Взлетно-посадочное устройство беспилотного летательного аппарата корабельного базирования - RU180260U1
Код документа: RU180260U1
Чертежи


Описание
Полезная модель относится к устройствам для взлета и посадки беспилотных воздушных аппаратов и предназначена для обеспечения применения беспилотных летательных аппаратов на кораблях.
Известны следующие устройства для взлета и посадки БЛА «Способ дистанционного запуска беспилотного летательного аппарата с помощью газовой катапульты» [см. патент РФ 2497725]. В этом способе для разгона БЛА на старте используется цилиндр, в него под давлением нагнетается воздух, который давит на рабочий поршень цилиндра, к которому подсоединен привод запуска БЛА в результате разгона поршня в цилиндре происходит разгон тележки запуска, на которой расположен БЛА, при достижении конечного участка происходит отцеп БЛА и его самостоятельный полет. Однако эта установка не обеспечивает посадку на палубу корабля, поэтому возможно приводнения БЛА на парашюте, что не устраняет сложность обнаружения БЛА и его подъемом на борт корабля.
Один из способов посадки и обнаружения БЛА «Способ посадки сверхлегкого беспилотного летательного аппарата» [см. патент RU 2307047, МПК: В64С 29]. При ударе об воду включается радиомаяк, и БЛА ищут по способу «охоты на лис», применяемому в спортивном ориентировании. Однако при этом не устраняются недостатки, связанные с подъемом БЛА на борт корабля.
Известны технические решения посадки БЛА «Способ посадки, на основе применения вертикальных мачт между которыми натянут трос» [см. патент США 7335067]. В этом способе для гашения кинетической энергии посадки БЛА используются два вертикальных цилиндра. Недостатки: для старта БЛА используется другое устройство, Частично устраняющим недостатки решений-аналогов, является взлетно-посадочное устройство и способ посадки БЛА вертикального взлета и посадки [см. патент РФ 2133210 «Беспилотный летательный аппарат», МПК: В64С 27/20].
Однако такой способ посадки не обеспечивает посадку на корабль более тяжелых БЛА, несущих на себе разного рода полезную нагрузку, а также БЛА, выполненных по «самолетной» схеме.
Возможным техническим решением, является способ взлета и посадки предложенный по программе DARPA США протестированный на экспериментальной ВПУ «400-pound testaircraft». Предложена посадка под кран-балку расположенную в верхней полусфере относительно БЛА, при этом зацеп БЛА осуществляется жестким фалом с гаком расположенным в верхней части фюзеляжа БЛА за трос-резинку взлетно-посадочного устройства. Взлет происходит за счет использования силы сжатия-растяжения троса-резинки, при этом БЛА подвешивается под штангу ВПУ. Недостатками вышеуказанного технического решения является сложность подъема БЛА в случае его приводнения, при этом система привязана строго к определенному типу БЛА по весовым характеристикам, невозможность применения одновременно БЛА более тяжелого класса и БЛА вертикального взлета и посадки, а также накладывает ограничения применения по погодным условиям.
Наиболее близким аналогом заявленной полезной модели является Взлетно-посадочное устройство БЛА корабельного базирования, состоящее из газового цилиндра с поршнем, управляемым клапаном и пусковой каретки, охарактеризованное в патенте RU 2497714 С2, опубликованным 10.11.2013.
Задачей, на решение которой направлено заявляемое устройство, является обеспечение безаварийного взлета и посадки широкого модельного ряда БЛА самолетного типа и БЛА выполненного по вертолетной схеме, имеющие различные весовые характеристики в условиях эксплуатации на кораблях, не имеющих свободную палубу в простых и сложных метеоусловиях.
Сущность, предложенного нами ВПУ, поясняется чертежами:
на фиг. 1 - состав и расположение ВПУ в режимах посадки и взлета;
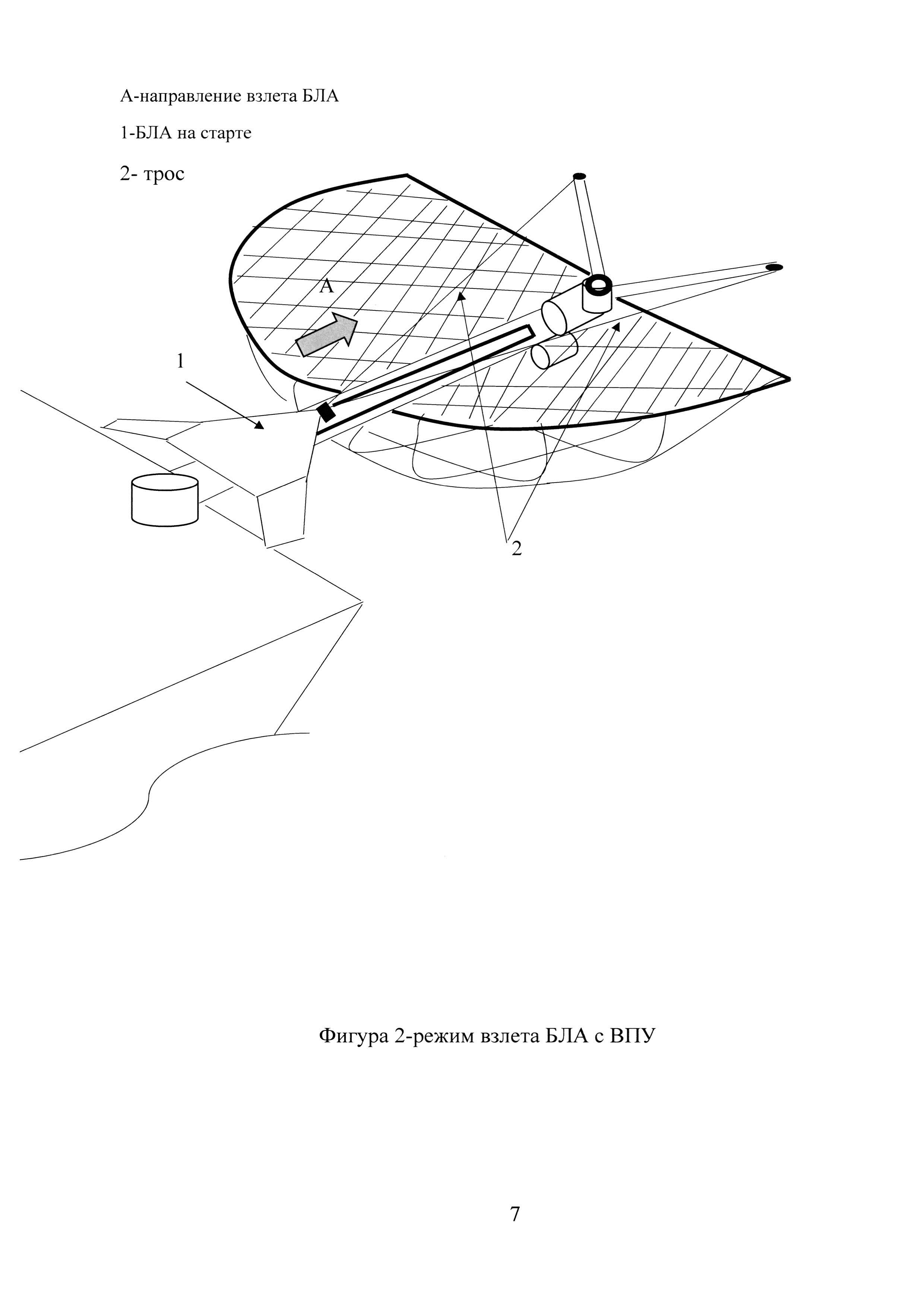
на фиг. 2 - режим взлета БЛА с ВПУ;
на фиг. 3 - режим посадки БЛА с ВПУ.
Рассматриваемое взлетно-посадочное устройство беспилотного летательного аппарата корабельного базирования включает в состав: газовый цилиндр 7 с одного конца жестко прикреплен к механизму стабилизации 1 ВП, который закреплен к силовому элементу палубы корабля. С другой стороны к газовому цилиндру 7 через шарнир крепится поворотная консоль 3 с приводом поворота в горизонтальной плоскости, к поворотной консоли жестко крепится V образное устройство захвата 8 изготовленное из высокопрочной стали с противоположной стороны раскладываемая сетка улавливатель 5 с подвижным посадочным полотном и страхующей сеткой. По центру поворотной консоли 3 расположен ИК-излучатель 11, который используется при посадке БЛА. К поршню 4 газового цилиндра 7 прикреплен трос 2 одним концом, другим концом через шарнир, поворотную консоль 3, вращающиеся металлические блоки 9 к устройству захвата 8.
Рассмотрим работу предлагаемого ВПУ в стартовом фиг. 1 (режим Б), фиг. 2 и посадочном фиг. 1 (режим А), фиг. 3 режимах.
В исходном состоянии газовый цилиндр 7 и прикрепленная к нему поворотная консоль 3 с сеткой улавливателем в сложенном положении находятся по-походному на борту корабля. Перед проведением старта(взлета) фиг. 1 (режим Б), фиг. 2 с помощью механизма стабилизации 1 разворачивают цилиндр 7, поворотную консоль 3 с сеткой улавливателем 5 и V-образным устройством захвата 8 на угол, оптимальный для взлета БЛА. Устанавливают на пусковую каретку БЛА и закрепляют стартовый-финишный трос, активируют устройство зацепа пусковой каретки, на которой установлен БЛА одновременно в цилиндр поступает инертный газ, который воздействует на рабочий поршень, под давлением газа происходит поступательное движение поршня, через трос движение передается пусковой каретке и разгоняет ее, в результате чего при прохождении кареткой всего рабочего пути, БЛА стартует и в сумме со скоростью корабля и ветра набирает необходимую скорость отрыва, происходит взлет БЛА.
Для приема на борт БЛА фиг. 1 (режим А), фиг. 3, совершающего посадку, устанавливают цилиндр 7 перпендикулярно борту корабля, а поворотную консоль 3, V-образное устройство захвата 8 и сетку улавливатель 5 параллельно борту корабля, при этом V-образное устройство захвата 8, и сетку улавливатель 5 можно разворачивать как в сторону юта, так и кормы корабля. ИК излучатель 13 конструктивно расположен по центру устройства захвата - старта. При прохождении БЛА с выпущенным устройством зацепа 12 происходит захват троса 2, который передает кинетическую энергию поступательного движения БЛА на поршень газового цилиндра, в результате движения которого в цилиндре возникает нелинейное демпфирование за счет вязкого трения путем выдавливания газа через регулируемый газовый клапан 10, что приводит к снижению посадочной скорости БЛА 11 и его финиширование на подвижное полотно сетки улавливателя 5. Для приема БЛА вертикального взлета и посадки микро и сверхлегкого классов разворачивают сетку улавливатель 5, устанавливают ее в горизонтальное положение. После посадки БЛА на сетку улавливатель 5 цилиндр 7 с помощью механизма стабилизации 1 подводят к борту и эвакуируют БЛА. Для того чтобы установка обеспечивала посадку БЛА с разным посадочным весом, применяется управляемый газовый клапан 10, который регулирует объем и скорость истечения газа из газового цилиндра. Посадка и фиксация БЛА происходит в сетке улавливателе, которая выполнена раскладной с подвижным посадочным полотном, направление сдвига посадочного полотна совпадает с направлением посадки. Взлет и посадка БЛА вертолетного типа происходит с сетки улавливателя, при этом подвижное полотно фиксируется в сетке улавливателе. В режиме посадки ВПУ стабилизируется и разворачивается перпендикулярно борту корабля, поворотная консоль с устройством захвата может быть развернута или в сторону носа или в сторону кормы корабля. Глиссада формируется путем пеленгации сигнала ИК-излучателя теплопеленгатором БЛА по курсу и тангажу. Окончательно сигналы управления по курсу и тангажу преобразуются в автопилоте и выдаются на рулевые машинки. При пролете БЛА через устройство захвата-старта происходит зацеп механизма БЛА за финишный трос, который одним концом крепится к устройству захвата, а другим концом через вращающийся блок и блок поворотного устройства крепится к поршню цилиндра, в камеру которого был закачен инертный газ. При старте БЛА происходит движение троса, который приводит в движение газовый поршень цилиндра. В результате возникающих демпфирующих сил в цилиндре происходит снижение посадочной скорости БЛА. Введение в состав ВПУ одного ИК-излучателя, механизма стабилизации в трех плоскостях, а также использование газового цилиндра как для торможения (посадки), так и для запуска (старта) БЛА, использование V-образного устройства захвата, троса, раскладной сетки улавливателя с подвижным полотном, обеспечивает создание вне корпуса корабля стабилизированной посадочной площадки. При этом вынос посадочной площадки за борт корабля на достаточном удалении от конструкций надстроек и антенн корабля и возможность поворота консоли взлетно-посадочного устройства в плоскости курса и тангажа упрощают условия взлета и посадки БЛА, как со стороны носа, так и кормы корабля. Использование одной зарядки катапульты в режиме старта и финиша, а также использование V-образного устройства захвата, расположенного на поворотной консоли, обеспечивает захват БЛА при посадке на корабль с разных курсовых углов посадки. Совокупность всех вышеперечисленных признаков в конечном итоге приводит к обеспечению автоматической безаварийной посадке БЛА на ограниченную площадку.
Реферат
Новшество предложенного технического решения заключается в использовании стабилизированного взлетно-посадочного устройства (ВПУ) в составе: газового цилиндра с регулируемым клапаном, V-образного устройства захвата, троса, поворотной консоли, сетки-улавливателя с подвижным посадочным полотном, используемых как в режиме старта, так и в режиме посадки. При взлете линейная скорость движения разгонной каретки, на которой установлен БЛА в сумме со скоростью корабля и скоростью ветра, обеспечивает БЛА необходимую взлетную скорость отрыва, а при посадке - сила трения троса, регулировка через газовый клапан энергии сжимаемого газа, в результате захвата зацепом БЛА троса V-образного устройства захвата, обеспечивает снижение кинетической энергии при посадке БЛА до нуля, а также использование сетки улавливателя с подвижным посадочным полотном, позволяющим осуществлять «мягкую» посадку БЛА. При этом для осуществления взлета и посадки БЛА вертолетного типа, подвижное полотно фиксируется, поворотное V-образное устройство захвата обеспечивает захват БЛА при посадке на корабль с разных курсовых углов. Для обеспечения точного выхода на курс глиссады применяется один ИК-излучатель, установленный по центру поворотной консоли. Стабилизация ВПУ устраняет влияние качки корабля на формирование устойчивой посадочной глиссады БЛА, при этом вынос посадочной площадки за борт корабля на достаточном удалении от конструкций надстроек и антенн корабля и возможность поворота взлетно-посадочного устройства в плоскости курса и тангажа расширяют возможности взлета и посадки БЛА дает возможность свободного ухода БЛА на повторный посадочный круг, таким образом, на основе анализа функционирования предложенного технического решения ВПУ можно заключить, что все эти новшества обладают преимуществами, отвечающими поставленной цели - обеспечение безопасного взлета и посадки различного класса БЛА, для эксплуатации на кораблях, не имеющих свободную палубу.
Комментарии