Устройство для применения в космосе, система удаления мусора и способ удаления мусора - RU2678392C2
Код документа: RU2678392C2
Чертежи





Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для применения в космосе, системе удаления мусора, включающего в себя такое устройство для применения в космосе, способу удаления мусора и т.п.
Предпосылки создания изобретения
Известно, что в настоящее время на орбитах Земли в виде космического мусора находятся выполнившие программу полета или разрушившиеся искусственные спутники, запущенные ранее, фрагменты таких искусственных спутников и обломки верхних ступеней ракет, а также фрагменты, образовавшиеся вследствие взрыва или высокоскоростных столкновений. Столкновение этого космического мусора с функционирующими космическими станциями или искусственными спутниками во время выполнения программы полета может приводить к повреждению этих космических станций или искусственных спутников. Поэтому предлагаются различные технологии удаления этого мусора с орбит для последующего сжигания или сбора.
В предлагаемой технологии, например, космическому мусору микроскопических размеров придают с помощью плазменного окружения в космосе отрицательный заряд, а затем прикладывают электрическое поле в направлении, обеспечивающем замедление скорости мусора, снижение высоты орбиты вращения мусора и вход в атмосферу Земли с последующим удалением в результате сжигания (см. Патентный документ 1). В последние годы была предложена технология сбора космического мусора с использованием устройства для удаления мусора, снабженного оболочкой из нескольких слоев ткани с пеноматериалом внутри (см. Патентный документ 2). Согласно этой технологии космический мусор при соударении с оболочкой разбивается на множество осколков, которые захватываются и собираются пеноматериалом.
Список цитирования
Патентные документы
Патентный документ 1: JP 2010-069973 А
Патентный документ 2: JP 2011-168270 А
Сущность изобретения
Техническая проблема
Однако технологии, описываемые в Патентных документах 1 и 2, используются для сжигания и сбора космического мусора микроскопических размеров или космического мусора относительно небольших размеров и не подходят для удаления космического мусора относительно больших размеров. В области же удаления космического мусора относительно больших размеров в настоящее время накопилась масса сложных проблем, таких как отсутствие разработанной технологии обеспечения приближения к являющемуся целевым объектом мусору и технологии захвата и подавления вращения мусора, а также недостаточная экономическая эффективность процесса удаления.
Настоящее изобретение было создано с учетом вышеизложенных обстоятельств, и целью данного изобретения является создание системы удаления мусора, обеспечивающей возможность эффективного удаления космического мусора различных размеров, в том числе относительно больших размеров, а также устройства для применения в космосе, используемое в этой системе.
Решение проблемы
Для достижения указанной цели устройство для применения в космосе согласно настоящему изобретению включает в себя: блок приклеивания, предназначенный для приклеивания к целевому объекту, находящемуся в космическом пространстве; и приводной блок, предназначенный для получения движущей силы, причем это устройство для применения в космосе предназначено для транспортировки целевого объекта в заданное целевое положение в результате перемещения вместе с этим целевым объектом с помощью приводного блока в состоянии приклеивания к целевому объекту с помощью блока приклеивания. Материнский модуль, согласно настоящему изобретению, может являться носителем устройства для применения в космосе, и выполнен с возможностью выброса устройства для применения в космосе в космическое пространство.
При использовании такой конфигурации материнский модуль, осуществляющий перенос устройства для применения в космосе, запускается в космическое пространство и приближается к целевому объекту, после чего устройство для применения в космосе выбрасывается из материнского модуля в космическое пространство, приклеивается с помощью блока приклеивания к целевому объекту и в результате перемещения с помощью приводного блока обеспечивает транспортировку целевого объекта в заданное целевое положение. Поэтому, например, в случае, когда целевой объект представляет собой космический мусор, устройство для применения в космосе может обеспечивать транспортировку этого космического мусора в атмосферу для сжигания и удаления. При этом транспортировка космического мусора относительно больших размеров может осуществляться с использованием множества устройств для применения в космосе. Переполненная орбита характеризуется высокой частотой столкновений, а ее широкое использование позволяет сделать вывод о возможности запуска ракеты или спутника на эту орбиту и в будущем. Размещение материнского модуля на такой орбите обеспечивает возможность эффективного удаления мусора. В случае, когда целевой объект представляет собой спутник в нормальном состоянии, устройство для применения в космосе может транспортировать такой спутник в заданное целевое положение (например, в целевое положение на другой орбите), что позволяет решать в космическом пространстве самые различные задачи.
Устройство для применения в космосе согласно настоящему изобретению может не иметь в своем составе средства предотвращения вращения для предотвращения вращения целевого объекта.
В случае удаления мусора с использованием устройства для применения в космосе, согласно настоящему изобретению устройство для применения в космосе даже без предотвращения вращения мусора при приклеивании к мусору может вращаться вместе с этим мусором. Усилие, требуемое для выброса космического мусора в атмосферу, представляет собой усилие (тормозное усилие) для замедления космического мусора, и момент возможного приложения такого тормозного усилия к космическому мусору наступает даже при продолжении его вращения. Кроме того, в случае предложения услуги транспортировки спутника с использованием устройства для применения в космосе какая-либо необходимость в предотвращении вращения отсутствует, так как спутник в качестве целевого объекта не поддающегося контролю вращения не совершает. Поэтому средства предотвращения вращения устройству для применения в космосе не требуется, в результате чего появляется возможность уменьшения габаритных размеров этого устройства.
Устройство для применения в космосе, согласно настоящему изобретению, может включать в себя блок автономного управления, предназначенный для управления своими собственными положением и ориентацией. Материнский модуль может включать в себя блок управления дочерним модулем, предназначенным для управления положением и ориентацией устройства для применения в космосе.
Использование такой конфигурации обеспечивает возможность управления положением и ориентацией устройства для применения в космосе, что позволяет осуществлять приклеивание устройства для применения в космосе к целевому объекту совершенно беспрепятственно.
Система удаления мусора, согласно настоящему изобретению, предназначенная для удаления космического мусора, находящегося в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, включает в себя: блок управления наведением, выполненный с возможностью обеспечения перемещения устройства для применения в космосе в направлении приближения к космическому мусору и приклеивания устройства для применения в космосе к космическому мусору с помощью блока приклеивания; и блок управления движением, выполненный с возможностью управления приводным блоком устройства для применения в космосе с целью обеспечения перемещения устройства для применения в космосе в состоянии приклеивания к космическому мусору вместе с космическим мусором в сторону атмосферы с помощью приводного блока устройства для применения в космосе.
Способ для удаления мусора, согласно настоящему изобретению, обеспечивающий удаление космического мусора, находящегося в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, включает в себя: этап наведения, заключающийся в обеспечении перемещения устройства для применения в космосе в направлении приближения к космическому мусору; этап приклеивания, заключающийся в обеспечении приклеивания устройства для применения в космосе к космическому мусору с помощью блока приклеивания; и этап транспортировки, заключающийся в обеспечении перемещения устройства для применения в космосе в состоянии приклеивания к космическому мусору в сторону атмосферы с помощью приводного блока устройства для применения в космосе с целью транспортировки космического мусора в сторону атмосферы.
Использование такой конфигурации и такого способа обеспечивает возможность перемещения устройства для применения в космосе в направлении приближения к космическому мусору, приклеивания устройства для применения в космосе к космическому мусору с помощью блока приклеивания и перемещения устройства для применения в космосе в состоянии приклеивания к космическому мусору с помощью приводного блока устройства для применения в космосе с целью транспортировки космического мусора в атмосферу для сжигания и удаления или перемещения космического мусора на орбиту с низкой вероятностью столкновений (на орбиту захоронения). При этом транспортировка космического мусора относительно больших размеров может осуществляться с использованием множества устройств для применения в космосе.
Способ удаления мусора, согласно настоящему изобретению, может включать в себя этап получения информации о состоянии мусора, заключающийся в получении информации о форме, центре тяжести или массе космического мусора, о состоянии терморегулирования и/или состоянии вращения и т.д. космического мусора, осуществляемый после этапа наведения, но перед этапом приклеивания.
Использование такого способа обеспечивает возможность получения информации о форме и состоянии вращения космического мусора в период времени от перемещения устройства для применения в космосе в направлении приближения к космическому мусору до приклеивания устройства для применения в космосе к космическому мусору, а также получения информации о положении космического мусора в точке конечного приближения устройства для применения в космосе и направления возможного приклеивания устройства для применения в космосе к космическому мусору.
Способ удаления мусора, согласно настоящему изобретению, может дополнительно включать в себя этап управления мусором, заключающийся в управлении ориентацией космического мусора, осуществляемый после этапа приклеивания.
Использование такого способа позволяет контролировать ориентацию космического мусора после приклеивания устройства для применения в космосе к космическому мусору.
Система транспортировки спутника, согласно настоящему изобретению, предназначена для транспортировки спутника, находящегося на первой орбите в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, и включает в себя: блок управления наведением, выполненный с возможностью обеспечения перемещения устройства для применения в космосе в направлении приближения к спутнику и приклеивания устройства для применения в космосе к спутнику на первой орбите с помощью блока приклеивания; и блок управления движением, предназначенный для управления приводным блоком устройства для применения в космосе с целью обеспечения перемещения устройства для применения в космосе в состоянии приклеивания к спутнику вместе со спутником в сторону второй орбиты, отличной от первой орбиты, с помощью приводного блока устройства для применения в космосе.
Способ транспортировки спутника, согласно настоящему изобретению, предназначен для транспортировки спутника, находящегося на первой орбите в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, и включает в себя: этап наведения, заключающийся в обеспечении перемещения устройства для применения в космосе в направлении приближения к спутнику; этап приклеивания, заключающийся в обеспечении приклеивания устройства для применения в космосе к спутнику с помощью блока приклеивания; и этап транспортировки, заключающийся в обеспечении перемещения устройства для применения в космосе в состоянии приклеивания к спутнику вместе со спутником в сторону второй орбиты, отличной от первой орбиты, с помощью приводного блока устройства для применения в космосе и транспортировки спутника с первой орбиты на вторую орбиту.
Использование такой конфигурации и такого способа обеспечивает возможность перемещения устройства для применения в космосе в направлении приближения к спутнику, находящемуся первой орбите в космическом пространстве (например, на низкорасположенной орбите высотой 200-1000 км), приклеивания устройства для применения в космосе к спутнику с помощью блока приклеивания и перемещения устройства для применения в космосе с помощью приводного блока устройства для применения в космосе, с целью транспортировки спутника на вторую орбиту, отличную от первой орбиты. При этом спутник, находящийся на стационарной орбите в качестве первой орбиты, может быть транспортирован на орбиту захоронения (на орбиту большей высоты, чем стационарная орбита) в качестве второй орбиты.
Система транспортировки спутника, согласно настоящему изобретению, может включать в себя блок управления (блок автономного управления или блок управления дочерним модулем), предназначенный для управления ориентацией и положением устройства для применения в космосе с целью обеспечения приклеивания устройства для применения в космосе к спутнику на первой орбите с помощью блока приклеивания.
Возможность управления ориентацией и положением устройства для применения в космосе при использовании такой конфигурации позволяет обеспечить надежность приклеивания устройства для применения в космосе к спутнику на первой орбите.
Система управления спутником, согласно настоящему изобретению, предназначена для управления положением спутника, находящегося на стационарной орбите в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, и включает в себя: блок управления наведением, выполненный с возможностью обеспечения перемещения устройства для применения в космосе в направлении приближения к указанному спутнику на стационарной орбите и приклеивания устройства для применения в космосе к этому спутнику с помощью блока приклеивания; и блок управления движением, предназначенный для управления приводным блоком устройства для применения в космосе с целью обеспечения сохранения положения указанного спутника на стационарной орбите в состоянии приклеивания устройства для применения в космосе к этому спутнику.
Способ для управления спутником, согласно настоящему изобретению, предназначен для управления положением спутника, находящегося на стационарной орбите в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, и включает в себя: этап наведения, заключающийся в обеспечении перемещения устройства для применения в космосе в направлении приближения к спутнику; этап приклеивания, заключающийся в обеспечении приклеивания устройства для применения в космосе к спутнику с помощью блока приклеивания; и этап управления положением, заключающийся в управлении приводным блоком устройства для применения в космосе с целью сохранения положения указанного спутника на стационарной орбите в состоянии приклеивания устройства для применения в космосе к этому спутнику.
Использование такой конфигурации и такого способа обеспечивает возможность перемещения устройства для применения в космосе в направлении приближения к спутнику, находящемуся на стационарной орбите в космическом пространстве, и приклеивания устройства, для применения в космосе к спутнику с помощью блока приклеивания и управления приводным блоком устройства для применения в космосе с целью сохранения положения спутника на стационарной орбите (с целью сохранения орбиты).
Система удаления мусора, система транспортировки спутника и система управления спутником, согласно настоящему изобретению, могут включать в себя блок управления наведением, установленный на земле. В качестве блока управления движением может быть использован блок, установленный на земле, или блок, носителем которого является устройство для применения в космосе.
Устройство для применения в космосе (или материнский модуль), согласно настоящему изобретению, может быть выполнен с возможностью мониторинга состояния спутника, вращающегося по заданной орбите. При этом устройство для применения в космосе (или материнский модуль) может быть выполнен с возможностью подачи электропитания на спутник или с возможностью обеспечения спутника блоком перемещения.
При использовании такой конфигурации устройство для применения в космосе (или материнский модуль) может осуществлять мониторинг состояние спутника, вращающегося по заданной орбите, может подавать электропитание на спутник и может обеспечивать спутник блоком перемещения с целью обеспечения перемещения спутника с помощью блока перемещения, что позволяет предоставлять на орбите самые различные услуги.
Система мониторинга спутника, согласно настоящему изобретению, предназначена для мониторинга спутника, вращающегося по заданной орбите в космическом пространстве, с использованием устройства для применения в космосе или материнского модуля, описанного выше, и включает в себя: блок управления наведением, выполненный с возможностью обеспечения перемещения устройства для применения в космосе или материнского модуля в направлении приближения к спутнику; и блок управления мониторингом, выполненный с возможностью управления устройством для применения в космосе или материнским модулем с целью обеспечения мониторинга состояния спутника со стороны устройства для применения в космосе или материнского модуля.
Способ мониторинга спутника, согласно настоящему изобретению, предназначен для мониторинга спутника, вращающегося по заданной орбите в космическом пространстве, с использованием устройства для применения в космосе, описанного выше, и включает в себя: этап наведения, заключающийся в обеспечении перемещения устройства для применения в космосе или материнского модуля в направлении приближения к спутнику; и этап мониторинга, заключающийся в мониторинге состояния спутника со стороны устройства для применения в космосе или материнского модуля.
При такой конфигурации устройство для применения в космосе (или материнский модуль) может осуществлять мониторинг состояния спутника, вращающегося по заданной орбите.
Система мониторинга спутника, согласно настоящему изобретению, может включать в себя блок управления наведением, установленный на земле. В качестве блока управления мониторингом может быть использован блок, установленный на земле, или блок, носителем которого является устройство для применения в космосе.
Полезные эффекты изобретения
Настоящее изобретение позволяет создать систему удаления мусора с возможностью эффективного удаления космического мусора различных размеров, в том числе и относительно больших размеров, устройство для применения в космосе, используемое в этой системе.
Краткое описание чертежей
Фиг. 1 - функциональная блок-схема системы удаления мусора, согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 - блок-схема последовательности операций в способе удаления мусора с использованием системы удаления мусора на фиг. 1.
Фиг. 3 - блок-схема последовательности операций в способе транспортировки спутника, согласно одному варианту осуществления настоящего изобретения.
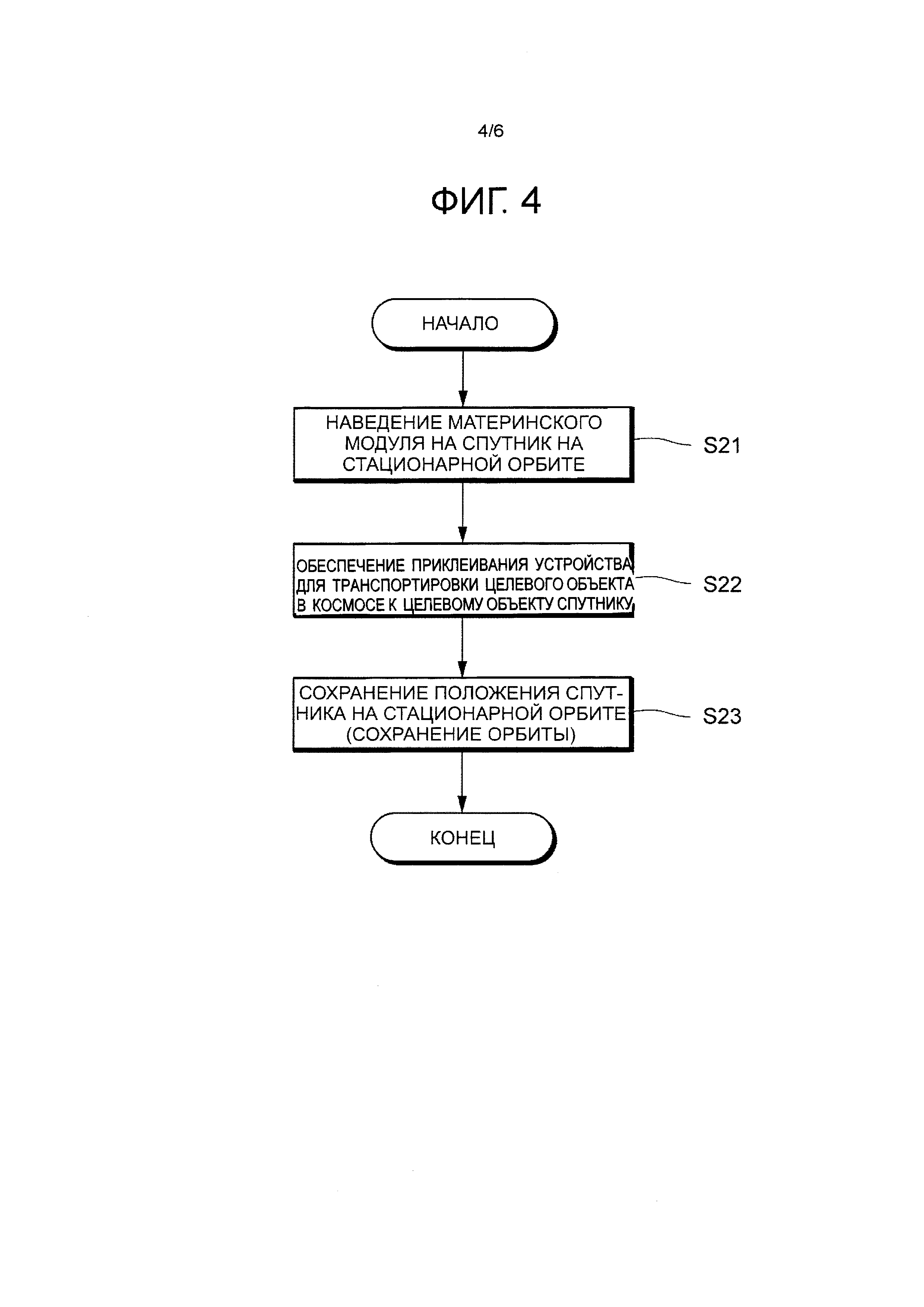
Фиг. 4 - блок-схема последовательности операций в способе управления спутником, согласно одному варианту осуществления настоящего изобретения.
Фиг. 5 - функциональная схема системы мониторинга спутника, согласно одному варианту осуществления настоящего изобретения.
Фиг. 6 - блок-схема последовательности операций в способе мониторинга спутника с использованием системы мониторинга спутника на фиг. 5.
Описание вариантов осуществления
Ниже со ссылками на чертежи приводится описание вариантов осуществления настоящего изобретения.
<Первый вариант осуществления>
Прежде всего со ссылками на фиг. 1 и 2 ниже приводится описание первого варианта осуществления настоящего изобретения. В первом варианте осуществления рассматриваются один пример системы удаления мусора согласно настоящему изобретению и один пример способа удаления мусора с использованием этой системы.
Прежде всего со ссылками на фиг. 1 приводится описание конфигурации системы 1 удаления мусора, согласно рассматриваемому варианту осуществления. Система 1 удаления мусора предназначена для удаления космического мусора, находящегося в космическом пространств, и, как показано на фиг. 1, включает в себя устройство 100 для применения в космосе (дочерний модуль), запускаемое в космическое пространство, материнский модуль 200, который может являться носителем устройства 100 для применения в космосе и выполнен с возможностью выброса устройства 100 для применения в космосе в космическое пространство, и блок 300 управления наведением, обеспечивающий наведение устройства 100 для применения в космосе на космический мусор.
Устройство 100, для применения в космосе, включает в себя блок 110 приклеивания, который приклеивается к целевому объекту, находящемуся в космическом пространстве, и приводной блок 120, предназначенный для получения движущей силы, и в результате приклеивания к целевому объекту с помощью блока 110 приклеивания и перемещения с помощью приводного блока 120 обеспечивает транспортировку целевого объекта в заданное целевое положение. В качестве блока 110 приклеивания в предпочтительном варианте используется клей с возможностью поглощения энергии столкновения с космическим мусором, обладающий клейкостью и способный выдерживать разность температур между космической средой и космическим мусором и не передавать теплоту на корпус устройства 100 для применения в космосе. Кроме того, в дополнение к такому клею в качестве вспомогательного средства для захвата космического мусора с помощью устройства 100 для применения в космосе может быть предусмотрен специальный механизм для механического удерживания космического мусора. В качестве приводного блока 120 может быть использован твердотопливный двигатель малой тяги, миниатюрный ионный двигатель малой тяги, цифровой двигатель малой тяги или т.п.
Устройство 100 для применения в космосе дополнительно содержит блок 130 автономного управления, предназначенный для управления своими собственными положением и ориентацией. В качестве блока 130 автономного управления может быть использован контроллер двигателя малой тяги или т.п., выполненный с возможностью управления корректирующим двигателем малой тяги, предназначенным для коррекции отклонения угла ориентации или положения, регистрируемого гиродатчиком или GPS.
Материнский модуль 200 выполнен с возможностью крепления на космическое транспортное средство, такое как ракета, являющееся носителем устройства 100 для применения в космосе, и запуска в космическое пространство. Материнский модуль 200 в рассматриваемом варианте осуществления включает в себя: блок 210 управления дочерним модулем, предназначенным для управления положением и ориентацией устройства 100 для применения в космосе; блок 220 выброса дочернего модуля, предназначенный для выброса устройства 100 для применения в космосе в космическое пространство, и блок 230 управления движением, предназначенным для управления приводным блоком 120 в составе устройства 100 для применения в космосе с целью транспортировки целевого объекта в заданное целевое положение.
В качестве блока 210 управления дочерним модулем может быть использован, контроллер двигателя малой тяги или т.п., выполненный с возможностью управления корректирующим двигателем малой тяги, предназначенным для коррекции отклонения угла ориентации или положения, регистрируемого GPS или астрокомпасом. В качестве блока 220 выброса дочернего модуля может быть использован исполнительный механизм или т.п., выполненный с возможностью приложения усилия к устройству 100 для применения в космосе в направлении выброса, а в качестве блока 230 управления движением - контроллер двигателя малой тяги или т.п., выполненный с возможностью управления двигателем малой тяги управления, то есть приводным блоком 120.
При этом может быть использован какой-либо один из блоков управления - блок 210 управления дочерним модулем в составе материнского модуля 200 или блок 130 автономного управления в составе устройства 100 для применения в космосе. В рассматриваемом варианте осуществления материнский модуль 200 является носителем множества устройств 100 для применения в космосе.
Блок 300 управления наведением установлен на базовой станции, размещенной на земле, и предназначен для перемещения устройства 100 для применения в космосе и материнского модуля 200 в направлении приближения к космическому мусору с использованием установленного средства связи. При этом на базовой станции, размещенной на земле, могут быть установлены различные контроллеры в составе материнского модуля 200 (блок 210 управления дочерним модулем и блок 230 управления движением), способные обеспечивать дистанционное управление устройством 100 для применения в космосе с базовой станции с использованием установленного средства связи.
Далее со ссылками на блок-схему последовательности операций на фиг. 2 приводится описание способа удаления мусора с использованием системы 1 удаления мусора, согласно рассматриваемому варианту осуществления.
Прежде всего, материнский модуль 200, являющийся носителем устройств 100 для применения в космосе, крепится на космическое транспортное средство и запускается в космическое пространство с целью перемещения материнского модуля 200 в направлении приближения к космическому мусору в качестве целевого объекта (этап наведения: S1). На этапе наведения S1, например, с использованием GPS-навигации материнский модуль 200 может быть перемещен в положение на относительно близком расстоянии от космического мусора в качестве целевого объекта (например, в положение на расстоянии нескольких километров от космического мусора), а использование, например, астрокомпаса или т.п. может позволить приблизить материнский модуль 200 на расстояние от нескольких десятков до сотен метров от космического мусора, после чего с помощью оптической камеры или т.п. возможно приближение материнского модуля 200 на несколько метров от космического мусора.
Далее устройства 100 для применения в космосе выбрасываются из материнского модуля 200 и при одновременном управлении ориентацией и положением устройств 100 для применения в космосе с помощью блоков 210 управления дочерними модулями (или с помощью блоков 130 автономного управления) обеспечивается приклеивание устройств 100 для применения в космосе к космическому мусору с помощью блоков 110 приклеивания, установленных на устройствах 100 для применения в космосе (этап приклеивания: S2). Затем в работу включается блок 230 управления движением, осуществляющий управление приводными блоками 120 устройств 100 для применения в космосе с целью транспортировки космического мусора в сторону атмосферу (этап транспортировки: S3), что позволяет космическому мусору войти в атмосферу для сжигания. При этом устройства 100 для применения в космосе сжигаются и уничтожаются вместе с космическим мусором.
В системе 1 удаления мусора согласно рассматриваемому варианту осуществления, описанному выше, материнский модуль 200, являющийся носителем устройств 100 для применения в космосе, перемещается в направлении приближения к космическому мусору, устройства 100 для применения в космосе выбрасываются из материнского модуля 200, обеспечивается приклеивание устройств 100 для применения в космосе к космическому мусору с помощью блоков 110 приклеивания и перемещение с помощью приводных блоков 120 устройств 100, для применения в космосе с целью транспортировки космического мусора в атмосферу для сжигания и удаления. При этом транспортировка космического мусора относительно больших размеров может осуществляться с использованием множества устройств 100 для применения в космосе.
В способе удаления мусора, согласно рассматриваемому варианту осуществления, описанному выше, рассмотрен пример с этапом приклеивания S2, следующим за этапом наведения S1, а между этапом наведения S1 и этапом приклеивания S2 может быть выполнен этап получения информации о состоянии мусора, заключающийся в получении информации о форме и/или состоянии вращения космического мусора. Использование такого этапа обеспечивает возможность получения информации о форме и состоянии вращения космического мусора в течение времени от перемещения материнского модуля 200 в направлении приближения к космическому мусору до выброса устройств 100 для применения в космическое пространство и за счет получения информации об оптимальном положении выброса или направлении выбора и последующего выполнения полета материнского модуля 200 на конечном участке траектории в оптимальных условиях позволяет осуществлять выброс и приклеивание с более высокой надежностью.
В способе удаления мусора согласно рассматриваемому варианту осуществления, описанному выше, рассмотрен пример с этапом транспортировки S3, следующим за этапом приклеивания S2, и между этапом приклеивания S2 и этапом транспортировки S3 может быть выполнен этап управления мусором, заключающийся в управлении ориентацией космического мусора. Использование такого этапа позволяет осуществлять управление ориентацией космического мусора после приклеивания устройств 100 для применения в космосе к космическому мусору.
<Второй вариант осуществления>
Далее со ссылками на фиг. 3 приводится описание второго варианта осуществления настоящего изобретения. Во втором варианте осуществления рассматриваются один пример спутниковой системы транспортировки согласно настоящему изобретению и один пример способа транспортировки спутника с использованием этой системы.
Система транспортировки спутника согласно рассматриваемому варианту осуществления предназначена для транспортировки спутника, находящегося в космическом пространстве. Так как система транспортировки спутника по конфигурации практически совпадает с системой 1 удаления мусора, описанной в первом варианте осуществления, подробного описания этой системы не приводится, и приводимое ниже описание относится к конфигурации, соответствующей первому варианту осуществления (к устройству 100 для применения в космосе, материнскому модулю 200 и т.п.).
Ниже со ссылками на блок-схему последовательности операций на фиг. 3 приводится описание способа транспортировки спутника с использованием системы транспортировки спутника согласно рассматриваемому варианту осуществления.
Прежде всего, материнский модуль 200, являющийся носителем устройств 100 для применения в космосе, крепится на космическое транспортное средство и запускается в космическое пространство с целью перемещения материнского модуля 200 в направлении приближения к спутнику в качестве целевого объекта (этап наведения: S11). На этапе наведения S11, например, с использованием абсолютной GPS-навигации материнский модуль 200 может быть перемещен в положение на относительно близком расстоянии от спутника, находящегося на первой орбите (например, в положение на расстоянии 10 километров от спутника), а использование, например, относительной GPS-навигации или астрокомпаса может позволить приблизить материнский модуль 200 на расстояние ста метров от спутника, после чего с помощью датчика близости, оптической камеры или т.п. возможно приближение материнского модуля 200 в положение на несколько метров от спутника.
Далее устройства 100 для применения в космосе выбрасываются из материнского модуля 200 и при одновременном управлении ориентацией и положением устройств 100 для применения в космосе с помощью блоков 210 управления дочерними модулями (или с помощью блоков 130 автономного управления) обеспечивается приклеивание устройств 100 для применения в космосе к спутнику с помощью блоков 110 приклеивания, установленных на устройствах 100 для применения в космосе (этап приклеивания: S12). Затем в работу включается блок 230 управления движением, осуществляющий управление приводными блоками 120 устройств 100 для применения в космосе с целью обеспечения перемещения устройств 100 для применения в космосе в сторону второй орбиты, отличной от первой орбиты, и транспортировки спутника на вторую орбиту (этап транспортировки: S13). В результате можно обеспечить перемещение спутника с первой орбиты на вторую. При этом устройства 100 для применения в космосе могут находиться вместе со спутником в состоянии приклеивания к спутнику.
В системе транспортировки спутника согласно варианту осуществления, описанному выше, материнский модуль 200, являющийся носителем устройств 100 для применения в космосе, перемещается в направлении приближения к спутнику, находящемуся на первой орбите (например, на низкорасположенной орбите высотой 200-1000 км), устройства 100 для применения в космосе выбрасываются из материнского модуля 200, обеспечивается приклеивание устройств 100 для применения в космосе к спутнику с помощью блоков 110 приклеивания и перемещение устройств 100 для применения в космосе с помощью приводных блоков 120 устройств 100 для применения в космосе с целью транспортировки спутника на вторую орбиту, отличную от первой орбиты.
<Третий вариант осуществления>
Далее со ссылками на фиг. 4 ниже приводится описание третьего варианта осуществления настоящего изобретения. В третьем варианте осуществления описываются один пример системы управления спутником согласно настоящему изобретению и один пример способа управления спутником с использованием этой системы.
Система управления спутником, согласно рассматриваемому варианту осуществления, предназначена для управления положением спутника, находящегося на стационарной орбите в космическом пространстве, с целью сохранения орбиты. Так как система управления спутником по конфигурации практически совпадает с системой 1 удаления мусора 1, описанной в первом варианте осуществления, подробного описания этой системы не приводится, и приводимое ниже описание относится к конфигурации, соответствующей первому варианту осуществления (к устройству 100 для применения в космосе, материнскому модулю 200 и т.п.).
Ниже со ссылками на блок-схему последовательности процесса на фиг. 4 приводится описание способа управления спутником с использованием системы управления спутником согласно рассматриваемому варианту осуществления.
Прежде всего материнский модуль 200, являющийся носителем устройств 100 для применения в космосе крепится на космическое транспортное средство и запускается в космическое пространство с целью перемещения материнского модуля 200 в направлении приближения к спутнику в качестве целевого объекта (этап наведения: S21). На этапе наведения S21, например, с использованием абсолютной GPS-навигации материнский модуль 200 может быть перемещен в положение на относительно близком расстоянии от спутника, находящегося на стационарной орбите (например, в положение на расстоянии 10 километров от спутника), а использование, например, относительной GPS-навигации или астрокомпаса может позволить приблизить материнский модуль 200 на расстояние ста метров от спутника, после чего с помощью датчика близости, оптической камеры или т.п. возможно приближение материнского модуля 200 в положение на несколько метров от спутника.
Далее устройства 100 для применения в космосе выбрасываются из материнского модуля 200, и при одновременном управлении ориентацией и положением устройств 100 для применения в космосе с помощью блоков 210 управления дочерними модулями (или с помощью блоков 130 автономного управления) обеспечивается приклеивание устройств 100 для применения в космосе к спутнику с помощью блоков 110 приклеивания, установленных на устройствах 100 для применения в космосе (этап приклеивания: S22). Затем в работу включается блок 230 управления движением, осуществляющий управление приводными блоками 120 устройств 100 для применения в космосе с целью сохранения положения спутника с приклеенными устройствами 100 для применения в космосе на стационарной орбите (этап управления положением: S23), что позволяет спутнику сохранять свое положение на стационарной орбите (обеспечивает возможность сохранения орбиты). И в этом случае устройства 100 для применения в космосе также могут находиться вместе со спутником в состоянии приклеивания к спутнику.
В системе управления спутником согласно варианту осуществления, описанному выше, материнский модуль 200, являющийся носителем устройств 100 для применения в космосе перемещается в направлении приближения к спутнику, находящемуся на стационарной орбите в космическом пространстве, устройства 100 для применения в космосе выбрасываются из материнского модуля 200, обеспечивается приклеивание устройств 100 для применения в космосе к спутнику с помощью блоков 110 приклеивания и управление приводными блоками 120 устройств 100 для применения в космосе с целью сохранения положения спутника на стационарной орбите (с целью сохранения орбиты).
<Четвертый вариант осуществления>
Далее со ссылками на фиг. 5 и 6 приводится описание четвертого варианта осуществления настоящего изобретения. В четвертом варианте осуществления рассматриваются один пример системы мониторинга спутника согласно настоящему изобретению и один пример способа мониторинга спутника с использованием этой системы.
Прежде всего со ссылками на фиг. 5 ниже приводится описание конфигурации системы 1А мониторинга спутника согласно рассматриваемому варианту осуществления. Система 1А мониторинга спутника, предназначенная для мониторинга спутника, вращающегося по заданной орбите в космическом пространстве, как показано на фиг. 5, включает в себя устройство 100А для применения в космосе, запускаемое в космическое пространство (дочерний модуль), материнский модуль 200А, который может являться носителем устройства 100А для применения в космосе и выполнен с возможностью выброса устройства 100А для применения в космосе в космическое пространство, и блок 300 управления наведением, обеспечивающий наведение устройства 100А для применения в космосе и материнского модуля 200А на спутник. Так как блок 300 управления наведением совпадает с соответствующим блоком в первом варианте осуществления, подробного описания этого блока не приводится.
Устройство 100А для применения в космосе включает в себя блок 110 приклеивания, который приклеивается к целевому объекту, находящемуся в космическом пространстве, приводной блок 120, предназначенный для получения движущей силы, блок 130 автономного управления, предназначенная для управления своими собственными положением и ориентацией, блок 140 получения изображения, предназначенный для получения информации в виде изображения целевого объекта, и блок 150 подачи электропитания, предназначенный для подачи электропитания на целевой объект. В рассматриваемом варианте осуществления материнский модуль 200А является носителем одного устройства 100А для применения в космосе, а материнский модуль 200А может являться носителем множества устройств 100А для применения в космосе.
Так как блок 110 приклеивания, приводной блок 120 и блок 130 автономного управления совпадают с соответствующими блоками в первом варианте осуществления, подробного описания этих блоков не приводится. В качестве блока 140 получения изображения может быть использован CMOS-датчик изображения (на основе комплементарных металл-оксидных полупроводников), CCD-датчик изображения (на основе приборов с зарядовой связью), EMCCD-датчик изображения (на основе ПЗС-приборов с умножением электронов) или т.п. В качестве блока 150 подачи электропитания может быть использован кабель или т.п., предназначенный для подачи электропитания от источника электропитания (от солнечной батареи, топливной ячейки, химической батареи или т.п.) на целевой объект.
Материнский модуль 200А выполнен с возможностью крепления на космическое транспортное средство, такое как ракета, являющееся носителем устройства 100 для применения в космосе, и запуска в космическое пространство. Материнский модуль 200А в рассматриваемом варианте осуществления включает в себя: блок 210 управления дочерним модулем, предназначенным для управления положением и ориентацией устройства 100А для применения в космосе; блок 220 выброса дочернего модуля, предназначенный для выброса устройства 100А для применения в космосе в космическое пространство, и блок 240 управления мониторингом, предназначенным для управления блоком 140 получения изображения в составе устройство 100А для применения в космосе с целью мониторинга состояния спутника.
Так как блок 210 управления дочерним модулем и блок 220 выброса дочернего модуля совпадают с соответствующими блоками в первом варианте осуществления, подробного описания этих блоков не приводится. В качестве блока 240 управления мониторингом может быть использован компьютер, включающий в себя блок управления, предназначенный для дистанционного управления блоком 140 получения изображения, блок обработки изображения, предназначенный для обработки изображения, полученного через блок 140 получения изображения, блок определения нарушения, предназначенный для определения возникновения или отсутствия нарушения по обработанному изображению, и т.п.
Блок управления мониторингом может быть установлен на базовой станции, размещенной на земле. В другом варианте изобретения блок управления мониторингом может быть установлен на устройстве 100А для применения в космосе, а блок получения изображения и блок подачи электропитания могут быть установлены на материнском модуле 200А. Для случая неисправности блока перемещения в составе спутника, являющегося целевым объектом, (например, двигателя малой тяги) на материнском модуле 200А или на устройстве 100А для применения в космосе может быть предусмотрен альтернативный блок перемещения.
Далее со ссылками на блок-схему последовательности процесса на фиг. 6 ниже приводится описание способа мониторинга спутника с использованием системы 1А мониторинга спутника согласно рассматриваемому варианту осуществления.
Прежде всего материнский модуль 200А, являющийся носителем устройства 100А для применения в космосе, крепится на космическом транспортном средстве и запускается в космос с целью перемещения материнского модуля 200А в направлении приближения к спутнику, являющемуся целевым объектом (этап наведения: S31). На этапе наведения S31, например, в результате использования GPS-навигации материнский модуль 200А может быть перемещен в положение на относительно близком расстоянии от спутника, находящегося на заданной орбите (например, в положение на расстоянии нескольких километров от спутника), а использование, например, астрокомпаса или т.п. позволяет переместить материнский модуль 200А в положение от нескольких десятков до сотен метров от спутника, после чего с помощью оптической камеры или т.п. возможно перемещение материнского модуля 200А в положение в нескольких метрах от спутника.
Далее устройство 100А для применения в космосе выбрасывается из материнского модуля 200А в сторону спутника и в результате одновременного управления ориентацией и положением устройства 100А для применения в космосе с помощью блока 210 управления дочерним модулем (или с помощью блока 130 автономного управления) обеспечивается дрейф устройства 100А для применения в космосе поблизости от спутника или приклеивание устройства 100А для применения в космосе к этому спутнику с помощью блока 110 приклеивания, установленного на устройстве 100А для применения в космосе (этап выброса дочернего модуля: S32). Далее с использованием блока 140 получения изображения устройства 100А для применения в космосе и блока 240 управления мониторингом материнского модуля 200А осуществляется мониторинг состояния спутника (этап мониторинга: S33). Затем с использованием блока 240 управления мониторингом материнского модуля 200А принимается решение о наличии или об отсутствии нарушений в системе электропитания спутника (этап определения нарушения в подаче электропитания: S34), и в случае принятия решения о нарушении в подаче электропитания спутника начинается подача электропитания от блока 150 подачи электропитания устройства 100А для применения в космосе на спутник (этап подачи электропитания: S35). В результате обеспечивается подача электропитания на спутник с нарушением в подаче электропитания и появляется возможность повторного использования этого спутника.
В описанной выше системе мониторинга спутника согласно рассматриваемому варианту осуществления устройство 100А для применения в космосе и материнский модуль 200А могут осуществлять мониторинг состояние спутника, вращающегося по заданной орбите.
В вариантах осуществления, описанных выше, в случае выброса всех устройств для применения в космосе из материнского модуля в сторону этого материнского модуля может быть запущено космическое транспортное средство, являющееся носителем нового устройства для применения в космосе, и из этого космического транспортного средства материнский модуль может быть загружен новым устройством для применения в космосе, что обеспечивает возможность долговременного использования материнского модуля без его уничтожения и позволяет снизить затраты на выполнение поставленной задачи.
Выше было приведено описание вариантов осуществления, в которых управление ориентацией и положением устройства для применения в космосе, выбрасываемого из материнского модуля, обеспечивается блоком управления дочерним модулем и блоком автономного управления, а приклеивание устройства для применения в космосе к целевому объекту (к космическому мусору или спутнику) после выброса из материнского модуля может обеспечиваться без управления ориентацией и положением устройства для применения в космосе.
В вариантах осуществления с первого по третий и в четвертом варианте осуществления рассмотрены примеры с использованием разных устройств для применения в космосе и материнского модуля. Однако, в конфигурации системы удаления мусора, системы транспортировки спутника, системы управления спутником и системы мониторинга спутника могут быть использованы и общее устройство для применения в космосе и материнский модуль, что позволяет с использованием общих устройства для применения в космосе и материнского модуля реализовать четыре услуги (удаление мусора, транспортировку спутника, сохранение орбиты спутника, мониторинг спутника) и, следовательно, использовать прибыль, извлекаемую из бизнеса по транспортировке спутника и из бизнеса по мониторингу спутника, на удаление мусора. Поэтому можно ожидать, что использование устройства для применения в космосе и материнского модуля согласно настоящему изобретению позволит решить задачу, связанную с задержкой удаления мусора вследствие финансовых затруднений (вследствие отсутствия спонсоров).
В вариантах осуществления, описанных выше, рассмотрен пример с предложением четырех отдельных услуг (удаление мусора, транспортировка спутника, сохранение орбиты спутника, мониторинг спутника) с использованием разных систем. Однако возможно и предложение непрерывной реализации этих четырех услуг с использованием общей системы с возможностью выполнения функций в качестве системы удаления мусора, система транспортировки спутника, система управления спутником и системы мониторинга спутника. Например, после транспортировки спутника с заданной низкорасположенной орбиты на стационарную орбиту с использованием общей системы, выполняющей функции в качестве системы транспортировки спутника, при одновременном сохранении положения спутника на стационарной орбите с использованием общей системой, выполняющей функции в качестве системы управления спутником, возможно и осуществление мониторинга спутника на стационарной орбите с использованием общей системы, выполняющей функции в качестве системы мониторинга спутника, а в случае выхода спутника из строя этот вышедший из строя спутник может быть транспортирован в атмосферу с использованием общей системы, выполняющей функции в качестве системы удаления мусора для сжигания и удаления.
Кроме того, в вариантах осуществления, описанных выше, рассмотрен пример с предложением четырех услуг (удаление мусора, транспортировка спутника, сохранение орбиты спутника, мониторинг спутника) с использованием разных систем. Однако за счет установки средства ремонта (например, манипулятора робота) в устройстве 100А для применения в космосе и на материнском модуле 200А системы 1А мониторинга спутника, для ремонта сломанной детали спутника возможно и предложение услуги ремонта спутника.
Кроме того, в вариантах осуществления, описанных выше, рассмотрены примеры с транспортировкой целевого объекта (космического мусора или спутника) в состоянии приклеивания к устройству для применения в космосе с помощью блока приклеивания или с сохранением орбиты такого целевого объекта. Однако возможно и использование другой конфигурации для обеспечения отделения устройства для применения в космосе от целевого объекта по окончании выполнения заданной задачи (транспортировки или сохранения орбиты). Например, возможна установка выступа в форме штока, выступающего из центра слоя клея в качестве блока приклеивания в сторону целевого объекта, и обеспечение приклеивания устройство для применения в космосе к целевому блоку с помощью блока приклеивания. Выдвижение этого выступа в сторону целевого объекта по окончании выполнения заданной задачи позволяет осуществить отклеивание целевого объекта и отделение устройства для применения в космосе от целевого объекта, после чего устройство для применения в космосе может быть возвращено в атмосферу для разрушения или перемещения на орбиту захоронения. Так как существующие спутники, как правило, разработаны с возможностью исключительно автономного управления, то любое ненужное устройство для использования в космосе в предпочтительном варианте должно отделяться от этих спутников. При этом использование блока приклеивания простого механизма (выступа) обеспечивает возможность беспрепятственного отделения устройства для применения в космосе от целевого объекта.
Настоящее изобретение не ограничивается вариантами осуществления, описанными выше, и предполагается возможность модификаций со стороны специалистов в данной области техники в пределах признаков настоящего изобретения. То есть каждый элемент в рассмотренных выше вариантах осуществления и размещение этих элементов, материалы, условия, формы, размеры и т.д. не ограничиваются описанными выше и возможно внесение соответствующих изменений. Возможно также объединение любых элементов в этих вариантах осуществления в случае технической возможности такой комбинации, и такая комбинация также может быть включена в объем настоящего изобретения в пределах признаков настоящего изобретения.
Список ссылочных позиций
1 - система удаления мусора (система транспортировки спутника, система управления спутником),
1А - система мониторинга спутника,
100, 100А - устройство для применения в космосе,
110 - блок приклеивания,
120 - приводной блок,
130 - блок автономного управления,
200, 200А - материнский модуль,
210 - блок управления дочерним модулем,
220 - блок выброса дочернего модуля,
230 - блок управления движением,
240 - блок управления мониторингом,
300 - блок управления наведением,
S1, S11, S21, S31 - этап наведения,
S2, S12, S22 - этап приклеивания,
S3, S13 - этап транспортировки,
S23 - этап управления положением,
S33 - этап мониторинга
Реферат
Группа изобретений относится к космической технике. Устройство 100 для транспортировки целевого объекта в космосе включает в себя блок 110 приклеивания, предназначенный для приклеивания к целевому объекту в космическом пространстве, и приводной блок 120, предназначенный для получения движущей силы. В результате перемещения вместе с целевым объектом с помощью приводного блока 120 в состоянии приклеивания к целевому объекту с помощью блока 110 приклеивания осуществляется транспортировка целевого объекта в заданное целевое положение. Система удаления мусора включает в себя блок 300 управления наведением, выполненный с возможностью обеспечения перемещения устройства 100 в направлении приближения к космическому мусору и приклеивания устройства 100 к космическому мусору с помощью блока 110 приклеивания, и блок 230 управления движением, выполненный с возможностью управления приводным блоком 120 устройства 100 с целью обеспечения перемещения устройства 100 в состоянии приклеивания к космическому мусору вместе с космическим мусором в сторону атмосферы с помощью приводного блока 120 устройства 100. Техническим результатом группы изобретений является обеспечение эффективного удаления космического мусора различных размеров. 9 н. и 10 з.п. ф-лы, 6 ил.
Комментарии