Усовершенствование космических аппаратов дистанционного зондирования или связи - RU2199803C2
Код документа: RU2199803C2
Чертежи









Описание
Изобретение относится к космическим аппаратам. Далее в тексте описания изобретение будет раскрыто на примере космического аппарата дистанционного зондирования, оснащенного радиолокационной аппаратурой наблюдения.
Из описания будет понятно, что оно может быть с равным успехом применено и к спутникам связи.
Кроме того, изобретение описывается на примере спутника, находящегося на околоземной орбите. Тем не менее, оно может быть применено и для других небесных тел.
Описание уровня техники
Как показано на фиг.1-3, космический аппарат с радиолокационной аппаратурой содержит прямоугольную плоскую антенну 1, аппаратурный модуль 2 и панели 3
солнечной батареи.
Панели 3 солнечной батареи ориентируются по направлению к солнцу S, а антенна 1 ориентируется в направлении Земли Т и формирует изображения в стороне от вектора скорости V космического аппарата ( прим.: РЛС бокового обзора).
Далее приведены различные характеристики космических аппаратов такого типа.
Размеры антенны
радиолокационной системы
Размер антенны 1 в направлении вектора скорости V ИСЗ, т.е. ее длина на фиг. 3, непосредственно определяет разрешающую способность изображений вдоль той же самой оси
(азимутальное или доплеровское разрешение), причем соотношение, связывающее длину антенны и разрешение, составляет от 1,1 до 2.
Высота Н антенны 1 перпендикулярно вектору скорости V ИСЗ прямо пропорционально связана с полосой захвата изображения (шириной изображения на земной поверхности в направлении, перпендикулярном вектору скорости), максимальным углом падения (углом между линией визирования и вертикалью из наблюдаемой точки на земной поверхности) и высотой, а также обратно пропорционально связана с длиной L. Кроме того, для данных значений приведенных параметров высота прямо пропорциональна длине волны радиолокационной системы (РЛС).
Соответственно, в РЛС с низким разрешением (<10м) используются антенны, вытянутые вдоль вектора скорости ИСЗ (L=15 м, Н=1,5м в случае ИСЗ RADARSAT), а в радиолокационных системах высокого разрешения (<5 м ) высота Н намного превышает длину L, особенно в случае работы на низких частотах (в L- или S -диапазоне) или при работе на нескольких частотах с антеннами, надставленными друг над другом по высоте Н.
Наклонение вдоль оси вращения
Как показано на фиг.3, поворот линии визирования
луча антенны 1 вокруг оси вращения (roll, крена) ИСЗ позволяет получать изображения участков местности, более или менее удаленных от вертикальной линии, проходящей через ИСЗ (покрытие диапазона углов
падения). Такой поворот в настоящее время обеспечивается путем электронного сканирования в пределах между двумя углами падения i min и i max, причем для ограничения диапазона сканирования и высоты
антенны 1 последняя ориентируется таким образом, что ее нормаль N нацелена по медиане сектора углов падения. Угол

Мощность и местное время пересечения экватора
В отличие от дистанционного зондирования с использованием оптических
систем наблюдения, при дистанционном зондировании с применением радиолокационных систем не выдвигается никаких конкретных требований к освещенности Солнцем наблюдаемого участка на земной поверхности.
С другой стороны, при радиолокационном наблюдении происходит существенный расход электроэнергии космического аппарата. Все это приводит к необходимости выведения ИСЗ на солнечно-синхронную орбиту с
местным временем (пересечения экватора) 6 ч (в восходящем узле) или 18 ч (в нисходящем узле), что позволяет панелям 3 солнечной батареи космического аппарата оставаться освещенными Солнцем и
вырабатывать электроэнергию практически непрерывно (солнечные батареи мало находятся в тени Земли, в отличие от орбит с дневным местным временем (пересечения экватора), используемых для выведения
космических аппаратов дистанционного зондирования с оптической аппаратурой (фиг.1).
Мощности солнечной батареи, состоящей из панелей 3, обычно не достаточно для питания бортовой РЛС. На спутнике также устанавливаются аккумуляторные батареи, из которых черпает энергию бортовая РЛС. Эти аккумуляторные батареи подзаряжаются, когда РЛС не работает.
Отметим, что такой подход является также результатом того, что спутники с радиолокационной съемочной аппаратурой используют аппаратурные модули, которые не разрабатываются для них специально и поэтому являются совместимыми с дневными орбитами, на которых требуются большие солнечные батареи, приспособленные для выработки электроэнергии при длительном нахождении в тени Земли.
Стабильность
размеров и положения
Для нормальной работы антенна 1 должна оставаться плоской и сохранять точную ориентацию оси N, нормальной ее поверхности. Обычный подход заключается в наложении строгих
требований к механической стабильности размеров при сборке антенны 1 и аппаратурного модуля 2, а также в оснащении космического аппарата системой ориентации аппаратурного модуля 2, обеспечивающего
выполнение требований по наведению антенны.
В недавнем времени было предложено в случае использования антенн 1 с электронным сканированием ослаблять требования к плоскости поверхности и положению антенной панели и управлять фазовращателями антенных элементов, составляющих антенну 1, для восстановления правильно ориентированного идеального фронта волны. Это позволяет снизить конструктивные ограничения, налагаемые на космический аппарат и антенну, а система управления модулем 2 может быть относительно грубой.
Данный принцип децентрализованной адаптации на уровне антенны 1 основывается, по существу, на возможности измерения ее отклонений по плоскости поверхности и ориентации относительно ее средней плоскости.
Тем не менее, до сих пор предлагавшиеся подходы, основанные на использовании датчиков деформаций или плоскостных датчиков (особенно оптических датчиков), не являлись полностью удовлетворительными. Более того, они не позволяют измерять положение опорной рамы антенны 1, которое измеряется относительно аппаратурного модуля или измеряется при помощи датчиков абсолютного положения, установленных на антенне 1.
Независимо от того, как может развиваться техника децентрализованной адаптации, система ориентации аппаратурного модуля 2 по-прежнему остается ответственной за поддержание опорного положения антенны 1. В частности, ось вдоль большего габаритного размера (наименьшей инерции) должна выравниваться с вектором скорости (с длиной L для радиолокационных систем низкого разрешения) или перпендикулярно вектору скорости с углом вращения, как было описано ранее (размер Н для РЛС высокого разрешения), таким, что аппаратурный модуль может непрерывно компенсировать возникающие гравитационные моменты. Эта компенсация достигается непрерывным приложением моментов от системы ориентации, а также минимальной механической жесткостью космического аппарата, в целом, и механизмов развертывания антенны для передачи этих моментов. Отметим также, что наличие аппаратурного модуля 2 вносит свои собственные ограничения на инерцию и, при действии солнечного давления на панели 3 солнечной батареи, - другое распределение моментов.
Краткое изложение сущности изобретения
Изобретение используется на космических аппаратах нового типа, в частности на космических аппаратах
дистанционного зондирования Земли и связи.
Одной целью настоящего изобретения является разработка космического аппарата с улучшенной чувствительностью по сравнению с известными космическими аппаратами, обеспечивающего лучшие функциональные характеристики с точки зрения доступности и повторяемости.
Другой целью настоящего изобретения является разработка космического аппарата упрощенной конструкции, позволяющего, в частности, значительно снизить стоимость антенны, средства вывода и аппаратурного модуля при повышении надежности и продолжительности функционирования.
Для этого в изобретении предложен низкоорбитальный космический аппарат дистанционного зондирования Земли или связи, содержащий плоский, как правило, образующий антенну элемент, и отличающийся тем, что образующий антенну элемент лежит, по существу, в плоскости, проходящей через центр Земли, например в орбитальной плоскости космического аппарата.
В соответствии с другой независимой особенностью в изобретении предложен космический аппарат, который содержит солнечную батарею и ячейки солнечной батареи, установленные на образующем антенну элементе.
Предложенный в изобретении космический аппарат, преимущественно, выполняется так, чтобы высота образующего антенну элемента, определяемая размером вдоль гравитационной оси, превышала размер, перпендикулярный этой оси, в результате чего вышеупомянутый космический аппарат естественным образом стабилизировался по осям вращения и тангажа при помощи гравитационного градиента.
В частности, образующий антенну элемент частично, хотя и не обязательно, может состоять из пустой части, не выполняющей функций антенны, которая способствует естественной стабилизации вышеупомянутого космического аппарата по осям вращения и тангажа посредством гравитационного градиента.
В соответствии с одной независимой особенностью в изобретении предлагается космический аппарат дистанционного зондирования или связи, содержащий плоский, как правило, образующий антенну элемент, отличающийся тем, что образующий антенну элемент имеет деформируемую геометрию и содержит средства управления принимаемой или передаваемой электромагнитной волной, распределенные по его поверхности, а также тем, что он содержит множество датчиков положения и/или деформации и/или неровностей, распределенных по вышеупомянутому образующему антенну элементу и обеспечивающих измерение деформаций и/или неровностей с их последующей компенсацией при помощи управляющего средства.
Датчики предпочтительно являются земными или спутниковыми датчиками радиоместоопределения, например датчиками приема сигналов системы GPS, которые позволяют также измерять ошибки абсолютного положения с их последующей компенсацией при помощи управляющего средства.
В соответствии с другой, также независимой особенностью в изобретении предложена стартовая ступень космического аппарата дистанционного зондирования или связи, включающая по меньшей мере один плоский элемент, собранный из множества панелей, шарнирно связанных друг с другом, типа образующего антенну элемента, а также целевых аппаратурных блоков или служебных аппаратурных блоков, отличающаяся тем, что вышеупомянутый космический аппарат содержит поддерживающую оболочку, внутри которой во время запуска укладываются аппаратурные блоки и панели и которая оснащена пиротехническим отделителем, пиротехническим патроном для развертывания панелей.
В соответствии с первым предпочтительным вариантом воплощения изобретения поддерживающая оболочка состоит из двух полуоболочек, одна из которых объединена с различными служебными и целевыми аппаратурными блоками, а на другой размещен пиротехнический отделитель, представляющий собой отделитель с двумя створками, взрыв которого очерчивает и выбрасывает две створки, которые затем удерживаются открытыми при помощи двух шарниров, расположенных вдоль границы раздела с первой полуоболочкой, в результате чего панели могут быть уложены при запуске в корпус, образованный между оболочками, а затем развернуты только с одной стороны космического аппарата при помощи отделителя.
В соответствии с другим возможным вариантом воплощения изобретения поддерживающая оболочка составлена из двух полуоболочек, собранных на срединной части, причем срединная часть объединяет различные целевые и служебные аппаратурные блоки, а на каждой из полуоболочек установлен пиротехнический отделитель, представляющий собой отделитель с двумя створками, взрыв которого очерчивает и выбрасывает две створки, которые затем удерживаются открытыми при помощи двух шарниров, расположенных на той же полуоболочке и размещенных вдоль границы раздела со срединной частью, в результате чего панели могут быть уложены при запуске в два корпуса, образующиеся между каждой из боковых оболочек и срединной частью, а затем развернуты с каждой стороны космического аппарата при помощи соответствующего отделителя.
Космический аппарат, имеющий различные
приведенные выше признаки по отдельности или в совокупности, предпочтительно выполняется при помощи различных приведенных далее признаков, также взятых по отдельности или в любой из технически
выполнимых комбинаций:
- образующий антенну элемент выполняет антенные функции обеими своими сторонами;
- одна часть образующего антенну элемента не содержит ячеек солнечной батареи
и действует как антенна с обеих сторон;
- он (космический аппарат) содержит средство для дифференциальной обработки фазовых измерений по сигналам радиоместоопределения, поступающим с каждого
датчика, для измерения относительного положения датчиков и абсолютной ориентации средней плоскости, заданной датчиками;
- он содержит аппаратурный модуль, пересекающий плоскость орбиты, а
образующий антенну элемент размещен только с одной стороны вышеупомянутого аппаратурного модуля;
- он содержит аппаратурный модуль, пересекающий плоскость орбиты, а образующий антенну элемент
простирается по обе стороны от аппаратурного модуля;
- две части образующего антенну элемента находятся в двух различных плоскостях, пересечение которых проходит через центр Земли;
- он содержит аппаратурный модуль, центр масс которого находится на кратчайшей оси инерции образующего антенну элемента, в результате чего усиливается естественное уравновешивание, обусловленное
гравитационным градиентом вдоль местной вертикали образующего антенну элемента, и в результате чего снижаются моменты солнечного давления на космический аппарат;
- для антенны или антенн
элемента обеспечивается минимальное маскирование аппаратурным модулем, а для датчиков радиоместоопределения обеспечивается минимальный угловой сдвиг направления приема сигналов радиоместоопределения
относительно нормали к элементу среди угловых сдвигов, при которых не возникает многолучевости из-за отражений от модуля и за пределами которых сигналы игнорируются;
- ячейки солнечной
батареи покрывают энергетические требования по меньшей мере одной антенны образующего антенну элемента;
- часть образующего антенну элемента не выполняет антенных функций и несет ячейки
солнечной батареи;
- ячейки солнечной батареи, покрывающие энергетические требования вышеупомянутой антенны, размещают на обратной стороне этой антенны и, хотя и не обязательно, на участках,
не выполняющих антенные функции, на любой из сторон вышеупомянутой антенны;
- ячейки солнечной батареи образующего антенну элемента покрывают энергетические требования последнего;
- часть частей, не выполняющих антенные функции и несущих ячейки солнечной батареи, обеспечивают по меньшей мере выработку энергии для аппаратурного модуля, когда ИСЗ не находится в тени Земли;
- антенна отличается решеткой из связанных электронных поверхностных элементов, выполненных непосредственно в виде блока из одной или нескольких ячеек солнечной батареи;
- блок ячеек
солнечной батареи находится непосредственно на лицевой панели поверхностного элемента;
- ячейки солнечной батареи являются ячейками, использующими арсенид-галлиевые или кремниевые структуры;
- образующий антенну элемент содержит множество различных антенн, работающих на одной или на разных частотах и надставленных друг над другом вдоль гравитационной оси;
- образующий
антенну элемент содержит две антенны на одну частоту, позволяющие проводить интерферометрические радиолокационные дистанционные наблюдения, причем эти антенны разнесены по местной вертикальной оси;
- во время запуска панели сложены и прижаты к плите, к которой они прикрепляются при помощи стяжек;
- в одной по меньшей мере втулке выполнен проход для стяжки для ее крепления к плите,
проходя через каждую панель;
- кратчайшая ось инерции поддерживающей оболочки и различных панелей при запуске ориентирована вдоль оси средства вывода, а ось развертывания перпендикулярна оси
средства вывода;
- внешняя форма поддерживающей оболочки в стартовой ступени выбирается с учетом аэродинамических требований для того, чтобы заменить обтекатель полезной нагрузки;
- поддерживающая оболочка, а также блоки целевого и служебного оборудования составляют аппаратурный модуль, причем кратчайшая ось инерции последнего параллельна плоскости орбиты;
- развертывание осуществляется в вертикальном направлении;
- панель имеет многослойную структуру, включающую необязательный обтекатель, излучающую панель, промежуточную конструкцию NIDA
(торговый знак), содержащую электронное оборудование, необязательный слой тепловой защиты, плиту, на которой установлены ячейки солнечной батареи и/или излучающие элементы, кроме того, панель содержит
ребра жесткости, предусмотренные в промежуточной конструкции для поддержки плиты или плит, на которых установлены ячейки солнечной батареи и/или излучающие элементы;
- втулка размещена вблизи
пересечения двух ребер жесткости;
- все участки элемента, отличающиеся по своим антенным функциям, либо отличающиеся наличием или отсутствием антенных функций, расположены вдоль оси
развертывания панелей с тем, чтобы каждая из панелей имела высокий уровень функциональной однородности;
- питание высокочастотной распределительной системы осуществляется по гирляндной схеме
со стороны образующего антенну элемента, противоположной небесному телу, вокруг которого движется по орбите космический аппарат, причем кабель гирляндной схемы составляет часть необходимых линий
задержки;
- на спутнике по высоте антенны имеется решетка точек для управления углом места диаграммы антенны, причем элементарная диаграмма по углу места части антенны, связанная с каждой
точкой управления, ориентирована фиксированным образом для покрытия диаграммы падения (incidence envelope), а расстояние между этими точками по высоте Н выбирается таким, чтобы боковые лепестки
решетки существовали во время переориентации основного лепестка в отношении направления, в котором наведена элементарная диаграмма, но модуляция коэффициента усиления этих боковых лепестков, вызванная
элементарной диаграммой, гарантировала весьма низкий коэффициент усиления для тех лепестков, которые могут оказаться направленными к Земле, и поддерживала минимальный коэффициент усиления основного
лепестка;
- элементарный участок антенны, связанный с каждой точкой управления, составлен параллельной группировкой из общей точки управления и в направлении высоты множества излучающих
элементов, а также в направлении, в котором между излучающими элементами одной точки управления вводится постоянный профиль сдвига фазы с фиксированным линейным изменением.
Другие признаки и преимущества изобретения далее раскрываются с использованием описания, играющего исключительно иллюстративную и неограничивающую роль.
Краткое описание чертежей
Фиг.1 - схематическое изображение космического аппарата в соответствии с ранее описанным известным уровнем техники;
фиг. 2 - иллюстрация ориентации космического аппарата, согласно фиг.1,
находящегося на солнечно-синхронной околоземной орбите с местным временем 6 ч/18 ч, в случае расположения антенны в плоскости орбиты;
фиг. 3 - схематическое изображение ориентации антенны
космического аппарата, показанного на фиг.1 и 2;
фиг. 4 - схематический вид сбоку одного варианта воплощения космического аппарата в соответствии с изобретением в случае его размещения на
солнечно-синхронной орбите с местным временем 6 ч /18 ч и ориентации антенны в плоскости орбиты;
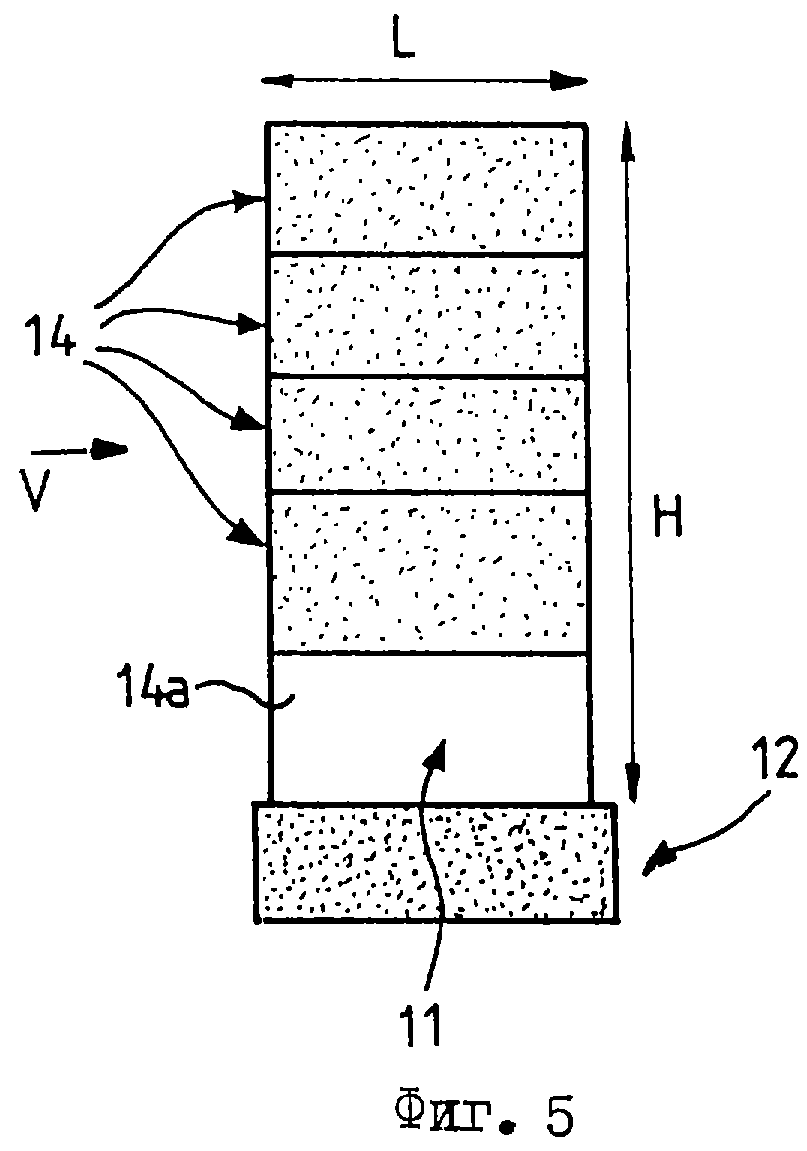
фиг.5 - вид спереди космического аппарата, показанного на фиг.4;
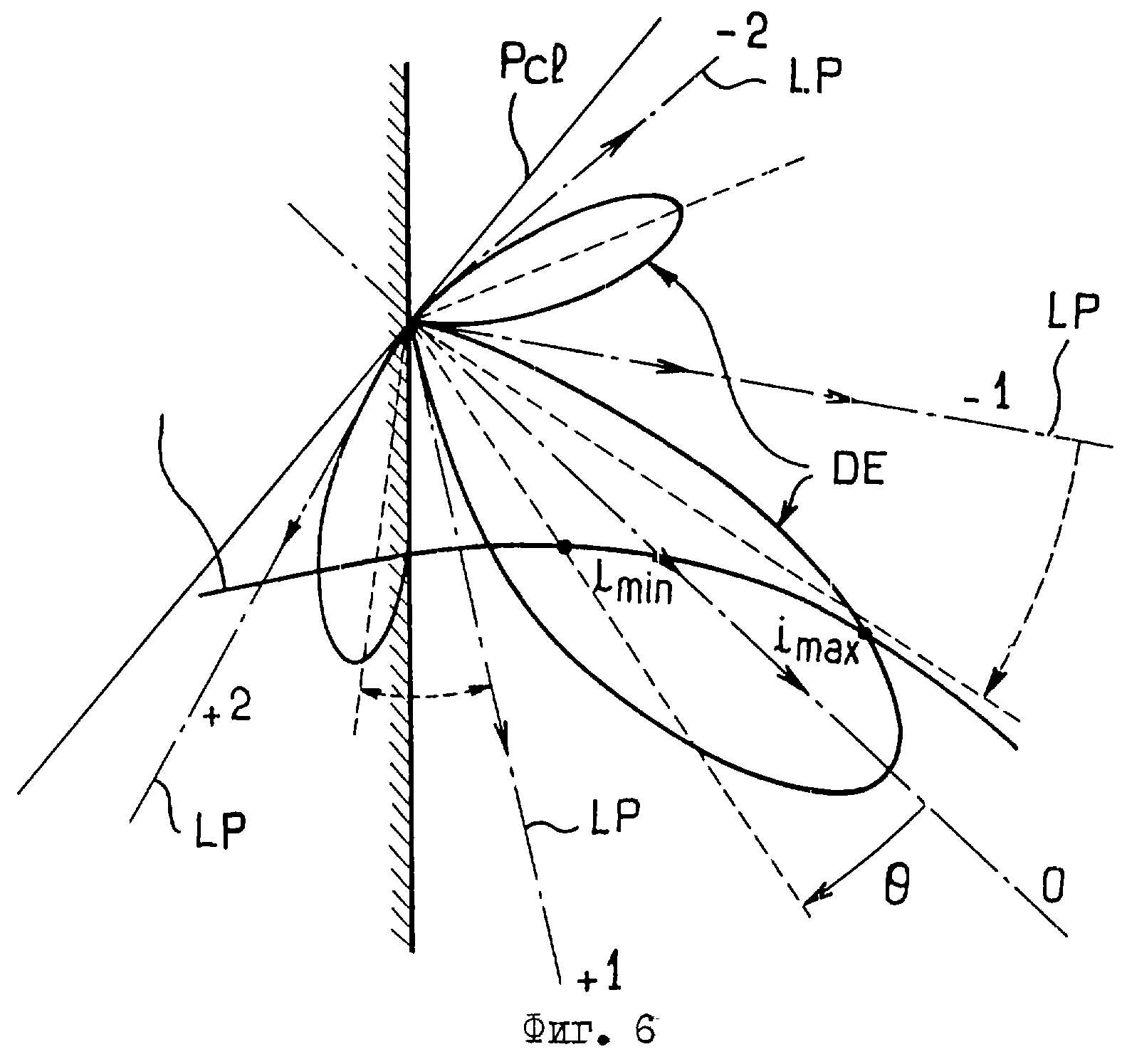
фиг. 6 - сечение по
углу места (в вертикальной плоскости) диаграммы направленности участка элементарной антенны, связанного с точкой управления;
фиг. 7 иллюстрирует один возможный вариант воплощения для
получения диаграммы, представленной на фиг.6;
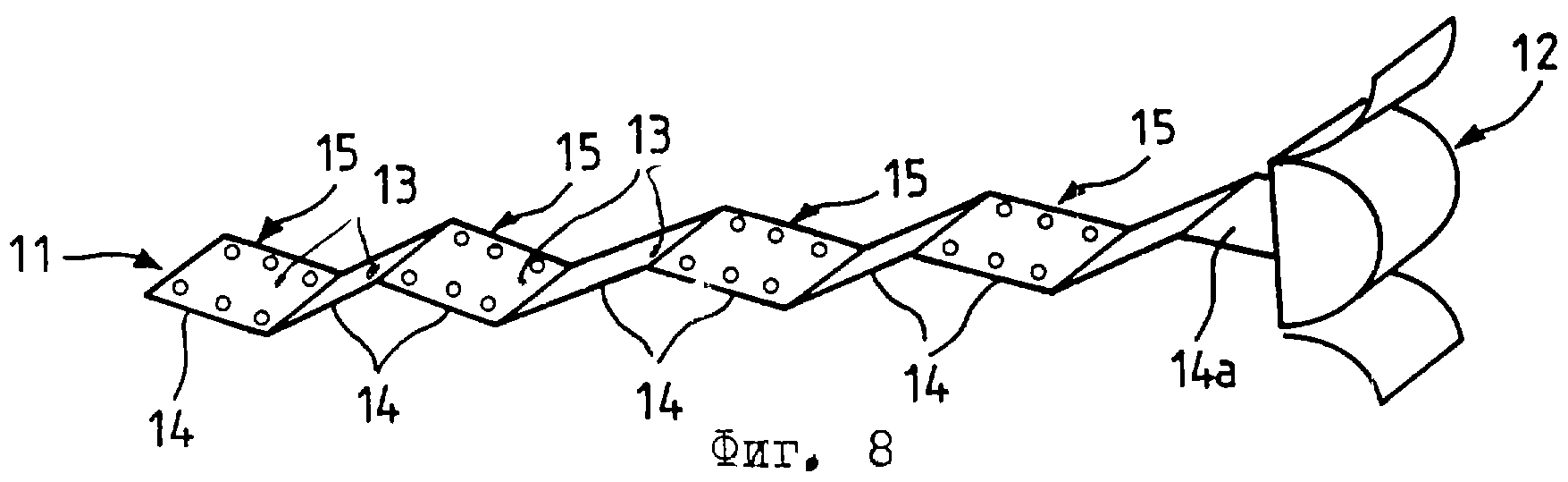
фиг. 8 - перспективный вид одного варианта реализации космического аппарата в соответствии с изобретением;
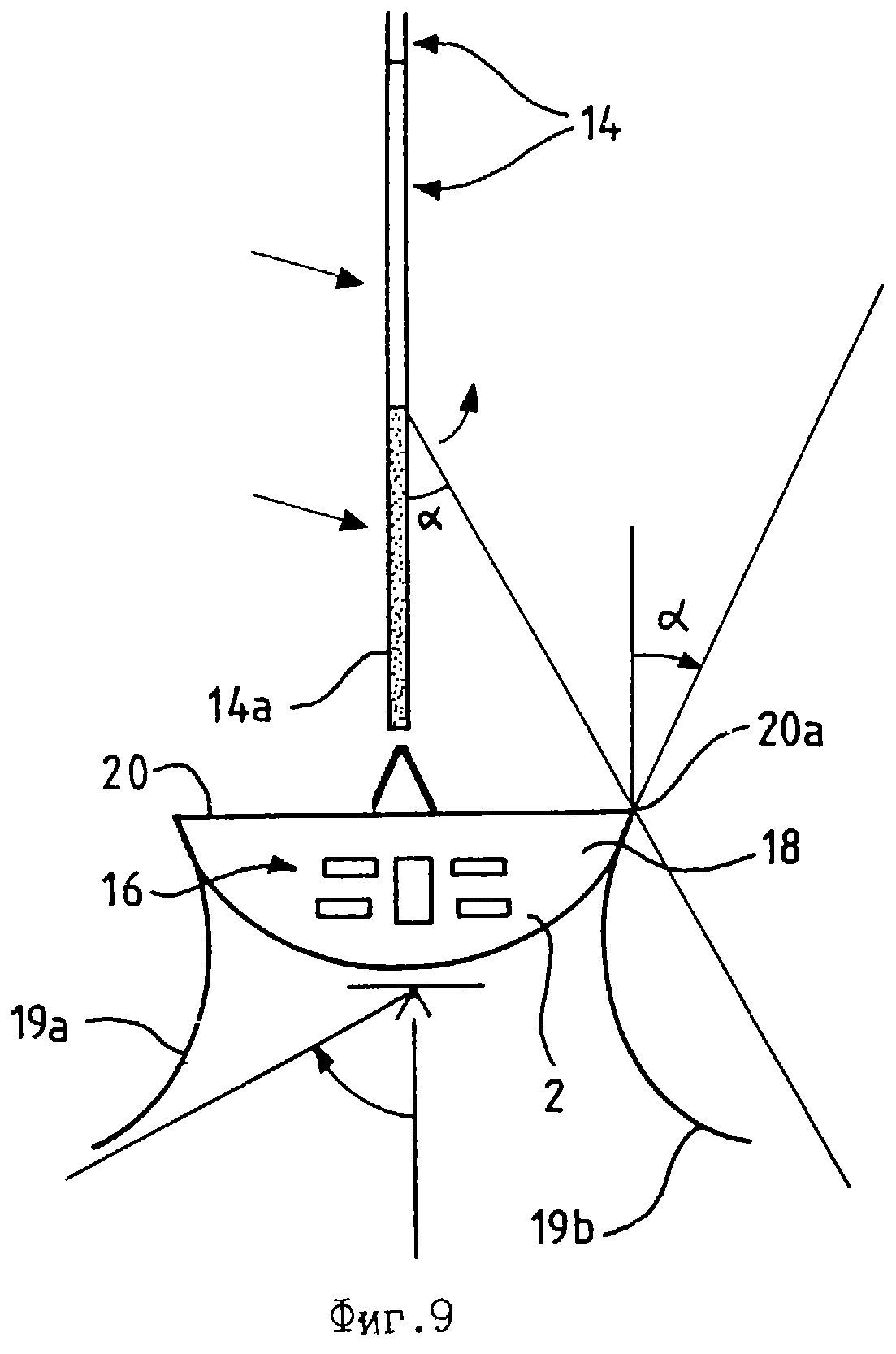
фиг. 9 - схематическое
частичное поперечное сечение одного варианта реализации космического аппарата в соответствии с изобретением;
фиг. 10 - схематический вид стартовой ступени космического аппарата, показанного
на фиг.9;
фиг.11 - поперечное сечение по линии XI-XI на фиг.10;
фиг. 12 - поперечное сечение панели одного варианта реализации космического аппарата в соответствии с изобретением;
фиг.13 - вид сверху панели, показанной на фиг.12;
фиг.14 - поперечное сечение, иллюстрирующее детали панели, показанной на фиг.12 и 13.
Подробное описание изобретения
На фиг. 4 и последующих чертежах ссылочный номер 12 обозначает аппаратурный модуль приведенного в описании космического аппарата, выполненного в соответствии с изобретением. Ссылочные номера 11
и 13, соответственно, обозначают образующий антенну элемент и ячейки солнечной батареи.
На чертежах показаны различные существенные особенности проиллюстрированного космического аппарата.
Орбита ИСЗ является низкой околоземной орбитой, а образующий антенну элемент 11 лежит практически в плоскости, проходящей через центр Земли (угол r вращения равен 90o).
Возможно, антенна имеет возможность излучать с обеих сторон.
Высота Н элемента 11, определяемая как его размер по гравитационной оси, в действительности намного превышает его размер L в перпендикулярном направлении (направлении вектора скорости V на фиг.4 и 5, иллюстрирующих случай, в котором плоскость космического аппарата совпадает с плоскостью его орбиты) или выполнена в направлении высоты Н при помощи поверхности, не выполняющей функций антенны, возможно, частично полой, в результате чего космический аппарат естественным образом стабилизируется за счет гравитационного градиента.
Ячейки 13 солнечной батареи размещены на лицевой поверхности образующего антенну элемента 11, либо, возможно, на обеих поверхностях.
Точки управления амплитудой и фазой для передаваемых или принимаемых волн распределены по поверхности элемента 11.
Этот элемент можно выполнить в виде гибкой конструкции, любые деформации и погрешности абсолютной ориентации которой определяются на основе обработки фазовых измерений, выполняемых датчиками приема сигналов системы GPS, распределенными по ее поверхности, а затем компенсируются средством управления.
Приведенные особенности изобретения вместе с другими особенностями далее будут описаны более подробно.
Образующий антенну элемент 11 в плоскости низкой околоземной орбиты космического аппарата
Выражение "низкая околоземная орбита" означает, что речь идет об орбите высотой менее 2000 км.
Для одного предназначенного диапазона значений угла падения электронное переориентирование луча по углу места, т.е. вокруг оси в плоскости антенны и перпендикулярной оси гравитации, должно быть увеличено по сравнению с антенной, выполненной в соответствии с известным уровнем техники; по сравнению с известным уровнем техники и с учетом заданных ограничений, заключающихся в том, что не должно быть боковых лепестков, связанных с решеткой излучающих элементов, это приводит к снижению расстояния между излучающими элементами (примерно до 0,5 длины волны вместо 0,7 длины волны).
Однако максимальный угол переориентирования антенны или антенн элемента 11 теперь в соответствии с изобретением соответствует минимальным расстояниям распространения (малые значения углов падения), что позволяет ослабить требование относительно низких потерь, обычно накладываемое на излучающие элементы с высоким углом переориентирования, и поэтому использовать известные технологии изготовления излучающих элементов, принятые для стандартной геометрии.
Кроме того, как показано в следующем разделе, предлагаемая конфигурация космического аппарата благодаря ее
допускам к лепесткам управляющей цепи позволяет увеличить расстояние по высоте Н антенны между точками управления сечения по углу места диаграммы направленности антенны 2 λ или даже 2,5 λ
, хотя в соответствии с известным уровнем техники антенна, наклоненная меньше, чем на 30o или 35o, ограничивается величиной порядка 0,7 λ.
Результатом всего этого
является ослабление электронной плотности по высоте с коэффициентом, достигающим 2/0,7, т.е. 2,85.
Возвращаясь к балансу радиолинии, необходимо отметить, что увеличение расстояния с углом падения теперь, в соответствии с изобретением, может быть компенсировано более чем достаточно за счет увеличения эффективной высоты антенны в направлении линии визирования (сокращение переориентирования). В частном случае радиолокационной системы измерительная чувствительность увеличивается прямо пропорционально углу падения, именно так, как это требуется для наблюдаемых геофизических явлений, тогда как в соответствии с известным уровнем техники обычно обеспечиваются профили с обратно пропорциональным соотношением.
По сравнению с антенной,
соответствующей известному уровню техники, наклоненной на 30o или 35o, для получения заданного угла падения прежнего антенного луча и, следовательно, прежней эффективной высоты
требуется высота антенны, увеличенная в пропорции, которая изменяется обратно пропорционально углу падения (всего 10% при угле 60o). Для радиолокационной системы, в частности, расширение
диапазона углов падения в направлении более высоких значений углов падения улучшает функциональные характеристики в смысле достигаемости и повторяемости (время, затрачиваемое спутником для того, чтобы
требуемый район съемки оказался в поле зрения антенны, или для того, чтобы район оказался в поле зрения повторно), причем уравновешивание высоты антенны является весьма незначительным, в частности, в
системах с высокими техническими характеристиками, обеспечивающих максимальный угол падения более 60o
Сложность, вес и стоимость антенной решетки (особенно в том случае, если она
является активной антенной), в основном, определяется общим числом точек управления, видно, что предложенный способ является весьма предпочтительным, так как он позволяет сократить это число с
соотношением, достигающим 2,85/1,1, т.е. приблизительно в 2,7 раз (для системы, работающей при высоких углах падения).
В отличие от известного уровня техники, элемент 11 имеет две лицевых поверхности с одинаковой геометрией, на которых размещены излучающие элементы антенны. За счет одновременного использования обеих лицевых поверхностей диапазон углов падения может быть удвоен для значительного выигрыша в функциональных характеристиках, которые, сохраняя очень хорошие показатели при покрытии высоких значений углов падения, становятся исключительными. Это может быть обеспечено только за счет удваивания излучающих элементов, используя в действительности прежнюю конструкцию, а также прежние блоки электронного оборудования, которые являются составной частью антенны с электронным сканированием. В соответствии с известным уровнем техники такое удвоение больших диапазонов углов падения требует использования двух антенн с двумя противоположными углами разворота.
Модуль 12 также может находиться в плоскости элемента 11, под антенной, например.
В данном случае элемент 11 предпочтительно включает на своем основании рядом с модулем 12 панель 14а, которая не выполняет антенных функций (фиг. 9), возможно, полую, одной из задач которой является предотвращение затенения поля зрения антенн, расположенных лицом к лицу (proper vis-a-vis) с аппаратурным модулем 12, при малых значениях углов падения.
Необходимо отметить, что изложенное ранее аналогичным образом применимо и для спутников связи.
На чертежах образующий антенну элемент 11 показан только с одной стороны аппаратурного модуля 12. В действительности этот элемент может простираться по обе стороны аппаратурного модуля 12, хотя наличие антенн под модулем 12 требует определенного расположения средств телеметрии.
Расположение точек управления антенны
Расположение точек управления по высоте Н
образующего антенну элемента 11 определяет структуру боковых лепестков управляющей цепи при переориентировании основного лепестка, т.е. полезного лепестка, по углу места. Коэффициенты полезного
лепестка и боковых лепестков во время переориентирования модулируются фиксированной по углу места диаграммой излучения элементарного участка антенны, связанного с точкой управления.
На фиг. 6 показана смешанная диаграмма боковых лепестков и диаграмм элементарных участков антенны, получившаяся для обычной антенны (плоскость P с I которой соответствует углу поворота менее 30o или 35o), когда расстояние между точками управления снижено.
Диаграмма направленности элементарного участка антенны (сплошной лепесток DE на фиг.6) обеспечивает основной лепесток, нормальный плоскости антенны и ориентированный в требуемом секторе углов падения. Сегменты прямых линий, обозначенные стрелками, указывают положения боковых лепестков (LP) в отсутствие угла Θ переориентирования основного лепестка относительно основной оси диаграммы направленности элементарного участка антенны, которая в данном случае перпендикулярна антенне. Сегменты пунктирных линий обозначают те же самые положения после переориентирования на угол Θ. Без переориентирования боковые лепестки исключаются благодаря тому что они лежат в провалах диаграммы направленности элементарного участка антенны. Нежелательные лепестки и лепестки диаграммы направленности элементарного участка антенны близко приближаются друг к другу по мере увеличения расстояния между точками управления диаграммой вдоль антенны.
На фиг.6 показано также направление на Землю.
Для правильной работы должны выполняться два условия при сканировании угла Θ в пределах сектора углов падения.
Для того, чтобы не было влияния на уровень неоднозначности, боковые лепестки не должны попадать на горизонт, либо, если это происходит, то коэффициент усиления боковых лепестков должен быть низким (от -30 до -40 дБ ниже коэффициента усиления в основном лепестке).
Для того, чтобы избежать влияния на энергетический баланс радиолинии коэффициент усиления в основном лепестке (показанный нулевым на чертеже) не должен сильно падать.
В случае известного уровня техники, если на космических аппаратах, антенны на которых имеют угол поворота менее 30o или 35o, путем выбора достаточно малого расстояния между точками управления не удается все же отвести боковые лепестки +1 и -1 непосредственно к плоскости антенны или под нее, то выхода из этой ситуации нет, так как рост значения Θ` очень быстро приводит к тому, что боковые лепестки с высоким коэффициентом усиления (+1, +2,...... ., +N) оказываются направленными на Землю.
С другой стороны, прежняя структура, показанная с прилегающими друг к другу боковыми лепестками и лепестком диаграммы направленности элементарного участка антенны, получается для антенны с новой геометрией, позволяющей разрешить создавшуюся проблему. В этом случае подмножество боковых лепестков с высоким коэффициентом усиления +1, +2, +n является мнимым, так как оно расположено с тыльной стороны антенны. Это приводит к тому, что поле зрения на поверхности Земли, соответствующее геометрии антенны, вплотную окружает поле зрения, в пределах которого получают изображение.
Кроме того, если эта геометрия антенны связана с остальной компоновкой, предложенной для космического аппарата, данные физические границы защиты от боковых лепестков продвигаются по направлению к фронту антенны, так как малые углы падения маскируются аппаратурным модулем 12 и при этом не образовываются неопределенности, благодаря тому что отраженный модулем сигнал принимается во время передачи.
При новой геометрии антенны достаточно убедиться, что боковой лепесток -1 не попадает на горизонт при переориентировании в направлении меньших значений углов падения и что этот лепесток совпадает с максимальным провалом коэффициента усиления в основном лепестке. Удерживая лепесток -1 на линии горизонта, сокращенное расстояние между точками управления фиксирует приемлемый нижний предел углов падения по отношению к лепестку 0.
При ориентировании диаграммы направленности элементарного участка антенны в среднее положение между линией горизонта и средним углом падения минимальный провал 3,7 дБ гарантируется при минимальном угле падения, и намного больший провал гарантируется на более высоких углах падения, если последние задержаны относительно линии горизонта. Этот провал является допустимым, так как новый принцип построения космического аппарата часто приводит к энергетическим излишкам. Если этого не случается, то необходимо прекратить недостатки от этого окончательного размещения или допустить увеличение нижнего предела углов падения.
Таким образом, при новой геометрии оказывается возможным ослабить требования к расстоянию между точками управления до 2 λ (или даже до 2,5 λ в зависимости от высоты орбиты и сектора углов падения), тогда как при обычной геометрии и антенне, наклоненной на угол не менее 30o или 35o, расстояние остается меньше 0,7 λ или 0,75 λ, т.е. нарастание управления должно совпадать с нарастанием излучающего элемента (одна точка управления на излучающий элемент).
Диаграмма направленности элементарного участка антенны, в которой основной лепесток уведен в сторону от нормали к антенне для того, чтобы он попадал в требуемый сектор углов падения, может быть получена при помощи антенны с новой геометрией путем составления участка элементарной антенны за счет группировки множества излучающих элементов, имеющих очень раскрытую элементарную диаграмму направленности с фазовым сдвигом между ними в соответствии с фиксированным линейным набегом фазы (в направлении по высоте).
Это показано на фиг. 7, где иллюстрируются излучающие элементы R, управляемые двумя последовательными точками управления PC 1 и PC 2. Фиксированный линейный набег фазы, одинаковый для всех точек управления, осуществляется, например, за счет увеличивающейся длины кабелей между модулем фазовращателя /передачи/ приема М и элементами R.
При этой новой геометрии нарастание также может быть ослаблено, даже если это повлечет за собой появление боковых лепестков решетки излучающих элементов и введение новых потерь в основном лепестке (при малых углах падения). Однако, так как это нарастание теперь не связано с нарастанием точки управления и поэтому больше нет условий электронной плотности антенны, то желательно выбрать расстояние (близко к 0,5 λ), которое исключает этот другой тип боковых лепестков.
Группировка множества элементарных участков антенны в секцию с управляемой
временной задержкой
Сигналы, излучаемые каждым элементарным участком антенны, все выходят из одного источника сигнала с последующей специфической адаптацией фазы, амплитуды и временем
задержки. Это время задержки гарантирует, что время задержки от источника до точки размещения наземной цели не будет зависеть от пересекаемого участка антенны. Аналогично, при приеме объединение
различных сигналов в один выполняется после определенной адаптации фазы, амплитуды и времени задержки. Адаптация времени задержки при приеме позволяет добиться того, что время задержки от точки
размещения наземной цели до точки объединения сигналов не зависело от пересекаемого участка антенны. Разница во времени задержки имеет двоякий эффект, один из которых приводит к размазыванию ответного
импульса по дальности (для радиолокационной системы), а другой приводит к введению ложного сканирования луча по углу места в соответствии с частотными составляющими сигнала.
Когда плоскость антенны нормальна линии визирования, условия по выравниванию времени задержек считаются выполненными, если распределение сигналов на (и от) элементарного участка антенны получено при равных длинах кабелей. В отличие от этого, особенно если линия визирования может управляться путем электронного перенацеливания, необходимо вводить программируемые линии задержки для изменения длин кабелей, по которым сигналы распределяются по антенне, для того, чтобы добиться независимости общего пути до (и от) точки размещения цели. Для сокращения числа программируемых линий задержки допустимо сгруппировать множество участков антенны в одной секции с управляемым временем задержки. Это вызывает остаточное нарушение синхронизации, которое ограничено масштабом секции, его величина возрастает с размерами секции и углом переориентирования относительно нормали антенны.
Новая геометрия антенны может иметь недостатки в смысле числа секций с управляемым временем задержки из-за высокого переориентирования по углу места. Однако это переориентирование выполняется в окрестности ненулевого среднего значения, в результате чего достаточно ввести фиксированную для секции адаптацию длины, соответствующую этому среднему переориентированию, так, что остаточные эффекты связаны только с возросшим переориентированием на одной из сторон среднего переориентирования, так, что они могут поэтому увеличить размеры секции более, чем достаточно. Это почти соответствует случаю, когда антенна физически переориентируется в среднем направлении.
Стабилизация гравитационного
градиента
Принимая, что высота Н элемента 11 намного превышает его размер L, что, возможно, достигается путем применения нефункционального расширения за счет части 14а, кратчайшая ось инерции
такого космического аппарата, как спутник, находится в ее естественном уравновешенном положении, обеспечивающем, что требуемый образующий антенну элемент 11 находится в плоскости, проходящей через
центр Земли, совпадающей, например, с плоскостью его орбиты.
Результатом этого является стабилизация космического аппарата по вращению и тангажу за счет гравитационного градиента.
Размеры образующего антенну элемента 11 обеспечивают естественный возвращающий момент, компенсирующий возмущение по углам вращения и тангажа, которые могут возникнуть на орбите.
Положение аппаратурного модуля 12 на одной линии с элементом 11 не приводит к возникновению никаких возмущений и, из-за его высокой плотности, даже вносит вклад в увеличение возвращающего момента на основе разности между большей и меньшей инерциями системы.
В случае неудовлетворительного возвращающего момента, связанного с гравитационным градиентом, и, в частности, в случае недостаточной высоты Н часть 14а, не выполняющая антенных функций и которая может быть даже частично полой, может быть отрегулирована для получения требуемых гравитационных условий.
Этот вращающий момент оказывает эффективное противодействие возмущениям по углам вращения и тангажа, но совершенно не компенсирует возмущения по углу рыскания.
Управление по углу крена осуществляется системой ориентации и управления движением модуля 12.
Функция последней в части компенсации возмущений по углам вращения и тангажа упрощаются по сравнению с ее обычными функциями, так как они могут быть ограничены заглушением маятникового эффекта возвращающего момента на основе гравитационного градиента.
Основной нежелательный постоянный момент по углу рыскания связан с солнечным давлением.
Необходимо отметить, что очень высокая степень однородности конструкции космического аппарата, показанного на чертежах, помогает существенно ограничить причину этого нежелательного момента, а именно, за счет смещения вдоль вектора скорости центров масс и тяги.
Ячейки 13 солнечной батареи, установленные на одной
или обеих поверхностях образующего антенну элемента 11
Антенна космического аппарата предпочтительно находится в плоскости орбиты, а орбита космического аппарата предпочтительно является
солнечно-синхронной, что ограничивает минимальный угол, который образован между направлением на Солнце и плоскостью ячеек солнечной батареи, размещенных на определенной лицевой поверхности образующего
антенну элемента 11. Антенна, в свою очередь, размещается на теневой лицевой поверхности элемента 11 и может также размещаться на другой лицевой поверхности в тех местах, которые не заняты ячейками
солнечной батареи. Местное время пересечения экватора 6 ч или 18 ч является оптимальным, так как угловой сдвиг ограничен величиной около 30oС (суммарный эффект наклонения орбиты и
восхождения Солнца). Однако большая площадь ячеек солнечной батареи, которая может быть получена таким образом, допускает значительные отклонения от орбитальной плоскости со временем пересечения
экватора 6 ч/18 ч.
Хотя солнечно-синхронность с фиксированным местным временем пересечения экватора облегчает тепловое конструирование элемента 11, спутник может быть также быть рассчитан на изменение местного времени пересечения экватора, включая одну из сторон орбитальной плоскости с местным временем 12 ч/24 ч, либо даже орбиту с дрейфующим местным временем (не солнечно-синхронную, но по-прежнему наклонную орбиту). Для этого достаточно на обеих поверхностях элемента 11 предусмотреть площади, покрытые ячейками солнечных батарей со стоимостью увеличения в общей площади ячеек солнечной батареи. Однако нет уверенности в том, что работа не должна быть обеспечена при местном времени, близком к 12 ч/24 ч.
Плотность ячеек 13 солнечных батарей на обратной поверхности элемента 11 может быть выбрана исходя из того, чтобы покрыть энергетические требования вышеупомянутой антенны без всякой замены батарей. При необходимости элемент 11 может включать участки, которые не выполняют антенных функций, но несут ячейки солнечной батареи.
Соответственно, повторное использование механической конструкции элемента 11 создает очень мощную солнечную батарею, намного более мощную, даже чем соответствующие стандартные высококачественные аппаратурные модули, и дополнительно обеспечивает предельное упрощение подсистемы энергообеспечения аппаратурного модуля 12, где последний только удовлетворяет свои собственные потребности.
Каждое оборудование или группа оборудования элемента 11 могут быть подключены непосредственно к его источнику питания, так что функции преобразования и передачи энергии упрощаются и не касаются больше аппаратурного модуля 12 или даже подключения к последнему.
Этот принцип энергетической автономности имеет еще большие преимущества в случае активной антенны или активных антенн, в которых уже реализована высокая степень электронной взаимозаменяемости, т.е. декомпозиция на идентичные электронные блоки, удовлетворяющие критерию серийного производства и серийной проверки. Это допускает объединение с такими блоками ячеек солнечных батарей и функций преобразования и хранения энергии (возможно, простого электрического конденсатора), причем эти функции являются второстепенными по сравнению с другими функциями. Такой подход с полной взаимозаменяемостью исключает работу антенны с обеих поверхностей, что должно достигаться при помощи дублирования и обратного расположения по меньшей мере части антенны. Не надо упоминать, что такое дублирование в направлении высоты может служить также для увеличения гравитационного градиента и для сокращения необходимости в упоминавшихся ранее площадях, не выполняющих антенных функций.
Принцип энергетической автономности антенны без обращения к помощи центральных аккумуляторных батарей делает невозможной работу, когда ИСЗ находится в тени Земли, и поэтому более подходит для местного времени пересечения экватора в восходящем узле 18 ч (или 6 ч), при котором спутник попадает в тень Земли менее 20% времени нахождения на орбите и только на южном (или северном) полюсе в течение нескольких месяцев в году, что не представляет угрозы для большинства космических программ.
С другой стороны, когда космический аппарат не находится в тени Земли, работа осуществляется непрерывно.
В работе это является преимуществом. Кроме того, электронные устройства и ячейки подвергаются низким температурным колебаниям. Это является усовершенствованием в смысле температурного класса надежности и долговечности.
Предшествующие замечания применимы также к ситуации, в которой плоскость, в которой находится элемент 11, не лежит в плоскости орбиты, а только проходит через центр Земли. Приспособление смещения угла рыскания плоскости элемента 11 относительно плоскости орбиты, возможно, меняющегося при движении по орбите, может обеспечить дополнительную степень свободы для оптимизации солнечного освещения, в частности в случае орбиты, местное время пересечения экватора которой не равняется 6 ч/18 ч и которая даже не является солнечно-синхронной.
Деформируемый (или гибкий) образующий антенну элемент 11 и датчики системы GPS
Как показано на фиг. 7 и 8, в частности, элемент 11
составлен из множества панелей 14, шарнирно соединенных друг с другом и, будучи развернутыми, грубо выровненных с основной плоскостью элемента 11. Развертывание осуществляется вдоль высоты Н элемента
11. Во время запуска различные панели 14 уложены в аппаратурный модуль 12.
Связанные с панелями механизмы рассчитаны по меньшей мере на их развертывание и, после достижения заданного положения, на грубое выравнивание (ошибка установки положения 10 см по высоте от 10 м до 15 м или более между двумя краями панелей, ошибка в 1 см между двумя последовательными панелями).
В обычных условиях, т.е. после развертывания, силы, которые они могут передавать, являются очень слабыми и ограниченными реакцией на крутящий момент гравитационного градиента, моменты солнечного давления и моменты системы ориентации (прикладываемые аппаратурным модулем). Эти возмущения происходят на угловой орбитальной частоте и поэтому могут быть легко отделены от естественных мод элемента 11, пока они поддерживаются достаточно медленными для того, чтобы могли проводиться измерения деформаций и ошибок и последние могли использоваться средством управления передаваемой и принимаемой волнами.
Переменные нагрузки во время работы ускорителей и вызванные компенсациями управления ориентацией, а также во время начальной фазы ориентации, являются более высокими, но позволяют нарушить выравнивание (misalignment) большей амплитуды (программа орбитального полета прерывается во время работы этих ускорителей), которые снижены в размерах и загашены при помощи механизмов и/или соединений между панелями.
Датчики 15 приема сигналов системы GPS распределены по различным панелям 14.
Каждый из датчиков 15 содержит по меньшей мере антенну приема сигналов системы GPS, причем функции демодуляции и измерения сигналов системы GPS, возможно, физически объединяются вместе для нескольких датчиков, например, на уровне одной панели 14. Для выполнения всех функций демодуляции и измерения сигналов системы GPS может использоваться один и тот же гетеродин, расположенный, например, в аппаратурном модуле 12.
Измерение относительного положения двух датчиков 15 элемента 11 основывается на интерферометрических измерениях разности фаз между двумя датчиками сигнала с одного и того же космического аппарата системы GPS. Для измерения относительного положения двух датчиков 15 необходимы по меньшей мере два интерферометрических измерения для двух различных спутников, если расстояние между датчиками известно, или для трех по меньшей мере спутников, в противном случае. На практике каждое интерферометрическое измерение дифференцируется относительно измерения, выполненного при помощи дополнительного спутника, для того, чтобы избежать уклонов, характерных для каждого основания датчиков (принцип двойной разности фаз).
Вообще говоря, при использовании подобных датчиков системы GPS задача заключается в измерении относительного положения датчиков и абсолютной ориентации усредненной плоскости, которую они образуют. Это может быть достигнуто путем централизованной обработки фазовых измерений, выполненных различными датчиками 15, например, в аппаратурном модуле 12. Для снижения централизации информации возможно также определить этап обработки на уровне каждой панели 14 в отношении взаимного положения датчиков 15 одной панели 14, которое эквивалентно абсолютной ориентации указанной панели, если последняя не подвержена каким-либо внутренним деформациям, при этом централизовано должны быть вычислены только относительные положения опорных датчиков, определенных для каждой панели.
Каждая из панелей 14 включает минимум три датчика 15 системы GPS, которых достаточно в том случае, если отсутствуют внутренние деформации панели. Необходимость облегчения конструкции может привести к термоэластичным деформациям в панелях 14. Для измерения этих деформаций на каждой панели 14 требуется по меньшей мере один дополнительный датчик 15 системы GPS.
Фактически плоская геометрия космического аппарата уменьшает источники многолучевости, которые являются основным ограничением в использовании системы GPS для точного определения относительного положения. Единственным источником многолучевости является аппаратурный модуль 12, причем исключено может быть по меньшей мере основное влияние последнего.
Как показано выше, панель или панели 14а, присоединенные к аппаратурному модулю 12, не выполняют антенных функций. Поэтому они не оснащаются датчиками системы GPS. Как показано на фиг.9, для исключения источников многолучевости на датчиках или других панелях 14 достаточно исключить те космические аппараты системы GPS, сигналы с которых принимаются при минимальных углах падения. Последние будут по крайней мере меньше, чем минимальный рабочий угол падения космического аппарата (обычно 25o), так как некоторые или все панели 14а по иным причинам не затеняют поле зрения. Это сильно ограничивающее маскирование оставляет достаточное количество видимых спутников для нормальной работы системы. Таким образом, многолучевость ограничивается дифракцией на кромке 20а плиты 20. Дифракционные лучи не имеют какого-либо определенного направления и поэтому не могут быть маскированы.
Деформация элемента 11 компенсируется на уровне каждого поверхностного блока, оснащенного средствами для сдвига фазы принимаемой или передаваемой волны, причем сдвиг фазы обеспечивает переориентирование луча относительно усредненной плоскости и положения этого поверхностного блока около и на этой усредненной плоскости. Положения поверхностных блоков получаются из положений соседствующих с ними датчиков системы GPS.
Подобно процедуре измерения деформаций, в процедуре компенсации также может быть предусмотрен локальный этап на уровне каждой панели. Сдвиг фазы осуществляется с учетом усредненной плоскости на уровне панели, а также с учетом соответствующих переориентирований и смещений положений. Необходимо последовательно добавить для каждой панели фазовый член, соответствующий смещению опорной точки панели относительно волнового фронта суммарного луча всей антенны, проходящего через опорную точку на опорной панели.
Принимая предложенные выше меры, касающиеся, в числе прочего, устранения многолучевости сигналов системы GPS, можно добиться компенсации по плоскости в пределах одного миллиметра, а ориентация усредненной плоскости может быть определена с точностью 1/10 градуса. Это хорошо согласовывается с требованиями, предъявляемыми при решении задач, связанных с радиолокационным наблюдением, включая радиолокационное наблюдение на высоких частотах (в Х-диапазоне), при котором требования к плоскости наиболее жесткие. Для облегчения этих балансировок в случае требований, предъявляемых на высоких частотах, высокочастотные панели желательно размещать на краю элемента 11, противоположном модулю 12, для того, чтобы сократить влияние остаточной многолучевости от модуля 12. Такое размещение всегда будет возможно, если, как показано выше, элемент 11 будет включать не только высокочастотные панели (низкочастотные панели 14а).
Ясно, что компенсация с использованием фазовых измерений на основе датчиков GPS аналогичным образом применима и в случае, когда образующий антенну элемент представляет собой одиночную панель, подверженную деформациям.
Aппaратурный
модуль и средства вывода
Далее более подробно описывается аппаратурный модуль 12.
Аппаратурный модуль 12 несет различные блоки оборудования за исключением антенны, в частности: центральное электронное оборудование радиолокационной системы, запоминающие устройства для хранения получаемых изображений, средства телеметрирования, а также различное служебное оборудование, включая систему ориентации и управления орбитальным движением, которая содержит магнитометры, магнитные гироскопы, топливный бак и двигатель, а также средства телеуправления и автономного управления.
Модуль 12 содержит также аккумуляторную батарею, емкость которой понижается до определенного значения, диктуемого модулем, если в отношении элемента 11 выбран принцип энергетической автономности.
На фиг.9 и 11 это различное оборудование обобщенно обозначено ссылочным номером 16.
Если в отношении элемента 11 выбран режим энергетической автономности, то первая из панелей 14а, присоединенных к модулю 12, содержит независимый солнечный генератор, подающий энергию в модуль 12, когда космический аппарат не находится в тени Земли. При попадании спутника в тень Земли солнечный генератор заменяется батареями для сохранения информации, хранящейся на борту ИСЗ, и работоспособности аппаратурного модуля. Батареи используются также во время вывода спутника на орбиту.
Как показано на фиг.10 и 11, аппаратурный модуль 12 также обеспечивает механическую прочность связке панелей 14 во время запуска.
Для этого аппаратурный модуль 12 выполняется из цилиндрической поддерживающей оболочки, в которой сложены панели и которая оснащена пиротехническим отделителем для их развертывания. Эта цилиндрическая оболочка образует круговую границу 17 со средством вывода и облегчает выполнение условий по жесткости, налагаемых на средство вывода. Размеры космического аппарата вдоль оси средства вывода соответствуют длине L элемента 11. Длина цилиндра определяется непосредственно длиной L, а диаметр ограничивается единичной высотой панели 14.
Цилиндрическая оболочка изготавливается из двух полуоболочек 18 и 19, собираемых вместе после сборки связки панелей и блоков оборудования аппаратурного блока 12. Одна полуоболочка 18 содержит различные блоки оборудования аппаратурного модуля 12. Другая полуоболочка 19 оснащена пиротехническим отделителем, представляющим собой отделитель с двумя створками. В результате взрыва этого отделителя образуются и выбрасываются две створки, которые удерживаются открытыми при помощи двух шарниров, установленных на полуоболочке 19 и размещенных вдоль границы раздела с полуоболочкой 18.
В процессе запуска различные панели 14 уложены одна на другую и удерживаются напротив плиты 20, присоединенной к полуоболочке 18 при помощи стяжек, проходящих через все панели. Другая лицевая сторона плиты несет оставшуюся часть блоков оборудования космического аппарата.
Такая компоновка облегчает удовлетворение различных требований по центрированию веса. Центрирование при запуске вдоль оси средства вывода обеспечивается за счет соответствующего смещения плиты 20 относительно средней плиты цилиндра, причем сам по себе цилиндр остается отцентрированным по оси средства вывода. Оба способа центрирования в режиме развертывания, а именно выравнивание центра масс модуля 12 как в плоскости антенны, так и вертикально относительно середины антенны в направлении I (облегчающее естественное выравнивание за счет гравитационного градиента кратчайшей оси инерции элемента 11 вдоль местной вертикали и ограничивающее крутящий момент солнечного давления на космический аппарат), достигаются за счет балансировки блоков оборудования на плите 20.
Открытая конфигурация створок 19а и 19b приводит к заслонению всех источников нежелательных отражений сигналов системы GPS в направлении образующего антенну элемента 11, за исключением отражений от плиты 20, и, в то же время, оставляет открытым поле зрения, необходимое телеметрической антенне, установленной на полуоболочке 18.
Предложенная цилиндрическая оболочка космического аппарата при запуске также имеет преимущества, исключая необходимость в обтекателе полезной нагрузки средства вывода. Присоединение носового конуса, ограничение навесных элементов единственным элементом (телеметрической антенной) за счет выбора антенны, припрессованной к оболочке или развертываемой на орбите, а также необязательное добавление на основании цилиндра юбки, закрывающей соединение со средством вывода, позволяет воссоздать аэродинамические свойства, эквивалентные обтекателю полезной нагрузки. Такой выбор учитывает условия увеличивающейся массы и разрешенных максимальных общих размеров космического аппарата.
Добиваясь того, чтобы длина L не превышала 5,5 м, можно обеспечить совместимость с обтекателями полезных нагрузок для планируемых космических систем на базе малых ИСЗ (ракета-носитель LLV3 фирмы Lockheed-Martin, ракета-носитель DELTA-LITE фирмы McDONNEL DOUGLAS) или с существующими средствами вывода среднего класса типа ракеты-носителя Delta-2, в том случае, если толщина образующего антенну элемента 11 в сложенном состоянии и аппаратурного модуля 12 совместимы с диаметром не более 2 м. Это случай соответствует, например, общей высоте образующего антенну элемента 11 менее 13 м или 15 м (8 или 9 панелей высотой 1,7 м). Антенна с такими размерами позволяет выполнять космические программы, которые при использовании обычного подхода (с обычной геометрией и стандартным аппаратурным модулем) приводят к возрастающим массогабаритным характеристикам ИСЗ и поэтому требуют более дорогих средств вывода (типа ракет-носителей ARIANE5, ATLAS-11 AS).
Общая компоновка панели
На фиг.12 показана общая компоновка одного возможного
варианта реализации панели космического аппарата в соответствии с изобретением, соответствующая случаю излучения только с одной стороны панели.
Панель имеет слоистую структуру, включающую необязательный обтекатель 21, излучающую панель 22, промежуточную алюминиевую конструкцию 23 типа NIDA (зарегистрированный торговый знак), несущую электронные средства 27, слои 24 тепловой защиты и плиту 25 с ячейками 13 солнечной батареи.
На промежуточной конструкции 23 выполнены вертикальные и горизонтальные ребра 26 жесткости двутаврового профиля, поддерживающие плиты 25.
Как видно из фиг. 13, панель разбита на множество функциональных элементов 28.
Электронные средства 27 функциональных элементов 28 установлены между конструкцией 23 и слоями 24 тепловой защиты. Они включают фазовращающие и приемо-передающие средства, а также соответствующие средства управления. Кроме того, электронные средства обрабатывают электроэнергию, которая должна поступать к ним от ячеек 13 солнечной батареи, размещенных на обратной стороне панели.
Каждая панель имеет по меньшей мере одну втулку 29, проходящую через нее, причем через эту втулку пропущена стяжка для фиксации панели в поддерживающей оболочке во время запуска.
Из-за того, что и втулка 29, и датчик 15 системы GPS делают невозможным выполнение антенных функций, предпочтительно они могут быть объединены вместе в общем функциональном блоке 28, который частично препятствует выполнению антенных функций. Эта втулка 29 и этот датчик 15 системы GPS также преимущественно размещаются на краю вышеупомянутого блока 28 вблизи пересечения двух ребер жесткости 26, как это показано на фиг.14.
Электроэнергия подается к блокам высокочастотного оборудования панелей непосредственно ячейками солнечной батареи, находящимися на панели, при этом автономность достигается либо на уровне каждого блока, либо на уровне группы, включающей несколько различных блоков.
Высокочастотный сигнал поступает на каждую панель или полупанель по волоконно-оптическим или коаксиальным линиям, при этом используется "звездообразная" схема питания из аппаратурного модуля 12 или "гирляндная" схема питания из верхней панели (наиболее удаленной от Земли) для того, чтобы физическая длина кабелей составляла часть необходимых линий задержки.
Модули обработки (схема формирования луча, первичный модуль, вторичный модуль) подключены к аппаратурному модулю 12 при помощи шины контроля/управления.
Электронные средства 27, объединенные вместе в одном функциональном блоке 28, выполнены по интегральной или гибридной технологии.
В случае, если панель излучает с обеих сторон, одним из возможных вариантов воплощения является замена плиты 25, на которой установлены ячейки солнечной батареи, на плиту с излучающими элементами. В обоих случаях для облегчения интеграции и подключения к блокам электронного средства 27 предпочтительно ограничивать площадь поверхности этих пластин с тем, чтобы она, пластина, после интеграции закрывала каждое отделение, образуемое прямоугольной сеткой ребер 26 жесткости. За счет этого обеспечивается возможность частичной разборки и ремонта панелей.
Размеры солнечного генератора
Ячейки 13 солнечной батареи выполняются, например, в виде арсенид-галлиевых или германиевых ячеек, обеспечивающих необходимые 10 В в наихудшем случае (т. е. в конце их жизненного цикла, при наихудшем
угле падения солнечных лучей, равном 120o). Для каждого функционального блока элемента 11 предусмотрен ряд из 16 ячеек такого типа.
Выбор арсенид-галлиевой технологии (а не кремниевой) обусловлен большей устойчивостью к перегреву ячеек солнечной батареи.
Электроэнергия, вырабатываемая таким образом, накапливается в электролитических и керамических конденсаторах, имеющихся в средствах 27, для ограничения падения напряжения во время излучения радиолокационного импульса и приведения этого падения в соответствие с требованиями оборудования и эксплуатационными характеристиками (обычно до 10%).
Напряжение ограничивается 10 В.
Управление ориентацией и орбитальным движением
В простейшем варианте
используется одиночная двигательная установка, направленная вдоль оси вращения. Управление ориентацией затем определяется, по существу, периодическими возмущениями по углу рыскания, происходящими при
выходе на орбиту и работе двигателя удержания космического аппарата на орбите (в направлении V), а также обусловленными невыравненностью одиночной двигательной установки. Коррекции по удержанию
космического аппарата на орбите разбиваются на элементарные импульсы очень малой продолжительности, которая необходима для того, чтобы коррекции были эффективными, осуществляемые после разворота на
необходимый угол по рысканию. За этими элементарными импульсами следует восстановление ориентации по углу рыскания. Продолжительность процедуры удерживания космического аппарата на орбите может быть
значительной, однако условия солнечной освещенности и теплового состояния антенны между двумя элементарными импульсами должны оставаться постоянными. Во время выполнения маневра по удержанию ИСЗ на
орбите импульсы тяги становятся слабее и, что наиболее важно, относительно редкими. Для таких спутников из-за низкого трения (очень малого поперечного сечения в направлении V) такой подход разделения
и размывания во времени реакции системы ориентации является приемлемым, даже если это требует прерывания выполнения целевых функций на одном или нескольких витках. Ценой повышенной сложности можно
добиться того, чтобы использование нескольких двигателей, управление которыми осуществляется путем регулирования времени тяги, позволяло, при необходимости, в реальном масштабе времени гасить
нежелательный крутящий момент по углу рыскания и сокращать общее время тяги. Особенности космических аппаратов делают возможным использование двигателей с тягой на холодном газе, причем увеличенная
масса баков хранения топлива по сравнению с гидразинным вариантом становится либо приемлемой, включая космические программы продолжительностью до десяти лет, обеспечивающих малое трение, либо
приветствуемой, для увеличения гравитационного градиента.
Может возникнуть необходимость в коррекции плоскости орбиты в процессе выполнения программы, в частности, для орбит с местным временем, отличным от 6 ч/18 ч. Маневр этого типа отличается от включения двигателей с тягой в направлении V предварительным разворотом спутника на 90o по углу рыскания для приведения двигателя в положение, нормальное плоскости орбиты.
Перед развертыванием антенны ориентация может быть определена путем фильтрации результатов измерений, поступающих с магнитометров, с точностью порядка 1o; после развертывания используются принимаемые антенной сигналы системы GPS и точность повышается до величины, больше 1/10 градуса.
Магнитные гироскопы выдают моменты, необходимые для гашения маятникового эффекта гравитационного градиента по тангажу и вращению, для компенсации непрерывных эффектов (солнечного давления), а также для восстановления после кратковременного воздействия на угол рыскания во время работы двигательной установки.
Начальная ориентация образующего антенну элемента 11 преимущественно устанавливается следующим образом.
Элемент 11 разворачивается, после чего управление осуществляется с использованием магнитных гироскопов, предназначенных для снижения скорости вращения на основе использования исключительно магнитометрических измерений.
Космический аппарат стабилизируется вокруг положения с устойчивым гравитационным градиентом.
Возможны два положения с устойчивым гравитационным градиентом, однако одно с элементом 11 под, а другое с элементом 11 над модулем 12.
Если образующий антенну элемент 11 развернут под аппаратурным модулем 12, спутник вращается по углу рыскания так, чтобы ориентировать солнечные генераторы в направлении на Солнце для заряда аккумуляторных батарей и восстановления их автономности, после чего используется новая стратегия управления ориентацией с использованием магнитных гироскопов для закрутки космического аппарата вновь вокруг всех его осей, после чего опять используется стратегия управления ориентацией, направленная на снижение скорости вращения для возвращения в положение с устойчивым гравитационным градиентом.
Процедура начала и остановки вращения повторяется, пока антенна не установится в правильное положение.
Каждый раз, когда начинается вращение, образующий антенну элемент 11 имеет один шанс из двух повторно принять требуемую ориентацию.
Все это приводит к начальной ориентации, причем система управления движением состоит из (исключая резервные устройства) трех магнитных гироскопов, одного трехосного магнитометра, одного бортового компьютера, одного приемника сигналов системы GPS и четырех антенн приема сигналов системы GPS (в данном примере используются антенны, установленные на панелях, наиболее удаленных друг от друга), а также подсистемы движения на базе одного двигателя.
Отметим, что описанная система управления ориентацией, не использующая никаких оптических датчиков (датчиков Земли, Солнца или звезд), может работать независимо от местного времени пересечения экватора или колебаний последнего в течение срока выполнения космической программы.
Космический аппарат с перевернутой ориентацией (элемент 11 находится под аппаратурным модулем) или космический аппарат с несущественной ориентацией
Номинальная ориентация космического аппарата может быть перевернута относительно ориентации, описанной выше, т.е. когда образующий антенну элемент находится под аппаратурным модулем 12.
В итоге преимущество заключается в устранении ограничения на работу радиолокационной системы с малыми углами падения. Панели 14а выбираются таким образом, чтобы избежать затенения поля зрения, которое все же может понадобиться для исключения избыточного маскирования спутников системы GPS на уровне верхних панелей 14, что в данном случае определяется только минимальным числом спутников системы GPS, необходимых для работы. В этом случае направления падения сигналов спутников GPS, в которых может возникнуть многолучевость из-за отражения от плиты 20 аппаратурного модуля, в действительности затеняются Землей. Начало гирляндной схемы подачи высокочастотных сигналов на панели приходится на первую панель, находящуюся вблизи модуля 12, а не на панель на противоположном конце, как это имеет место в случае с ранее описанной системой ориентации.
Тем не менее телеметрическая антенна должна быть размещена по-другому для исключения затенения ее поля зрения элементом 11. Один из вариантов решения заключается в использовании двух антенн на аппаратурном модуле, по одной на каждой стороне элемента 11, в результате чего одна антенна постоянно находится в зоне прямой видимости, независимо от положения станции относительно плоскости орбиты. При этом за виток требуется не более одного переключения с одной антенны на другую. Вынос телеметрических антенн за пределы плоскости делает возможным перекрывать поля зрения двух антенн, и при пересечении станцией приема телеметрии плоскости орбиты более гибко выполнять операцию переключения с одной антенны на другую.
Кроме того, спутник может быть рассчитан на работу в первом же устойчивом положении, получившемся после развертывания, и, таким образом, отпадает необходимость в вышеописанных начале и прекращении вращения. С точки зрения аппаратуры требуется предусмотреть два типа телеметрических линий, соответствующих обоим вариантам геометрии, выбрать размеры панелей 14а так, чтобы не было затенения в наихудшем случае, реализовать два переключаемых варианта подачи высокочастотных сигналов, различающиеся начальным местом подачи, а также для обеих вариантов геометрии предусмотреть систему теплового контроля. Все остальные приспособления к оптимальной геометрии являются малозначительными и заключаются, по существу, в доработке программного обеспечения.
Все вышесказанное в равной степени применимо к ситуации, в которой элемент 11 выполнен в виде двух частей, одна из которых находится над, а вторая под модулем 12.
Применение в случае
космических аппаратов с бортовой радиолокационной аппаратурой, работающей на низких, средних и высоких частотах
Все остальные характеристики в течение всего времени выполнения космической
программы поддерживаются точно постоянными, причем функциональная высота образующего антенну элемента 11 прямо пропорциональна рабочей длине волны, в результате чего может оказаться, что необходимые
условия гравитационного градиента не могут быть легко получены для радиолокационных систем, работающих на высоких частотах (Х- или С-диапазоны частот), как это имеет место для радиолокационных систем,
работающих на низких частотах (в S -, L- или Р-диапазонах частот). Добавление заполненных или полных панелей 14а к панели солнечного генератора аппаратурного модуля необходимо главным образом при
высоких рабочих частотах радиолокационной системы.
Применительно к комбинации различных частот, что является необходимым атрибутом радиолокационных систем нового поколения, система в целом остается оптимальной, так как все панели для различных частот вносят свой вклад в общий гравитационный градиент, и при этом не возникает необходимости (или более не возникает необходимости) в добавлении панелей 14а. В частности, для радиолокационных систем L-диапазона частот с восемью функциональными панелями 14, достаточно добавить панель Х-диапазона тех же размеров для осуществления зондирования в двух диапазонах частот, что приведет к изменению бокового размера аппаратурного модуля по сравнению со случаем работы на одной частоте. Для работы на различных частотах может использоваться разная функциональная длина L антенны, при этом стандартизация длины панели обеспечивается за счет нерабочего удлинителя поверхности более коротких панелей, что при необходимости облегчает задачи центрирования (выбора центра масс, центра солнечного давления, тяги и т.д.).
Если выбран вариант, в котором каждая антенна элемента 11 обладает энергетической автономностью, покрытие ячейками солнечной батареи на обратной стороне панелей должно быть более плотным на высоких частотах, так как в большинстве случаев потребляемая мощность (с возрастанием частоты) увеличивается (в случае радиолокационной станции), а высота антенны сокращается. В случае недостаточности электроэнергии и при обращении к дополнительным площадям ячеек где-либо в другом месте на элементе 11, отличном от обратной стороны данной антенны, предпочтительным является разместить эти области в непосредственной близости и на любой стороне данной антенны для того, чтобы облегчить соединения при передаче электроэнергии и, возможно, сохранить вышеописанный принцип полной электронной заменяемости.
Применение для космических аппаратов с бортовыми
интерферометрическими радиолокаторам, осуществляющими съемку за один проход
Интерферометрическая радиолокационная съемка за один проход предназначена, в основном, для получения
топографических данных и состоит в формировании двух изображений одновременно с использованием двух разнесенных космических антенн, причем одна антенна является передающей, а вторая - приемной.
Точность получаемых данных определяется отношением протяженности базы, образовываемой двумя антенными в направлении, перпендикулярном вектору скорости, к рабочей длине волны, в результате чего антенны,
установленные на одном спутнике, чаще всего могут использоваться только на высоких частотах (в Х- или С-диапазонах) при протяженности антенной базы 10 или 15 м.
Достаточно просто добавить интерферометр на космический аппарат, в соответствии с настоящим изобретением оснащенный радиолокационной аппаратурой. Вторая антенна, используемая исключительно для приема сигналов, в общем случае может являться одиночной панелью 14, так как может не возникнуть необходимости в обеспечении работы при высоких углах падения (что определяет высоту антенны), и потому, что требования к солнечному генератору на обратной стороне антенны значительно снижены из-за того, что антенна используется только в приемных целях и поэтому либо потребляет мало, либо вовсе не потребляет электроэнергии. В случае РЛС, работающей только на высокой частоте, данная панель 14 добавляется между панелью 14а, выбранной так, чтобы избежать затенения поля зрения (и, возможно, нести солнечный генератор для модуля), и другими панелями 14а, добавленными специально для обеспечения гравитационного градиента. Если последние отсутствуют или наличествуют в недостаточном количестве, то добавляются другие панели для получения необходимой высоты базы. В случае РЛС, работающей на нескольких частотах, работа интерферометра осуществляется, как правило, только на высокой частоте, причем приемная панель 14 интерферометра и основная антенна, предназначенная для работы на этой высокой частоте, размещаются на противоположных поверхностях элемента 11, и обе они отделяются от аппаратурного модуля панелью 14а, выбранной таким образом, чтобы избежать затенения поля зрения. База интерферометра, полученная таким образом, при необходимости может быть увеличена в размерах путем добавления дополнительных нерабочих панелей 14а.
Для дальнейшего снижения воздействия, которое оказывает добавление интерферометра, функции солнечного генератора модуля и приемной антенны интерферометра могут быть объединены в одной и той же панели 14а. Очень низкое энергопотребление последней предохраняет работу генератора модуля, и отпадает необходимость в принятии специальных мер по исключению затенения поля зрения приемной антенны, так как нет необходимости в том, чтобы она нацеливалась в направлении самых малых углов падения, либо она может занимать только верхнюю, а поэтому лучше освещенную, часть панели, если требуемая высота меньше, чем одна панель, что может случиться, например, в том случае, если самые высокие частоты не используются.
Таким образом, интерферометрические функции добавляются ценой незначительного увеличения стоимости, несмотря на то, что на обычных космических аппаратах возникает необходимость в добавлении специальной развертываемой мачты, на конце которой размещают приемную антенну интерферометра.
Раздельная и пропорциональная эксплуатация в контексте международного сотрудничества
Международное сотрудничество в космосе, если оно является успешным, предполагает справедливое распределение участия разных стран не только при разработке космических средств, но и в ходе их
эксплуатации. К сожалению, для космических систем дистанционного зондирования основная эксплуатационная задача, называемая программированием работы целевой аппаратуры, должна быть централизована для
обеспечения оптимального обслуживания запросов на безконфликтной основе и с сохранением целостности космического аппарата. Это приводит к неразрешимой проблеме, заключающейся в отсутствии у
большинства партнеров реальной возможности организовывать центры управления полезной нагрузкой на своей территории вместе с центрами управления космическим аппаратом, так как последние в большинстве
случаев не могут быть отделены от центров передачи командно-программной информации.
Схема, посредством которой каждый партнер сохранит возможность управления режимом использования спутника для проведения съемки в районе, ограниченном круговой зоной видимости его приемной станции, причем это будет осуществляться простейшим способом, подобно разработанному для спутников системы INTELSAT (аренда ретранслятора или ствола), до сих пор была нереализуема. Задействование ресурсов на одном участке витка всегда влияло на готовность спутника на других участках так, что централизованная координация становилась недостижимой. При дистанционном зондировании с использованием оптических датчиков временные задержки, обусловленные изменением направления съемки, могут быть весьма значительными (для того, чтобы обеспечить переориентацию космического аппарата или зеркальной системы), тогда как для современных маневренных радиолокационных станций определенные проблемы связаны со временем перезарядки аккумуляторных батарей, ограничения на включения/выключения передатчиков или ограничения на тепловой режим бортового оборудования.
За счет выбора соответствующего варианта режима автономности элемента 11 принцип построения спутника, проиллюстрированный на фиг.4 и последующих чертежах, обеспечивает непрерывную работу бортовой радиолокационной системы, когда ИСЗ не находится в тени Земли. Так как при такой схеме географического деления получаемые данные не записываются на борту, а передаются в реальном масштабе времени на наземные станции (запись данных на борту и их последующее продвижение к месту использования не используются), проблема разделения спутника может быть сведена к простому разделению зон видимости между партнерами и гарантированию каждому партнеру автономии и свободы действий при программировании работы бортовой целевой аппаратуры и получении данных дистанционного зондирования.
Однако новая возможность географического разделения доступа к космическому аппарату сама по себе не позволяет каждому партнеру получать возможность управления спутником в своем секторе. Необходимо также принять общие требования по управлению спутником и гарантировании его состояния. В этой связи отметим, что архитектура элемента 11 с полной заменяемостью электронного оборудования обеспечивает защиту против ошибок, которые могут произойти при программировании работы целевой аппаратуры. Каждый базовый функциональный блок, выполненный из радиочастотного модуля и соответствующего блока ячеек солнечной батареи, должен рассеивать в себе практически всю энергию, подаваемую ячейками, независимо от его функционального вклада в общее целое, в результате чего блок влияет на тепловой режим, определяемый текущим состоянием ячеек солнечной батареи и электронного оборудования и не зависящий от задействования и программирования режима блока. Элемент 11 не зарезервирован, но достаточно просто повлиять на постепенное ухудшение его характеристик, связанное с поломками, или на ухудшение элементарных функциональных блоков. Каждый партнер может выбрать оптимальный путь преодоления подобных ухудшений (путем выбора задействуемых блоков и формируемой диаграммы направленности антенны), причем это не будет влиять на процесс ухудшения сам по себе (процесс без размножения ошибок).
Помимо программирования в реальном масштабе времени режимов получения изображений, технологических режимов элемента 11 и типов получаемых материалов дистанционного зондирования (ширины полосы обзора, формы зондирующего сигнала, пространственного разрешения, угла падения), каждый партнер может разработать и организовать проверку радиолокатора в соответствии с его конкретными требованиями и интересами. Часть полезной нагрузки, встроенная в аппаратурный модуль, также выигрывает от непрерывного энергетического ресурса, но, в отличие от образующего антенну элемента 11, выполнена не в виде совокупности большого количества идентичных функциональных блоков. Низкий уровень функциональной ненадежности используемых технологий (отсутствие электронных ламп, механизмов, конструкций временной задержки и т.д.), а также сокращенные размеры функциональных блоков позволяют создавать резервную систему блоков вблизи сокращенного количества переключателей, которые могут быть задействованы извне любым из партнеров. Таким образом, принцип разделения может быть продолжен на всю полезную нагрузку.
Функционирование спутника предполагает также решение задач управления орбитой (поддержание параметров орбиты и грубое управление ориентацией панели решетки), которые требуют участия наземного сегмента. Не связанные с использованием полезной нагрузки, эти задачи, с другой стороны, могут привести к номинально предсказуемым ограничениям доступа, затрагивающим время от времени всех партнеров (например, в периоды стабилизации спутника и выполнения орбитальных маневров). Они могут быть централизованы и поручены одному космическому агентству, уполномоченному партнерами, но работающему без взаимодействия с последними.
Вышеизложенная схема разделения описана для наиболее статичного режима из возможных с целью освещения общих исключений взаимосвязей и взаимозависимостей (разделение участков орбитального витка или районов обслуживания), а также выигрыша от возросшей простоты реализации космических программ с участием большого количества небольших партнеров. На основе этого могут быть получены другие соглашения: более тесные соглашения между партнерами, частные или общие, для динамического распределения участков витка спутника, или введение центрального партнера, специально отвечающего за запись изображений и обслуживание бортовых запоминающих устройств на невыделенных участках витка либо в интересах местных партнеров.
Необходимо отметить, что данный принцип разделения прежде всего и в основном относится к вездесущности энергетического ресурса. Это может быть обеспечено также на обычном космическом аппарате путем создания солнечной батареи избыточной мощности, что приведет к использованию тяжелых аппаратурных модулей и вызовет, в свою очередь, необходимость использования тяжелых средств вывода. Частный выигрыш от использования космического аппарата, как показано на фиг.4 и последующих чертежах, заключается в том, что данная возможность является его неотъемлемой чертой и достигается без увеличения стоимости ИСЗ.
Реферат
Изобретение относится к космическим аппаратам. Техническим результатом является улучшение функциональных характеристик. Сущность изобретения заключается в размещении образующего антенну элемента в плоскости, проходящей через центр Земли, например, в плоскости орбиты космического аппарата. Антенну (антенны) размещают на обеих сторонах элемента (11). Высота образующего антенну элемента (11) превышает его размер в направлении полета космического аппарата, благодаря чему данный космический аппарат естественным образом стабилизируется с использованием гравитационного градиента. Ячейки (13) солнечной батареи размещают на образующем антенну элементе (11) со стороны, повернутой к Солнцу в 6 часов и в 18 часов по местному времени на солнечно-синхронной орбите. Образующий антенну элемент (11) состоит из множества висящих на шарнирах панелей (14), на которых размещены средства фазового управления принимаемыми или передаваемыми электромагнитными волнами, причем эти средства состоят из множества датчиков приема сигналов навигационной системы GPS, размещенных на вышеупомянутых панелях (14) и позволяющих проводить измерение и последующую компенсацию, при помощи упомянутых фазовращателей, деформаций вышеупомянутого элемента. Во время запуска панели складываются в удлиненную цилиндрическую оболочку, расположенную вдоль продольной оси ракеты-носителя и оснащенную пиротехническим отсоединителем, обеспечивающим развертывание панелей. На орбите данная оболочка образовывает аппаратурный модуль, объединяющий все блоки оборудования, отличные от панелей. 41 з.п. ф-лы, 14 ил.

Формула
Документы, цитированные в отчёте о поиске
Космическая телекоммуникационная система
Комментарии