Электродвигатель с обеспечением управления балансировкой дронов с двигателем внутреннего сгорания - RU2743768C1
Код документа: RU2743768C1
Чертежи
Описание
Уровень техники
- Дроны содержат электродвигатели.
- Дроны вырабатывают электроэнергию от двигателей внутреннего сгорания (ДВС) с генераторами и выполняют полет с использованием электродвигателей.
Преимущества дронов с электродвигателями:
1. Для сохранения балансировки дронов скорость вращения воздушных винтов должна быть отрегулирована согласно балансировке дронов. Это очень легко выполнить с помощью электродвигателей.
2. Электродвигатели могут вращаться на более высоких скоростях. Это дает преимущество использования воздушных винтов меньших размеров.
3. Пуск и останов электродвигателей обеспечивается быстро и с малыми затратами.
4. Дроны с электродвигателями могут быть изготовлены легко и недорого.
5. Дроны с электродвигателями могут быть изготовлены меньших размеров.
6. Производство дронов с электродвигателями проще.
Преимуществами дронов с электродвигателями, получающими электроэнергию от ДВС с генераторами:
Увеличена дальность полета дронов. Балансировкой дронов простото управлять, поскольку скорость вращения воздушных винтов, удерживающих дрон в воздухе, может быть отрегулирована быстрее и стабильнее.
Недостатки:
- Дроны с электродвигателями меньше находятся в воздухе.
- ДВС дронов с электродвигателями, получающими электроэнергию от ДВС, с генераторами, занимают большое пространство.
Разработанное изобретения и его цель
Увеличение продолжительности полета дронов посредством использования ДВС вместо электродвигателя, удерживающего дрон в воздухе. Однако при этом время отклика ДВС на увеличение или уменьшение скорости увеличивается, что затрудняет управление балансировкой дрона.
Для решения этой проблемы в рассматриваемом изобретении с целью сохранения балансировки дрона предлагается использовать электродвигатели, одновременно используя ДВС для удержания дрона в воздухе. С помощью этого способа увеличивается продолжительность полета и обеспечивается более стабильный и простой процесс балансировки.
Для увеличения продолжительности полета дронов вместо электродвигателей для удержания дрона в воздухе может быть использован ДВС. Также могут быть использованы газотурбинные (воздушно-реактивные) двигатели, так как они имеют большее количество оборотов в единицу времени.
Поскольку значение времени отклика ДВС велико, система поддерживает работу с электродвигателями для сохранения балансировки дрона.
Были разработаны три различные конструкции системы:
1. Система, содержащая электродвигатели, с функцией генератора.
2. Система, использующая генераторы независимо от электродвигателей.
3. Система, имеющая ДВС, электродвигатели и аккумуляторные батареи, не использующая ДВС для зарядки аккумуляторных батарей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
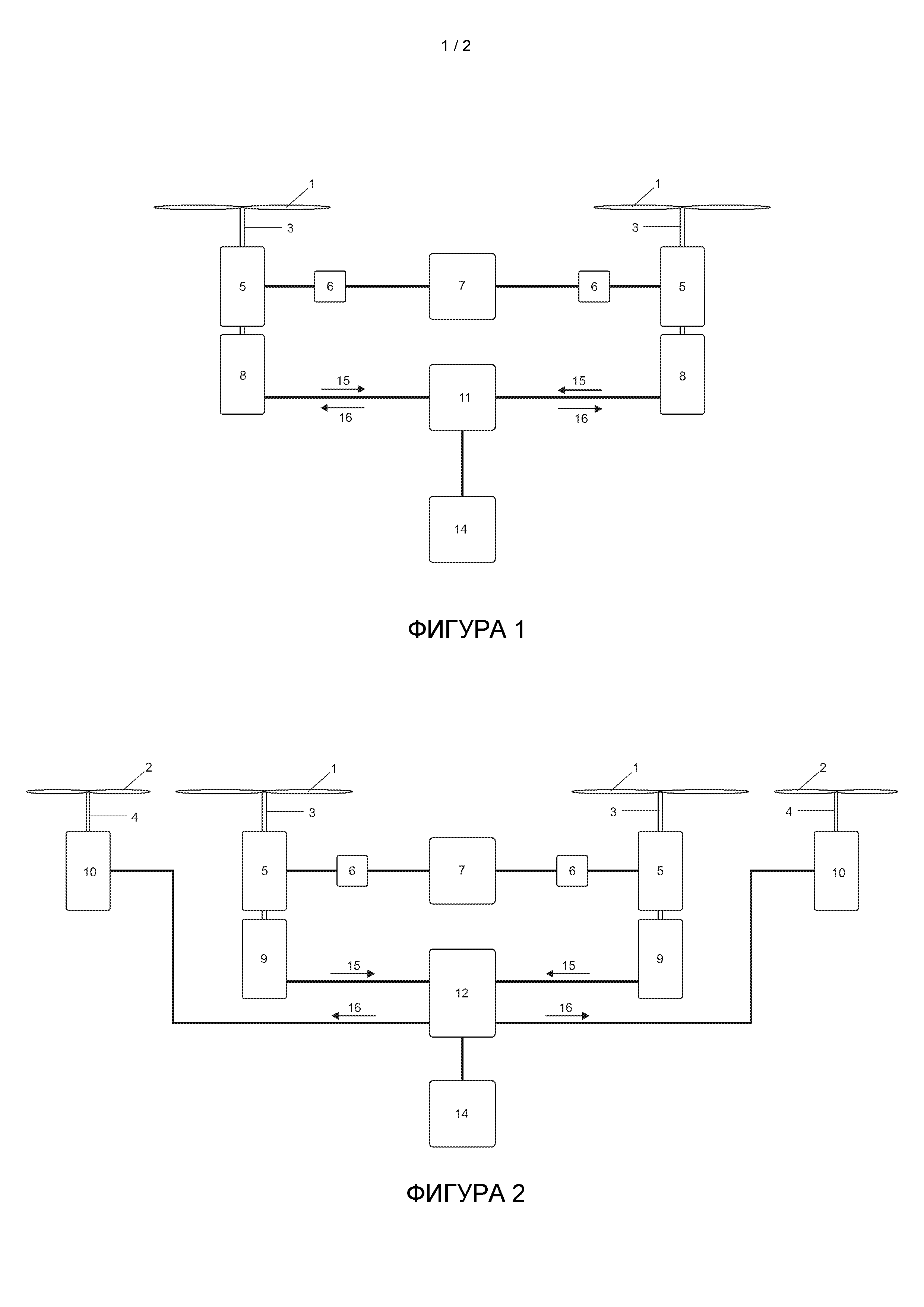
ФИГ. 1: Конструкция дрона с ДВС и электродвигателем с функцией генератора.
ФИГ. 2: Конструкция дрона с ДВС и электродвигателем, независимыми от генератора.
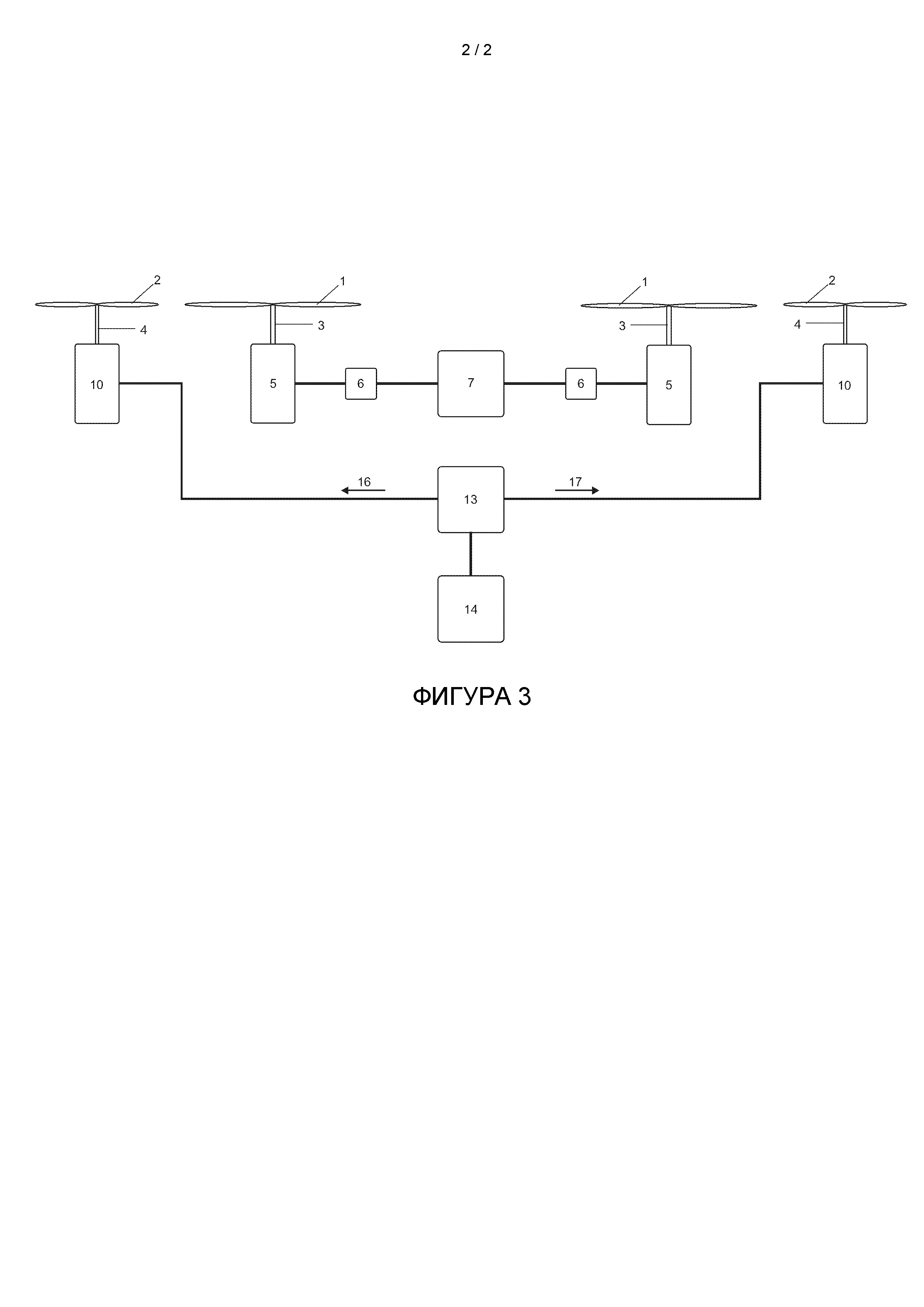
ФИГ. 3: Конструкция дрона с ДВС и электродвигателем.
РАЗЪЯСНЕНИЯ НОМЕРОВ НА ФИГУРАХ
1. Воздушный винт
2. Воздушный винт электродвигателя
3. Вал ДВС и электродвигателя
4. Вал электродвигателя
5. Двигатель внутреннего сгорания
6. Блок управления скоростью ДВС
7. Топливный бак
8. Электродвигатель с функцией генератора
9. Генератор электроэнергии
10. Электродвигатель
11. Блок управления электродвигателя с функцией генератора
12. Блок управления электродвигателя и генератора
13. Блок управления электродвигателя
14. Аккумуляторная батарея
15. Направление зарядного тока
16. Направление тока разрядки
Примечание: Относительный порядок расположения воздушного винта (1), ДВС (5), электродвигателя (8) с функцией генератора на ФИГ. 1, и порядок расположения воздушного винта (1), ДВС (5), электрогенератора (9) на ФИГ. 2 не является обязательным. Этот порядок может быть изменен. Например : воздушный винт (1), электродвигатель (8) с функцией генератора, ДВС (5).
На этих фигурах приведены сгруппированные чертежи для наглядной демонстрации процесса балансировки. Число групп кратно двум, например, 2, …, 16, в зависимости от конструкции дрона.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На ФИГ. 1 показана конструкция дрона с ДВС и электродвигателем с функцией генератора. Воздушный винт (1) принимает движущую силу от вала ДВС, а электродвигатель - от ДВС (5) и электродвигателя (8) с функцией генератора. Скорость вращения ДВС (5) регулируют блоком (6) управления ДВС. Топливный бак обеспечивает ДВС (5) жидким топливом. Зажигание ДВС (5) обеспечивается электродвигателем (8) с функцией генератора. Аккумуляторная батарея заряжается от электродвигателя (8) с функцией генератора, который вращается при работе ДВС (5). При зарядке ток направлен по направлению (15) зарядного тока. Уровень заряда поддерживается блоком (11) управления электродвигателя с функцией генератора.
В этой системе управление балансировкой дрона осуществляется блоком (11) управления электродвигателя с функцией генератора следующими двумя способами:
1. По команде, принятой от системы управления балансировкой дрона, в направлении (15) зарядного тока от электродвигателя (8) с функцией генератора, использующего блок (11) управления электродвигателя с функцией генератора, отводится больше тока, уменьшая скорость вращения соответствующего электродвигателя.
2. По команде, принятой от системы управления балансировкой дрона, больше тока поступает в направлении (16) тока разрядки в электродвигатель (8) с функцией генератора на ту сторону дрона, которую необходимо поднять. С помощью этого способа сохранение балансировки дрона обеспечивается поднятием стороны дрона.
На ФИГ. 2 показана конструкция дрона с ДВС и электродвигателем независимыми от генератора. Воздушный винт (1) подключают к ДВС (5) с помощью вала ДВС и электродвигателя (3). Воздушный винт (1) вращается с помощью ДВС (5). Электрогенератор (9), подключенный к этой же системе, заряжает аккумуляторную батарею (14). Уровень заряда батареи поддерживается блоком (12) электродвигателя и генератора.
В этой системе электродвигатель (10) используется для управления балансировкой дрона. Электродвигатель (10) вращает воздушный винт (1) с помощью вала (4) электродвигателя.
В этой системе управление балансировкой дрона осуществляется блоком (12) управления электродвигателя и генератора следующими двумя способами:
1. По команде, принятой от системы управления балансировкой дрона, в направлении (15) тока зарядки от электродвигателя (10) и генератора (9), использующего блок (12) управления электродвигателя и генератора, отводится больше тока, уменьшая скорость вращения соответствующего электродвигателя.
2. По команде, принятой от системы управления балансировкой дрона, в направлении (16) тока разрядки в электродвигатель и генератор (9), находящиеся на той стороне, которую необходимо поднять, направляется больше тока. С помощью этого способа сохранение балансировки дрона обеспечивается поднятием стороны дрона.
На ФИГ. 3 показана система с ДВС и электродвигателями. Воздушный винт (1) подключен к ДВС (5). Воздушный винт (1) вращается с помощью ДВС (5).
В этой системе электродвигатель (10) используется для управления балансировкой дрона. Электродвигатель (10) вращает воздушный винт(1) с помощью вала (4) электродвигателя.
В этой системе управление балансировкой дрона осуществляется блоком (13) управления электродвигателя.
По команде, принятой от системы управления балансировкой дрона, больше тока подается в направлении (16) тока разрядки в электродвигатель (10), находящийся на той стороне дрона, которую необходимо поднять. С помощью этого способа сохранение балансировки дрона обеспечивается поднятием стороны дрона.
Реферат
Изобретение относится к области авиации, в частности к способам и системам балансировки и стабилизации беспилотных летательных аппаратов. Способ балансировки дрона с двигателями (5) внутреннего сгорания и электродвигателями (8) с функцией генератора включает обеспечение подъемной силы с использованием только двигателей (5) внутреннего сгорания для обеспечения вращения воздушного винта (1) для нахождения дрона в воздухе, использование только регулировки частоты вращения электродвигателей (8) с функцией генератора для сохранения балансировки дрона после подъема в воздух. Достигается увеличение продолжительности полета и более стабильный и простой процесс балансировки. 1 з.п. ф-лы, 3 ил.
Комментарии