Плоский привод со слоистой структурой, плоское приводное устройство и несущая плоскость летательного аппарата - RU2337430C2
Код документа: RU2337430C2
Чертежи




Описание
Настоящее изобретение касается активного приводного механизма, способного обеспечивать поперечное сдвиговое перемещение в плоскости, устройства для использования двух приводов этого типа и его применения для искривления конструкции.
Изобретение касается, в частности, плоского активного привода со слоистой структурой, включающего по меньшей мере один плоский пьезоэлектрический слой, имеющий активное управление, наложенный и объединенный с хотя бы одним пассивным плоским слоем ткани с жесткой основой и утком, образующей сетку ячеек. Активное управление пьезоэлектрического слоя ориентировано особым образом по отношению к сетке ячеек слоев ткани.
Изобретение применимо к активному искривлению таких конструкций как, например, лопасти винта вертолета.
В аэронавтике необходимость улучшить управляемость, безопасность или сокращения звуковых помех заставляет разработчиков летательного аппарата все более и более часто использовать активные элементы изгиба. Эти элементы способны деформироваться контролируемым образом в ответ на определенную команду для того, чтобы изменять поведение летательных аппаратов в их среде.
Таким образом, контролируемый изгиб несущих плоскостей летательных аппаратов явился предметом многочисленных исследований и привел к разработке приводов, позволяющих осуществлять некоторое смещение верхней поверхности крыла (или extrados) по отношению к его нижней поверхности (или intrados).
Помимо механических и гидравлических приводов, таких как представленные De Laurier и др. (США 5288039) или Young и др. (США 6173924), можно перечислить также пьезоэлектрические приводы, которые представляют наибольший интерес, такие, как описанные Jeffs и др. (GB 2348537) или Matthew L. Wilbur и др. («Hover testing of the NASA/ARMY/MIT active twist rotor prototype blade»; the American Helicopter Society 56th Annual Forum, Virginia Beach, Virginia, May 2-4, 2000) или во французском патенте на имя заявителя (FR 2833571).
В английском патенте GB-2348537 задние кромки верхней и нижней поверхностей крыла соединены между собой при помощи трубы, разрезанной параллельно задней кромке, следуя размаху крыла. Оба края разреза приспособлены для размещения пьезоэлектрических приводов, которые выполнены с возможностью перемещения краев по отношению друг к другу, вдоль размаха крыла. Учитывая малую величину доступного удлинения, относительное перемещение задних кромок слишком слабо, чтобы обеспечить эффективное контролируемое искривление несущей поверхности.
В работах Matthew L. Wilbur лопасть винта вертолета оснащена в шести местах, распределенных вдоль его размаха и находящихся в зоне максимальной квазиплоской толщины, двумя пьезоэлектрическими приводами, один на верхней стороне, другой на нижней стороне. Каждый привод включает в себя два пьезоэлектрических слоя типа MFC (Макро Волоконный Композит), способных удлиняться или сокращаться вдоль активного направления. Первый центральный слой стеклоткани располагается между двумя пьезоэлектрическими слоями, образуя трехслойную или сандвич-структуру. Активные направления пьезоэлектрических слоев ориентированы соответственно вдоль основы и утка стеклянной ткани. Эта первая сандвич-структура в свою очередь заключена с формированием другой сандвич-структуры между двумя другими слоями стеклянной ткани, у которых основа и уток ориентированы по диагонали к основе и утку ткани центрального слоя и, следовательно, к активным направлениям. Именно эта пятислойная сандвич-структура и составляет привод.
Когда квазиплоский привод активизирован, он деформируется, спонтанно скручиваясь и индуцируя при этом искривление непосредственно лопасти. Тот факт, что совокупности приводов расположены на верхней стороне и на нижней стороне, усиливает искривление лопасти. Помимо трудности встраивания таких совокупностей в структуру лопасти, они расположены в закрытом отсеке, названном "D-spar", имеющем высокую жесткость при кручении, которая оказывает сильное сопротивление деформациям приводов, создавая таким образом значительные напряжения между составляющими их слоями. Кроме того, так как эти приводы расположены на верхней и на нижней сторонах на уровне максимальной толщины профиля, они испытывают также сильные напряжения из-за того, что лопасть нагружена на пульсирующий изгиб.
Для того чтобы ограничивать это сопротивление, во французском патенте на имя заявителя (FR 2833571) согласно одному из вариантов осуществления изобретения задние кромки верхней и нижней сторон непосредственно соединены с пьезоэлектрическими приводами, работающими на сдвиг и непрерывно закрывающими разрез вдоль размаха лопасти для того, чтобы получить высокую жесткость при кручении. Однако для сохранения этой жесткости необходимо встраивать приводы непосредственно вблизи задней кромки, где толщина плоскости мала, что ограничивает размер привода толщиной профиля. Учитывая небольшую величину угла сдвига, достигаемое таким образом относительное смещение задних кромок слишком слабо, чтобы обеспечить эффективное контролируемое искривление плоскости.
Таким образом, задачей изобретения является разработка устройства, которое непрерывно закрывало бы разрез лопасти, обеспечивало высокую жесткость при кручении, ограничивало внутренние напряжения при воздействии на лопасть внешних нагрузок и допускало значительную величину хода между двумя задними кромками верхней и нижней сторон по всему ее размаху.
Объектом настоящего изобретения является плоский привод, деформируемый на сдвиг, и устройство, использующее два привода согласно изобретению, установленных валетом и способных к сдвиговой деформации каждый в своей плоскости. Изобретение касается также особенностей встраивания подобного устройства в конструкцию лопасти винта вертолета, где оно непрерывно перекрывает изначально открытый разрез.
Первым объектом изобретения является плоский привод со слоистой структурой, имеющий две зоны фиксации, предназначенные для передачи формируемого относительного перемещения сдвига, и по меньшей мере три плоских наложенных друг на друга слоя, включающих в себя по меньшей мере один слой ткани, основа и уток которой состоят из жестких волокон, расположенных согласно двум направлениям, образуя ячейки лежащих рядом параллелограммов, и по меньшей мере один плоский активный пьезоэлектрический слой, выполненный с возможностью удлиняться или сжиматься вдоль активного направления, причем каждая сторона одного слоя приклеена всей своей поверхностью к одной стороне прилегающего слоя, отличающийся тем, что слоистая структура является симметричной, способствуя плоской деформации сдвига; активное направление каждого плоского пьезоэлектрического слоя ориентировано вдоль одной и той же диагонали ячеек каждого слоя тканей, основа и уток которой ориентированы согласно тем же двум направлениям; зоны фиксации привода, имеющие форму, вытянутую вдоль первого направления, расположены вдоль противоположных концов привода согласно второму направлению, благодаря чему каждый плоский слой ткани нагружен вдоль соответствующих диагоналей ячеек, при этом параллелограммы деформируются, вызывая перемещение в плоскости зон фиксации параллельно друг другу, следуя первому направлению.
Целесообразно, чтобы слоистая структура была образована одним активным слоем, расположенным между двумя слоями тканей.
Целесообразно также, чтобы слоистая структура была образована одним слоем ткани, расположенным между двумя активными слоями.
Изобретение касается также плоского приводного устройства, состоящего из двух установленных валетом приводов, две из противоположных зон фиксации которых соединены, а два активных направления не параллельны, при этом две другие зоны фиксации приводов выполнены с возможностью перемещения вдоль первого направления плоскости с амплитудой, равной сумме перемещений обоих единичных приводов.
Изобретение касается также несущей плоскости летательного аппарата, включающей верхнюю и нижнюю поверхности, а также плоское приводное устройство вблизи от задней кромки, при этом плоское приводное устройство имеет две противостоящие зоны фиксации, которые соединены соответственно с нижней поверхностью и верхней поверхностью.
Предпочтительно, чтобы две противостоящие зоны фиксации, соединенные между собой, и задняя кромка были расположены, следуя хорде, с той и с другой стороны от двух противостоящих зон фиксации.
Предпочтительно также, чтобы две противостоящие соединенные между собой зоны фиксации и задняя кромка были расположены, следуя хорде, с той же стороны от двух противолежащих зон фиксации, а две противостоящие соединенные между собой зоны фиксации образовывали заднюю кромку.
В дальнейшем изобретение поясняется описанием вариантов его осуществления со ссылками на фигуры чертежей, на которых идентичные ссылки обозначают сходные элементы и в числе которых:
Фиг.1 изображает схематический вид привода согласно изобретению в состоянии покоя.
Фиг.2 иллюстрирует деформацию сдвига привода фиг.1, когда он активирован.
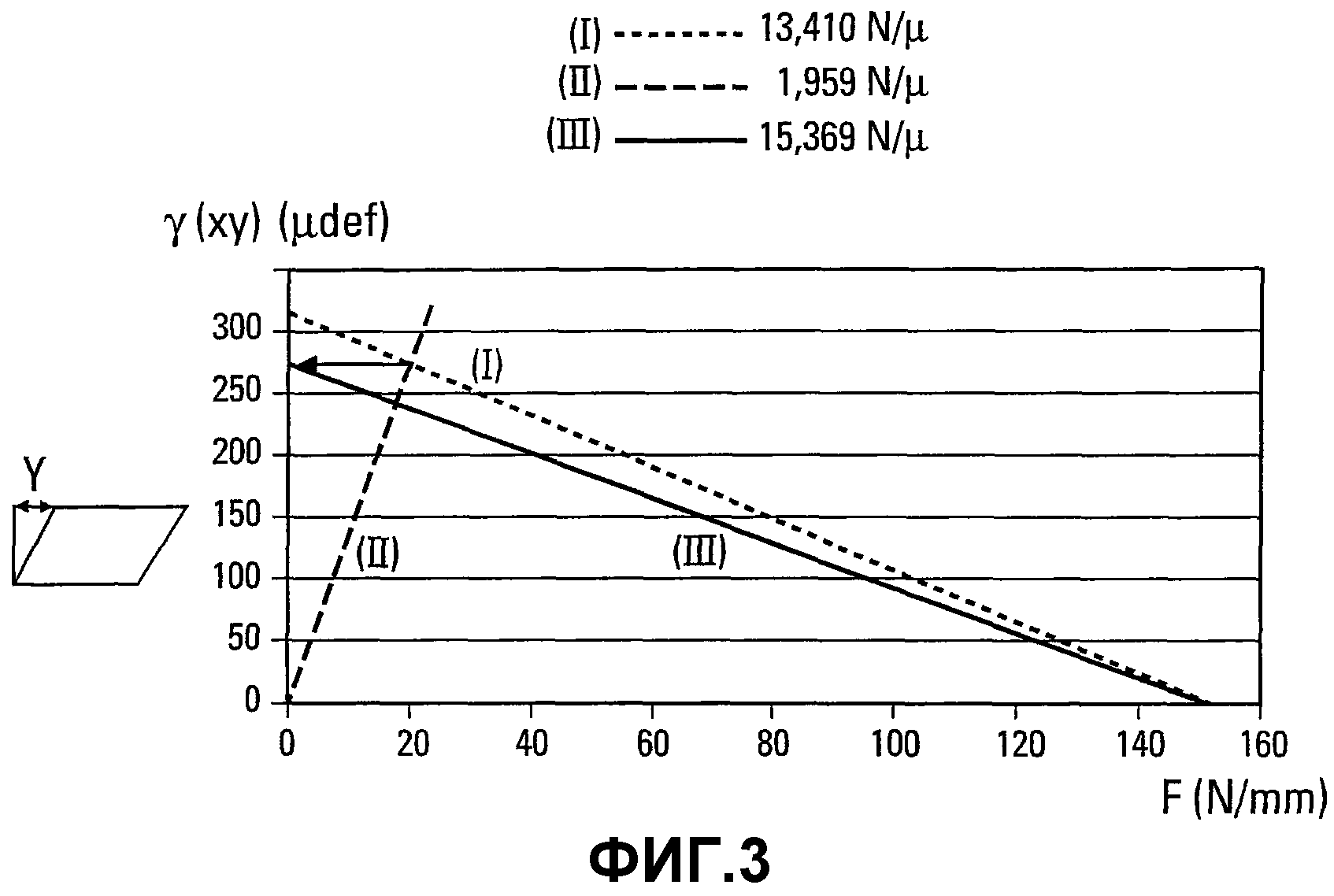
Фиг.3 представляет диаграммы сдвига, характерные для привода согласно изобретению.
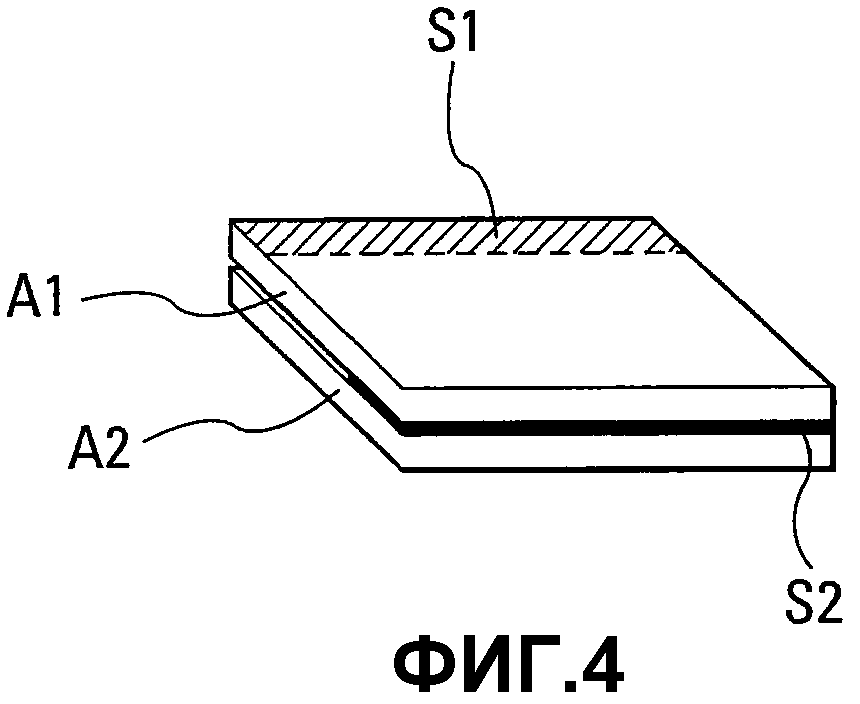
Фиг.4 - схематический вид соответствующего устройства согласно изобретению в состоянии покоя.
Фиг.5 представляет деформацию сдвига устройства фиг.4, когда оно активировано.
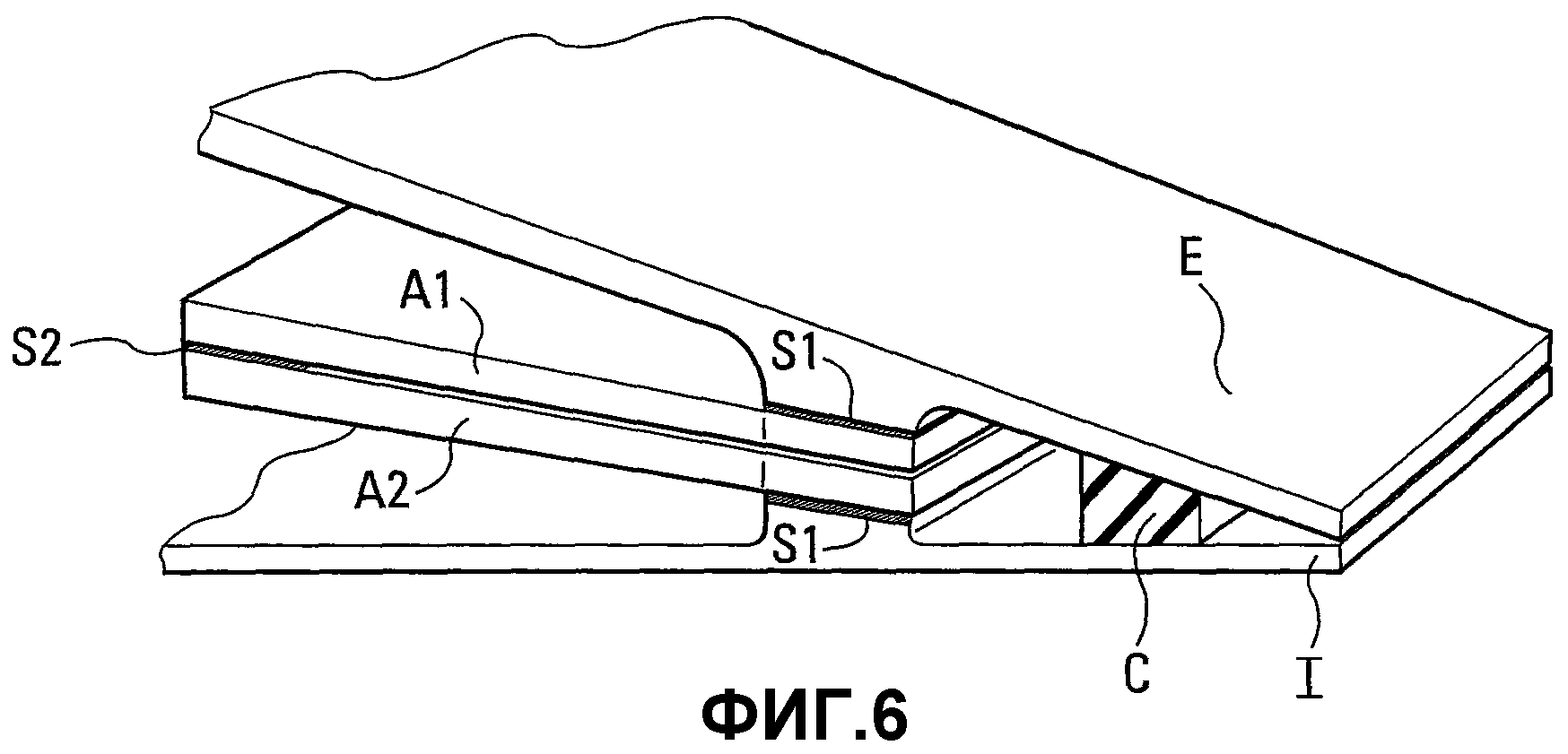
Фиг.6 - вид в изометрии участка лопасти вертолета, в который встроено устройство согласно первому варианту реализации.
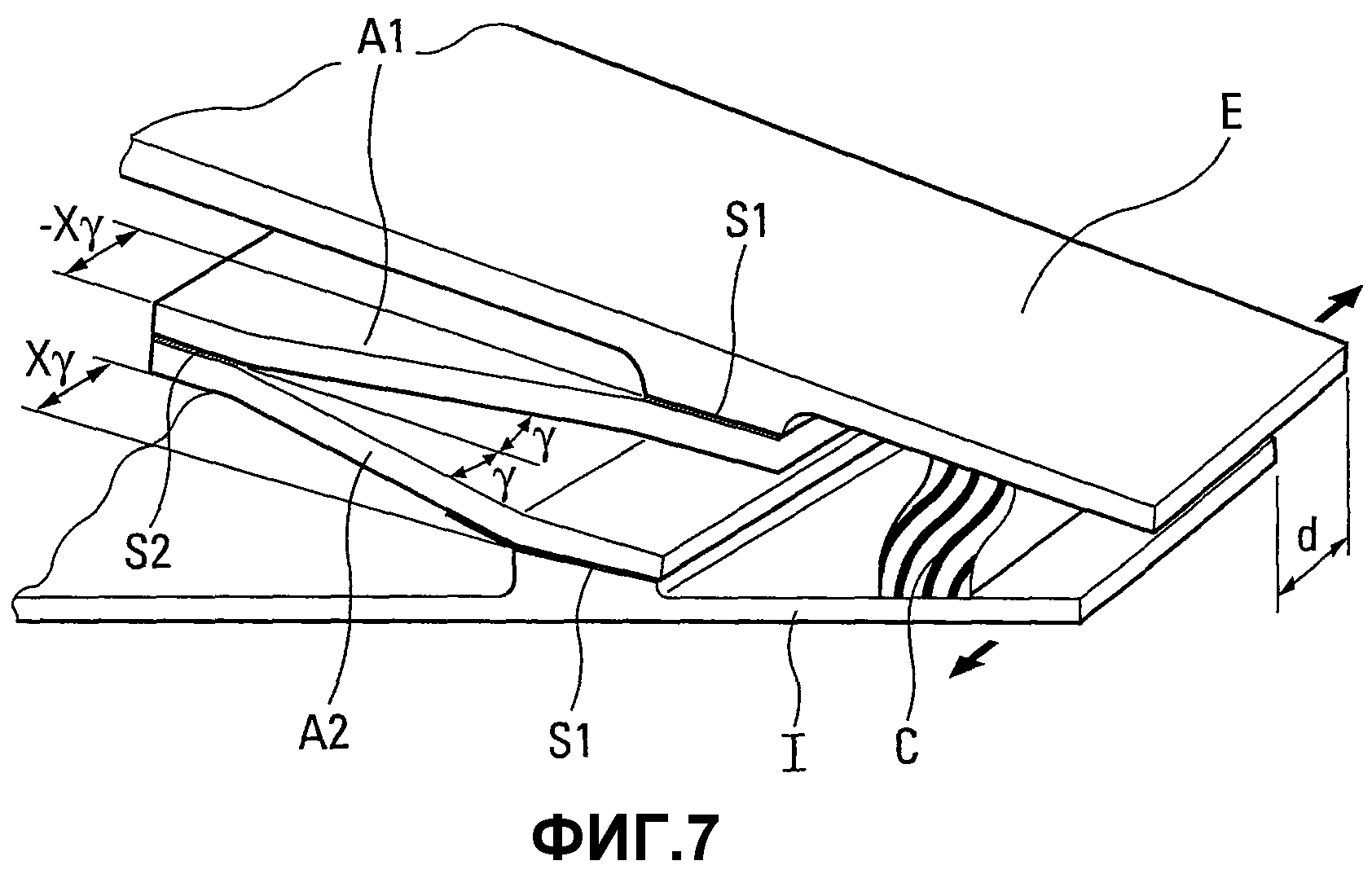
Фиг.7 иллюстрирует функционирование устройства согласно первому варианту реализации.
Фиг.8 показывает характерные диаграммы сдвига устройства, встроенного в лопасть.
Фиг.9 - разрез устройства в лопасти вертолета согласно второму варианту реализации.
Пример 1
Плоский привод со слоистой структурой А, соответствующий настоящему изобретению и показанный на фиг.1, имеет толщину t согласно направлению Z, длину L согласно направлению X и ширину W согласно направлению Y. Этот привод состоит из следующих элементов.
В центральной плоскости находится плоский активный пьезоэлектрический слой 1, способный удлиняться или сжиматься вдоль биссектрисы направлений Х и Y, когда на него подано напряжение. Этот пьезоэлектрический слой состоит из однонаправленных прямоугольных пьезоэлектрических волокон, ориентированных вдоль биссектрисы направлений Х и Y и питаемых напряжением электродами 1а и 1b. Волокна заключены в сандвич-структуру между структурных эпоксидных слоев и полиамидных пленок, включающих в себя пальчиковые электроды, перпендикулярные волокнам. Сборка имеет толщину приблизительно 0,3 мм и прямоугольную активную площадь, например, 85×57 мм2. Недостатком слоя этого типа является то, что он очень тонок и чувствителен, таким образом, к продольному изгибу. Другой недостаток касается его удлинения вдоль направления X, которое может создать проблемы в местах склеивания зон фиксации с их основаниями, в особенности, если последние очень жесткие. Напряжение сдвига может вызвать в этом случае разрыв клеевого соединения. Поверх всей площади вышеупомянутого плоского активного слоя помещена первая ткань 2 толщиной 0,2 мм, например, типа тафты, волокна которой изготовлены из материала с высоким модулем, как, например, у углерода НМ. У этой ткани основа и уток ориентированы соответственно вдоль направления Х и направления Y.
Основа и уток ткани определяют структуру сети расположенных рядом друг с другом параллелограммов.
Снизу по всей площади вышеупомянутого плоского активного слоя помещена вторая ткань 3, идентичная первой ткани 2 и ориентированная таким же образом.
Два клеевых соединения 4 и 5 расположены между этими тремя слоями, чтобы связывать их между собой. Эти клеевые соединения имеют толщину, выверенную до 0,1 мм посредством гибкой текстильной сетки, и модуль Юнга, подобранный таким образом, чтобы передавать как можно лучше перемещение сдвига вышеупомянутого плоского активного пьезоэлектрического слоя 1 вышеназванным тканям 2 и 3.
Зона фиксации S1 сориентирована, следуя уточным нитям тканей, и распространяется вдоль одного конца, следуя нитям основы этих же тканей. Она расположена, например, на одной внешней стороне привода.
Другая зона фиксации S2 сориентирована, следуя нитям основы тканей, и распространяется вдоль другого конца, следуя уточным нитям этих тех же тканей. Она расположена, например, на другой внешней стороне привода.
Принцип действия привода состоит в том, что, когда плоский активный слой 1 питается напряжением через электроды 1а и 1b, он генерирует удлинение вдоль биссектрисы направлений Х и Y в плоскости X-Y, которое благодаря клеевым соединениям передается обеим композитным тканям 2 и 3. Параллелограммы ячеек тканей, нагруженные вдоль одной и той же диагонали, деформируются. Эта деформация преобразуется в угол сдвига γ по отношению к направлению Y, как это показано на фигуре 2, и плоский активный слой 1 производит перемещение сдвига Хγ=γ×W, следуя оси X, как указано на вышеупомянутой фиг.2.
Привод незначительно удлиняется вдоль направления X, так как уточные нити ткани этому противодействуют. Клеевые соединения при этом нагружены незначительно. Также привод имеет незначительное удлинение вдоль направления Y, так как этому противодействует основа ткани. Привод слабо деформируется в направлении Z, так как он симметричен, и результирующая приложенных сил находится в плоскости X-Y.
Такой привод был изготовлен с применением в качестве плоского активного слоя MFC с активным сечением 85×57×0,3 мм3, заключенного в сандвич-структуру между двумя углеродными тканями SXM10, и был тестирован на работоспособность под напряжением ±750 В.
Посредством розетки из трех датчиков, приклеенной в центре плоского активного слоя, были измерены:
- деформации вдоль направления X;
- деформации вдоль направления Y;
- деформации сдвига γ.
Посредством оптического датчика были также измерены перемещения четырех углов привода, которые будучи отнесенными к его ширине W, позволяют вывести деформацию сдвига. Результаты представлены в таблице 1, в которой l μdef=10-6 метра на метр.
Пример 2
В рамках трехслойного привода один из вариантов его осуществления позволяет увеличить перемещение сдвига.
Этот привод состоит из следующих элементов.
В центре помещена ткань толщиной 0,2 мм, например, типа тафты, волокна которой выполнены из материала с высоким модулем, такого как углерод НМ. Этот слой ткани является плоским и имеет основу и уток, ориентированные соответственно вдоль направления Х и направления Y. Основа и уток образуют сеть расположенных рядом параллелограммов.
Поверх всей площади вышеупомянутого слоя ткани помещен первый плоский активный пьезоэлектрический слой, способный удлиняться или сокращаться вдоль биссектрисы направлений Х и Y, когда он находится под напряжением. Этот пьезоэлектрический слой того же типа, что и упомянутый в предыдущем примере. Он генерирует, таким образом, угол сдвига γ по отношению к направлению X.
Снизу по всей площади вышеупомянутого слоя ткани помещен второй плоский активный пьезоэлектрический слой, идентичный первому и ориентированный таким же образом.
Два клеевых соединения расположены между этими тремя слоями, чтобы связывать их между собой. Эти клеевые соединения имеют толщину, выверенную до 0,1 мм посредством гибкой текстильной сетки, и модуль Юнга, подобранный таким образом, чтобы передавать как можно лучше перемещение сдвига вышеупомянутых плоских активных пьезоэлектрических слоев вышеназванной композитной ткани.
Первая зона фиксации расположена на внешней стороне привода. Она ориентирована вдоль уточной нити ткани и распространяется вдоль одного конца, следуя нити основы той же ткани.
Вторая зона фиксации расположена на другой внешней стороне привода. Она ориентирована вдоль уточной нити ткани и распространяется вдоль другого конца, следуя нити основы той же ткани.
В рабочем состоянии оба плоских активных пьезоэлектрических слоя этого привода питаются одновременно одинаковым напряжением. Они обеспечивают удлинение вдоль одной и той же биссектрисы направлений Х и Y в плоскости X-Y, это удлинение передается слою ткани благодаря клеевым соединениям. Параллелограммы ячеек ткани, нагруженные вдоль одной и той же диагонали, деформируются. Эта деформация превращается в сдвиг γ, как в предыдущем примере. Равным образом, клеевые соединения нагружены слабо, и результирующая действующих сил находится в плоскости X-Y.
Такой привод изготовлен с использованием углеродной ткани SXM10, заключенной в сэндвич-структуру между двумя MFC с активным сечением 85×57×0,3 мм3, служащими плоскими активными пьезоэлектрическими слоями, и был протестирован в действии теми же измерительными средствами и в тех же условиях, что и в примере 1.
Результаты представлены в таблице 2, в которой l μdef=10-6 метра на метр.
Фиг.3 иллюстрирует оценку рабочих характеристик такого привода.
Для голых MFC кривая (I) является прямой угла сдвига γ, гребень в гребень измеренная на MFC под напряжением ±500 В в зависимости от усилия сдвига F, установленного, исходя из наклона кривой жесткости, рассчитанной при сдвиге. Если γ=0, усилие сдвига практически блокируется, так как оно таково, что приводит к потере всего холостого хода, который составляет γ max(320 μdef) для F=0.
Для углеродной ткани и двух клеевых соединений кривая (II) является прямой, выражающей жесткость на сдвиг всей сборки.
Кривая (III) характеризует привод, который является сборкой слоя ткани + клея с двумя MFC.
В дополнение к этим двум примерам возможно использование большего количества плоских слоев. Между тем, для того, чтобы соответствовать изобретению, структура различных осуществленных вариантов должна соответствовать одновременно некоторым основным характеристикам.
Во-первых, структура должна быть симметричной по отношению к серединной плоскости для того, чтобы благоприятствовать плоской сдвиговой деформации привода.
Далее, уточные нити и нити основы каждого плоского слоя ткани, которые образуют ячейки в виде параллелограммов, должны быть все ориентированными соответственно вдоль одних и тех же двух направлений их плоскости, параллельной серединной плоскости.
Кроме того, все плоские активные пьезоэлектрические слои должны иметь, каждый в своей плоскости, активные направления, параллельные и ориентированные в одну и ту же сторону, вдоль одной и той же диагонали ячейки в форме параллелограмма.
Наконец, обе зоны фиксации должны находиться на противоположных концах утка или основы слоев ткани и располагаться соответственно вдоль направления утка или основы слоев ткани.
Пример 3
Изобретение относится к устройству, состоящему из сборки валетом двух приводов А1 и А2, идентичных приводу А, описанному в предыдущих примерах. Оба привода А1 и А2 смонтированы так, как указано на фиг.4, один поверх другого, параллельно друг другу и склеены своими соответствующими зонами фиксации S2.
Принцип действия изобретения таков, что, когда первый привод, подобный приводу из примера 1 или 2, активирован, он генерирует в плоскости X-Y и под углом 45° удлинение, которое передается ткани, ячейки которой, нагруженные вдоль первой диагонали, деформируются в параллелограммы. Эта деформация превращается в сдвиг γ, и первый привод производит перемещение сдвига Xγ1=γ×W, следуя оси X, как это показано на фигуре 5.
Соответственно, при активации второго привода он обеспечивает в плоскости X-Y и под углом 135° удлинение, которое передается в ткани, ячейки которой, нагруженные вдоль второй диагонали, деформируются в параллелограммы. Эта деформация превращается в сдвиг -γ, и второй привод производит перемещение сдвига Xγ1=-γ×W, следуя оси X. Это перемещение сдвига противоположно перемещению сдвига первого привода A1.
Величина d общего перемещения сдвига устройства между соответствующими зонами фиксации S1 равна сумме величин перемещения сдвига каждого привода, а именно d=Хγ1-Хγ2, а так как в примере приводы идентичны, то d=2γ×W, как указано на фигуре 5.
Пример 4
Устройство согласно изобретению может использовать сочетание двух не строго идентичных приводов. Например, возможно комбинировать первый привод, соответствующий примеру 1, со вторым приводом, имеющим ту же слоистую структуру, но отличающимся, с одной стороны, тем, что его ширина W вдоль направления Y превосходит ширину первого привода, и, с другой стороны, тем, что обе зоны фиксации расположены на одной и той же стороне этого второго привода.
Полученное устройство имеет в этом случае две смежные зоны фиксации, доступные с единственной стороны, что может представить практический интерес для некоторых применений.
Устройство согласно изобретению может быть выгодно использовать в сочетании с конструкцией лопасти вертолета для того, чтобы подвергать ее искривлению вдоль всего размаха. В этих условиях система не является больше строго плоской в рабочем состоянии, но немного искривлена. Между тем, эта деформация локально незначительна и не изменяет фундаментально функционирования устройства, описанного в предыдущих примерах.
Пример 5
Как показано на фигуре 6, устройство согласно изобретению может быть расположенным внутри профиля открытой несущей плоскости летательного аппарата и вблизи от его задних кромок. Несущая плоскость названа открытой, поскольку верхняя и нижняя поверхности не соединены между собой вблизи задней кромки этой плоскости. Задние кромки верхней поверхности Е и нижней поверхности I снабжены усиливающими элементами напротив зон фиксации S1 приводов A1 и А2 устройства. Задние кромки приклеены или привинчены на уровне усиливающих элементов к зонам фиксации S1 каждого из идентичных приводов А1 и A2. Клеевые или винтовые соединения распределены вдоль размаха параллельно оси Х фиг.5. Зоны S2 приводов А1 и А2 и задняя кромка расположены, следуя хорде, с одной и с другой стороны от зон фиксации S1 приводов А1 и А2 устройства на несущей плоскости. Плоскость симметрии устройства в состоянии покоя располагается рядом с плоскостью хорды профиля и, таким образом, с нулевой осью изгиба. Устройство в этом случае подвергается лишь очень слабым напряжениям, когда лопасть нагружена на изгиб.
Устройство непрерывно перекрывает разрез несущей плоскости вдоль ее размаха. Между тем, может быть осуществлено дополнительное сцепление между задними кромками верхней и нижней поверхностей посредством эластомера С с низким модулем, приклеенного к усиливающим элементам каждой из задних кромок и даже напрямую между зонами фиксации S1 приводов А1 и А2 устройства, так как именно жесткость при сдвиге устройства обуславливает жесткость при кручении несущей плоскости.
Принцип вмонтированного таким образом устройства идентичен принципу согласно примеру 2. Величина d общего сдвигового перемещения устройства между задними кромками равна сумме величин перемещения сдвига каждого привода, как указано на фиг.7.
Фиг.8 иллюстрирует оценку показателей такого устройства.
Кривая (I) характеризует устройство, составленное только из двух простых приводов из ранее определенных серий. Перемещения выражены в мкм. Устройство питается напряжением +1500/-500 В.
Кривая (II) характеризует жесткость при сдвиге одной секции лопасти (хорда 141,5 мм), открытой со стороны задней кромки. Внутренняя структура является структурой классического типа. Усилие сдвига соответствует усилию, которое надо приложить к задним кромкам, чтобы их перемещать одну по отношению к другой.
Кривая (III) характеризует соединение лопасти и устройства в сборке.
Пример 6
Как показано на фиг.9, устройство согласно изобретению может включать в себя и собственно саму заднюю кромку, два привода составляют в этом случае соответственно части верхней и нижней поверхностей, непосредственно соседствующие с задней кромкой. Плоскости симметрии обоих приводов больше не являются параллельными. Приводы А1 и А2 устройства соединены их соответствующими зонами фиксации S1 таким образом, чтобы образовывать между ними угол, оптимальный для задней кромки лопасти. Привод А1 приклеен своей зоной фиксации S2 на верхней стороне задней кромки к верхней поверхности Е аэродинамического профиля, а простой привод А2 приклеен своей зоной фиксации S2 на нижней стороне задней кромки к нижней поверхности I аэродинамического профиля. Зоны S1 и задняя кромка расположены, следуя хорде, с одной и той же стороны от зон фиксации S2 приводов А1 и А2 устройства на несущей плоскости.
Дополнительно может быть осуществлена связь между верхней и нижней задними кромками посредством эластомера С с низким модулем, приклеенного, например, на уровне внутренних поверхностей сдвоенного привода.
Устройство непрерывно перекрывает разрез несущей плоскости вдоль ее размаха и осуществляет "композитное" соединение таким образом, чтобы уменьшить гибкость привода с целью избежать его продольного изгиба.
Реферат
Изобретение относится к пьезоэлектрическим приборам для управления несущими плоскостями летательного аппарата. Плоский привод со слоистой структурой, симметричной по отношению к серединной плоскости, включает плоский пьезоэлектрический слой, имеющий активное направление и соединенный с одним плоским пассивным слоем ткани с жесткими основой и утком, ориентированными согласно двум направлениям, образующим сеть ячеек. Оба направления каждого слоя ткани являются одними и теми же. Активное направление каждого пьезоэлектрического слоя ориентировано вдоль одной единственной диагонали ячеек слоев ткани. Плоское приводное устройство состоит из двух приводов, установленных валетом. Несущая плоскость летательного аппарата, например лопасть вертолета, включает верхнюю и нижнюю поверхности, а также приводное устройство вблизи от задней кромки. Изобретение направлено на повышение управляемости. 3 н. и 4 з.п. ф-лы, 9 ил., 2 табл.

Комментарии