное положение.
2. [Робот] Выравнить центр инструмента 30 со стойкой 208 хранения B-гайки, используя фото или видеокамеру замены инструмента.
3. [Робот] Выравнить Инструмент 30 с плоскими зонами области реакции на стойках 208 хранения B-гайки
4. [Инструмент] Обеспечить открытие зажима 77
5. [Робот] Переместить инструмент вниз, пока инструмент не будет полностью посажен
6. [Инструмент] Закрыть зажим 77
7. [Инструмент] Активировать привод 66 B-гайки в «затягивающем» направлении, пока B-гайки 364 полностью не завинчен (приблизительно 5 оборотов)
8. [Инструмент] Выравнить плоские зоны привода 96 клапана с плоскими зонами на В-гайке 364
9. [Инструмент] Открыть зажим 77
10. [Робот] Переместить инструмент 30 вверх, пока он не освободится от стойки 208 хранения B-гайки.
11. [Робот] Переместить инструмент 30 от стойки 208 хранения B-гайки
12. Готовность приступить к следующей задаче
Хранения Модуля B-гайки
Предположим, что B-гайка 364 не находится в инструменте 30
1. [Робот] Переместить инструмент 30 близко к приспособлению 202
2. [Робот] Выставить высоту инструмента 30 так, чтобы верхняя пластина 57 инструмента была бы выше верха приспособления и так, чтобы верх 198 модуля В-гайки был ниже низа 206 приспособления.
3. [Робот] Переместить инструмент 30 к выравнивающим стойкам 50 инструмента приспособления на направляющие #7 и #8 приспособления. Обеспечить легкое касание стойками направляющих.
4. [Инструмент] Активировать привод 54b B-гайки инструмента, чтобы установить стопорный механизм далеко от приспособления 202.
5. [Робот] Переместить инструмент 30 вверх, пока средняя пластина 40 инструмента не коснется нижней шпонки 234 приспособления.
6. [Инструмент] Активировать привод 54b B-гайки инструмента в «отпирающем» направлении, пока стопорный механизм не расцепится (1 оборот).
7. [Робот] Переместить инструмент 30 вниз, пока средняя пластина 40 инструмента не будет ниже низа модуля 198 В-гайки.
8. [Робот] Переместить инструмент 30 непосредственно от приспособления 202.
9. Готовность приступить к следующей задаче
Установка Модуля Топливопровода
Предположим, что в инструменте нет никаких модулей
1. [Робот] Переместить инструмент 30 вблизи к приспособлению с модулем топливопровода
2. [Робот] Выставить высоту инструмента так, чтобы верхняя пластина 57 инструмента была бы выше верха гнездового модуля 192 топливопровода и так, чтобы средняя пластина 40 инструмента была ниже низа гнездового модуля 192 топливопровода
3. [Робот] Переместить Инструмент 30 к выравнивающим стойкам 50 инструмента приспособления на направляющие #7 и #8 приспособления. Обеспечить легкое касание стойками направляющих
4. [Инструмент] Активировать привод 54b B-гайки инструмента, чтобы установить стопорный механизм 63 далеко от приспособления 202.
5. [Инструмент] Выравнить шестигранник привода 54b B-гайки с шестигранником на фиттинге гнездового модуля 192 топливопровода
6. [Робот] Переместить инструмент 30 вверх, пока средняя пластина 40 инструмента не коснется нижней шпонки 234 приспособления.
7. [Инструмент] Активировать привод 54b B-гайки инструмента в «запирающем» направлении, пока стопорный механизм не зацепится (1 оборот)
8. [Робот] Переместить инструмент 30 вниз, пока гнездовой модуль 192 топливопровода (теперь прикрепленный к инструменту) не будет расположен ниже низа 206 приспособления.
9. [Робот] Переместить инструмент 30 непосредственно от приспособления 202
10. Готовность приступить к следующей задаче
Прикрепление Топливопровода
Предположим, что модуль 192 топливопровода установлен. Изображения фото или видеокамер 26, описанные для работы по удалению В-гайки, будет использованы и для этой работы, но здесь не описаны.
1. [Робот] Переместить инструмент 30 выше клапана 360 вблизи него
2. [Робот] Выравнить центр инструмента 30 с клапаном 360
3. [Робот] Выравнить инструмент 30 с плоскими зонами 376 области реакции на клапане
4. [Инструмент] Обеспечение открытия зажима 77
5. [Инструмент] Выравнить плоские зоны привода 96 клапана на инструменте с плоскими зонами привода клапана 374 на клапане 360
6. [Робот] Переместить инструмент 30 вниз, пока инструмент 30 полностью не посажен.
7. [Инструмент] Закрыть зажим 77
8. Готовность приступить к открытию клапана
Открытие Клапана
Предположим, что топливопровод 192 был присоединен к клапану 360 (и поэтому инструмент 30 все еще находится на клапане 360)
1. [Инструмент] Обеспечение закрытия зажима 77
2. [Инструмент] Активировать привод 54а клапана в «ослабляющем» направлении, пока привод 96 клапана не открылся на 1 оборот (= приблизительно 5 оборотов муфты 68).
3. Готовность приступить к дозаправке
Выполнение Дозаправки
Активировать систему дозаправки.
Закрытие Клапана
Предположим, что дозаправка закончена
1. [Инструмент] Обеспечение закрытия зажима 77
2. [Инструмент] Активировать привод 54а клапана в «затягивающем» направлении, пока привод 96 клапана полностью не закрыт (приблизительно 1 оборот привода клапана или 5 оборотов муфты 68).
3. [Инструмент] Активировать привод 54а клапана в «ослабляющем» направлении на маленький шаг, чтобы уменьшить силу на приводе 96 клапана.
4. Готовность приступить к отделению топливопровода
Отделение Топливопровода
Предположим, что клапан 360 закрыт
1. [Инструмент] Активировать привод 54b В-гайки в «ослабляющем» направлении, пока В-гайка 364 топливопровода полностью не отвинчена (приблизительно 5 оборотов)
2. [Робот] Приложить направленную вниз силу.
3. [Инструмент] Открыть зажим 77
4. [Робот] Переместить инструмент 30 вверх, пока он не освободится от клапана 360
5. [Робот] Переместить инструмент 30 далеко от клапана 360
6. Готовность приступить к следующей задаче
Хранение Модуля Топливопровода
1. [Робот] Переместить инструмент 30 близко к приспособлению 202
2. [Робот] Выставить высоту инструмента 30 так, чтобы верхняя пластина 57 инструмента была бы выше верха приспособление и так, чтобы верх модуля 192 топливопровода был ниже низа 206 приспособления.
3. [Робот] Переместить инструмент 30 к выравнивающим стойкам 50 инструмента приспособления на направляющие #7 и #8 приспособления. Обеспечить легкое касание стойками направляющих.
4. [Инструмент] Активировать привод 54b В-гайки инструмента, чтобы установить стопорный механизм далеко от приспособления 202.
5. [Робот] Переместить инструмент 30 вверх, пока средняя пластина 40 инструмента не коснется нижней шпонки 234 приспособления.
6. [Инструмент] Активировать привод 54b В-гайки инструмента в «отпирающем» направлении, пока стопорный механизм не расцепится (1 оборот).
7. [Робот] Переместить инструмент 30 вниз, пока средняя пластина 40 инструмента не будет ниже низа модуля 192 топливопровода.
8. [Робот] Переместить инструмент 30 непосредственно от приспособления 202.
9. Готовность приступить к следующей задаче
Установка Модуля В-гайки
(как описано выше)
Извлечение B-гайки
1. [Робот] Переместить инструмент 30 выше стоек 208 хранения B-гайки близко к ним
2. [Робот] Выравнить центр инструмента 30 со стойкой 208 хранения
3. [Робот] Выравнить инструмент 30 с плоскими зонами области реакции на стойках 208 хранения В-гайки
4. [Инструмент] Обеспечение открытия зажима 77
5. [Инструмент] Выравнить шестигранник на приводе 60 B-гайки с B-гайкой 364 на стойке 208 хранения
6. [Робот] Переместить инструмент 30 вниз, пока инструмент 30 полностью не посажен
7. [Инструмент] Закрыть зажим 77
8. [Инструмент] Активировать привод 60 B-гайки в «ослабляющем» направлении, пока В-гайка полностью не отвинчена (приблизительно 5 оборотов)
9. [Инструмент] Открыть зажим 77
10. [Робот] Переместить инструмент 30 вверх, пока он не освободится от стоек 208 хранения В-гайки
11. [Робот] Переместить инструмент 30 далеко от стойки 208 хранения В-гайки
12. Готовность приступить к следующей задаче
Замена В-гайки
Предположим, что модуль 198 B-гайки установлен, а B-гайка 364 была извлечена
1. [Робот] Переместить инструмент 30 выше клапана 360 близко к нему
2. [Робот] Выравнить центр инструмента 30 с клапаном 360
3. [Робот] Выравнить инструмент 30 с плоскими зонами области реакции на клапане 376
4. [Инструмент] Обеспечение открытие зажима 77
7. [Инструмент] Выравнить шестигранник на плоских зонах привода 96 клапана на инструменте с плоскими зонами привода 375 клапана на клапане.
8. [Робот] Переместить инструмент 30 вниз, пока инструмент 30 полностью не посажен
5. [Инструмент] Закрыть зажим 77
6. [Инструмент] Активировать привод 54b B-гайки в «затягивающем» направлении, пока B-гайка 364 полностью не завинчена (приблизительно 5 оборотов)
7. [Инструмент] Выравнить плоские зоны привода 96 клапана с плоскими зонами на B-гайки 364
8. [Инструмент] Открыть зажим 77
9. [Робот] Переместить инструмент 30 вверх, пока он не освободится от клапана 360
10. [Робот] Переместить инструмент 30 далеко от клапана 360
11. Готовность приступить к следующей задаче
Хранение Модуля В-гайки
(как описано выше)
Раскрытая здесь система дозаправки топливом спутника может содержать специализированный спутник дозаправки, запущенный непосредственно с Земли, на которой установлено устройство дозаправки топливом, включающее приспособление для инструмента, механизированную руку-манипулятор и различные инструменты. Такой специализированный спутник может содержать механизм стыковки космического корабля, такой как раскрыт в Патенте США №6969030, опубликованном 29 ноября 2005, который включен в этот документ полностью посредством ссылки. Устройство может быть модернизировано под любой подходящий спутник. Заправляющийся спутник с устройством дозаправки, установленным на нем, может быть перенесен на большем «корабле-носителе» и запущен оттуда или оставлен на орбитальной космической станции и запущен оттуда, когда это необходимо. Система находится под дистанционным управлением удаленно расположенным оператором, например, расположенным на Земле, на «корабле-носителе» или на орбитальной космической станции.
Хотя раскрытая здесь система была описана как дистанционная система дозаправки для выполнения дозаправки топливом спутников на орбите, как только топливо было исчерпано, должно быть понятно, что настоящая система может также использоваться для того, чтобы безопасно заправлять спутники до того, как они запущены в космос. В этом контексте во время процедуры заправки нет необходимости ни в каком непосредственном человеческом контакте, так как весь процесс может дистанционно управляться с безопасного расстояния. В этой ситуации заправка выполняется до герметизации тепловых защитных покрытий и монтажа клапанов с различным контровыми проволоками, так что их не нужно разрезать.
Как используется здесь, термины «содержит», «содержащий», «включающий» и «включает» должны рассматриваться как включающими и открытыми. Конкретно, когда используются в этом документе, термины «содержит», «содержащий», «включающий» и «включает» и их вариации означают указанные признаки, этапы или элементы, включенные в описанное изобретение. Эти термины не должны интерпретироваться, как исключающие наличие других признаков, этапов или элементов.
Предшествующее описание предпочтительных вариантов выполнения изобретения было представлено, чтобы проиллюстрировать принципы изобретения, а не ограничить изобретение конкретным проиллюстрированным вариантом выполнения. Предполагается, что область изобретения определяется всеми вариантами выполнения, охваченными следующей формулой изобретения и ее эквивалентами.
Реферат
Группа изобретений относится к орбитальной заправке космических аппаратов (КА), например искусственных спутников. Система дозаправки содержит обслуживаемый (14) и обслуживающий (12) КА со средствами транспортировки топлива из баков КА (12) в баки КА (14). Она также содержит клапанный инструмент (30) для соединения и отсоединения заправочного трубопровода (25) с отверстием (23) для горючего и с отверстием (27) для окислителя на соответствующих баках КА (12). Имеется механизм (16) позиционирования инструмента (рука-манипулятор, например, с двумя степенями свободы) с концевым исполнительным элементом (18). С помощью матрицы (26) датчиков определяются смещения между инструментом и отверстиями (23) и (27). Механизм (16) может захватывать, кроме (30), и другие инструменты, которые хранятся в контейнере (20). Система может быть автономной и/или дистанционно управляться оператором, находящимся в космосе или на Земле. Техническим результатом группы изобретений является обеспечение роботизированной (дистанционно контролируемой) дозаправки заранее не подготовленных спутников. 4 н. и 86 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Отсек компонентов дозаправки
Комментарии