Способ и система для определения рабочего режима сельскохозяйственного транспортного средства и сельскохозяйственное транспортное средство - RU2754093C2
Код документа: RU2754093C2
Чертежи
Описание
Область техники
Изобретение относится к способу и системе для определения рабочего режима сельскохозяйственного транспортного средства в соответствии с пунктами 1 и 10 формулы изобретения.
Уровень техники
Сельскохозяйственные транспортные средства, в частности, тракторы, часто используются для работ по подготовке почвы, требующих большого тягового усилия, например, для вспахивания. Потери мощности при подобных тяжелых работах по обработке почвы обусловлены, в частности, проскальзыванием между грунтом и средствами сцепления с грунтом транспортного средства, а также сопротивлением качению средств сцепления с грунтом. В этом случае средства сцепления с грунтом могут быть реализованы в виде шин, в частности, пневматических шин и/или гусениц. На потери мощности может влиять изменение контактной зоны средств сцепления с грунтом, которое может быть достигнуто, например, путем изменения давления в шинах и/или регулировки балластировки сельскохозяйственного транспортного средства. Однако выбор подходящего давления в шинах и соответствующей балластировки транспортного средства представляют собой относительно сложную задачу даже для опытного оператора. В связи с этим часто предпринимались попытки уменьшить проскальзывание между грунтом и средствами сцепления с грунтом транспортного средства, направленные на уменьшение потерь мощности и увеличения так называемой эффективности тяги.
Патентная заявка WO 2016/045868 А1, имея целью помочь оператору в выборе соответствующей балластировки, раскрывает способ и систему для выбора и отображения одной из функций балластировки в условиях, когда сельскохозяйственное орудие установлено на сельскохозяйственном транспортном средстве. В этом случае тип установленного орудия определяет рабочие диапазоны до трех рабочих параметров, например, рабочей скорости, нагрузки на установленное орудие или мощности тягового двигателя транспортного средства. Функцию выбирают, в частности, в зависимости от преобладания или вероятности возникновения, то есть, например, параметрами балластировки, близкими к пороговым значениям, можно пренебречь. В этом случае давление в шинах можно регулировать в зависимости от выбранной функции балластировки. При этом, однако, представляется невыгодным вариант, в котором сохраненные параметры балластировки будут соответственно выбираться в зависимости от установленного орудия и основываться, в частности, лишь на предполагаемых средних значениях проскальзывания и сопротивления качению.
Раскрытие сущности изобретения
Таким образом, задачей настоящего изобретения является разработка способа и системы для определения рабочего режима сельскохозяйственного транспортного средства, что позволит более эффективно снизить потери мощности.
Задача изобретения решена признаками, раскрытыми в независимых пунктах 1 и 11 формулы изобретения. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы.
Изобретение относится к способу определения рабочего режима сельскохозяйственного транспортного средства, оснащенного средствами сцепления с грунтом, посредством которых транспортное средство опирается на грунт, тяговым двигателем, выполненным с возможностью привода средств сцепления с грунтом, датчиками для генерирования сигналов датчиков, причем сигнал датчика может быть сгенерирован как функция измеренного параметра транспортного средства, и вычислительным блоком для осуществления способа, а также получения и анализа, по меньшей мере, сигналов датчиков. Изобретение отличается тем, что в вычислительный блок вводят, по меньшей мере, один входной параметр, относящийся, в частности, к сцеплению между грунтом и средствами сцепления с грунтом, при этом вычислительный блок подготавливает, по меньшей мере, одну характеристическую диаграмму рабочих параметров транспортного средства на основании, по меньшей мере, одного входного параметра, причем оптимальный рабочий режим определяют на основании характеристической диаграммы и/или выводят из памяти с учетом положения транспортного средства, при этом вычислительный блок определяет текущий рабочий режим на основании полученных параметров транспортного средства, и текущий рабочий режим сравнивают с оптимальным рабочим режимом. Определение текущего рабочего режима и его сравнение с оптимальным рабочим режимом, который может быть получен, в частности, из характеристической диаграммы, адаптированной к реальным условиям эксплуатации, позволяет оператору адаптировать текущий рабочий режим к оптимальному рабочему режиму для данных условий почвы и/или уборки урожая. Это позволяет выгодным образом снизить потери мощности, обусловленные, например, проскальзыванием и/или сопротивлением качению, с учетом реальных условий работы, то есть повысить эффективность.
В предпочтительном варианте осуществления изобретения вычислительный блок определяет, отображает и/или, по меньшей мере, частично автоматически управляет изменениями рабочих параметров и/или параметров транспортного средства, необходимыми для достижения оптимального рабочего режима, на основании сравнения. В этом случае рабочий режим, в частности, оптимизируют непрерывно и/или автоматически, в частности, путем регулирования рабочих параметров и/или параметров транспортного средства. Это выгодно возможностью дополнительного снижения потерь мощности, обусловленных проскальзыванием и/или сопротивлением качению, с учетом реальных условий работы, то есть возможностью дополнительного повышения эффективности.
Характеристическую диаграмму, предпочтительно, получают на основании входных параметров путем вывода и/или адаптации сохраненной характеристической диаграммы. Определение оптимального рабочего режима можно ускорить за счет вывода сохраненной характеристической диаграммы, соответствующей введенным входным параметрам. Затраты на подготовку характеристической диаграммы можно снизить, адаптировав существующую сохраненную характеристическую диаграмму к введенным входным параметрам и, тем самым, к реальным условиям работы.
В предпочтительном варианте осуществления изобретения характеристическую диаграмму создают и сохраняют путем непрерывной и/или дискретной записи и сохранения текущих рабочих режимов и/или рабочих параметров. Поскольку характеристическую диаграмму создают на основании фактически записанных рабочих режимов и/или рабочих параметров, можно создать улучшенную характеристическую диаграмму, в частности учитывающую соответствующие данные о положении транспортного средства, а также данные, связанные с этим положением и/или обрабатываемым полем. Это выгодно возможностью дополнительного повышения точности характеристической диаграммы и определенного рабочего режима.
В следующем предпочтительном варианте способа оптимальный рабочий режим, найденный, в частности, по характеристической диаграмме, связывают с данными положения и сохраняют с возможностью последующего вызова. Таким образом, оптимальные рабочие режимы для введенных условий почвы и/или уборки урожая можно сохранять в зависимости от положения, что упрощает сравнение, в частности, позволяет обойтись без создания характеристической диаграммы.
В предпочтительном варианте способа создают и отображают графическое представление характеристической диаграммы рабочих параметров и/или параметров транспортного средства. В этом случае графическое представление может быть отображено в виде диаграмм и/или гистограмм, в частности, основанных на рабочих параметров. Это выгодно тем, что информацию, содержащуюся на характеристической диаграмме, в частности, текущий и/или оптимальный рабочий режим, можно визуально отображать на дисплее оператора в легко читаемом виде. Также можно выбирать и графически отображать предложенные действия, направленные на достижение оптимального рабочего режима.
В следующем предпочтительном варианте способа управление и/или регулирование отображаемого рабочего режима, рабочих параметров и/или параметров транспортного средства осуществляют путем взаимодействия с соответствующим графическим представлением рабочего режима и/или соответствующего параметра. Это можно реализовать, например, с помощью сенсорного экрана. В этом случае оператор выгодным образом может легко адаптировать отображаемый рабочий режим, рабочие параметры и/или параметры транспортного средства, что позволяет дополнительно снизить нагрузку на оператора.
Риск уплотнения почвы, предпочтительно, определяют способом, основанным на входных параметрах и/или рабочих параметрах. Это выгодно, например, тем, что оператору может быть своевременно выведено предупреждение о чрезмерном уплотнении грунта, что позволит предотвратить чрезмерное уплотнение почвы путем изменения рабочих параметров и/или параметров транспортного средства.
Предпочтительно, за рабочий параметр принимают коэффициент тяги, эффективность тяги, коэффициент сопротивления качению и/или проскальзывание. Предпочтительно, за параметр транспортного средства, основанный на показаниях датчиков, принимают давление в шинах, скорость колеса, тяговое усилие, усилие на колесе, нагрузку на ось, крутящий момент колеса и/или частоту вращения двигателя.
Кроме того, изобретение относится к системе для определения рабочего режима сельскохозяйственного транспортного средства, оснащенного средствами сцепления с грунтом, посредством которых транспортное средство опирается на грунт, тяговым двигателем, выполненным с возможностью привода средств сцепления с грунтом, датчиками для генерирования сигналов датчиков, причем сигнал датчика может быть сгенерирован как функция измеренного параметра транспортного средства, и вычислительным блоком для осуществления способа, а также получения и анализа, по меньшей мере, сигналов датчиков. Согласно изобретению, в вычислительный блок можно ввести, по меньшей мере, один входной параметр, относящийся, в частности, к сцеплению между грунтом и средствами сцепления с грунтом, вычислительный блок может подготовить, по меньшей мере, одну характеристическую диаграмму рабочих параметров транспортного средства на основании, по меньшей мере, одного входного параметра, оптимальный рабочий режим транспортного средства может быть определен на основании характеристической диаграммы и/или выведен из памяти на основании положения транспортного средства, кроме того, вычислительный блок может определить текущий рабочий режим на основании найденных параметров транспортного средства, в частности, полученных от датчиков данных, и текущий рабочий режим можно будет сравнить с оптимальным рабочим режимом. Определение текущего рабочего режима и его сравнение с оптимальным рабочим режимом, который может быть получен, в частности, из характеристической диаграммы, адаптированной к реальным условиям работы, позволяет оператору адаптировать текущий рабочий режим к оптимальному рабочему режиму для данных условий почвы и/или уборки урожая. Это позволяет выгодным образом снизить потери мощности, обусловленные, например, проскальзыванием и/или сопротивлением качению, с учетом реальных условий работы, то есть повысить эффективность.
В предпочтительном варианте осуществления системы вычислительный блок может определять, отображать и/или, по меньшей мере, частично автоматически управлять изменениями рабочих параметров и/или параметров транспортного средства, необходимыми для достижения оптимального рабочего режима, на основании сравнения. В этом случае рабочий режим, в частности, оптимизируют непрерывно и/или автоматически, в частности, путем регулировки рабочих параметров и/или параметров транспортного средства. Это выгодно возможностью дополнительного снижения потерь мощности, обусловленных проскальзыванием и/или сопротивлением качению, с учетом реальных условий работы, то есть возможностью дополнительного повышения эффективности.
Кроме того, изобретение относится к сельскохозяйственному транспортному средству с описанной системой определения рабочего режима, в частности, описанным выше способом, причем транспортное средство имеет возможность балластировки, регулируемую частоту вращения двигателя и/или возможность регулирования давления, по меньшей мере, в одном средстве сцепления с грунтом.
Краткое описание чертежей
Изобретение детально описано ниже со ссылкой на прилагаемые фигуры, на которых изображено:
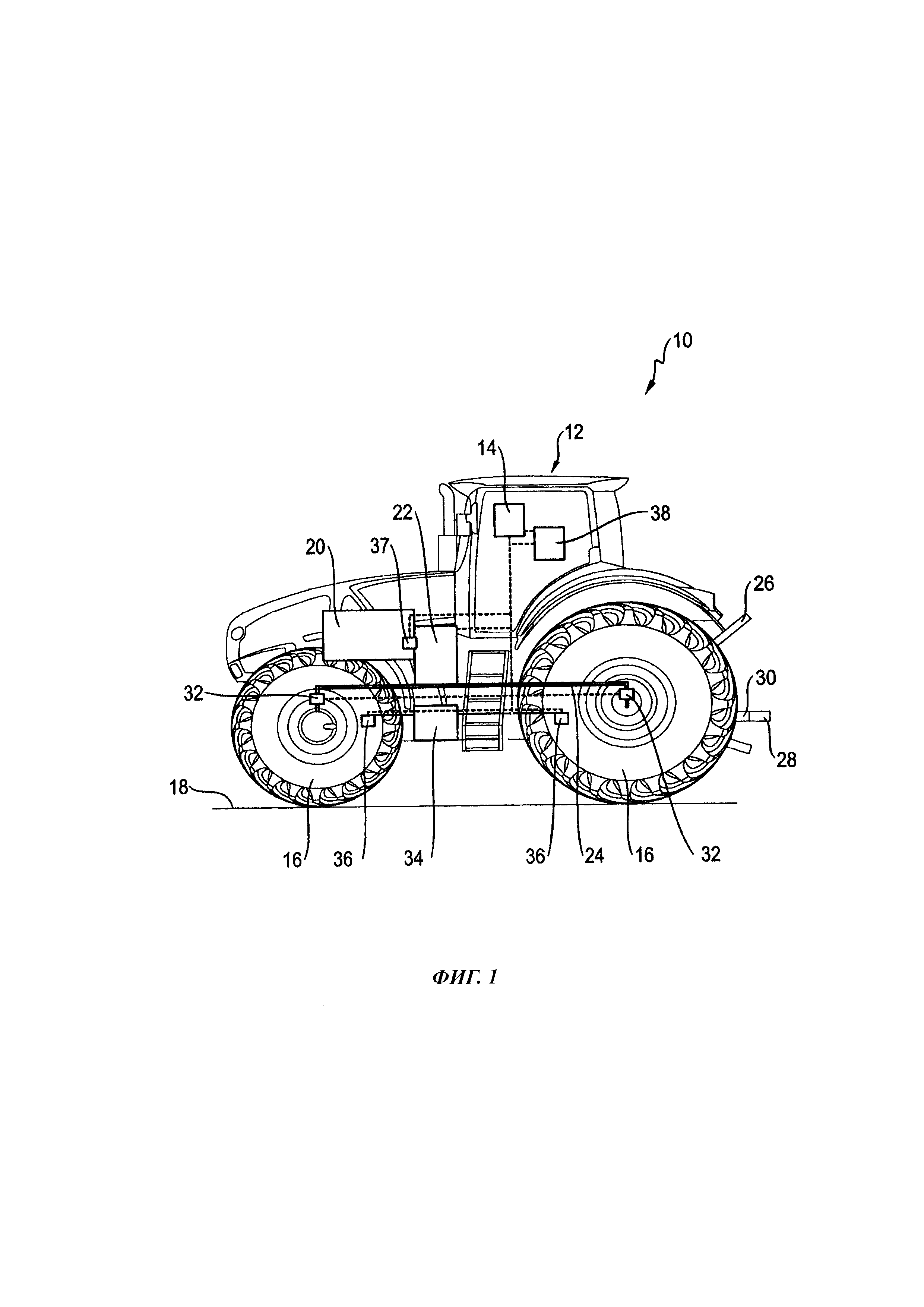
Фигура 1: схематичный вид сбоку сельскохозяйственного транспортного средства.
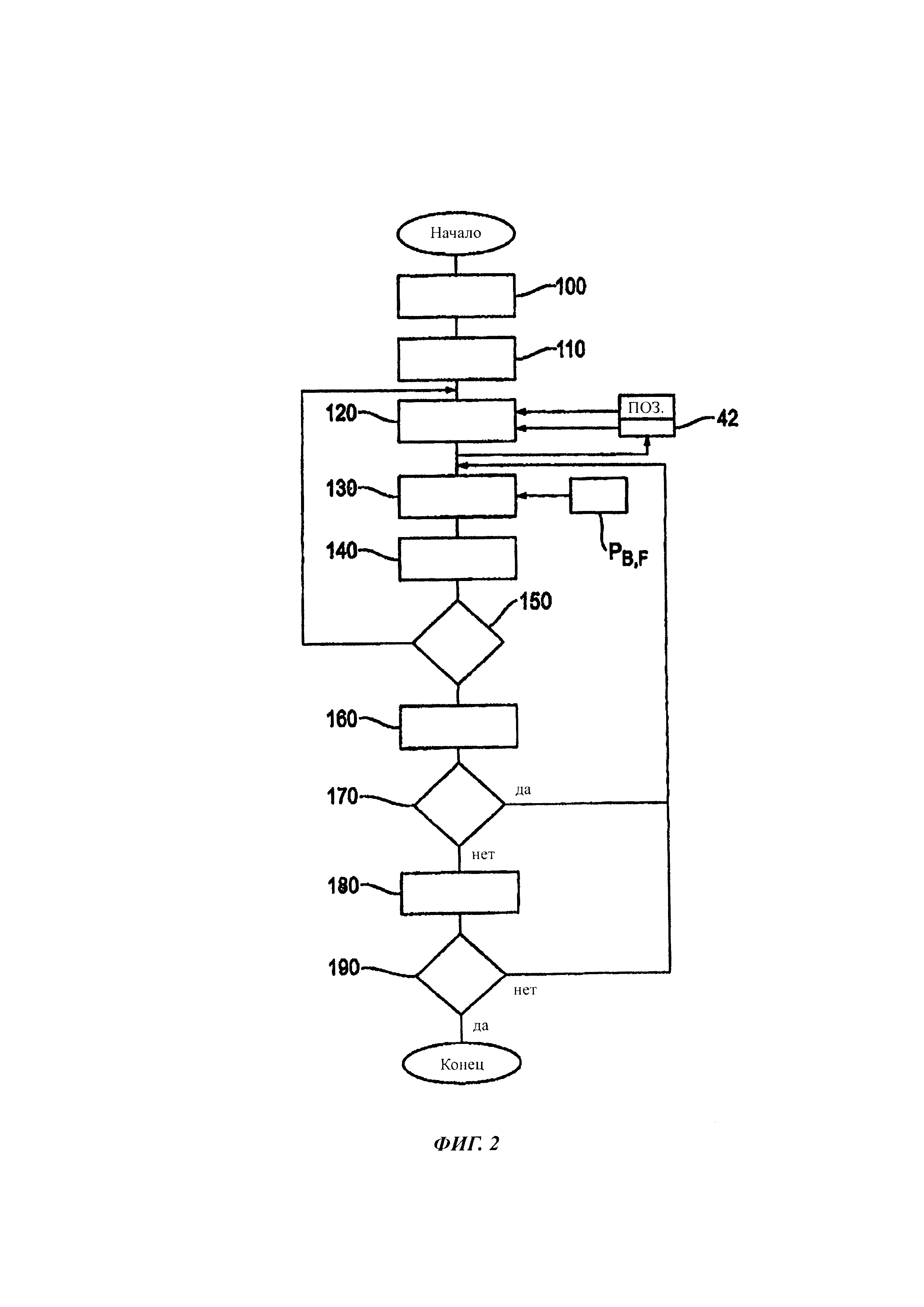
Фигура 2: блок-схема способа определения и регулирования рабочего режима.
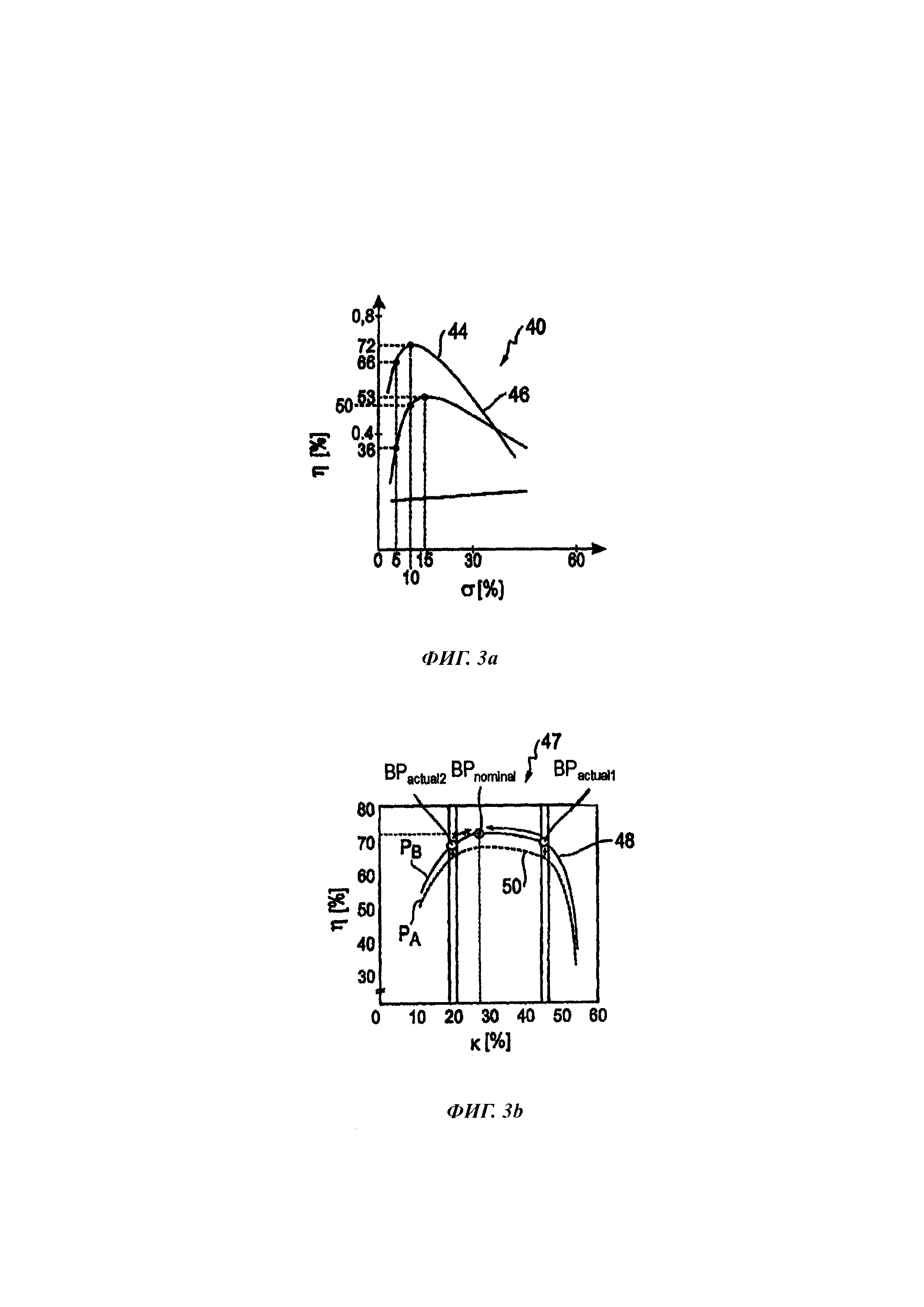
Фигура 3a: первая найденная характеристическая диаграмма.
Фигура 3b: вторая найденная характеристическая диаграмма.
Осуществление изобретения
На фигуре 1 представлен схематичный вид сбоку сельскохозяйственного транспортного средства 10, выполненного в виде трактора, причем предполагается, что специалист в данной области знаком с базовой конструкцией трактора. В контексте изобретения под сельскохозяйственным транспортным средством 10 может пониматься любое транспортное средство, пригодное для сельскохозяйственных работ, например, трактор, телескопический погрузчик, строительная машина или самоходный комбайн. Трактор имеет закрытую кабину 12 для размещения оператора, причем управляющий терминал 14, предназначенный для управления сельскохозяйственным транспортным средством 10, расположен в кабине 12 оператора. Сельскохозяйственное транспортное средство 10 содержит несколько средств 16 сцепления с грунтом в виде пневматических шин, установленных на передней и задней оси и сцепленных с почвой 18 для передачи тягового усилия. Средства 16 сцепления с грунтом приводятся от тягового двигателя 20, выполненного в виде двигателя внутреннего сгорания с датчиком 37 скорости, а также трансмиссией 22, взаимодействующей с тяговым двигателем. В этом случае трансмиссия 22 может быть выполнена, например, в виде гидромеханической трансмиссии с распределением мощности, содержащей гидростаты в канале гидравлической мощности. Выходной крутящий момент трансмиссии 22 поступает на средства 17 сцепления с грунтом посредством схематично изображенного приводного механизма 24, причем представленное сельскохозяйственное транспортное средство 10 выполнено в виде полноприводного транспортного средства.
Сельскохозяйственное транспортное средство 10 оснащено различными муфтами для буксировки сельскохозяйственных орудий (не показанных на фигуре), например, плуга или киповального пресса. В задней части показанного трактора имеется задний подъемник 26 и регулируемое дышло 28. Например, орудие, соединенное с регулируемым дышлом 28, создает тяговую нагрузку, воздействующую, по существу, на регулируемое дышло 28 в горизонтальном направлении и могущую быть измеренной датчиком 30 тяговой нагрузки. Колесные датчики 32, присоединенные к соответствующим средствам 16 сцепления с грунтом, позволяют, например, измерять скорость, усилие на колесе, крутящий момент колеса и/или нагрузку на ось, действующую на соответствующие средства 16 сцепления с грунтом. Кроме того, сельскохозяйственное транспортное средство 10 содержит систему 34 контроля давления в шинах, позволяющую регулировать соответствующее давление PA,B в средствах 16 сцепления с грунтом. Давление PA,B в средствах 16 сцепления с грунтом можно, соответственно, измерить с помощью датчика 36 давления. Сигналы, генерируемые датчиками 30, 32, 36, 37, могут поступать в вычислительный блок 38, где они будут преобразовываться в параметры транспортного средства, в частности, давление PA,B в средствах 16 сцепления с грунтом, частоту вращения колеса, тяговое усилие, усилие на колесе, нагрузку на ось, крутящий момент колеса и/или частоту вращения двигателя.
Согласно изобретению, по меньшей мере, один входной параметр PE можно ввести в вычислительный блок 38. Это может быть реализовано, например, с помощью управляющего терминала 14, соединенного с вычислительным блоком 38. В этом случае входной параметр PE может представлять собой тип почвы, влажность почвы, состояние сельскохозяйственной культуры, статус культуры, плотность почвы, текущее давление PA,B и/или тип средств сцепления с грунтом. Таким образом, оператор может инициировать метод определения и, в частности, регулирования рабочего режима BPactual,nominal для сельскохозяйственного транспортного средства 10.
Блок-схема этого способа представлена на фигуре 2. На первом этапе 100 осуществляется ввод входного параметра PE, например, оператором. Таким образом, оператор, по существу, вводит свойства почвы 18 в вычислительный блок 38. Эти входные параметры PE служат основой для подготовки, по меньшей мере, одной характеристической диаграммы 40, 47 на втором этапе 110 способа. Характеристическая диаграмма 40, 47 служит графическим представлением рабочих параметров PB, например, эффективности η тяги, коэффициента k тяги, коэффициента ζ сопротивления качению или проскальзывания

Таким образом, оптимальное проскальзывание

Если текущий рабочий режим BPactual отличается от оптимального рабочего режима BPnominal, текущий рабочий режим BPactual и оптимальный рабочий режим BPnominal после первого этапа 150 принятия решения графически отображаются на шестом этапе 160. Также можно отобразить характеристическую диаграмму, а также рабочие параметры PB и/или параметры PF транспортного средства. Если рабочими параметрами PB и/или параметрами PF транспортного средства необходимо управлять вручную, оператору потребуется настроить соответствующие параметры PB,F на следующем втором этапе 170 принятия решения, причем выполнение способа продолжается пятым этапом 140 после регулировки, предпринятой оператором.
Если оператор не должен управлять вручную соответствующими параметрами, способ продолжается седьмым этапом 180, на котором вычислительный блок 38 автоматически контролирует и корректирует параметры PF транспортного средства и/или рабочие параметры PB в целях достижения оптимального рабочего режима BPnominal. За седьмым шагом 180 следует третий этап 190 принятия решения, на котором система запрашивает, следует ли прекратить выполнение этого способа, например, при завершении обработки поля. Это может быть реализовано с помощью соответствующего пользовательского ввода, например, на управляющем терминале 14, или автоматически в зависимости от положения транспортного средства. Если прекращение выполнения способа не активировано или не выбрано, выполнение способа продолжается с четвертого этапа 130, на котором текущий рабочий режим BPactual определяется заново на основании измененных параметров PF транспортного средства и/или рабочих параметров PB.
На фигуре 3a показан пример двух перекрывающихся характеристик 44, 46 первой характеристической диаграммы 40, на которой эффективность η тяги показана как функция проскальзывания
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
Реферат
Изобретение относится к сельскохозяйственным транспортным средствам. В способе определения рабочего режима сельскохозяйственного транспортного средства в вычислительный блок вводят входной параметр, при этом вычислительный блок подготавливает характеристическую диаграмму рабочих параметров транспортного средства на основании входного параметра. Оптимальный рабочий режим определяют на основании характеристической диаграммы и/или выводят из памяти с учетом положения транспортного средства. Вычислительный блок определяет текущий рабочий режим на основании полученных параметров транспортного средства. Текущий рабочий режим сравнивают с оптимальным рабочим режимом. Регулируют отображаемый рабочий режим, рабочие параметры и/или параметры транспортного средства путем взаимодействия с соответствующим графическим представлением рабочего режима и/или соответствующего параметра. Повышается эффективность снижения потери мощности. 3 н. и 9 з.п. ф-лы, 3 ил.
Формула
