Универсальное транспортное средство повышенной грузоподъемности (варианты) - RU2585380C1
Код документа: RU2585380C1
Чертежи







Описание
Изобретение относится к транспортным средствам, а именно к устройствам управления транспортными средствами, и может найти применение при создании многофункциональных транспортных средств, предназначенных для выполнения различных работ в интересах решения широкого спектра специальных и народнохозяйственных задач.
Известно, что архимедова сила является основой плавучести и грузоподъемности надводных плавсредств, а также силой, препятствующей целевому маневру транспортного средства погрузиться глубже в среду своего нахождения (не говоря уже о переходе из среды менее плотной в среду с большей плотностью). Также известно, что для придания движения телу с малым по модулю значением плавучести требуются незначительные усилия. Для управления величиной архимедовой силы в воздухоплавании применялся подогрев воздуха - наполнителя воздушных шаров или уменьшение полетного веса путем сбрасывания за борт балластного груза. При этом ресурс для управления был весьма ограничен. Больше века назад появились транспортные средства с управляемой плавучестью. Подводные лодки наполняются забортной водой для увеличения своего походного веса и меняют глубину своего погружения, но при этом или сохраняют нулевую плавучесть и возможность движения, или приобретают отрицательную плавучесть и ложатся на дно. Механизм приобретения или увеличения положительной плавучести также известен: вытеснение забортной воды сжатым воздухом.
К современным транспортным средствам (ТС) предъявляются требования, которые носят часто противоположный характер. Например, перевозить больше груза при меньших энергетических затратах, при меньшем износе конструктивных элементов самого транспортного средства и предназначенной для него инфраструктуры, при минимальном (а лучше - нулевом) ущербе окружающей среде. А еще - быть универсальным в передвижении в различных средах без необходимости перевалки груза с одного вида транспортного средства на другое или для выполнения скрытого маневра.
Транспортного средства с такими качествами, выполненного в виде одно- или многомодульной конструкции пока не существует.
Известны различные технические решения, используемые в различных средах.
Известен дирижабль жесткой конструкции, содержащий негерметичный корпус, внутреннюю оболочку, объем которой состоит из секций первой части (А), обеспечивающей уравновешивание веса конструкции силой подъемного газа, и секций второй части (Б) в виде мягких полостей, выполненных с возможностью откачки сжатого подъемного газа компрессорами в резервуары пустотелых силовых элементов конструкции, выбранных из группы каркас, киль, элементы грузопассажирской гондолы, обеспечивающих уравновешивание полезной загрузки и выполнение маневра подъем-спуск, осуществляющих данный маневр за счет изменения объема подъемного газа путем перевода газа из сжатого состояния в свободное и обратно, при этом дирижабль для выполнения своих функциональных задач снабжен дизель-генераторами, электродвигателями с воздушными винтами реверсивного типа, изменяющими свое положение из горизонтального в вертикальное, расположенными на верхней части корпуса дирижабля, оборудованием для перевозки пассажиров и грузов как внутри корпуса, так и на внешней подвеске (патент РФ №2507111, МПК В64B 1/58, B64В 1/32, публикация 2006 г.).
Для изменения положения дирижабля в вертикальной плоскости с помощью компрессоров в емкости корпуса закачивается легкий горячий газ при подъеме и заменяется на наружный воздух при спуске. Для движения в горизонтальной плоскости, в т.ч. с изменением курса, применены электродвигатели, работающие от дизель-генераторов, для питания которых предусмотрены топливные емкости фиксированного объема. В силу последнего обстоятельства при конечном объеме корпуса, а, значит, и предельного значения архимедовой силы, грузоподъемность дирижабля и дальность его полета взаимно ограничивают друг друга.
Кроме того, большая протяженность корпуса в одном направлении существенно затрудняет маневрирование при изменении курса, т.к. требует весьма больших радиусов циркуляции.
Известен летательный аппарат с использованием подъемной силы несущего газа, выполненный с жестким корпусом, крыльями и двигателями для полета, при этом двигатели для полета работают на электрической энергии, вырабатываемой секционной канальной ветряной электрической станцией, которую располагают в служебных помещениях-секциях, которые размещены над сквозным секционным коническим ветряным каналом, и от энергии аккумуляторных батарей, которые также заряжают током, вырабатываемым электрической станцией, упомянутые батареи расположены в служебных изолированных герметических помещениях, секционный конический ветряной канал начинается с входного сопла, сечением превышающим сечение начального участка ветряного канала, и заканчивается выходным соплом меньшего сечения, оба сопла защищены предохранительными сетками, упомянутый канал размещен проходящим через центральную часть конструкции летательного аппарата, для технического обслуживания оборудования вдоль ветряного канала смонтирован служебный проход с доступом в упомянутые помещения, в оборудование секций включено ветряное колесо с горизонтальной осью вращения, промежуточные шкивы, ускоряющие скорость вращения генераторов, по меньшей мере один генератор, а также аккумуляторные батареи, в каждой последующей секции уменьшают поперечное сечение ветряного канала за счет уменьшения размера длины поперечного сечения ветряного канала при постоянной ширине, которая равна половине диаметра ветряного колеса, чем обеспечивают дополнительное ускорение ветряного потока в канале, при этом для обслуживания оборудования вдоль упомянутых секций и канала смонтирован служебный проход, который позволяет пройти в упомянутые помещения, мощность упомянутой электрической станции зависит от количества секций и размеров летательного аппарата, она обеспечивает упомянутые двигатели летательного аппарата и подзарядку аккумуляторных батарей (патент РФ №2478518, МПК B64В 1/00, F03D 9/02, публикация 2006 г.).
Аппарат включает жесткий корпус для создания архимедовой силы при заполнении его газом легче воздуха, крылья для создания дополнительной опоры на окружающий воздух при движении в горизонтальной плоскости (их емкости заранее заполнены легким газом), аккумуляторную батарею для питания электроприводов движителей в горизонтальной плоскости, ветряную электростанцию для подзарядки АКБ с ветряным колесом, размещенном в специальном ветряном канале, и отсек для размещения полезного груза с кабиной пилотирования.
Это решение по сравнению с предыдущим только добавило затрат мощности на преодоление сопротивления крыльев при подъеме, а многоступенчатая кинематическая схема увеличения скорости вращения ротора электрогенератора подзарядки АКБ от ветряного колеса существенно усложнила как саму конструкцию аппарата, так и его обслуживание и ремонтопригодность.
Известен дирижабль «Сибирь», содержащий элементы каркаса, оболочки и необходимые для функционирования узлы и системы, при этом он содержит размещенные друг над другом верхнюю, среднюю и нижнюю герметичные камеры, причем верхняя и нижняя камеры каркасного типа имеют фиксированный объем и выполнены с возможностью заполнения подъемным газом до состояния плавучести дирижабля, размещенная между ними средняя камера переменного объема выполнена с возможностью частичного или полного заполнения подъемным газом, а узлы и системы, необходимые для заполнения камер подъемным газом и для функционирования дирижабля, размещены преимущественно в нижней камере, каркас которой снабжен килевой балкой для восприятия статических и динамических нагрузок на дирижабль (патент РФ №107765, МПК B64В 1/100, публикация 2006 г.).
Корпус дирижабля включает расположенные друг над другом три герметичные камеры, способные заполняться горячим подъемным газом, причем средняя камера имеет переменный объем и может заполняться подъемным газом полностью или частично, в то время как две другие камеры фиксированных объемов заполняются газом полностью и предназначены для компенсации веса снаряженного аппарата без полезной нагрузки. Таким образом, грузоподъемность аппарата определяется максимальным значением емкости средней камеры, боковые панели которой снабжены окнами для регулируемого сброса остывшего подъемного газа и впуска в камеру забортного воздуха. В нижней камере, снабженной килевой балкой, размещены также узлы и системы, необходимые для функционирования дирижабля, и отсек для полезного груза. Что касается перемещения дирижабля в горизонтальной плоскости, то видимо предполагается использование авиационных двигателей с автономной системой энергоснабжения и управления полетом, что позволяет иметь ограниченный запас топлива, снижает дальность перелетов и полезную нагрузку. Снижению этих же параметров способствует применение высокотемпературного подъемного газа, поскольку для нагрева газа используется ограниченный запас не возобновляемого ресурса. Дополнительно, как следует из описания технического решения к патенту, для обслуживания дирижабля необходим ангар соответствующих размеров. И, тем не менее, по очень важной характеристике - разделению объемов, в которых создается архимедова сила, по назначению (компенсация веса снаряженного аппарата и подъем полезной нагрузки) именно дирижабль «Сибирь» может быть принят в качестве ближайшего аналога для воздушной среды.
Известно подводно-надводное транспортное средство проницаемого типа, содержащее корпус с днищем и отсеком для экипажа, имеющим по меньшей мере два отверстия для входа и выхода экипажа, силовую установку, содержащую по меньшей мере один двигатель, воздушную систему, балластную систему и систему управления, при этом транспортное средство дополнительно содержит систему обеспечения плавучести в надводном положении и механизм перемещения двигателей силовой установки по вертикали, днище имеет форму днища надводного транспортного средства, система обеспечения плавучести содержит расположенный в днище по меньшей мере один воздушный бак, соединенный с воздушной системой через по меньшей мере одно средство для подачи воздуха и по меньшей мере одно средство для выпуска воздуха и имеющий по меньшей мере одно отверстие для впуска и выпуска забортной воды (патент РФ №2191135, МПК B63С 11/46, B63G 8/00, B63В 1/00, публикация 2002).
Подводно-надводное транспортное средство содержит корпус с отсеком для экипажа, силовую установку, воздушную и балластную системы, а также систему управления. ТС выполнено с системой обеспечения плавучести в надводном положении и с механизмом перемещения двигателей силовой установки по вертикали. Положительным качеством этого решения является наличие на корпусе ТС приспособлений для транспортировки самого ТС по земле и/или по воздуху. Однако ТС не лишено и ряда недостатков: 1) энергоресурс ТС ограничен емкостью АКБ, заряжаемой перед походом, что определяет предельные время и дальность применения ТС; 2) для изменения положения ТС по вертикали используются вертикальные рули, потребляющие ресурс главной двигательной установки, т.е. снижающие ее к.п.д.; 3) применение силового руля для управления положением ТС в горизонтальной плоскости снижает его маневренность из-за большого радиуса циркуляции; 4) механизм перемещения двигателей силовой установки по вертикали для обеспечения эффективной работы движителей в надводном и в подводном положениях ТС является существенным усложнением конструкции и ведет к удорожанию обслуживания и ремонта ТС; 5) наличие воздушного бака любой геометрии, часть объема которого способна занимать забортная вода, а часть - воздух под переменным давлением, есть не что иное, как балластная цистерна подводной лодки и отличительным признаком быть не может.
Известен воднотранспортный модуль, содержащий корпус, закрытый металлической сеткой с килем снизу, обзорную часть с ограждением, к которой крепится фонарь, мачту и двигательный отсек, причем на оси корпуса смонтированы водные колеса, вращающиеся в горизонтальной плоскости посредством закрытого крышкой приводного механизма, при этом воднотранспортный модуль содержит шаговые электроприводы для изменения угла поворота лопастей восьми весел верхнего и нижнего колес, а выходы пульта оператора подключены к входам вычислительного блока, выходы которого подключены к входам контроллера электропривода постоянного тока и контроллера шагового электропривода, а выходы последних связаны с входами двух электродвигателей постоянного тока и двух шаговых электродвигателей (патент РФ №2415771, МПК B63В 35/00, B63G 8/00, B63С 1/49, публикация 2011).
Устройство содержит корпус, обзорную часть и двигательный отсек, в котором размещены энергетическая установка и устройства управления положением модуля в вертикальной и горизонтальной плоскостях. Последние представляют собою полые водные колеса, вращающиеся посредством приводного механизма, который через зубчатые колеса связывает валы двух электродвигателей постоянного тока с втулками полых водных колес, а для изменения углов лопастей весел относительно горизонта применена зубчатая кинематическая цепь, связывающая оси лопастей с валами шаговых электродвигателей. В горизонтальной плоскости модуль может изменять свою ориентацию с шагом 45°, что весьма грубо. Кроме того, управление положением модуля по вертикали с помощью изменения углового положения лопастей весел мало эффективно: при движении модуля в любом направлении только две из восьми лопастей создают вертикальную тягу, а каждая из шести остальных оказывает этому сопротивление с силой, зависящей от своего положения. Широкое применение кинематических цепей усложняет конструкцию, снижает к.п.д. силовой установки, удорожает обслуживание и ремонт самого модуля. Предложенная авторами схема управления положением модуля в пространстве не носит универсальный характер и не может быть применена для воздушной среды.
Известен также глубоководный аппарат, включающий корпус, в котором размещен продольный сквозной канал с носовой и кормовой шторками, установленными с возможностью вращения в горизонтальной плоскости и герметического перекрытия поперечного сечения продольного сквозного канала, при этом в корпусе установлен движительный рулевой комплекс, включающий гидравлические движители поворота и устранения крена, движительный рулевой комплекс снабжен приспособлением для получения электрической энергии из течения потока, которое расположено в продольном сквозном канале носового отсека (патент РФ №2440275, МПК B63G 8/00, публикация 2012).
Глубоководный аппарат включает корпус, в котором размещен продольный сквозной канал. В этом канале размещены приспособления движительного рулевого комплекса, предназначенные для получения электрической энергии из течения потока воды, проходящего по каналу. К числу очевидных недостатков такого решения следует отнести:
1) продольный сквозной канал предложенной геометрии имеет высокое гидравлическое сопротивление, что еще более снижает малую скорость течения потока в местах выполнения предполагаемых работ (для генерации ЭДС эта скорость должна быть не менее 3 м/с);
2) турбина с вертикальной осью вращения в горизонтальном канале создает гидравлическое сопротивление большее, нежели только лопатки турбины с горизонтальной осью вращения, соосной с осью канала потока;
3) рабочее положение аппарата не гарантирует совпадение оси канала и направления течения потока в месте выполнения работ, что также снижает эффективность получения электроэнергии от возобновляемого источника.
Однако большим достоинством предложенного технического решения является попытка пополнения энергоресурса за счет возобновляемого источника. Именно поэтому целесообразно рассматривать предложенное устройство в качестве ближайшего аналога для ТС в водной среде.
Задачей изобретения является создание различных вариантов транспортных средств, которые могут в значительной мере или почти полностью удовлетворить всем перечисленным выше требованиям. При этом важно гарантировать перемещение транспортного средства в вертикальной плоскости или его «вывешивание» для перемещения в горизонтальной плоскости (в последнем случае оно может носить вспомогательный характер). В качестве энергетических установок транспортных средств могут применяться любые известные приводы движителей, но в настоящем описании мы будем ориентироваться на использование электропривода. В состав предложенных вариантов ТС входят:
1) универсальное воздушное транспортное средство с системой динамического управления плавучестью, оснащенное оригинальной системой его пилотирования с применением, например, электрического привода тяговых движителей на базе использования возобновляемого источника энергии. Универсальное воздушное транспортное средство предназначается для решения разнообразных задач, таких как перевозка крупногабаритной техники, экскурсионные полеты, доставка к очагам возгорания и применение систем пожаротушения, доставка беспилотных аппаратов в район их применения, обработка больших сельскохозяйственных или лесных площадей и др.;
2) мобильная стартовая площадка для запуска ракет (т.н. «мягкий старт»), а также для запуска космических аппаратов и возможного приема их в будущем при спуске с околоземной орбиты («космический лифт») с системой динамического управления плавучестью, оснащенная оригинальной системой ее движения с применением, например, электрического привода тяговых движителей на базе использования возобновляемого источника энергии и другие варианты;
3) водное транспортное средство с системой динамического управления плавучестью, оригинальной системой управления его движением с применением, например, электрического привода тяговых движителей на базе использования возобновляемого источника энергии.
Сущность предлагаемых вариантов универсального транспортного средства заключается в следующем.
Транспортное средство повышенной грузоподъемности для воздушной среды включает транспортирующий модуль и соединенный с ним посредством узла соединения транспортируемый модуль, при этом транспортное средство использует в качестве движителя архимедову силу и двигатели с различного типа движителями, например пропеллерными, при этом транспортирующий модуль транспортного средства содержит кольцевое основание с расположенными по его окружности несколькими группами оболочек постоянного и переменного объема, оснащенными системами управления плавучестью, включающими запасы гелия и оборудование для его реверсивного перекачивания, двигатели с электроприводами, снабженные системами подзарядки их аккумуляторных батарей от возобновляемых источников энергии на проточных электрогенераторах, системы управления движением и внешнего контроля и устройства для перемещения транспортного средства по земле.
Транспортирующий модуль транспортного средства содержит набор тяговых электродвигателей движения в горизонтальной плоскости по одному или нескольким фиксированным курсам и два дополнительных двигателя для возможности корректировки фиксированного курса, а также тяговые двигатели движения в вертикальной плоскости для возможности фиксации положения транспортирующего модуля по высоте.
Транспортируемый модуль транспортного средства содержит емкость с полезным грузом, которая выполнена в виде универсального контейнера для перевозки различных грузов или в виде транспортируемого модуля транспортного средства для другой среды.
Транспортирующий модуль транспортного средства содержит приемную часть, а транспортируемый модуль содержит ответную часть узла соединения транспортирующего модуля с транспортируемым.
Транспортное средство повышенной грузоподъемности для воздушной среды большого разряжения включает транспортирующий модуль и соединенный с ним посредством узла соединения транспортируемый модуль, при этом транспортное средство использует в качестве движителя архимедову силу и двигатели с различного типа движителями, например пропеллерными, при этом транспортирующий модуль транспортного средства выполнен в виде мобильной стартовой площадки, причем транспортируемым модулем транспортного средства является запускаемый объект, содержащий основание, выполненное в виде эллипса с расположенными по его периметру несколькими группами оболочек постоянного и переменного объема, оснащенными системами управления плавучестью, включающими запасы гелия и оборудование для его реверсивного перекачивания, двигатели с электроприводами, снабженные системами подзарядки их аккумуляторных батарей от возобновляемых источников энергии на проточных электрогенераторах, системы управления движением и внешнего контроля и устройства для перемещения транспортного средства по земле.
Транспортирующий модуль транспортного средства содержит набор тяговых электродвигателей движения в горизонтальной плоскости по одному или нескольким фиксированным курсам и два дополнительных двигателя для возможности корректировки фиксированного курса, а также тяговые двигатели движения в вертикальной плоскости для возможности фиксации положения транспортирующего модуля по высоте.
Транспортирующий модуль транспортного средства содержит приемную часть, выполненную в виде ложемента, а транспортируемый модуль содержит ответную часть узла соединения транспортирующего модуля с транспортируемым.
Транспортное средство повышенной грузоподъемности для водной и/или подводной среды включает транспортирующий модуль и соединенный с ним посредством узла соединения транспортируемый модуль, при этом транспортное средство использует в качестве движителя архимедову силу и двигатели с различного типа движителями, например пропеллерными, причем транспортируемый модуль транспортного средства включает трансформируемый корпус, оснащенный системой управляемой плавучести, электроприводами с системами подзарядки их аккумуляторных батарей от возобновляемых источников энергии на проточных электрогенераторах и системами управления движением и внешнего контроля, а транспортируемый модуль жестко включен в объем транспортирующего модуля.
Транспортируемый модуль транспортного средства выполнен в виде одного из отсеков трансформируемого корпуса.
Сущность предлагаемых решений поясняется следующими чертежами.
На фиг. 1-11 представлено универсальное воздушное транспортное средство; на фиг. 12-15 представлено водное транспортное средство; на фиг. 16-17 представлена мобильная стартовая площадка для ракет (носителей).
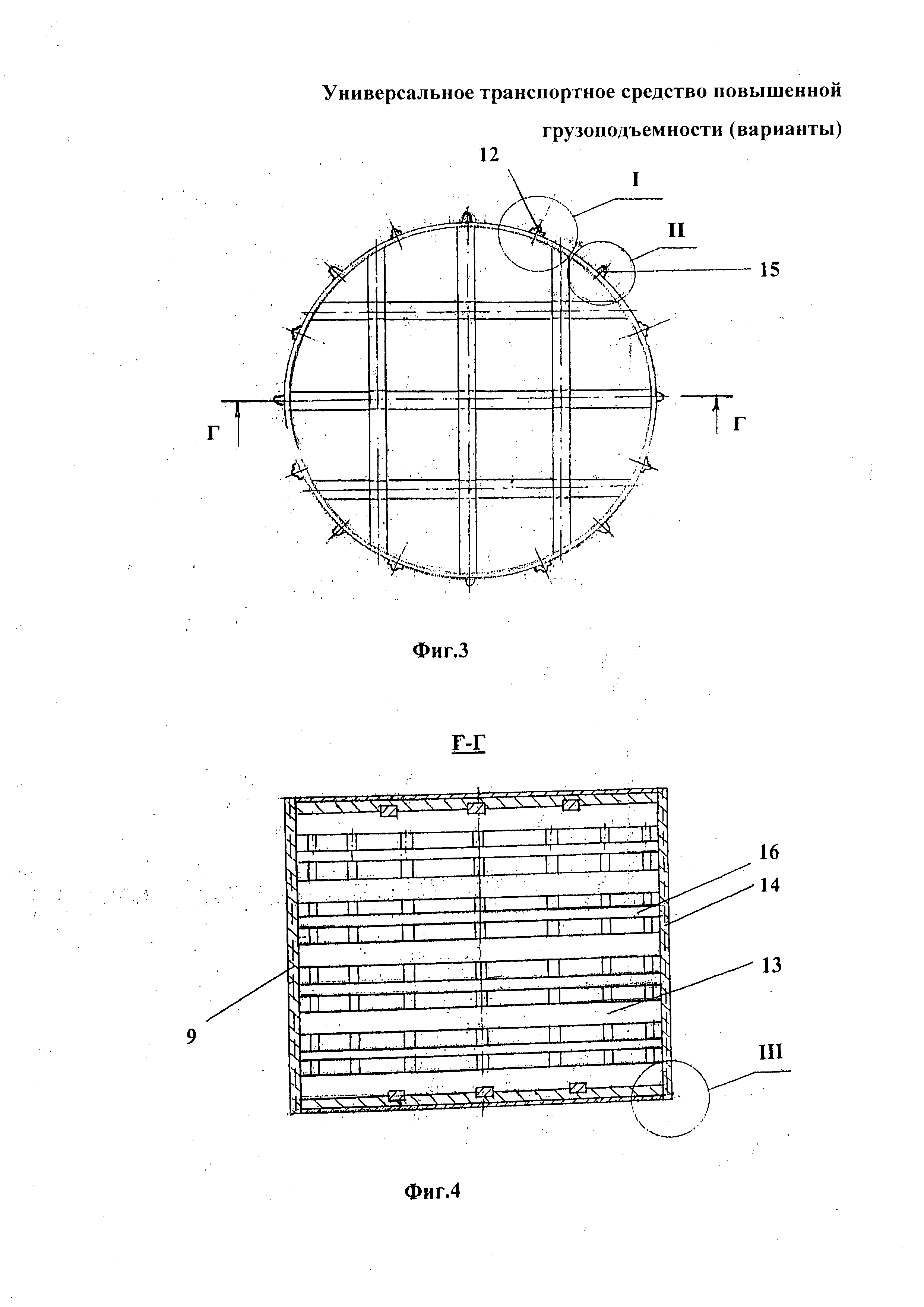
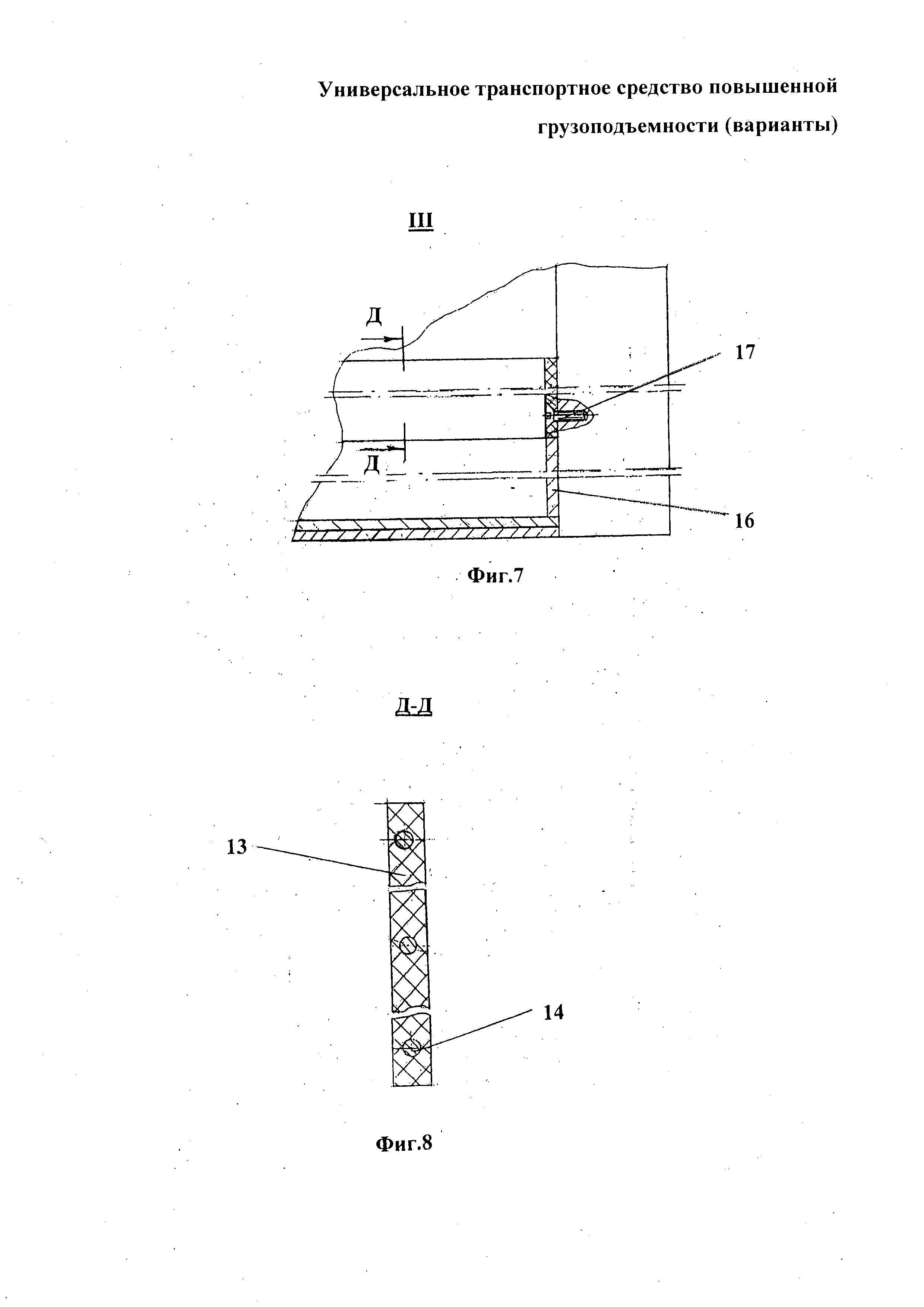
Универсальное воздушное транспортное средство (фиг. 1-11) состоит из двух модулей: транспортирующего и транспортируемого. Транспортирующий модуль представляет собою пространственный каркас 1 (фиг. 1, 2), выполненный, например, в виде ферм из легких сплавов, с размещенными на нем системой динамического управления плавучестью, комбинированной энергетической установкой, системой управления транспортным средством и контроля физических параметров окружающей его среды. Каркас представляет собой формирующее плоскость основание с закрепленными на нем по периферии емкостями с жидким гелием 2 (фиг. 2) и жестко соединенными с ними купольными конструкциями 3 (фиг. 1, 2) с кабиной пилотирования 4 (фиг. 1) в центре и отсеками оборудования 5 (фиг. 2) в нижней части купольных конструкций. Снизу каркас снабжен убирающимися колесными шасси 6 (фиг. 2) и узлами крепления 7 (фиг. 2, 9) транспортируемого модуля 8 (фиг. 2, 9). Для повышения жесткости и удобства эксплуатации каждая купольная конструкция 3 состоит из нескольких сваренных между собой секций 9 (фиг. 2, 4) со своими мягкими основными 10 (фиг. 2) и запасными 11 (фиг. 2) оболочками. Сама секция 9 (фиг. 3, 4) представляет собой жесткий каркас, одна часть элементов 12, 13 которого (фиг. 3, 4, 5, 8) выполнена из пластмассы, армированной стальными предварительно натянутыми тросами 14 (фиг. 4, 5, 7), а другая часть элементом 15, 16 (фиг. 3-7) из титанового сплава. Титановые элементы 15, 16 сварены между собой, пластмассовые элементы 12, 13 также сварены между собой, а группы этих элементов соединены винтами 17 (фиг. 7).
Система динамического управления плавучестью состоит из емкостей с жидким гелием 2 (фиг. 2), компрессоров, размещенных в отсеке оборудования 5 (фиг. 2) и соединенных трубопроводами с управляемыми клапанами с мягкими оболочками 10, 11 (фиг. 2), способными занимать при наполнении их гелием объем, ограниченный секциями купольных конструкций каркаса. Некоторые оболочки секций всегда заполнены гелием для почти полной компенсации «сухого» веса транспортирующего модуля, а объемы для создания подъемной архимедовой силы всего транспортного средства соединены упомянутыми трубопроводами через компрессоры с емкостями с жидким гелием. Управление плавучестью состоит в наполнении оболочек 10 или 11 гелием в количестве, необходимом для подъема транспортного средства на заданную высоту, удержании его в эшелоне движения по сигналам датчиков системы контроля физических параметров окружающей его среды и сжатии гелия из оболочек обратно в емкости со сжатым гелием для снижения транспортного средства. Каждая из оболочек 10 (11) снабжена своим комплектом оборудования, включающем емкость с жидким гелием 2 (фиг. 2), и размещенные в отсеке 5 (фиг. 2) трубопроводы, компрессор и систему управления, связанную электрически с общей системой управления транспортным средством (условно не показаны).
Комбинированная энергетическая установка состоит из аккумуляторных батарей, электроприводов движителей создания тяги в вертикальной и горизонтальной плоскостях и системы подзарядки аккумуляторных батарей в процессе движения транспортного средства. Аккумуляторные батареи (условно не показаны) устанавливаются в отсеке оборудования 5 (фиг. 2) транспортирующего модуля предварительно полностью заряженными.
Электроприводы с движителями создания тяги в вертикальной плоскости 18 (фиг. 2) установлены на площадках жестких купольных конструкций 3 каркаса 1, применяются для ускорения набора высоты транспортным средством при старте и для «зависания» без движения в горизонтальной плоскости, например, над очагом возгорания. Приводы 18 работают все одновременно под управлением системы управления транспортным средством.
Четное число реверсивных маршевых электроприводов с движителями создания тяги в горизонтальной плоскости 19 (фиг. 1) установлено на фермах плоскости основания каркаса 1 (фиг. 1) между купольными конструкциями 3 так, что углы между осями соседних электродвигателей равны между собой (на фиг. 1 этот угол равен 45°). При этом всегда найдется пара маршевых двигателей, оси которых совпадают (на фиг. 1 таких пар 4). Два реверсивных электропривода с движителями создания тяги в горизонтальной плоскости 20 (фиг. 1) установлены на диаметральной ферме плоскости основания каркаса 1 (фиг. 1) так, что их оси перпендикулярны оси фермы. При движении в горизонтальной плоскости работают одна или две пары двигателей: одна из пар маршевых двигателей 19 и пара двигателей 20 (в случае, если курс не совпадает с осью пары маршевых двигателей 19). Управление изменением курса осуществляется по команде пилота или программного устройства путем коммутации пар маршевых двигателей 19, оси которых наиболее близки по направлению к новому курсу («грубо»), и необходимого «подруливания» с помощью двигателей 20, совмещающих ось выбранной «грубо» пары 19 с новым курсом путем вращения транспортного средства вокруг его вертикальной оси в нужную сторону на малый угол («точно»), после чего двигатели 20 выключаются, а маршевые двигатели 19 работают в режиме «тяни-толкай» (для этого их пропеллеры вращаются в противоположные стороны). Применение такого приема в два этапа максимально сокращает радиус циркуляции и время совершения маневра. При небольших геометрических размерах транспортного средства изменение направления движения в горизонтальной плоскости может производится одной парой маршевых двигателей 20.
Система подзарядки аккумуляторных батарей в процессе движения транспортного средства состоит из групп 21 (фиг. 1, 2, 11) связанных между собою труб 22 (фиг. 11), расположенных вертикально, и 23 (фиг. 11), расположенных в горизонтальных плоскостях и ориентированных в направлении осей маршевых двигателей 19 (фиг. 1, 2). Группы 21 труб 22, 23 (фиг. 1, 2, 11) установлены на фермах плоскости основания каркаса 1 (фиг. 1, 2) снизу вокруг проекции купольных конструкций. Их общее количество должно обеспечивать необходимый уровень зарядки всех аккумуляторных батарей транспортного средства даже в случае, если воздушный поток через некоторые трубы 23 будет блокирован транспортируемым модулем. В каждой из труб 22, 23 (фиг. 11) установлены два проточных электрогенератора, электрически связанные с системой управления подзарядкой аккумуляторов, размещенной в отсеке оборудования 5 (условно не показаны). Таким образом, при движении транспортного средства в вертикальной плоскости подзарядку обеспечивают электрогенераторы всех труб 22 группы 21 (фиг. 11), а при движении в горизонтальной плоскости - две трубы 23 группы 21 (фиг. 11). Установленные в трубах 22, 23 проточные электрогенераторы аналогичны описанным в патенте РФ №2540888.
Универсальный транспортируемый модуль 8 (фиг. 2, 9, 10) выполнен в виде контейнера с закрепленными на его крыше механизмами 24 (фиг. 9, 10), например, с гидравлическим приводом, узлов крепления (фиг. 2, 9, 10) к основанию каркаса 1 (фиг. 1, 2, 9) транспортирующего модуля. Внутри контейнера размещаются и закрепляются объекты перевозки.
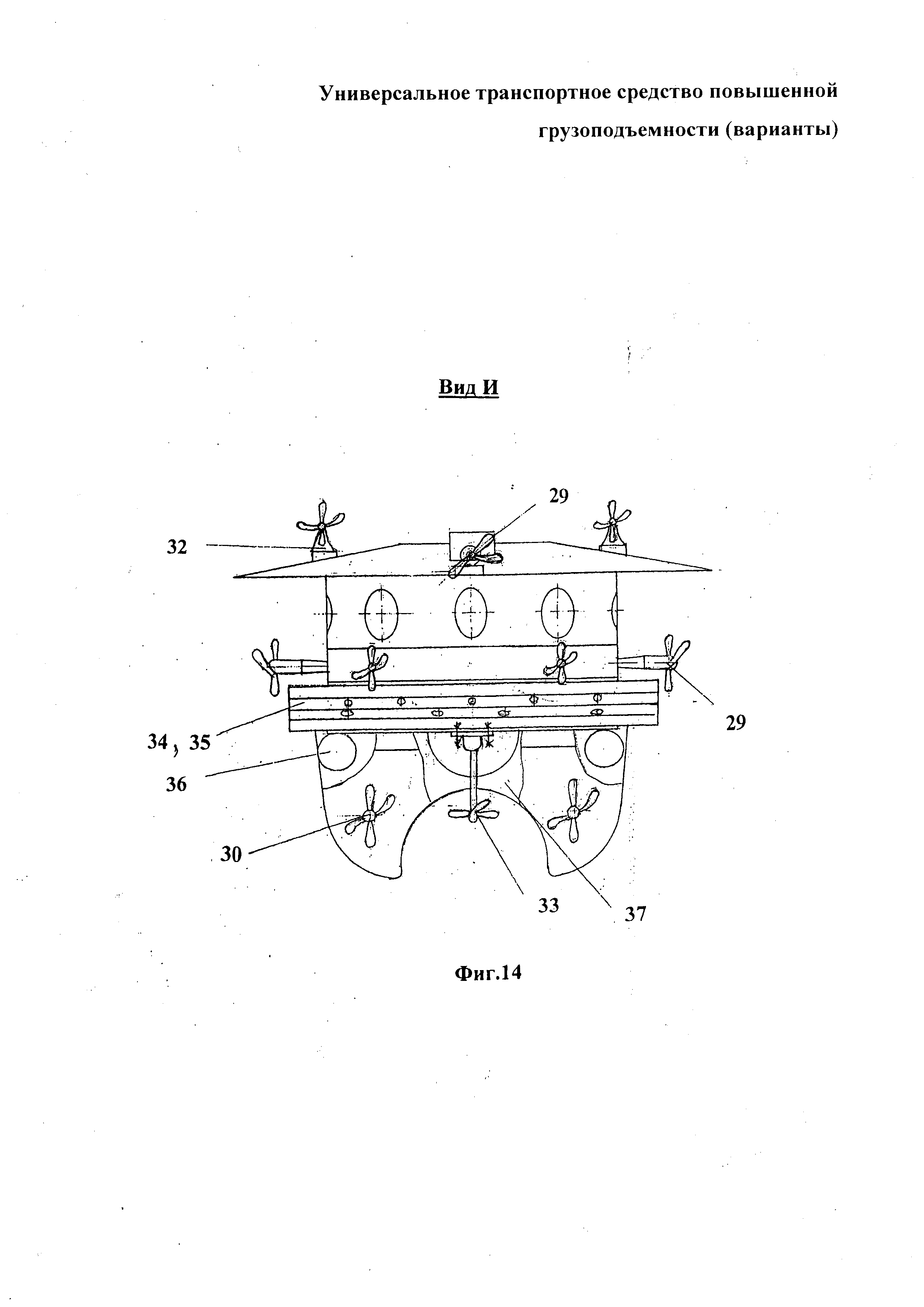
Водное транспортное средство (фиг. 12-15) выполнено, с одной стороны, как именно транспортное средство перемещения полезного груза по воде или под водой, с другой - как транспортируемый модуль универсального воздушного транспортного средства, описанного выше. Корпус (фиг. 12) из легких сплавов (а в будущем - из пластмасс, углепластика и т.п.) состоит из трех частей (средней - 25, носовой - 26 и комовой - 27), включает ряд отсеков, предназначенных для размещения в них энергетической установки, системы управления плавучестью, аппаратуры управления движением, полезного груза и кабины пилотов (в беспилотном варианте кабина может отсутствовать). При транспортировке водного ТС по воздуху части корпуса 26 и 27 подобно аппарелям надводных судов жестко закреплены на верхней части корпуса 25 замками 28 (фиг. 12) для уменьшения парусности. В походном положении все три части корпуса жестко соединяются друг с другом замками 28 (фиг. 12) через гидроизолирующую прокладку (условно не показана), образуя единый объем балластной цистерны. Энергетическая установка включает установленные маршевые электроприводы с винтами 29 (фиг. 12) для движения в горизонтальной плоскости по фиксированным векторам в подводном положении, маршевые электроприводы с винтами 30 (фиг. 12) для движения в горизонтальной плоскости в надводном положении, маршевый электропривод с винтом 31 (фиг. 13) для выполнения движений и маневрирования в горизонтальной плоскости на мелководье, приводы с винтами 32 (фиг. 13) для «подруливания», электропривод с винтом 33 (фиг. 14) для ускоренного движения аппарата в вертикальной плоскости, систему труб 34, 35 (фиг. 14) с установленными внутри электрогенераторами, а также аккумуляторные батареи (условно не показаны). Система подзарядки аккумуляторных батарей работает аналогично описанной системе универсального воздушного транспортного средства.
Система управления плавучестью включает баллоны 36 (фиг. 14) с сжатым воздухом, балластную емкость 37 (фиг. 14), компрессорную установку и аппаратуру управления (условно не показаны). Грузовой отсек 38 (фиг. 12) в варианте экскурсионного водного транспортного средства снабжен иллюминаторами и оборудован как пассажирский салон. На крыше грузового отсека смонтированы механизмы узлов крепления 71, 241 к каркасу 1 (фиг. 1, 2) транспортирующего модуля, аналогичные 7, 24 (фиг. 2, 9, 10) в универсальном воздушном транспортном средстве.
В исходном положении транспортному средству придана плавучесть, обеспечивающая принятие на борт максимальной проектной полезной нагрузки (при этом балластная емкость может быть и частично заполнена). При максимальной проектной загрузке транспортного средства запас положительной плавучести уменьшается до минимального значения. При сохранении малой положительной плавучести транспортное средство может двигаться в надводном положении, а при заполнении балластной емкости забортной водой - на требуемой глубине. «Юбка» 39 (фиг. 12) призвана повысить мореходные свойства транспортного средства при движении в подводном положении.
Подобное транспортное средство может представлять большой интерес, например, как экскурсионное подводное судно или как средство доставки беспилотных подводных аппаратов, оснащенных системой автономного и дистанционного управления движением, в район их применения.
Мобильная стартовая площадка для ракет (носителей) представлена на фиг. 16, 17.
Полезная нагрузка современных систем вывода аппаратов на космическую орбиту составляет не более 5% от их стартового веса. Известно, что существенно увеличить вес космического аппарата при снижении общего стартового веса системы вывода на орбиту возможно в случае старта из верхних слоев атмосферы. Для создания именно таких условий старта ракет-носителей и пуска ракет иного назначения предназначено транспортное средство «мобильная стартовая площадка».
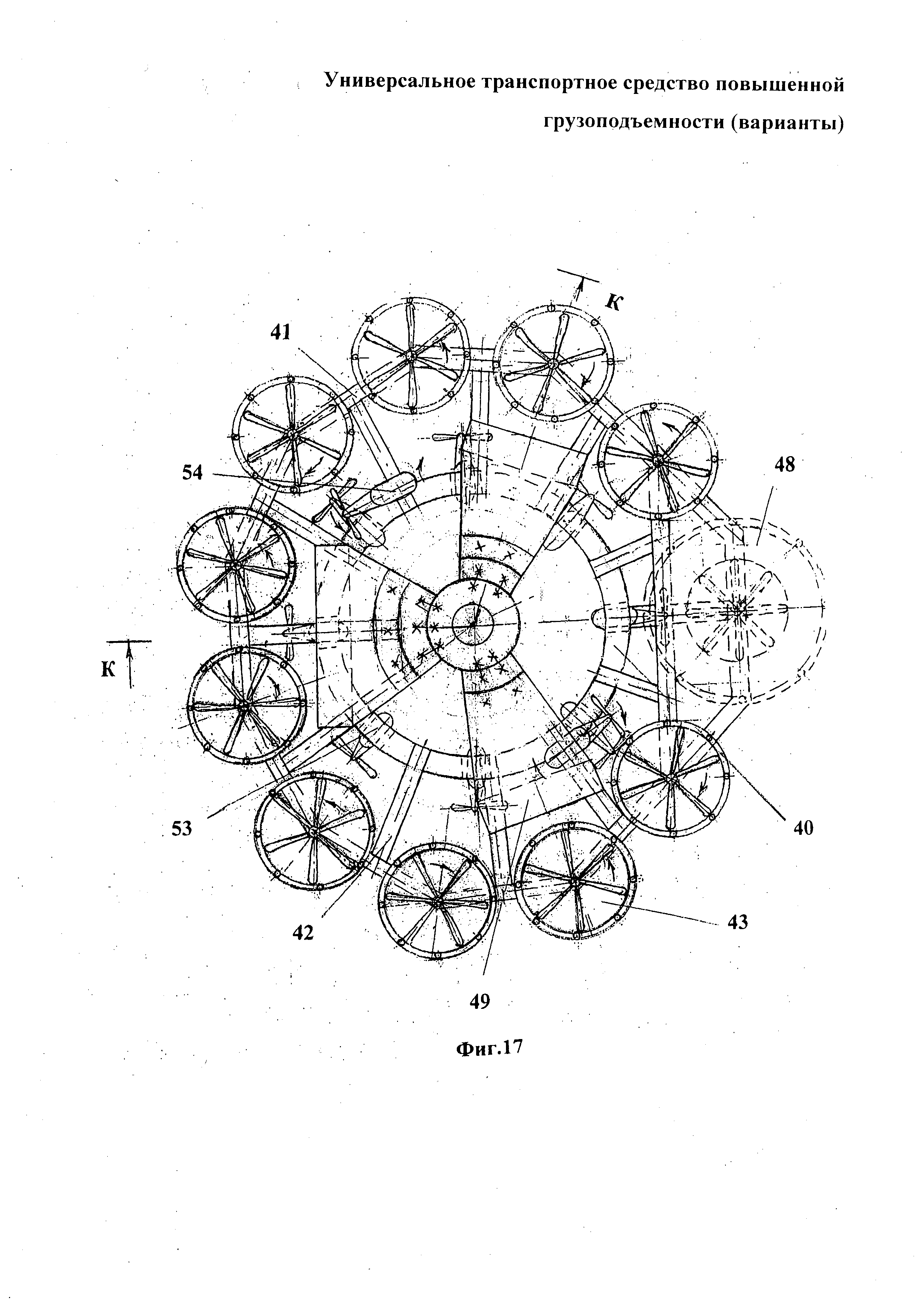
Структура мобильной стартовой площадки ракет идентична структуре универсального воздушного транспортного средства, но мобильная стартовая площадка отличается повышенной несущей способностью, а, следовательно, и большими габаритами. Основание из ферм легкого сплава образовано кольцом 40 (фиг. 16, 17), жестко соединенным с периферийными фермами 41 фермами радиального направления 42 (фиг. 16, 17). На периферийных фермах 41 (фиг. 16, 17) жестко установлены купольные конструкции 43 (фиг. 16, 17), состоящие из жестко соединенных между собой отсеков оборудования 44 (фиг. 16, 17, в них размещены аккумуляторные батареи, компрессорные установки и элементы системы управления транспортным средством (условно не показаны), емкостей с жидким гелием 45 (фиг. 16, 17), секций 46 (фиг. 16, 17) и соединенных между собой жестким бандажом 47 (фиг. 16, 17) на уровне верхней секции. При этом одна из купольных конструкций 48 (фиг. 16) имеет разъемное соединение, а остальные - неразъемные. Объем купольной конструкции 48 примерно вдвое больше объема конструкции 43. Кронштейны 49 (фиг. 16, 17), на которых закрепляется транспортируемый модуль, жестко установлены на фермах 42 (фиг. 16, 17) и снабжены устройствами для фиксации опор транспортируемого модуля. Снизу основание (40, 41, 42) снабжено колесными шасси 50 (фиг. 17).
Система динамического управления плавучестью полностью совпадает с аналогичной системой универсального воздушного транспортного средства, а в секциях 46 (фиг. 16, 17) размещены дублирующие оболочки 51 (фиг. 17) со своими системами управления перекачкой гелия в отсеках оборудования 44 (фиг. 16, 17).
Комбинированная энергетическая установка мобильной стартовой площадки также аналогична энергетической установке универсального воздушного транспортного средства. В ней применены электроприводы с движителями создания тяги в вертикальной плоскости 52 (фиг. 16, 17), винты которых вращаются в противоположных направлениях для придания большей устойчивости движению транспортного средства; четное число электроприводов с движителями создания тяги в горизонтальной плоскости 53 (фиг. 16, 17, маршевые двигатели), размещенные на кольце 40 (фиг. 16, 17) снизу, и пара двигателей 54 (фиг. 16, поворотные двигатели), размещенные на принадлежащих одному диаметру фермах 42 (фиг. 16, 17); система подзарядки аккумуляторных батарей в процессе движения транспортного средства полностью повторяет систему подзарядки аккумуляторных батарей в процессе движения универсального воздушного транспортного средства. Управление движением в пилотируемом или беспилотном вариантах уже было описано ранее.
Корпус транспортируемого модуля упрочняется двумя кольцевыми поясами 55 (фиг. 16), к которым крепятся опоры 56 (фиг. 16) с возможностью их отсоединения в результате срабатывания разрывных болтов 57 (фиг. 16).
Для снаряжения транспортирующего модуля купольная конструкция 48 (фиг. 17) отсоединяется от основания. Транспортируемый модуль с закрепленными на нем только верхними опорами 56 (фиг. 16) устанавливается и закрепляется на верхних опорах кронштейнов 49 (фиг. 16) транспортирующего модуля. Затем на транспортируемом модуле монтируются нижние опоры 56 (фиг. 16) и закрепляются на нижних опорах кронштейнов 49 (фиг. 16), а купольная конструкция 48 (фиг. 16) устанавливается и закрепляется на основании. После контроля правильности снаряжения транспортное средство готово к доставке транспортируемого модуля к месту старта.
Для старта достаточно, чтобы по команде оператора или программного устройства сработали разрывные болты 57 (фиг. 16), освободив ракету, и включился ее двигатель через расчетное время. За это время ракета должна упасть на расстояние, безопасное для транспортирующего модуля при начале движения ракеты. При этом сам транспортирующий модуль тоже может двигаться в направлении увеличения расстояния между ним и ракетой. После старта транспортирующий модуль возвращается на землю.
При появлении возможности торможения спускаемых аппаратов еще в высоких слоях атмосферы для его предельно плавного спуска можно направить несколько переоборудованный стартовый транспортирующий модуль. Такое переоборудование может состоять, например, в следующем: снимается купольная конструкция 48 (фиг. 17), закрепленная с помощью разъемных соединений; снимаются кронштейны 49 (фиг. 16) и устанавливается ложемент (условно не показан) для принятия спускаемого аппарата. Переоснащенный таким образом транспортирующий модуль заранее выводится в точку встречи со спускаемым аппаратом.
Реферат
Изобретение относится к транспортным средствам, перемещаемым по воздуху. Транспортное средство включает транспортирующий модуль и соединенный с ним посредством узла соединения транспортируемый модуль. Транспортное средство использует в качестве движителя архимедову силу и двигатели с различного типа движителями, например винтовыми. Транспортирующий модуль транспортного средства для воздушной среды содержит кольцевое основание с расположенными по его окружности несколькими группами оболочек постоянного и переменного объема, оснащенными системами управления плавучестью, двигатели с электроприводами, системы подзарядки аккумуляторных батарей от возобновляемых источников энергии на проточных электрогенераторах, системы управления движением и внешнего контроля и устройства для перемещения транспортного средства по земле. Транспортирующий модуль транспортного средства для водной и/или подводной среды включает трансформируемый корпус, оснащенный системой управляемой плавучести, электроприводами и системами управления движением и внешнего контроля. Грузовой отсек жестко включен в объем транспортируемого модуля. Достигается возможность создания экономичного универсального транспортного средства. 3 н. и 6 з.п. ф-лы, 17 ил.
Формула
Документы, цитированные в отчёте о поиске
Система управляемой плавучести и способ ее осуществления
Летательный аппарат на основе дирижабля с электродвигателем
Комментарии