Устройство соединения реверсора тяги с турбодвигателем - RU2145667C1
Код документа: RU2145667C1
Чертежи







Описание
Изобретение относится к реверсорам тяги для летательных аппаратов с тягой турбодвигателем типа турбофан с двойным потоком и, в частности, к соединению между этим реверсором тяги и этим турбодвигателем.
Двигательная группа для летательных аппаратов состоит из окруженного капотом турбодвигателя, соединенного стойкой (опорой) с конструкцией летательного аппарата. Обычная форма капота представляет собой фигуру вращения вокруг геометрической оси турбодвигателя. Сам капот включает в себя несколько функциональных групп и, в частности, реверсор тяги, расположенный в середине и в задней части турбодвигателя. Исходя из очевидных соображений аэродинамики и облегчения конструкции, образующие капот группы представляют собой тонкие листовые конструкции и, вследствие этого, являются легко деформируемыми, несмотря на наличие элементов жесткости.
Для облегчения доступа к турбодвигателю и к механическим узлам реверсора, а также для облегчения установки турбодвигателя, образующие капот функциональные группы и, в частности, реверсор, оборудованы полукокилями, прикрепленными концевой частью к стойке шарнирами, приблизительно параллельными геометрической оси турбодвигателя, при этом полукокили запираются между собой в закрытом положении своей свободной концевой частью.
Для торможения летательного аппарата в полете, реверсор тяги временно отклоняет толкающий поток воздуха к верхней части турбодвигателя и, таким образом, подвергается воздействию значительной реактивной силы, направленной назад и параллельно геометрической оси турбодвигателя. Для того, чтобы разгрузить от этой реактивной силы шарниры, соединяющие полукокили реверсора со стойкой, а также разгрузить полукокили от напряжений, стремящихся осуществить продольный изгиб листов, эти полукокили в закрытом положении соединены с наружным корпусом турбодвигателя взаимопроникновением двух кольцевых связующих элементов по направлению движения в значительной мере в плоскости, перпендикулярной геометрической оси турбодвигателя, с вращением по геометрическим осям шарниров, при этом один из них представляет собой внутренний неподвижный связующий элемент, соединенный с наружным корпусом турбодвигателя, а второй представляет собой наружный подвижный элемент, соединенный с каждым из полукокилей реверсора. Неподвижный связующий элемент может представлять собой кольцевой желобок, например, в виде букв U или V, отверстие которого радиально повернуто кнаружи, в то время как подвижный связующий элемент образуется двумя распорками (контактными пластинами), каждая из которых соединена с полукокилем реверсора, при этом эти распорки имеют дополняющую желобок форму и входят в этот желобок при закрытом положении полукокилей реверсора. Необходимо отметить, что желобок может также располагаться на подвижном связующем элементе, а распорка - на неподвижном связующем элементе. Понятно, что при таком расположении осевая реактивная сила равномерно распределяется по всей поверхности окружности наружного корпуса и полукокилей реверсора. Понятно также, что такое расположение обеспечивает взаимную центровку турбодвигателя и реверсора.
Деформация полукокилей реверсора или любого элемента, создающего их жесткость, а именно, под воздействием центробежных радиальных нагрузок,
может вызвать разъединение распорок и желобка и, как следствие, разделение реверсора и турбодвигателя. Такое разделение может быть вызвано также нарушением динамического равновесия, например,
вследствие аварийного отрыва лопатки. Таким образом, проблема заключается в том, чтобы воспрепятствовать разделению распорок и желобка:
не создавая помех управляемому (произвольному)
открыванию полукокилей реверсора,
не утяжеляя значительным образом двигательную группу.
Для решения этой задачи, изобретением предлагается устройство соединения реверсора тяги
с турбодвигателем вышеописанного типа, отличающееся, тем, что оно состоит из:
а) поверхностей запирания или опорных поверхностей, повернутых радиально кнаружи и расположенных на наружных
связующих элементах,
б) множества запирающих язычков, расположенных на наружном корпусе турбодвигателя рядом с неподвижными связующими элементами и имеющих два положения:
закрытое
положение, в котором язычки находятся над опорной поверхностью, с ограниченным зазором,
открытое положение, в котором язычки не находятся над опорной поверхностью,
перемещение
каждого язычка осуществляется в значительной мере в плоскости, перпендикулярной геометрической прямой радиальной геометрической оси турбодвигателя, при этом эта геометрическая прямая проходит через
эту опорную поверхность в месте, где она покрывается язычком,
в) средств управления, перемещающих группу запирающих язычков между открытым и закрытым положением.
Так как язычки приходят в положение над наружной опорной поверхностью с ограниченным зазором, понятно, что эти язычки выполняют роль локального воспрепятствования радиальному удалению наружных соединительных элементов от внутренних соединительных элементов и, как следствие, воспрепятствованию разделения этих соединительных элементов под воздействием, в частности, центробежных радиальных нагрузок, образующихся в полукокилях реверсора.
Понятно также, что это соединение полукокилей реверсора с наружным корпусом позволяет компенсировать ограниченную жесткость этих полукокилей. Этот
эффект улучшается правильным распределением запирающих язычков вдоль окружности наружного корпуса с достаточной линейной плотностью. Все это позволяет:
или эксплуатировать реверсор с более
значительными нагрузками,
или уменьшить стойкость и жесткость собственно реверсора и, как следствие, его массу.
Понятно также, что средства управления позволяют быстро перевести запирающие язычки в "открытое" положение, то есть, как следствие, настоящее изобретение не мешает управляемому открытию полукокилей реверсора.
Удачным образом, запирающие
язычки выталкиваются в "закрытое" положение пружинами с силой, достаточной для преодоления мешающих сил, находящихся в средствах управления. Такое расположение позволяет одновременно:
препятствовать несвоевременному (неуместному) переходу язычков от "закрытого" к "открытому" положению, например, под воздействием вибраций в корпусе;
предупреждать забывание перевода язычков
в "закрытое" положение после закрытия кокилей реверсора.
По первому способу реализации изобретения, язычки смонтированы вращающимися на радиальных шарнирных осях и каждый из них снабжен управляющим рычагом, свободная концевая часть которого соединена с кабелем или коронной электросетью, которые, в свою очередь, соединены с управляющим рычагом. Каждый из язычков автоматически приводится в закрытое положение спиральной пружиной, расположенной концентрично шарнирной оси.
По предпочтительному способу реализации изобретения, как наиболее экономичному, язычки скользят в кольцевом желобке в направлении поступательного движения и каждый из них приводится в действие линейным кулачком, расположенным в кольцевом желобке, при этом сам кулачок приводится в поступательное движение рычагом.
По другому способу реализации изобретения, язычки приводятся в действие гидравлическими домкратами, не зависящими от гидравлической системы реверсора или управляемыми этой гидравлической системой реверсора. Гидравлические домкраты хорошо известны специалистам в данной области.
Изобретение будет лучше понято, и предоставляемые им
преимущества будут более очевидны при рассмотрении двух примеров реализации со ссылкой на чертежи в приложении, где:
На фигуре 1 показан вид спереди группы турбодвигателя и полукокилей
реверсора в открытом положении.
На фигуре 2 показан вид в продольном разрезе реверсора и турбодвигателя.
На фигуре 3 детально представлен вид в разрезе известного соединительного устройства.
На фигуре 4 представлен вид в разрезе первого примера реализации изобретения.
На фигуре 5 показан вид снаружи этого же примера реализации изобретения.
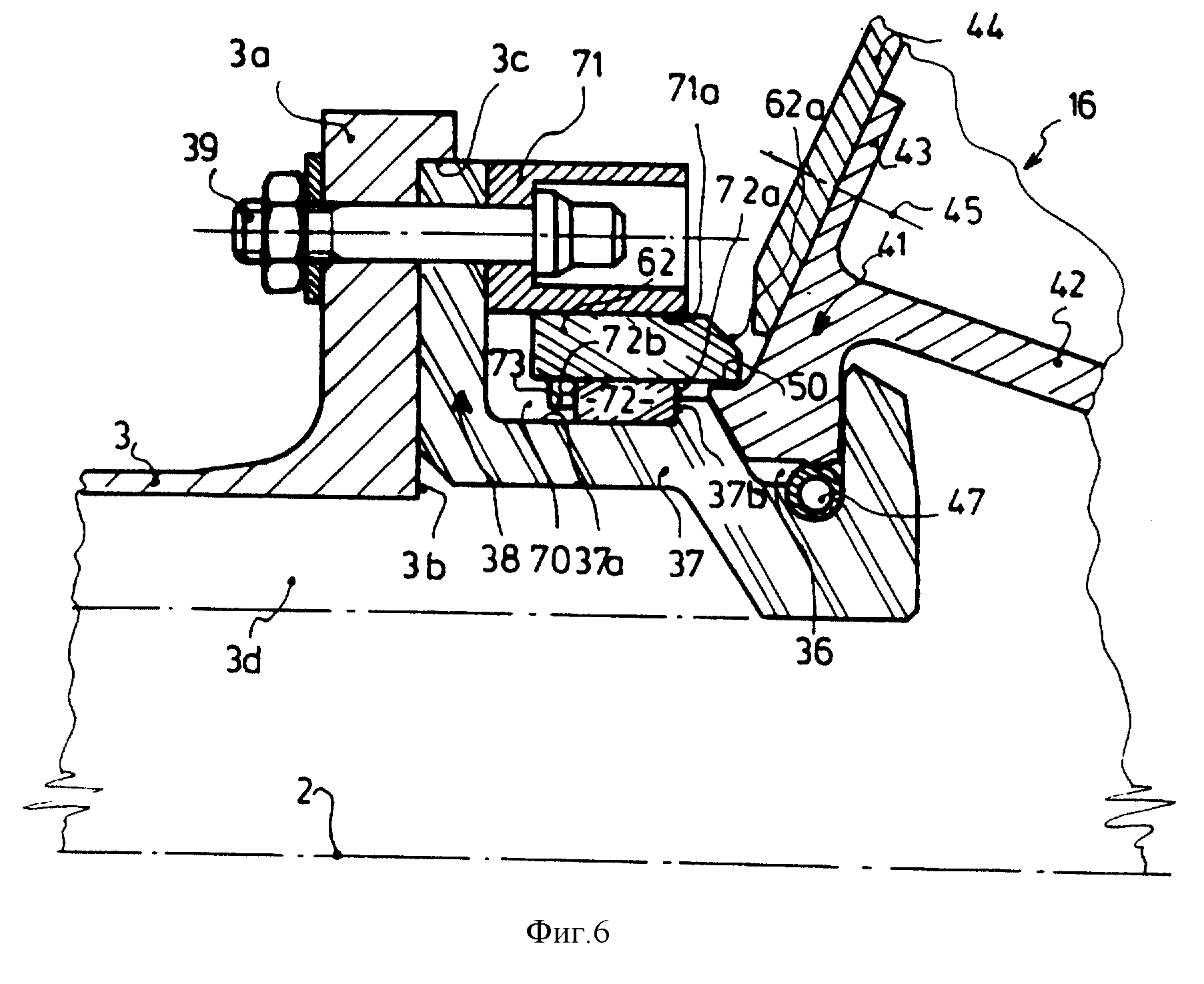
На фигуре 6 показан вид в разрезе предпочтительного примера реализации изобретения.
На фигуре 7 показан вид изнутри этого же примера реализации изобретения.
На фигуре 8 показан вид изнутри одного из вариантов реализации изобретения.
На фигуре 9 показан вид в разрезе примера реализации изобретения с гидравлическим домкратом и с вращающимися язычками.
На фигуре 10 показан вариант реализации изобретения с гидравлическим домкратом.
В первую очередь обратимся к фигуре 1. Турбодвигатель 1 с геометрической осью 2 представляет собой тип двигателя с двойным потоком и состоит из "воздуходувного корпуса" и внутреннего корпуса 4, соединенного с наружным корпусом 3 множеством кронштейнов (плеч, укосин) 5, при этом корпуса 3 и 4 имеют общую форму вращения вокруг геометрической оси 2. Турбодвигатель 1 прикреплен набором тяг 6 к стойке 10, опускающейся от крыла самолета, не показанного на фигуре 1.
Реверсор 15 состоит из двух полукокилей 16, одна концевая часть которых 17 шарнирно закреплена на стойке 10 набором шарниров 18, расположенных приблизительно параллельно геометрической оси 2. Два полукокиля 16 запираются между собой в закрытом положении своей другой концевой частью 19 и с помощью устройств запирания 20. Каждый полукокиль 16 удерживается в открытом положении подкосом (укосиной, подпоркой) 21, концевая часть 22 которого шарнирно закреплена на полукокиле 16, а другая концевая часть - на наружном корпусе 3.
Обратимся теперь к фигуре 2. Группа, называемая капотом 11, состоит в задней части из реверсора тяги 15, включающего два полукокиля 16, а в передней части - из воздухозаборника 12, включающего аналогичным образом два полукокиля 13, внутренние и наружные стенки 13а и 13б которых образуют аэродинамическую протяженность с внутренними и наружными стенками 16а и 16б полукокилей 16.
Учитывая, что реверсор тяги 15 при работе подвергается воздействию значительной реактивной силы 24, направленной от передней части к задней, группа турбодвигателя 1 и реверсора 15 включает также средства соединения 30 по направлению 24.
Обратимся теперь к фигуре 3. Наружный корпус 3 имеет на своей задней концевой части фланец 3а в виде короны, простирающейся радиально к наружной части и имеющей опорную поверхность 3б, перпендикулярную геометрической оси 2 и направленную назад, при этом поверхность 3б радиально ограничена по направлению к наружной стороне подпоркой (закраиной, буртиком) 3в. Внутренняя стенка корпуса 3 выложена акустическими пластинами 3г.
Средства соединения 30 состоят, в первую очередь, из внутреннего и неподвижного соединительного элемента 35 в форме кольца и соединенного с наружным корпусом 3. Внутренний соединительный элемент 35 сам состоит последовательно и, от конца к началу, из кольцевого желобка (выемки) 36, радиально повернутого кнаружи, цилиндрического участка 37 и фланца 38, выходящего для опоры на опорную поверхность 3б с центровкой подпоркой 3в, при этом, фланец 38 закреплен на фланце За множеством болтов 39, равномерно распределенных по всей окружности, образуемой фланцами 3а и 38, что позволяет передавать, без концентрации чрезмерных напряжений к корпусу 3, усилия, прилагаемые к желобку 36.
Соединительные средства 30 включают также наружные соединительные элементы 40, каждый из которых образуется распоркой (контактной пластиной) 41, соединенной с полукокилем 16, при этом распорка 41 помещается напротив желобка 36 и имеет форму, дополняющую форму желобка 36, и проникает в этот желобок при опускании полукокилей 16 в закрытое положение вращением вокруг их шарниров, обозначенных номером 18 на фигуре 1. Тороидальная прокладка 45 из эластомера расположена на дне желобка 36 и прижимается распоркой 41, что позволяет обеспечить воздушную герметичность между полукокилями 16 реверсора 15 и наружным корпусом 3.
Распорка 41 продолжается в боковом направлении фланцем 42, частично представленным на фигуре 3, и прикреплена болтами к узлу (окантовке) полукокиля 16, и также продолжается кнаружи вторым фланцем 43, соединенным с узлом (окантовкой) 44 полукокиля 16 болтами 45.
Обратимся теперь к фигуре 4. Распорка 41 имеет опорную поверхность или поверхность 50 в виде центрированной цилиндрической арки на геометрической оси 2, при этом эта опорная поверхность 50 радиально повернута кнаружи и высвобождена со стороны фланца 38. Калиброванная подкладка 51 опирается на опорную поверхность 50 и простирается крылом 52 вдоль узла (окантовки) 44, при этом крыло 52 соединено с фланцем 43 и с узлом (окантовкой) 44 болтами 45 и с узлом (окантовкой) 44 другим набором болтов 53, расположенных ближе к наружной части от болтов 45. Калиброванная подкладка 51 имеет также опорную поверхность или поверхность 54 в виде центрированной цилиндрической арки на геометрической оси 2, при этом эта опорная поверхность 54 радиально повернута кнаружи и высвобождена со стороны фланца 38.
Назначением калиброванной прокладки 51 является обеспечение опорной поверхности 54, эквивалентной опорной поверхности 51, соединенной таким образом с распоркой (контактной пластиной) 51, при этом опорная поверхность 54 радиально расположена более кнаружи от опорной поверхности 50.
Суппорт 60 имеет форму кольцевого участка, центрированного по геометрической оси 2, при этом суппорт 60 радиально выходит на опору на цилиндрический участок 37 неподвижного соединительного элемента 35, этот суппорт 60 также радиально выходит на опору на фланец 38 и соединен с этим фланцем 38, а также с фланцем 3а корпуса 3 болтами 39. Головки винтов болтов 39 утоплены в выемках 61 суппорта 60. Множество язычков 62 смонтированы вращающимися на этом суппорте 60, при этом вращение осуществляется по приблизительно радиальной геометрической оси вращения 63, то есть пересекающей и перпендикулярной геометрической оси 2. Для этого язычки 62 зашплинтованы, каждый, на оси шарнирного соединения 64, вращающейся в суппорте 60 по геометрической оси 63. Ось шарнирного соединения 64 выходит за суппорт 60, и вилка 65 тоже зашплинтована на этой оси шарнирного соединения 64. Эта вилка 65 приводится в действие устройствами (средствами) 66, способными обеспечить ее вращение по геометрической оси 63, при этом это движение вращения передается язычку 62 осью шарнирного соединения 64. Язычок 62 расположен в выемке 67, сделанной в суппорте 60, при этом эта выемка пересекается осью шарнирного соединения 64, язычок расположен в поступательном направлении, с зазором, ограниченным по геометрической оси 63 стенками выемки 67. Язычок 62 имеет также концевую часть 62а, проходящую над опорной поверхностью 54 в закрытом положении, при этом концевая часть 62а расположена в выемке 67 в открытом положении, при этом язычок 62 вращается от открытого положения к закрытому положению, и наоборот, по геометрической оси 63. Спиральная пружина 68 намотана вокруг оси шарнирного соединения 64 и имеет две ветви, соединенные соответственно с суппортом 60 и с вилкой 65, при этом пружина 68 подвергается предварительному напряжению скручивания с моментом, достаточным для автоматического перемещения концевой части 62а язычка 62 в положение над опорной поверхностью 54, что препятствует высвобождению распорки (контактной пластины) 41 из желобка 36 и, как следствие, препятствует открыванию полукокиля 16.
По одному из вариантов реализации, болты 39 смещены от осей шарнирного соединения 64, суппорт 60 - более низкий, а выемка 67 совмещается с выемкой 61, что приводит концевую часть 62а язычка 62 в положение над опорной поверхностью 50, на небольшом расстоянии от последней. Вследствие этого, калиброванная прокладка 51 становится ненужной и язычок 62 препятствует высвобождению распорки 41, действуя непосредственно на опорную поверхность 50.
Обратимся теперь к фигуре 5. В этом примере суппорт 60 имеет три язычка 62, каждый из которых приводится в действие пружиной 68 в направлении закрывания, а в направлении открывания - кабелем 66а, действующим на вилку 65, при этом это движение передается другим вилкам 65 через тяги 66б, при этом кабель 66б и тяги 66б образуют устройства срабатывания, обозначенные цифрой 66 на фигуре 4.
Обратимся теперь к фигуре 6. По предпочтительному способу реализации изобретения, язычок 62 скользит по салазкам 70 параллельно геометрической оси 2 таким образом, что концевая часть 62а язычка 62 в закрытом положении покрывает опорную поверхность 50 распорки 41 и высвобождает эту опорную поверхность в открытом положении.
Салазки 70 образуются наружной поверхностью 37а цилиндрического участка 37 и внутренней поверхностью 71а направляющей 71, соединенной болтами с фланцем 38 на фланце 3а корпуса 3. Поверхности 37а и 71а образуют участки цилиндрических поверхностей с образующими, которые параллельны между собой и параллельны геометрической оси 2. Кулачок 72 расположен между язычком 62 и поверхностью 37а. Как следствие, кулачок 72 и язычок 62 скользят напротив друг друга и между двух поверхностей 37а и 71а с ограниченным зазором. Цилиндрический участок 37 имеет также выступ (закраину) 37б, расположенную между поверхностью 37а и выемкой 36. Кулачок 72 приходит в опорное положение одним из своих фланцев 72а напротив выступа 37б, в то время как его противоположный фланец 72б контактирует с пионами (шашками, пешками) 73, соединенными с язычком 62 и расположенными радиально относительно геометрической оси 2. Понятно, что кулачок, перемещаясь по направлению, перпендикулярному плоскости фигуры 6, толкает назад язычок 62 посредством пиона 73, следствием чего является открытие опорной поверхности 50, что позволяет высвободить распорку 41 из желобка 36.
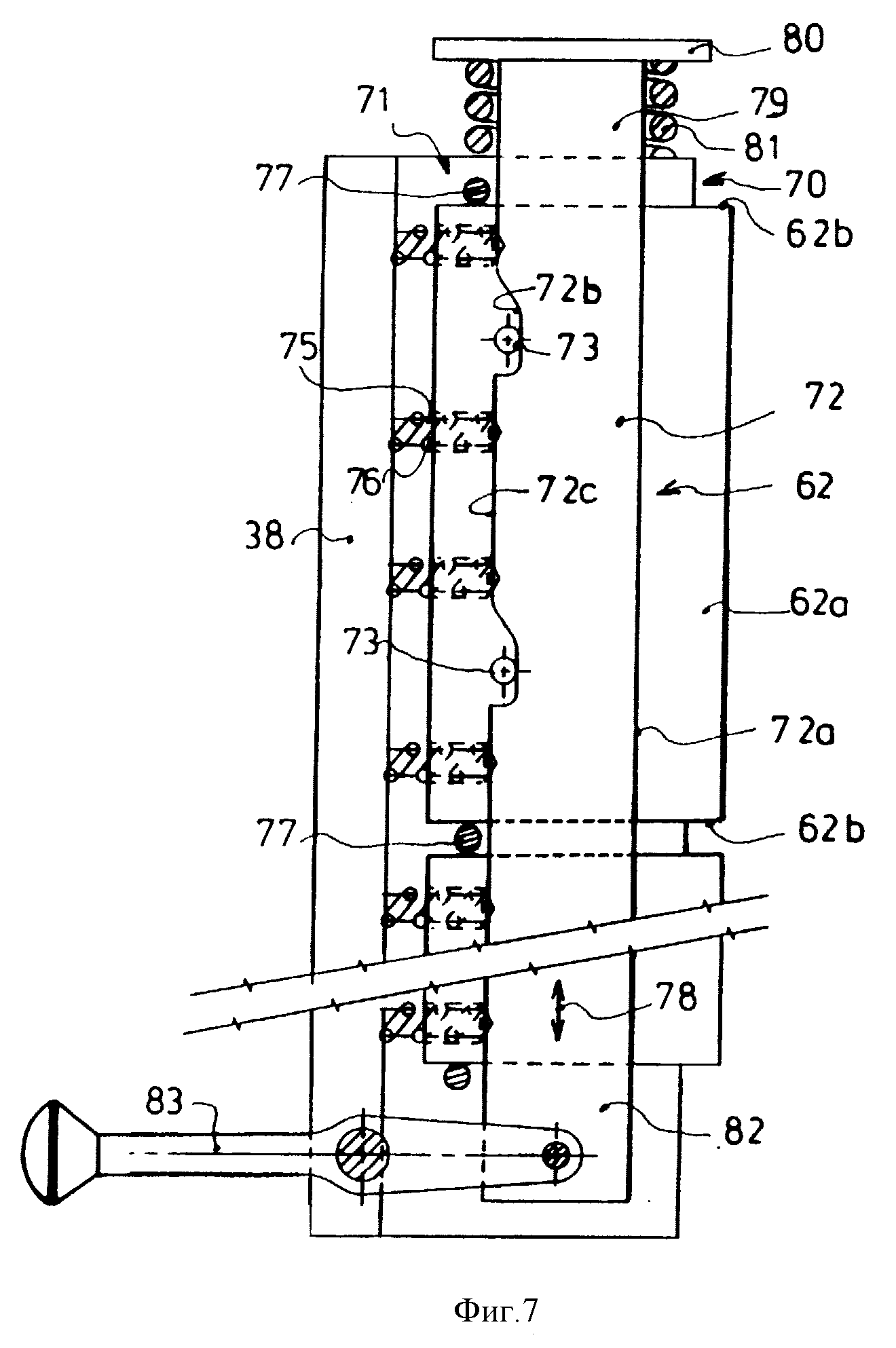
Обратимся теперь к фигуре 7. Множество цилиндрических штырей 75 вставлены в отверстия фланца 38 параллельно геометрической оси 2, не показанной на фигуре 7 и проникающей в соосные отверстия, просверленные в язычке 62. Спиральные пружины 76, расположенные вокруг пионов 75, опираются на фланец 35 и толкают в закрытое положение язычок 62, два пиона (шашка, пешка) 73 которого приходят в положение опоры на фланец 72б кулачка 72. Язычок 62 имеет прямоугольную форму, концевая часть 62а которой образует длину, а каждый из двух фланцев 62б образует ширину. Язычок 62 скользит от открытого положения к закрытому положению и, соответственно, двумя своими фланцами 62б между двух пионов 77, соединенных с цилиндрическим участком 37, не показанным на фигуре 7, при этом эти два пиона служат салазками.
Обратимся теперь одновременно к фигурам 6 и 7. Пружины 76 толкают язычок 62 к закрытому положению, при этом язычок 62 сам толкает двумя пионами 73 кулачок 72 к выступу 37б. При перемещении кулачка 72 по направлению 78 параллельно фланцу 38, язычок 62, удерживаемый пионами 77, скользит между открытым и закрытым положением по направлению, перпендикулярному направлению 78. Расстояние между пионами 77 и выступом 37б будет несколько больше ширины кулачка 72, взятой от его фланца 72а до противоположного фланца 72в, с тем, чтобы дополнить направляющую кулачка 72 к выступу 37б и воспрепятствовать непроизвольному (случайному) удалению этого кулачка 72 от выступа 37б, следствием чего может быть воспрепятствование полного прихода язычков 62 в закрытое положение. Кулачок 72 имеет концевую часть 79, выходящую за салазки 70. На этой концевой части 79 расположен выступ 80, а также пружина 81 в сжатом состоянии между выступом 80 и краем направляющей 70. Пружина 81 выполняет задачу приведения кулачка 72 в положение, соответствующее закрытому положению язычков 62.
На другой концевой части 82 кулачка 72 расположен рычаг 83, шарнирно закрепленный на концевой части 83 и на внутреннем соединительном элементе 35, например, на фланце 38. Рычаг 83 выполняет задачу перемещения кулачка 72 по направлению 78 для приведения язычков 62 в открытое или закрытое положение.
Удачным образом прямоугольные язычки 72 имеют длину между фланцами 62б по меньшей мере равную двум размерам ширины, при этом пионы 73 достаточно отклонены с тем, чтобы обеспечить устойчивость положения язычков.
Обратимся теперь к фигуре 8. По варианту реализации изобретения, приводящему к упрощению устройства, каждый из пионов 73 приходит теперь в косой желобок 85, что позволяет кулачку 72 также толкать язычки 62 к закрытому положению, опираясь своим фланцем 72в на пионы 77.
Удачным образом множество язычков 62, разделенных пионами 77 по изобретению, равномерно распределяются вдоль окружности наружного корпуса, обозначенного цифрой 3 на фигуре 6, с целью равномерного покрытия опорной поверхности 50 распорки 41 и воспрепятствования высвобождению распорки 41 из желобка 36, независимо от жесткости окружности полукокилей реверсора.
Понятно, что по предпочтительному способу реализации, изобретение хорошо подходит для использования язычков 62, с большой длиной между их фланцами 62б, что обеспечивает отличное покрытие опорной поверхности 50 каждой распорки 41.
Обратимся теперь к фигуре 9, где показан способ реализации изобретения, в котором язычок 62 управляется гидравлическим домкратом 90. Приведение в действие домкрата 90 перемещает поршень 91 в выдвинутое положение, при этом поршень вращением вокруг оси 95, смонтированной перпендикулярно плоскости разреза сечения, приводит концевую часть 62г язычка 62 в положение упора в стенку 60а суппорта 60, приводя таким образом концевую часть 62а язычка 62 в положение над опорной поверхностью 50, что препятствует высвобождению распорки 41 из желобка 36.
При нерабочем состоянии домкрата 90, его поршень 91 находится во втянутом положении и не осуществляет никакого воздействия на концевую часть 62а язычка 62. Пружина 93, опирающаяся одной стороной на суппорт 60, а другой стороной на концевую часть 62а язычка 62, приводит этот язычок в положение, позволяющее высвобождение распорки 41 и, как следствие, к открытию реверсора.
Можно рассмотреть различные логические схемы управления домкратом 90, например, в случае, когда поршень 91 удерживается в выпущенном положении под воздействием механической системы, такой как сжатая пружина, являющейся составной частью домкрата 90 или не являющейся его составной частью и соприкасающейся с концевой частью 62г, при этом концевая часть снабжена уклоном (рампой), расположенным напротив поршня 91, чтобы при закрытии реверсора позволить привести язычок 62 в положение, препятствующее высвобождению распорки 41 из желобка 36. В этом случае следствием приведения в действие домкрата 90 будет втягивание поршня 91 с тем, чтобы позволить язычку 62, под воздействием пружин 93, занять положение, позволяющее распорке 41 высвободиться из желобка 36.
Логическая схема управления домкратом 90 может быть соединена с логической схемой управления реверсором или самолетом, но можно также рассмотреть систему, при которой схема управления соединена со схемой управления домкратами корпуса, которые позволяют открывать два полукокиля 16 реверсора, при этом обычно это управление является ручным и независимым от системы реверсора. В этом случае язычок 62 удерживается в положении запирания, то есть в положении, препятствующем высвобождению распорки 41 из желобка 36, единственно за счет действия одной или нескольких пружин 93, расположенных под осью 95, при этом полезность домкрата 90 состоит в том, что он устанавливает язычок 62 в положение, позволяющее производить открытие двух полукокилей 16 реверсора. В этом случае также, при закрытии реверсора, сторона 41а распорки 40, скользящей по стороне 62а, убирает (втягивает) ее, до того момента, когда концевая часть 62а язычка 62 автоматически под воздействием пружин расположится над опорной поверхностью 50.
Обратимся теперь к фигуре 10. По другому способу реализации изобретения, с применением гидравлического домкрата, домкрат 90, при приведении его в действие, непосредственно управляет язычком 92, опорная поверхность которого 92а размещается под опорной поверхностью 60в суппорта 60, препятствуя высвобождению распорки 41 из желобка 36, при этом домкрат 90 расположен на опорной поверхности 50 и множество домкратов 90 распределены таким образом по наружным соединительным элементам и соединены с ними.
Необходимо отметить, что показанные на фигурах 9 и 10 системы могут одновременно устанавливаться в различных местах реверсора, выбираемых специалистом в этой области.
Необходимо также отметить, что применение домкратов гидравлического типа не является обязательным и возможно применение электрических или пневматических домкратов.
Понятно также, что в приведенных примерах реализации изобретения соответствующие роли распорки 41 и желобка 36 могут меняться (быть обратными).
Реферат
Устройство предназначено для соединения реверса тяги с турбодвигателем. Реверсор тяги состоит из двух шарнирно соединенных полукокилей. При этом данный реверсор тяги и корпус уже соединены взаимопроникновением внутренних соединительных элементов и наружных соединительных элементов, соответственно соединенных с корпусом и полукокилями. Наружные соединительные элементы имеют опорную поверхность, радиально повернутую кнаружи. Внутренние соединительные элементы имеют множество язычков, способных покрывать опорную поверхность в закрытом положении и освобождать эту опорную поверхность в открытом положении. Такое выполнение устройства позволит воспрепятствовать разделению распорок и желобка, не создавая помех управляемому (произвольному) открыванию полукокилей реверсора и не утяжеляя значительным образом двигательную группу. 2 с. и 10 з.п. ф-лы, 10 ил.

Комментарии