Винт для летательного аппарата, выполненного с возможностью зависания, и соответствующий способ управления - RU2730786C1
Код документа: RU2730786C1
Чертежи














Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к винту для летательного аппарата, выполненного с возможностью зависания.
Настоящее изобретение также относится к способу управления винтом для летательного аппарата, выполненного с возможностью зависания.
УРОВЕНЬ ТЕХНИКИ
Известные летательные аппараты, выполненные с возможностью зависания, например, вертолеты, содержат фюзеляж, несущий винт, расположенный сверху центрального участка фюзеляжа, и хвостовой винт с функцией противодействия крутящему моменту, создаваемому несущим винтом на фюзеляже.
Несущий винт по существу содержит вал, вращающийся вокруг оси, втулку, соединенную с этим валом, и множество лопастей, консольно закрепленных на вышеуказанной втулке.
В частности, каждая лопасть имеет по существу продольную протяженность в радиальном направлении относительно оси вала и при работе приводится во вращение втулкой в плоскости движения, поперечной к оси вала.
В дополнение, каждая лопасть выполнена с возможностью перемещения относительно втулки в нескольких или во всех плоскостях ориентации, что обеспечивает вертолету выполнять различные маневры.
Каждая лопасть содержит, в частности:
основной участок, образующий комель лопасти, который шарнирно соединен с втулкой; и
концевой участок, который ограничивает лопасть на дальнем конце от вала относительно основного участка.
Основной участок каждой лопасти длиннее, чем соответствующий концевой участок.
В вертолетной промышленности концевые участки лопастей могут иметь форму с отрицательным двугранным углом относительно соответствующих основных участков. Другими словами, концевые участки лопастей наклонены вниз относительно соответствующих основных участков по направлению к фюзеляжу вертолета.
За счет отрицательного двугранного угла можно улучшить коэффициент полезного действия винта в режиме зависания вертолета.
Несмотря на возможность улучшения поведения вертолета в режиме зависания, использование концевых участков, имеющих отрицательные двугранные углы, повышает уровень шума вертолета в режиме горизонтального полета.
В связи с этим в вертолетной промышленности существует необходимость обеспечения винтов для летательного аппарата, выполненного с возможностью зависания, которые обеспечивают сохранение аэродинамической эффективности в режиме зависания и при этом снижают уровень шума в режиме горизонтального полета.
В частности, существует необходимость обеспечения винтов вышеописанного типа с минимальным смещением центра масс концевых участков лопастей. Это связано с исключением необходимости противодействия высоким нагрузкам из-за центробежного ускорения, которое может достигать нескольких сотен g на концевых участках.
В дополнение, существует необходимость обеспечения винтов вышеописанного типа, которые характеризуются умеренными приводными силами и/или отсутствием разбалансировки винта в случае неправильного управления одной из лопастей и/или отсутствием изменения аэродинамического профиля лопастей и, следовательно, ухудшения общей аэродинамической эффективности вертолета.
Документ US 2016/0075430 описывает винт для летательного аппарата, выполненного с возможностью зависания, в котором каждая лопасть винта содержит концевой участок, шарнирно соединенный с основным комлевым участком, и который может использоваться для регулировки отрицательного двугранного угла в соответствии с режимом полета летательного аппарата.
Винт, описанный в документе US 2016/0075430, дополнительно содержит гидравлический исполнительный механизм для регулировки отрицательного двугранного угла концевого участка.
Однако использование силовых исполнительных механизмов для регулировки отрицательного двугранного угла концевого участка оставляет возможность усовершенствования.
В частности, размещение исполнительного механизма в небольшой области между основным участком лопасти и концевым участком является довольно сложным.
Кроме того, концевые участки подвергаются очень высоким аэродинамическим и инерционным нагрузкам, в частности, центробежным силам. Соответственно, приводная система требует очень больших приводных сил и крутящих моментов.
В связи с этим в вертолетной промышленности существует необходимость выборочной регулировки угла между концевым участком и основным участком, для которой требуется минимальное использование силовых исполнительных механизмов.
Документ KR-A-20120059091 раскрывает винт согласно ограничительной части пункта 1 формулы изобретения.
Документ ЕР-А-1127786 раскрывает основное крыло, которое прикреплено на своем комлевом концевом участке к втулке несущего винта вращательного приводного блока и обеспечено передним крылом- и задним крылом, которые имеют по существу одинаковый размах. Документ ЕР-А-1127786 раскрывает блок управления для управления углом атаки переднего и заднего крыльев.
Документ US-A-2006/027703 раскрывает лопасть, содержащую основной участок, концевой участок, имеющий аэродинамическую форму и расположенный вблизи края основного участка, и исполнительный механизм, соединенный с концевым участком. Исполнительный механизм выполнен с возможностью вращения концевого участка вокруг продольной оси и регулировки двугранного угла концевого участка.
Документ ЕР-А-2228299 раскрывает винт для летательного аппарата, выполненного с возможностью зависания, согласно ограничительной части пункта 24 формулы изобретения и способ управления винтом для летательного аппарата, выполненного с возможностью зависания, согласно ограничительной части пункта 34 формулы изобретения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в обеспечении винта для летательного аппарата, выполненного с возможностью зависания, который удовлетворяет по меньшей мере одну из вышеуказанных потребностей простым и экономически эффективным образом.
Вышеуказанная задача решается настоящим изобретением, поскольку оно относится к винту для летательного аппарата, выполненного с возможностью зависания, как заявлено в пункте 1 формулы изобретения.
Настоящее изобретение также относится к способу управления винтом для летательного аппарата, выполненного с возможностью зависания, как заявлено в пункте 19 формулы изобретения.
Настоящее изобретение также относится к винту для летательного аппарата, выполненного с возможностью зависания, как заявлено в пункте 24 или 32 формулы изобретения.
Настоящее изобретение также относится к способу управления винтом для летательного аппарата, выполненного с возможностью зависания, как заявлено в пункте 3 5 или 45 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения далее описано четыре предпочтительных варианта выполнения исключительно в качестве неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
Фигура 1 представляет собой вид спереди вертолета, содержащего винт в соответствии с первым вариантом выполнения настоящего изобретения, оснащенный лопастями, находящимися в первом рабочем режиме зависания и во втором рабочем режиме горизонтального полета;
Фигура 2 представляет собой вид сверху вертолета, показанного на Фигуре 1, иллюстрирующий лопасти в первом и втором рабочих режимах;
Фигура 3 представляет собой вид в увеличенном масштабе лопасти винта вертолета, показанного на Фигурах 1 и 2, с некоторыми частями, удаленными для наглядности;
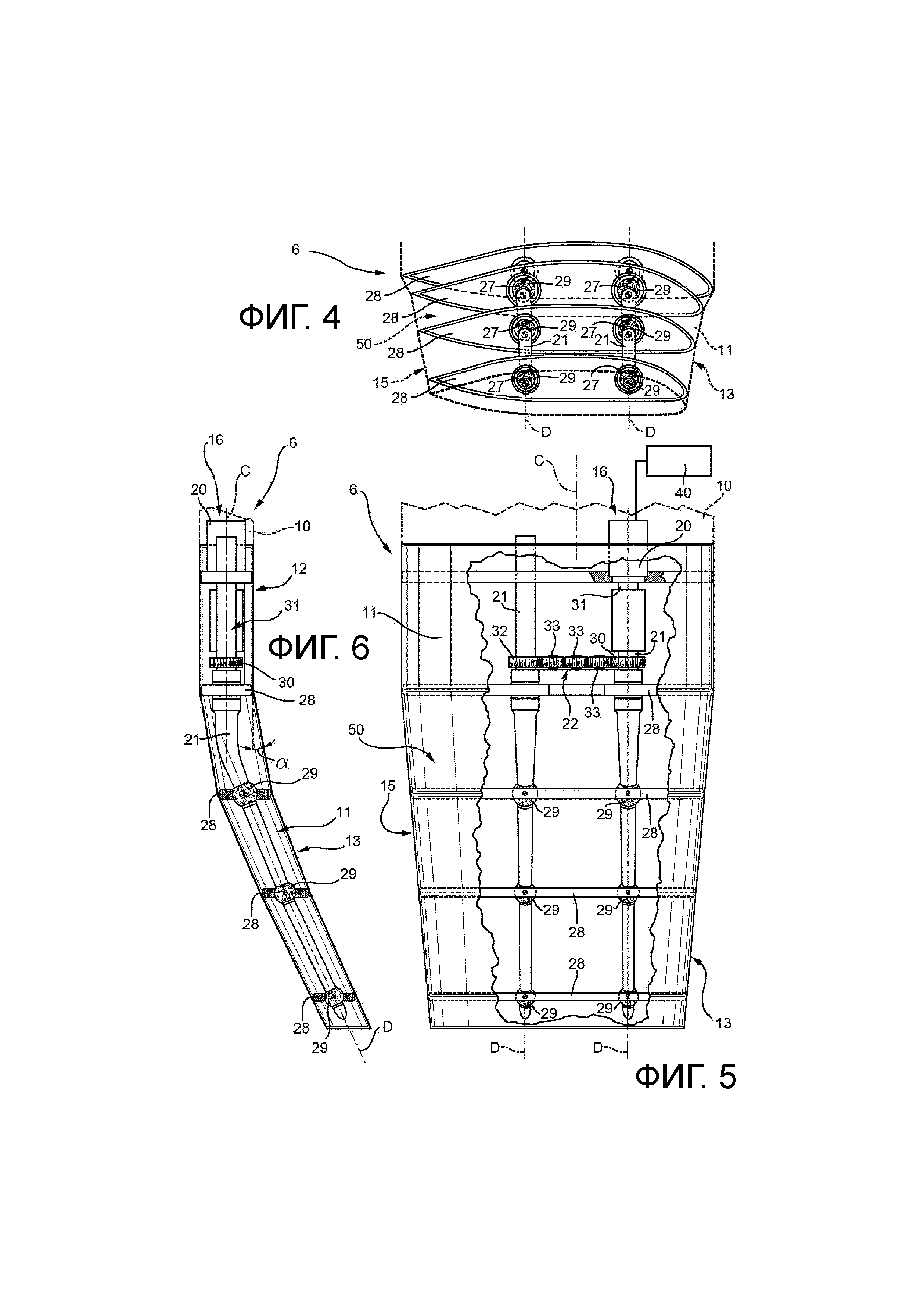
Фигура 4 представляет собой вид лопасти, показанной на Фигуре 3, в первом рабочем режиме, взятый с одной стороны вертолета в еще более увеличенном масштабе с некоторыми частями, удаленными для наглядности;
Фигура 5 представляет собой вид лопасти, показанной на Фигуре 4, в первом рабочем режиме, взятый сверху вертолета;
Фигура 6 представляет собой вид лопасти, показанной на Фигурах 4 и 5, в первом рабочем режиме, взятый спереди вертолета;
Фигура 7 представляет собой вид лопасти, показанной на Фигуре 3, во втором рабочем режиме, взятый с одной стороны вертолета в еще более увеличенном масштабе;
Фигура 8 представляет собой вид лопасти, показанной на Фигуре 7, в первом рабочем режиме, взятый сверху вертолета;
Фигура 9 представляет собой вид лопасти, показанной на Фигурах 7 и 8, в первом рабочем режиме, взятый спереди вертолета;
Фигура 10 представляет собой вид в перспективе лопасти, показанной на Фигурах 4-9, в первом рабочем режиме с некоторыми частями, удаленными для наглядности;
Фигура 11 представляет собой вид в перспективе лопасти, показанной на Фигурах 4-10, во втором рабочем режиме с некоторыми частями, удаленными для наглядности;
Фигура 12 представляет собой вид в поперечном разрезе лопасти, показанной на Фигурах 4-11, взятый вдоль линии XII-XII, показанной на Фигуре 11;
Фигура 13 представляет собой вид в продольном разрезе лопасти, показанной на Фигурах 4-12, взятый вдоль линии XIII-XIII, показанной на Фигуре 11;
Фигуры 14 и 15 представляют собой виды в поперечном разрезе лопасти, показанной на Фигурах 4-14, взятые вдоль линий XIV-XIV и XV-XV, показанных на Фигуре 13 соответственно;
Фигура 16 иллюстрирует вертолет, содержащий винт в соответствии со вторым вариантом выполнения настоящего изобретения;
Фигура 17 иллюстрирует вид в перспективе в увеличенном масштабе лопасти винта, показанного на Фигуре 16, с некоторыми частями, удаленными для наглядности; и
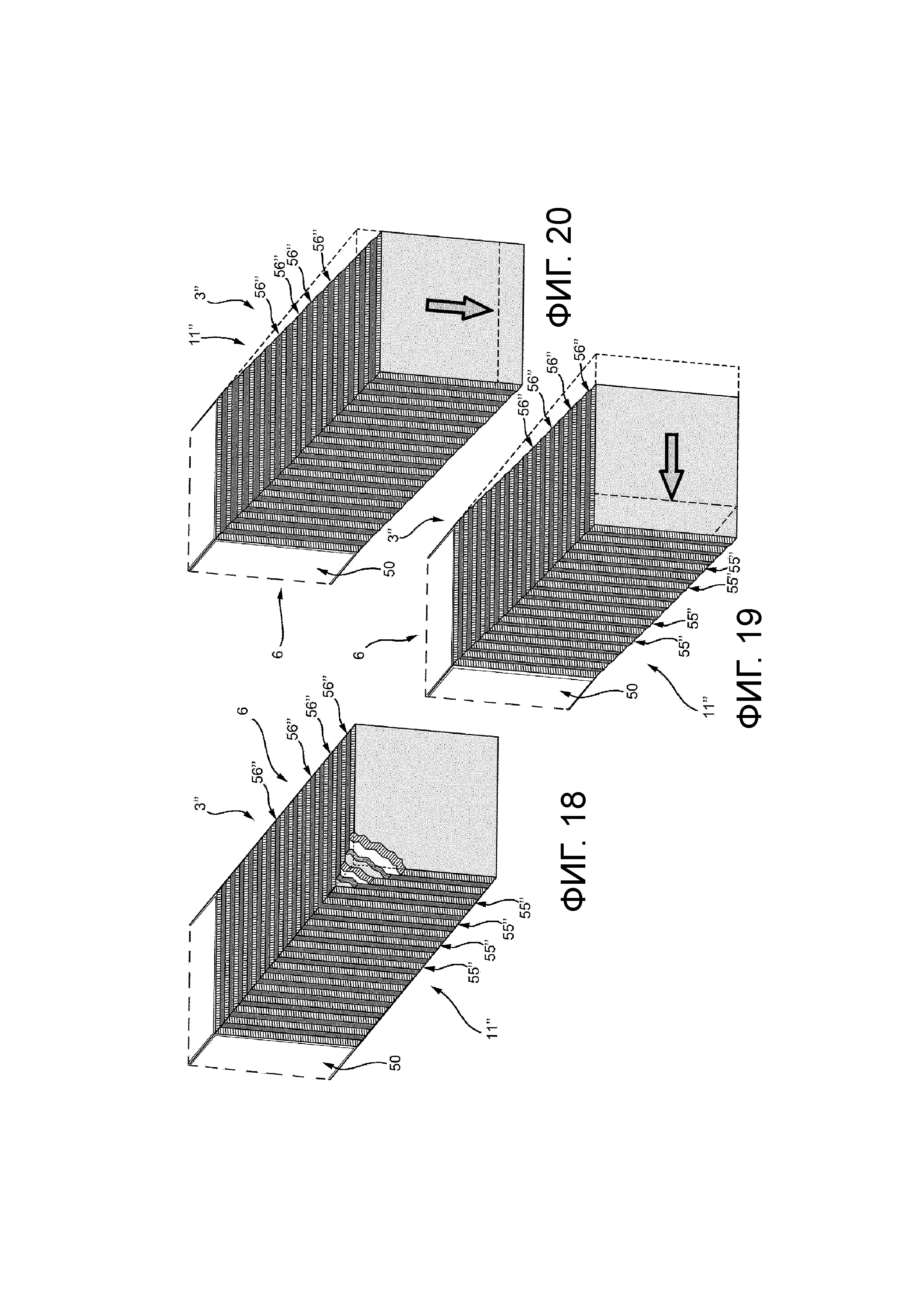
Фигуры 18-20 схематически иллюстрируют форму лопасти винта в соответствии с третьим вариантом выполнения настоящего изобретения с некоторыми частями, удаленными для наглядности;
Фигура 21 иллюстрирует лопасть винта в соответствии с четвертым вариантом выполнения настоящего изобретения в первой конфигурации;
Фигуры 22 и 23а представляют собой виды в частичном разрезе лопасти, показанной на Фигуре 21, в первом положении и во втором положении соответственно в увеличенном масштабе и с некоторыми частями, удаленными для наглядности;
Фигура 23b представляет собой увеличенный вид некоторых компонентов, показанных на Фигуре 23а;
Фигуры 24-26 представляют собой виды в разрезе, взятые вдоль соответствующих линий XXIV-XXIV, XXV-XXV и XXVI-XXVI, показанных на Фигуре 22;
Фигуры 27-29 иллюстрируют изменение во времени подъемной силы, действующей на концевые участки лопасти, показанной на Фигурах 21-23а, при нахождении вертолета в режиме зависания, в режиме горизонтального полета со скоростью ниже порогового значения и со скоростью выше порогового значения соответственно;
Фигура 30 иллюстрирует аэродинамический момент, действующий на концевой участок лопасти, показанной на Фигурах 21-23а, во время перемещения из первого положения во второе положение в режиме, показанном на Фигуре 27;
Фигура 31 иллюстрирует аэродинамический момент, действующий на концевой участок лопасти, показанной на Фигурах 21-23а, во время перемещения из второго положения в первое положение в режиме, показанном на Фигуре 27;
Фигура 32 иллюстрирует перемещение концевого участка между первым и вторым положениями в зависимости от горизонтальной скорости вертолета;
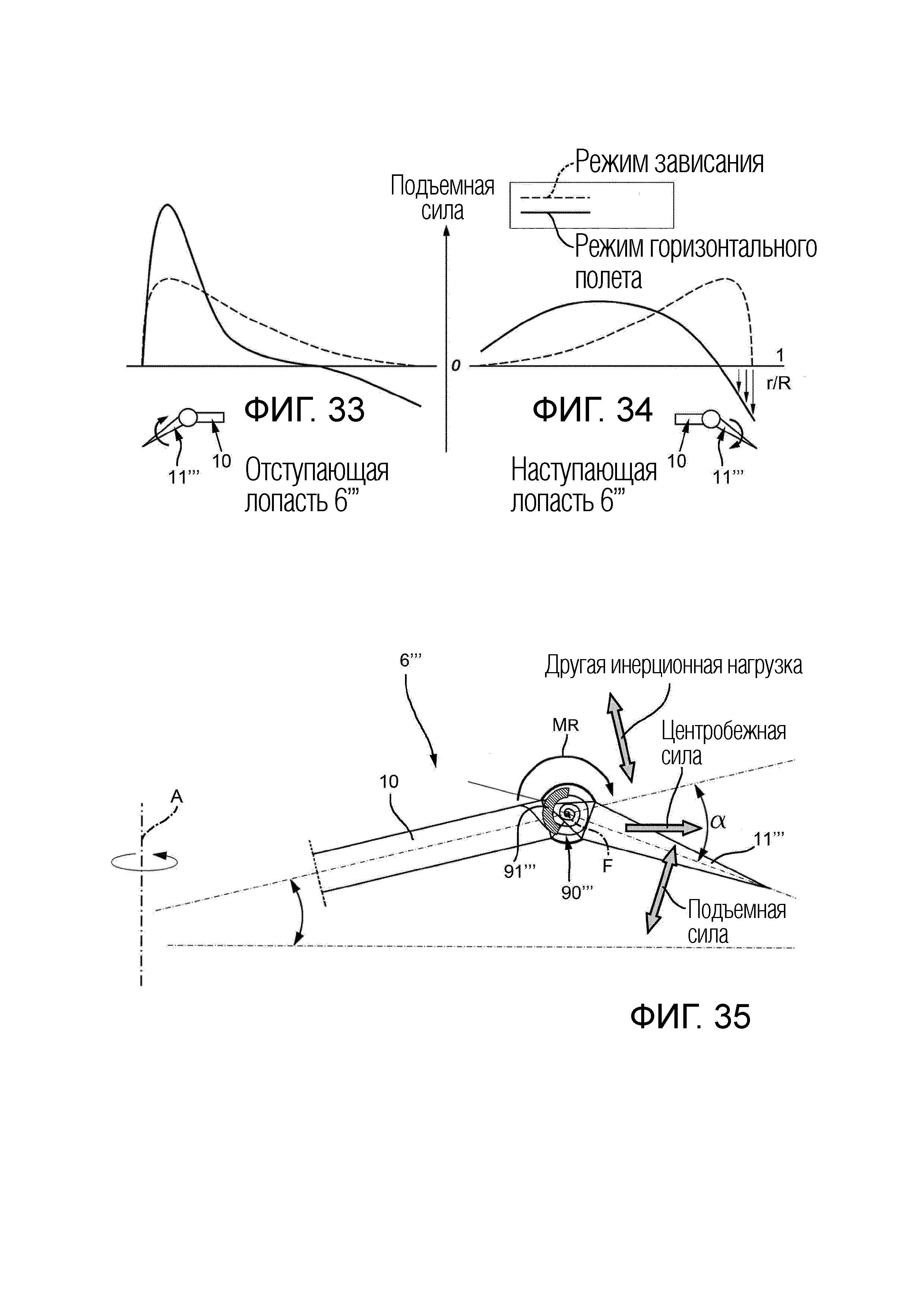
Фигуры 33 и 34 иллюстрируют распределение подъемной силы вдоль размаха лопасти, показанной на Фигурах 21-23а, причем сплошная линия относится к режиму горизонтального полета, а пунктирная линия относится к режиму зависания, для отступающей лопасти и наступающей лопасти соответственно;
Фигура 35 иллюстрирует силы, действующие на концевой участок лопасти, показанной на Фигурах 21-23а, вместе с дополнительными компонентами этой лопасти;
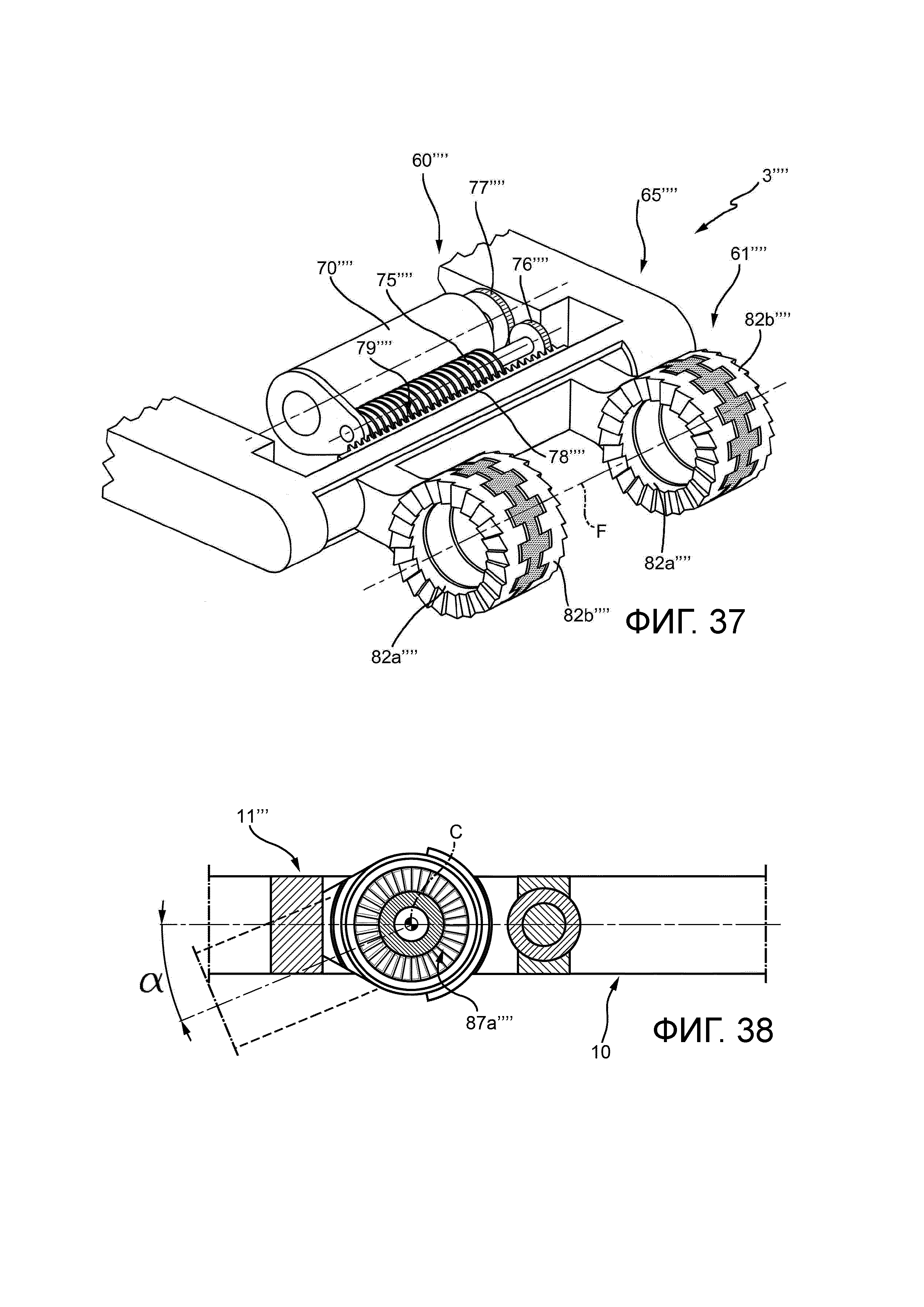
Фигура 36 представляет собой вид в частичном разрезе лопасти винта в соответствии с пятым вариантом выполнения настоящего изобретения в первом положении;
Фигура 37 представляет собой вид в перспективе концевого участка лопасти, показанной на Фигуре 36, с некоторыми частями, удаленными для наглядности, и в увеличенном масштабе; и
Фигура 38 представляет собой вид в разрезе, взятый вдоль линии XXXVIII-XXXVIII, показанной на Фигуре 36.
НАИЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Обратимся к Фигурам 1 и 2, ссылочная позиция 1 обозначает вертолет. Вертолет 1 по существу содержит фюзеляж 2, несущий винт 3, вращающийся вокруг оси, и хвостовой винт 4, расположенный на одном конце фюзеляжа 2 и вращающийся вокруг своей собственной оси, поперечной к оси А. В частности, хвостовой винт 4 консольно выступает от киля, расположенного на хвостовом конце фюзеляжа 2, и выполнен с возможностью противодействия крутящему моменту, передаваемому винтом 3 на фюзеляж 2.
Более подробно, винт 3 по существу содержит:
вал 5, вращающийся вокруг оси А, поперечной к оси вращения хвостового винта;
множество лопастей 6, пять в проиллюстрированном примере, продолжающихся вдоль соответствующих направлений, по существу радиальных относительно оси А; и
втулку 7, функционально соединенную с валом 5, от которой консольно продолжаются лопасти 6.
Более подробно, втулка 7 приводит лопасти 6 во вращение вокруг оси А и обеспечивает поворачивание лопасти 6 под действием внешнего привода вокруг соответствующих направлений протяженности для изменения соответствующих углов атаки относительно воздушного потока.
Лопасти 6 шарнирно соединены с втулкой 7, так что они могут перемещаться вокруг различных осей в соответствии с конфигурацией винта 3.
В следующем далее описании рассмотрена только одна лопасть 6, поскольку все лопасти 6 идентичны.
Лопасть 6 содержит:
основной участок 10, образующий комель лопасти 6, шарнирно соединенный с втулкой 7 и продолжающийся вдоль оси С (Фигуры 3-8), поперечной к оси А; и
концевой участок 11, расположенный на дальнем конце основного участка 10 относительно оси А.
Основной участок 10 длиннее концевого участка 11 в направлении радиальной протяженности лопасти 6.
Концевой участок 11 выполнен с возможностью перемещения относительно основного участка 10.
Предпочтительно концевой участок 11 выполнен с возможностью выборочного перемещения относительно основного участка 10 между:
первым положением (лопасти, показанные сплошной линией на Фигуре 1 и ссылочной позицией 6b на Фигуре 2), в котором он образует положительный или отрицательный двугранный угол а относительно основного участка 10; и
вторым положением (лопасти, показанные пунктирной линией на Фигуре 1 и ссылочной позицией 6а на Фигуре 2), в котором он образует положительный или отрицательный угол β стреловидности относительно основного участка 10.
Основной участок 10 и концевой участок 11 имеют соответствующие передние кромки 12 и 13 и задние кромки 14 и 15.
Выражение «положительный/отрицательный двугранный угол α» означает угол, образованный между передней кромкой 13 концевого участка 11 и передней кромкой 12 основного участка 10 в плоскости, параллельной оси А и оси С, в общей точке передних кромок 12 и 13.
Отрицательный двугранный угол α означает, что передняя кромка 13 концевого участка 11 наклонена по направлению к фюзеляжу 2 относительно передней кромки 12 основного участка 10.
Тогда как положительный двугранный угол α означает, что передняя кромка 13 концевого участка 11 наклонена от фюзеляжа 2 относительно передней кромки 12 основного участка 10.
Выражение «угол β стреловидности» означает угол, образованный между передней кромкой 13 концевого участка 11 и передней кромкой 12 основного участка 10 в плоскости, поперечной к оси А, в общей точке передних кромок 12 и 13.
Положительный угол β стреловидности означает, что передняя кромка 13 концевого участка 11 расположена после передней кромки 12 основного участка 10 относительно направления движения лопасти 6 вокруг оси А.
Тогда как отрицательный угол β стреловидности означает, что передняя кромка 13 концевого участка 11 расположена перед передней кромкой 12 основного участка 10 относительно направления движения лопасти 6 вокруг оси А.
В частности, угол β стреловидности концевого участка 11 относительно основного участка 10 минимизируется, когда концевой участок 11 находится в первом положении.
Двугранный угол α концевого участка 11 относительно основного участка 10 равен нулю, когда концевой участок 11 находится во втором положении.
Лопасть 6 также содержит исполнительный блок 16 для осуществления перемещения концевого участка 11 между первым и вторым положениями.
Более подробно, исполнительный блок 16 содержит (Фигуры 3-9):
двигатель 20;
множество стержней 21, функционально соединенных с последовательными участками концевого участка 11 и предназначенных для осуществления перемещения концевого участка 11 между первым и вторым положениями; и
передаточный блок 22, функционально расположенный между двигателем 20 и стержнями 21.
В проиллюстрированном примере двигатель 20 представляет собой шаговый двигатель.
Кроме того, двигатель 20 размещен внутри основного участка 10.
Стержни 21 вращаются вокруг соответствующих осей, параллельных друг другу и оси С, и, в свою очередь, содержат:
участки 25, размещенные в основном участке 10 и продолжающиеся параллельно соответствующей оси С; и
участки 26, размещенные в концевом участке 11 и продолжающиеся вдоль соответствующей оси D относительно оси С.
В частности, участки 26 расположены под углом относительно участков 25.
В проиллюстрированном примере участки 25 и соответствующие оси С являются прямыми, тогда как участки 26 и соответствующие оси D изогнуты.
В проиллюстрированном примере участки 26 имеют такую форму, что:
оси D продолжаются относительно оси С по направлению к фюзеляжу 2, когда лопасть 6 находится в первом положении (Фигуры 4-6);
оси продолжаются относительно оси С в направлении, противоположном направлению движения лопасти 6, когда последняя находится во втором положении (Фигуры 7-9).
Участки 26 расположены с возможностью вращения внутри соответствующих отверстий 27, образованных в ребрах 28 концевого участка 11.
Таким образом, стержни 21 выполнены с возможностью вращения относительно ребер 28.
Предпочтительно стержни 21 соединены с соответствующими ребрами 28 посредством соответствующих шарнирных соединений 29 (Фигуры 4-9).
Кроме того, стержни 21 удерживаются в осевом направлении ребрами 28 параллельно оси С (подробно не показано на сопровождающих чертежах).
Благодаря режиму удержания между стержнями 21 и ребрами 28, последние перемещаются в плоскости, перпендикулярной оси С, и их участок в этой плоскости не меняется во время перемещения концевого участка 11 между соответствующими первым и вторым положениями, таким образом, не меняются участки, поперечные к оси D концевого участка 11. Тогда как участки концевого участка 11, расположенные между ребрами 28, подвергаются упругой сдвиговой деформации в плоскости, перпендикулярной концевому участку 11.
Ребра 28 разнесены друг от друга вдоль направления протяженности концевого участка 11.
В частности, площадь сечения стержней 21 поперечно соответствующей оси D уменьшается при движении вдоль концевого участка 11 от оси А.
Стержни 21 также выполняют функцию восприятия изгибающих моментов и сдвиговых нагрузок на соответствующие лопасти 6. Другими словами, стержни 21 выполняют конструктивную функцию, как правило, выполняемую лонжеронами, используемыми в лопастях.
В примере, показанном на Фигуре 13, стержни 21 имеют круглое сечение в плоскости, перпендикулярной осям С и D. Диаметр стержней 21 уменьшается при движении вдоль концевого участка 11 по осям D.
В проиллюстрированном примере обеспечено пять стержней 21 (только некоторые показаны на Фигурах 3-9).
Передаточный блок 22 содержит, в частности, (Фигуры 3-9):
зубчатое колесо 30, соединенное с выходным валом 31 двигателя 20;
множество зубчатых колес 32, соединенных с соответствующими стержнями 21; и
множество зубчатых колес 33, расположенных между зубчатым колесом 30 и зубчатыми колесами 32.
Вертолет 1 также содержит блок 40 управления (схематически показан на Фигуре 3), выполненный с возможностью:
размещения лопастей 6 в соответствующих первых положениях, когда вертолет 1 находится в режиме зависания; и
размещения лопастей 6 в соответствующих вторых положениях, когда вертолет 1 находится в режиме горизонтального полета.
Концевой участок 11 содержит обшивку 50, образующую аэродинамическую поверхность.
Далее будет подробно описано функционирование винта 3.
В частности, функционирование винта 3 описано со ссылкой на одну лопасть 6, поскольку функционирование всех лопастей 6 идентично.
В случае необходимости поддержания вертолета 1 в режиме зависания блок 40 управления управляет двигателем 20 для размещения концевого участка 11 в первом положении (Фигуры 4-6), в котором угол α представляет собой отрицательный двугранный угол, а угол β стреловидности минимизируется.
В случае необходимости горизонтального полета вертолета 1 блок 40 управления управляет двигателем 20 для размещения концевого участка 11 во втором положении (Фигуры 7-9), в котором двугранный угол α равен нулю, а угол β стреловидности является положительным.
Далее будет описано функционирование винта 3 во время перемещения лопасти 6 из первого положения во второе положение.
Двигатель 20 через передаточный блок 22 осуществляет поворот стержней 21 вокруг оси С на угол девяносто градусов в проиллюстрированном примере.
Это вызывает поворот участков 26 стержней 21 вокруг оси С на девяносто градусов по дуговой траектории.
Поскольку участки 26 стержней 21 расположены под углом относительно соответствующих участков 25 и могут вращаться внутри отверстий 27 ребер 28, концевой участок 11 деформируется.
В частности, ребра 28 концевого участка 11 жестко перемещаются, сохраняя свою форму в плоскости, перпендикулярной осям D, поскольку они находятся в контакте со стержнями 21, тогда как участки концевого участка 11, расположенные между ребрами 28, подвергаются упругой сдвиговой деформации.
Обратимся к Фигурам 16 и 17, ссылочная позиция 3` в целом обозначает винт в соответствии со вторым вариантом выполнения настоящего изобретения.
Винт 3` отличается от винта 3 тем, что он содержит пару колес 51` свободного хода, расположенных вдоль одного из приводных стержней 21` и выполненных с возможностью предотвращения вращения стержней 21` вокруг оси С в направлениях по часовой стрелке и против часовой стрелки соответственно. В частности, можно выборочно привести в действие одно из колес 51` свободного хода и отключить другое колесо 51` свободного хода.
Функционирование винта 3` отличается от винта 3 тем, что он использует по меньшей мере при горизонтальном полете со скоростью выше порогового значения аэродинамическую силу, действующую на концевые участки 11, для перемещения между первым и вторым рабочими положениями.
Фактически, при скоростях выше порогового значения подъемная сила, действующая на концевые участки 11, изменяется по знаку в зависимости от того, являются ли соответствующие лопасти 6 наступающими или отступающими.
Обратимся к Фигуре 16, подъемная сила направлена вниз, когда лопасти 6 являются наступающими, т.е. они имеют соответствующие тангенциальные скорости, совпадающие с направлением полета вертолета 1, и направлена вверх, когда лопасти 6 являются отступающими, т.е. они имеют соответствующие тангенциальные скорости, не совпадающие с направлением полета вертолета 1.
Винт 3` совместно с двигателем 20 использует направленные вниз (вверх) подъемные силы для размещения концевых участков 11 в первом положении с отрицательным (положительным) двугранным углом а перед переходом вертолета 1 в режим зависания.
В частности, при необходимости размещения концевого участка с положительным (отрицательным) двугранным углом а приводится в действие колесо 51` свободного хода, которое обеспечивает возможность вращения стержней 21` в направлении по часовой стрелке (против часовой стрелки), а другое колесо 51` свободного хода отключается (и наоборот).
Обшивка 50 также содержит (Фигура 17) волокна, расположенные вдоль соответствующих осей D, так что она становится жесткой в осевом направлении и гибкой при сдвиге.
Обратимся к Фигурам 18-20, ссылочная позиция 3`` в целом обозначает винт в соответствии с третьим вариантом выполнения настоящего изобретения.
Винт 3`` отличается от винта 3 тем, что концевой участок 11`` каждой лопасти 6 (показан схематически) образован из множества элементов 55`` из жесткого материала и элементов 56`` из вязкоупругого материала, лежащих в соответствующих плоскостях, перпендикулярных оси С, и чередующихся друг с другом вдоль оси С.
Таким образом, концевые участки 11 имеют высокую жесткость на изгиб в плоскостях, перпендикулярных оси С, чтобы сохранять форму ребер 28 и, следовательно, аэродинамическую эффективность обшивки 50, и выполнены с возможностью сдвиговой деформации в плоскостях, перпендикулярных оси С, под действием стержней 21.
Функционирование винта 3`` аналогично винту 3, и поэтому подробно не описано.
Обратимся к Фигурам 21-35, ссылочная позиция 3``` в целом обозначает винт в соответствии с четвертым вариантом выполнения настоящего изобретения.
Винт 3``` отличается от винта 3 тем, что он не содержит приводной блок 16, и тем, что регулировка положения концевых участков 11``` относительно основного участка 10 достигается посредством результирующих моментов Mr, создаваемых силами инерции и аэродинамическими силами и/или силами упругости и/или демпфирующими силами на соответствующих концевых участках 11```.
Кроме того, в отличие от лопасти 6 винта 3, 3`, 3``, угол стреловидности концевого участка 11``` остается постоянным при перемещении лопасти 6``` между первым и вторым положениями.
В частности, концевой участок 11``` каждой лопасти 6``` выполнен с возможностью перемещения относительно соответствующего основного участка 10 между:
соответствующим первым угловым положением, в котором он образует отрицательный двугранный угол α относительно соответствующего основного участка 10; и
соответствующим вторым угловым положением, в котором он образует нулевой угол или минимальный отрицательный двугранный угол α относительно соответствующего основного участка 10.
В проиллюстрированном варианте выполнения при нахождении в первом угловом положении концевой участок 11``` расположен ниже, чем во втором угловом положении.
Лопасть 6``` содержит соединительное средство 60``` для соединения концевого участка 11``` с основным участком 10 с возможностью перемещения между первым и вторым положениями.
Более подробно, соединительное средство 60``` содержит шарнир 61```, продолжающийся вокруг оси F, касательной к оси А, посредством которого концевой участок 11``` шарнирно соединен с основным участком 10.
Конкретнее, шарнир 61``` содержит (Фигура 22):
трубчатый элемент 105``` соосный с осью F;
несколько выступов 106```, 107```, выступающих из основного участка 10, разнесенных в осевом направлении вдоль оси F и соединенных под углом и в осевом направлении с трубчатым элементом 105```; и
множество соединительных элементов 109```, три в проиллюстрированном варианте выполнения, шарнирно прикрепленных к трубчатому элементу 105``` вокруг оси F и выступающих из концевого участка 11```.
Выступ 106``` содержит конический конец 108```, соосный с осью С и установленный внутри корпуса 110```, к которому шарнирно прикреплен дополнительный соединительный элемент 109a``` вокруг оси F. Дополнительный соединительный элемент 109а``` также выступает из концевого участка 11```.
Предпочтительно соединительное средство 60``` может быть выборочно установлено в первой конфигурации (Фигура 22), в которой оно:
обеспечивает вращение концевого участка 11``` относительно основного участка 10 в первом угловом направлении до первого углового положения; и
предотвращает вращение концевого участка 11``` относительно основного участка 10 во втором угловом направлении, противоположном первому угловому направлению.
Кроме того, соединительное средство 60``` может быть выборочно установлено во второй конфигурации (Фигура 23а), в которой оно:
обеспечивает вращение концевого участка 11``` относительно основного участка 10 во втором угловом направлении до второго углового положения; и
предотвращает вращение концевого участка 11``` относительно основного участка 10 в первом угловом направлении.
В проиллюстрированном варианте выполнения первое угловое направление соответствует перемещению концевых участков 11``` вниз вокруг соответствующих осей С, т.е. увеличению отрицательного двугранного угла α или уменьшению положительного двугранного угла.
Второе угловое направление соответствует перемещению концевых участков 11``` вверх, т.е. уменьшению отрицательного двугранного угла α или увеличению положительного двугранного угла.
Предпочтительно каждый концевой участок 11``` установлен в соответствующем первом угловом положении, когда вертолет 1 находится в режиме зависания, и установлен в соответствующем втором угловом положении, когда вертолет 1 находится в режиме горизонтального полета.
Кроме того, каждый концевой участок 11``` выполнен с возможностью перемещения из первого углового положения во второе угловое положение, когда вертолет 1 находится в режиме зависания или в режиме горизонтального полета со скоростью ниже порогового значения, и вертолет 1 должен быть приведен в конфигурацию, оптимизированную для горизонтального полета. Соответственно, соединительное средство 60``` установлено в первой конфигурации, когда вертолет 1 находится в режиме зависания или в режиме горизонтального полета со скоростью ниже порогового значения, и перемещается во вторую конфигурацию, когда вертолет 1 должен быть приведен в конфигурацию, оптимизированную для горизонтального полета.
Каждый концевой участок 11``` также выполнен с возможностью перемещения из второго углового положения в первое угловое положение, когда вертолет 1 находится в режиме горизонтального полета, и вертолет 1 должен быть приведен в конфигурацию, оптимизированную для зависания. Соответственно, соединительное средство 60``` установлено во второй конфигурации, когда вертолет 1 находится в режиме горизонтального полета со скоростью выше порогового значения, и перемещается в первую конфигурацию, когда вертолет 1 должен быть приведен в конфигурацию, оптимизированную для зависания.
Далее в настоящем описании рассмотрена только одна лопасть 6```, поскольку все лопасти 6``` идентичны.
Предпочтительно лопасть 6``` содержит (Фигуры 22, 23а и 35) пружину 90``` кручения, которая расположена между соответствующими основным участком 10 и концевым участком 11``` и создает упругий крутящий момент Mk вокруг соответствующей оси F на концевом участке 11```.
В проиллюстрированном варианте выполнения пружина 90``` упруго нагружает концевой участок 11``` в направлении первого углового положения.
Предпочтительно лопасть 6``` содержит (Фигуры 22, 23а и 35) демпфер 92``` кручения, который расположен между основным участком 10 и концевым участком 11``` и создает демпфирующий крутящий момент Md в зависимости от степени поворота вокруг оси F на концевом участке 11```.
В проиллюстрированном варианте выполнения пружина 90``` и/или демпфер 92``` размещены внутри корпуса 110```.
Предпочтительно лопасть 6``` содержит множество балластов 91```, расположенных на концевом участке 11``` и предназначенных для размещения центра масс концевого участка 11``` максимально близко к оси F, чтобы минимизировать момент Мс из-за центробежной силы и других инерционных воздействий на концевой участок 11``` (Фигура 35).
Балласты 91``` прикреплены к основному участку 10. В частности, балласты 91``` противоположны в радиальном направлении оси F относительно соответствующих соединительных элементов 109а``` 109b```. В проиллюстрированном варианте выполнения балласты 91``` выполнены из вольфрама.
Со ссылкой на Фигуры 27-29 проиллюстрировано изменение во времени подъемной силы, действующей на концевой участок 11```, для трех различных режимов полета вертолета 1.
Далее в настоящем описании выражение «положительная подъемная сила» будет означать подъемную силу, направленную вверх, тогда как выражение «отрицательная подъемная сила» будет означать подъемную силу, направленную вниз.
В частности, Фигура 27 иллюстрирует изменение во времени подъемной силы на концевом участке 11``` лопасти 6``` в режиме зависания вертолета 1. В режиме зависания подъемная сила является положительной и по существу постоянна по значению. Соответственно, аэродинамический момент Mlift, создаваемый подъемной силой на концевом участке 11```, постоянно направлен во втором угловом направлении, против часовой стрелки на Фигуре 35.
Фигура 28 иллюстрирует изменение во времени подъемной силы на концевом участке 11``` лопасти 6``` в режиме горизонтального полета вертолета 1 со скоростью ниже порогового значения. В этом режиме подъемная сила является положительной, но циклически меняется по значению. Соответственно, аэродинамический момент Mlift, создаваемый подъемной силой на концевом участке 11```, является переменным и направлен во втором угловом направлении, против часовой стрелки на Фигуре 35.
Фигура 29 иллюстрирует режим горизонтального полета вертолета 1 со скоростью выше порогового значения. В этом режиме подъемная сила, действующая на концевой участок 11```, циклически меняется по знаку (положительная и отрицательная, направленная вверх и вниз соответственно) и по значению. В частности (см. Фигуру 33 и 34):
когда лопасть 6``` является наступающей (Фигура 34), т.е. движется к передней части вертолета 1, на концевой участок 11``` действует отрицательная подъемная сила; а
когда лопасть 6``` является отступающей (Фигура 33), т.е. движется к задней части вертолета 1, на концевой участок 11``` действует положительная подъемная сила.
Соответственно, аэродинамический момент Mlift, действующий на концевой участок 11``` лопасти 6```, направлен в первом угловом направлении, по часовой стрелке на Фигуре 35, когда лопасть 6 является наступающей; и направлен во втором угловом направлении, против часовой стрелки на Фигуре 35, когда лопасть 6``` является отступающей.
Моменты Mlift, Mk, Md, Мс создают результирующий момент Mr вокруг оси на концевых участках 11```. Предпочтительно пружина 90```, балласты 91``` и демпфер 92`` выполнены с возможностью направления результирующего момента Mr:
во втором угловом направлении, когда вертолет 1 находится в режиме, зависания или в режиме горизонтального полета со скоростью ниже порогового значения; и
циклически в первом и втором угловых направлениях (соответственно, если лопасть является наступающей или отступающей), когда вертолет 1 находится в режиме горизонтального полета со скоростью выше порогового значения.
В зависимости от ориентации результирующего момента Mr и от конфигурации соединительного средства 60``` концевой участок 11``` поворачивается в первом или во втором угловом направлении или остается зафиксирован под углом относительно основного участка 10.
В частности, в случае, когда результирующий момент Mr направлен в первом угловом направлении, а соединительное средство 60``` установлено в первой конфигурации, концевой участок 11``` поворачивается до первого углового положения.
В случае, когда результирующий момент Mr направлен в первом угловом направлении, а соединительное средство 60``` установлено во второй конфигурации, концевой участок 11``` не поворачивается.
В случае, когда результирующий момент Mr направлен во втором угловом направлении, а соединительное средство 60``` установлено во второй конфигурации, концевой участок 11``` поворачивается до второго углового положения.
В случае, когда результирующий момент Mr направлен во втором угловом направлении, а соединительное средство 60``` установлено в первой конфигурации, концевой участок 11``` не поворачивается.
Кроме того, лопасть 6``` содержит частично свободный упорный элемент 88``` который образует первый и второй упоры для концевого участка 11``` установленного в первом угловом положении и втором угловом положении соответственно.
Предпочтительно упорный элемент 88``` останавливает концевой участок 11``` в первом положении под отрицательным двугранным углом α около 20 градусов относительно плоскости основного участка 10 и во втором положении под нулевым двугранным углом а относительно плоскости основного участка 10.
Более подробно, лопасть 6``` содержит исполнительный механизм 65``` управляемый блоком 66``` управления винта 3```, который может использоваться для установки соединительного средства 60``` либо в первой конфигурации, либо во второй конфигурации.
Более подробно, исполнительный механизм 65``` размещен внутри основного участка 10.
Исполнительный механизм 65``` содержит (Фигуры 22 и 23а):
электродвигатель 70```, управляемый блоком 66``` управления и имеющий выходной вал 71``` вращающийся параллельно оси F;
выходной элемент 73```, скользящий параллельно оси F; и
передаточный механизм 72```, расположенный между электродвигателем 70``` и выходным элементом 73```.
В частности, передаточный механизм 72``` содержит:
вал 74```, вращающийся параллельно оси F, обеспеченный червячным винтом 75``` и имеющий зубчатое колесо 76``` на конце;
зубчатое колесо 77```, зацепленное с зубчатым колесом 76``` и расположенное на осевом конце выходного вала 71```; и
ползун 78```, который свободно скользит параллельно оси F, содержит рейку 79```, зацепленную с червячным винтом 75```, и выполнен с возможностью перемещения за одно целое с выходным элементом 73```.
Выходной элемент 73``` размещен в отделении основного участка 10.
Соединительное средство 60```, в свою очередь, содержит:
множество соединительных элементов 80```, поддерживаемых основным участком 10 и соединенных с выходным элементом 73```; и
множество соединительных элементов 81а```, 81b```, поддерживаемых концевым участком 11```.
В частности, соединительные элементы 81а``` расположены на осевых концах концевых участков 11``` относительно оси F. Соединительные элементы 81b``` (только один из которых показан на Фигурах 22 и 23а) расположены между соединительными элементами 81а``` в осевом направлении и разнесены вдоль оси F.
Соединительные элементы 80``` также разнесены в осевом направлении вдоль оси F.
В частности, каждый соединительный элемент 80``` расположен между смежным соединительным элементом 81а``` и смежным соединительным элементом 81b``` в осевом направлении, или между двумя смежными соединительными элементами 81b```, или между одним смежным соединительным элементом 81b``` и другим смежным соединительным элементом 81а```.
Исполнительный механизм 65``` может быть использован для поочередного зацепления соединительных элементов 80``` с первыми смежными соединительными элементами 81а```, 81b``` в первой конфигурации соединительного средства 60``` или для зацепления соединительных элементов 80``` со вторыми смежными соединительными элементами 81а```, 81b``` во второй конфигурации соединительного средства 60```.
Каждый соединительный элемент 80```, в свою очередь, содержит:
пару осевых концевых дисков 82а```, 82b```, противоположных друг другу и имеющих соответствующие зубчатые поверхности 83а```, 83b```; и
пару односторонних муфт 84```, 85``` свободного хода, расположенных между дисками 82а```, 82b``` в осевом направлении.
Более подробно, поверхности 83а```, 83b``` расположены с соответствующих противоположных осевых сторон односторонних муфт 84```, 85``` свободного хода.
Кроме того, односторонняя муфта 84``` свободного хода обеспечивает вращение диска 82а``` только в первом угловом направлении, а односторонняя муфта 85``` свободного хода обеспечивает вращение диска 82b``` только во втором угловом направлении.
Каждый соединительный элемент 81b``` содержит пару осевых концевых дисков 86а```, 86b```, противоположных друг другу и имеющих соответствующие зубчатые поверхности 87а```, 87b```.
Каждый соединительный элемент 81а``` содержит только один осевой концевой диск 86а```, имеющий соответствующую зубчатую поверхность 87а```.
Поверхности 83а```, 83b``` соединительного элемента 80```обращены к поверхностям 87а``` 87b``` соединительных элементов 81а```, 81b``` которые смежны с ними в осевом направлении.
Исполнительный механизм 65``` может быть использован для смещения соединительных элементов 80``` вдоль оси F:
либо до первого осевого положения, в котором поверхности 83а``` диска 82а``` зацепляются с соответствующими поверхностями 87а```, 87b``` диска 86а``` первых смежных соединительных элементов 81а```, 81b``` для обеспечения зацепления соединительного элемента 80``` и первого смежного соединительного элемента 81а```, 81b```;
либо до второго осевого положения, в котором поверхности 83а``` диска 82а``` зацепляются с соответствующей поверхностью 87а```, 87b``` вторых смежных соединительных элементов 81а```, 81b``` для обеспечения зацепления соединительного элемента 80``` и второго смежного соединительного элемента 81а```, 81b```.
В первом осевом положении односторонние муфты 84``` свободного хода обеспечивают вращение концевого участка 11``` в первом угловом направлении относительно основного участка 10 и предотвращают вращение концевого участка 11``` во втором направлении относительно основного участка 10.
Во втором осевом положении односторонние муфты 85``` свободного хода обеспечивают вращение концевого участка 11``` во втором угловом направлении относительно основного участка 10 и предотвращают вращение концевого участка 11``` в первом направлении относительно основного участка 10.
В частности, зубцы зубчатых поверхностей 83а```, 83b``` и зубцы зубчатых поверхностей 87а```, 87b``` имеют такую форму, что, когда зубчатые поверхности 83а```, 83b``` зацепляются с соответствующими зубчатыми поверхностями 87а```, 87b```, диски 82а```, 86а``` и 82b```, 86b``` могут вращаться за одно целое друг с другом вокруг оси F как в первом, так и во втором угловых направлениях.
Функционирование винта 3``` отличается от винта 3 тем, что угловое положение концевого участка 11``` относительно основного участка 10 определяется результирующим моментом Mr на концевом участке 11``` и положением соединительного средства 60```.
Далее будет описано функционирование винта 3``` начиная с режима зависания вертолета 1 и со ссылкой на одну лопасть 6```.
В этом режиме полета аэродинамический момент Mlift направлен во втором направлении, когда лопасть 6``` является наступающей или отступающей.
Кроме того, блок 66``` управления устанавливает исполнительный механизм 65``` в первом осевом положении. Соответственно, соединительное средство 60``` установлено в первой конфигурации (показана на Фигуре 22), в которой оно предотвращает вращение концевого участка 11``` во втором угловом направлении относительно основного участка 10 и обеспечивает вращение концевого участка 11``` только в первом угловом направлении относительно основного участка 10.
Соответственно, концевой участок 11``` удерживается в первом угловом положении, в котором он образует отрицательный двугранный угол α относительно основного участка 10.
Кроме того, концевой участок 11``` упирается в упорный элемент 88``` который предотвращает дальнейшее вращение в первом угловом направлении и последующее нежелательное увеличение отрицательного двугранного угла α.
Когда соединительное средство 60``` установлено в первой конфигурации, соединительные элементы 80``` зацепляются с соединительными элементами 81а```. Конкретнее, поверхности 83b``` дисков 82b``` зацепляются с поверхностями 87а```, 87b``` диска 86а```, 86b``` первого смежного соединительного элемента 81а```, 81b```. Кроме того, односторонняя муфта 84``` свободного хода обеспечивает вращение концевого участка 11``` в первом угловом направлении относительно основного участка 10 и предотвращает вращение концевого участка 11``` во втором угловом направлении.
В случае необходимости работы вертолета 1 в режиме горизонтального полета блок 66``` управления устанавливает исполнительный механизм 65``` во втором осевом положении. Вследствие этого соединительное средство 60``` также устанавливается во второй конфигурации (Фигура 23а), в которой оно обеспечивает вращение концевого участка 11``` относительно основного участка 10 во втором угловом направлении и предотвращает вращение концевого участка 11``` в первом угловом направлении.
Благодаря тому, что соединительное средство 60``` установлено во второй конфигурации, концевой участок 11``` дополнительно поворачивается во втором угловом направлении только до тех пор, пока он не достигнет второго углового положения, в котором двугранный угол α является по существу нулевым. Во втором угловом положении концевой участок 11``` упирается в упорный элемент 88```, который предотвращает дальнейшее вращение во втором угловом направлении и последующее нежелательное увеличение положительного двугранного угла.
В частности, когда соединительное средство 60``` установлено во второй конфигурации, блок 66``` управления устанавливает исполнительный механизм 65``` во втором осевом положении (Фигура 23а).
В связи с этим соединительные элементы 80``` зацепляются со вторыми смежными соединительными элементами 81а```, 81b```. Конкретнее, поверхности 83а``` дисков 82а``` зацепляются с поверхностями 87а```, 87b``` диска 86а```, 86b``` вторых смежных соединительных элементов 81а```, 81b```. Кроме того, односторонние муфты 85``` свободного хода обеспечивают вращение концевого участка 11``` во втором направлении относительно основного участка 10 и предотвращают вращение концевого участка 11``` в первом направлении.
В случае необходимости работы вертолета 1 в режиме зависания блок 66``` управления снова устанавливает исполнительный механизм 65``` в первом осевом положении. Вследствие этого соединительное средство 60``` также устанавливается в первой конфигурации (Фигура 23а), в которой оно обеспечивает вращение концевого участка 11``` относительно основного участка 10 только в первом угловом направлении и предотвращает вращение концевого участка 11``` во втором угловом направлении.
Увеличение горизонтальной скорости вертолета 1 при скорости выше порогового значения вызывает:
положительную подъемную силу, действующую на концевой участок 11``` как наступающей, так и отступающей лопасти 6```, когда горизонтальная скорость вертолета 1 все еще ниже порогового значения; и
положительную подъемную силу, действующую на концевой участок 11``` отступающей лопасти 6```, и отрицательную подъемную силу, действующую на концевой участок 11``` наступающей лопасти 6```, когда горизонтальная скорость вертолета 1 выше порогового значения.
Соответственно, когда вертолет 1 все еще находится в режиме горизонтального полета со скоростью выше порогового значения, концевой участок 11``` снова поворачивается в первом угловом направлении до тех пор, пока он не достигнет первого положения. Это связано с тем, что, при отрицательной подъемной силе на концевом участке 11``` наступающей лопасти 6``` результирующий момент Mr на концевом участке 11``` направлен в первом направлении, когда лопасть 6``` является наступающей.
В это время вертолет 1 переходит в режим зависания.
Обратимся к Фигурам 36-38, ссылочная позиция 3```` в целом обозначает винт в соответствии с пятым вариантом выполнения настоящего изобретения.
Винт 3```` отличается от винта 3``` тем, что каждый соединительный элемент 80````, в свою очередь, содержит:
кольцевую раму 95````, соединенную с ползуном 78``` и выполненную с возможностью перемещения параллельно оси F вместе с ползуном 78````;
пару осевых концевых дисков 82а````, 82b```` (86а````, 86b````), противоположных друг другу и имеющих соответствующие зубчатые поверхности 83а````, 83b``` (87а```, 87b```);
вал 99````, соосный с осью F; и
пару элементов 96```` расположенных на соответствующих осевых концах вала 99```` и прикрепленных к соответствующим дискам 82а````, 82```` (86а```, 86b```).
Более подробно, зубцы зубчатой поверхности 83а````, 83b```` и зубцы зубчатых поверхностей 87а````, 87b```` имеют такую форму, что, когда зубчатые поверхности 83а````, (83b````) зацепляются с соответствующей зубчатой поверхностью 87а```` (87b````) первого (второго) смежного углового соединительного элемента 81а````, 81b``` вращение диска 86а```` (86b````) в первом. (втором) угловом направлении вызывает прерывистое зацепление зубчатых поверхностей 87а````, 87b````.
В частности, прерывистое зацепление вызывает продольное перемещение поверхностей 83а```` (83b````) в направлении поверхности 87а```` (87b````) и от нее параллельно оси F.
Кроме того, зубцы зубчатой поверхности 83а````, 83b```` и зубцы зубчатых поверхностей 87а````, 87b```` имеют такую форму, что, когда зубчатые поверхности 83а````, (83b````) зацепляются с соответствующей зубчатой поверхностью 87а```` (87b````), предотвращается вращение диска 86а```` (86b````) во втором (первом) угловом направлении.
В проиллюстрированном варианте выполнения элементы 96```` выполнены с возможностью углового перемещения за одно целое с валом 99```` вокруг оси F и скольжения в осевом направлении относительно вала 99```` вдоль оси F.
В проиллюстрированном варианте выполнения зубцы поверхностей 83а````, 83b```` и 87а````, 87b```` имеют форму зубцов пилы.
В проиллюстрированном варианте выполнения элементы 96```` являются шлицевыми с соответствующих сторон, обращенных к оси F, тогда как вал 99```` является шлицевым с противоположной стороны относительно оси F.
Кроме того, каждый соединительный элемент 80````, в свою очередь, содержит, упругое средство 100````, расположенное между рамой 95```` и элементами 96````. Упругое средство 100```` упруго нагружает элементы 96``` и диски 82а````, 82b```` в направлении смежных дисков 8ба````, 86b```` смежного соединительного элемента 81а````, 81b````.
Конкретнее, упругое средство 100```` содержит множество пружин 101```` винтовых пружин в проиллюстрированном варианте выполнения, расположенных между рамой 95```` и элементами 96````.
Пружины 101```` продолжаются вдоль соответствующих осей, параллельных оси F, и разнесены под углом вокруг оси F.
Функционирование винта 3```` отличается от винта 3``` тем, что, когда соединительное средство 60```` установлено в первой конфигурации (Фигура 36), зубчатые поверхности 83а```` дисков 82a```` зацепляются с зубчатыми поверхностями 87а```` дисков 86а````, тогда как зубчатые поверхности 83b```` дисков 82b```` разнесены от зубчатых поверхностей 87b```` дисков 86b```` в осевом направлении.
За счет формы зубцов поверхностей 83а````, 87а```` зацепление между дисками 82а````, 86а```` обеспечивает прерывистое угловое вращение дисков 86а```` и, следовательно, концевого участка 11```` в первом угловом направлении относительно дисков 82а```` и, следовательно, основного участка 10.
Это прерывистое угловое вращение формируется последовательностью чередующихся первых временных интервалов, в течение которых зубцы поверхностей 83а````, 87а```` зацеплены друг с другом, и вторых временных интервалов, в течение которых зубцы поверхностей 83а````, 87а```` расцеплены.
В течение первых временных интервалов поверхности 83а```` вращаются в первом угловом направлении, тем самым вращая концевые участки 11````.
В течение вторых временных интервалов поверхности 83а```` не вращаются, и осевое расцепляющее перемещение поверхности 82а```` вызывает осевое перемещение элементов 96```` от поверхностей 83а```` и сжатие пружин 101````. Последующее растяжение пружины 101```` вызывает зацепление зубцов поверхностей 83а````, 87а```` соответствующих дисков 82а````, 86а````.
Когда соединительное средство 60```` установлено во втором угловом положении, зубцы поверхностей 83b````, 87b```` зацеплены друг с другом, тем самым предотвращая вращение дисков 86b``` и, следовательно, концевого участка 11 в первом угловом направлении и позволяя прерывистое угловое вращение дисков 86b``` и, следовательно, концевого участка 11 во втором угловом направлении.
После рассмотрения характеристик винта 3, 3` 3``, 3``` и 3```` и способа в соответствии с настоящим изобретением очевидны преимущества, которые могут быть достигнуты.
В частности, концевой участок 11 каждой лопасти 6 выполнен с возможностью выборочного перемещения между:
соответствующим первым положением, в котором положительный/отрицательный двугранный угол α относительно основного участка 10 не равен нулю (Фигуры 4-6); и
соответствующим вторым положением, в котором угол β стреловидности относительно основного участка 10 не равен нулю (Фигуры 7-9).
Таким образом, в отличие от винтов известных типов, описанных в вводной части настоящего описания, винт 3, 3` 3`` и 3``` одновременно обеспечивает:
высокую аэродинамическую эффективность, когда вертолет 1 находится в режиме зависания, и лопасти 6 находятся в соответствующих первых положениях; и
низкий уровень шума, когда вертолет 1 находится в режиме горизонтального полета, и лопасти 6 находятся в соответствующих вторых положениях.
Такое поведение, оптимизированное как для режима зависания, так и для режима горизонтального полета, достигается особенно простым образом и по существу с нулевым смещением центра масс лопастей 6 вдоль осей С и D между соответствующим первым и вторым положениями.
Таким образом, двигатель 20 не должен противодействовать высоким нагрузками из-за центробежной силы и должен создавать лишь относительно низкие приводные силы. В результате двигатель 20 может иметь компактные размеры и низкую стоимость.
В связи с тем, что перемещение концевых участков 11 и 11`` не приводит к существенному изменению положения центра масс соответствующих лопастей 6 вдоль осей С и D, неправильная работа одного или более двигателей 20 и, следовательно, неправильное размещение соответствующего концевого участка 11 и 11`` не вызывает инерционную разбалансировку винта 3, 3` и 3``.
В связи с тем, что двигатель 20 размещен в основном участке 10, а участки 25 и 26 стержней 21 размещены в концевых участках 11, аэродинамический профиль лопастей 6 винта 3, 3` и 3`` не изменяется, и не оказывает влияния на общую аэродинамическую эффективность вертолета 1.
Наконец, соединительное средство 60```, 60```` может быть выборочно установлено в первой (второй) конфигурации, в которой оно обеспечивает вращение концевого участка 11``` в первом (или во втором) угловом направлении до первого (второго) углового положения и предотвращает вращение концевого участка 11```, 11```` во втором (или в первом) угловом направлении относительно основного участка 10.
Таким образом, можно перемещать концевые участки 11```, 11```` между первым и вторым угловыми положениями, используя тот факт, что результирующий момент Mr на концевых участках 11```, 11````:
направлен во втором угловом направлении, когда вертолет 1 находится в режиме зависания или в режиме горизонтального полета со скоростью ниже порогового значения; и
направлен в первом угловом направлении, когда соответствующие лопасти 6``` являются наступающими, и вертолет 1 находится в режиме горизонтального полета со скоростью выше порогового значения.
Фактически, при необходимости перемещения концевых участков 11```, 11```` в первое угловое положение с целью увеличения отрицательного двугранного угла α достаточно, чтобы исполнительный механизм 65``` установил соединительное средство 60```, 60```` в первой конфигурации, и чтобы горизонтальная скорость вертолета 1 была выше порогового значения.
В отличие от этого при необходимости перемещения концевых участков 11``` 11```` во второе угловое положение с целью уменьшения отрицательного двугранного угла α, достаточно, чтобы исполнительный механизм 65``` установил соединительное средство 60```, 60```` во второй конфигурации для любого режима зависания или горизонтальной скорости вертолета 1.
Соответственно, можно регулировать отрицательный двугранный угол концевых участков 11```, 11```` относительно основного участка 10 просто за счет аэродинамических сил и предпочтительно упругого момента Mk, создаваемого пружиной 90```, и/или демпфирующего момента Md, создаваемого демпфером 92```.
Следовательно, отсутствует необходимость обеспечения специальной приводной системы для регулировки положительного/отрицательного двугранного угла концевых участков 11```, 11````, относительно основного участка 10.
Это особенно предпочтительно, так как отсутствует необходимость передачи большой мощности на вращающиеся лопасти 6```.
Кроме того, отсутствует необходимость обеспечения необходимого пространства для приводной системы на границе между основным участком 10 и концевыми участками 11```, 11````. Поэтому последние могут иметь оптимальную форму, соответствующую требованиям к аэродинамике.
Наконец, также следует понимать, что модификации и изменения в отношении винта 3, 3`, 3``, 3``` и 3```` и способа, описанных и проиллюстрированных в настоящем документе, могут быть выполнены без отклонения от объема, определенного формулой изобретения.
В частности, винт 3, 3`, 3``, 3```, и 3````, может быть использован в конвертоплане, а не в вертолете 1.
Кроме того, концевые участки 11 и 11`` могут иметь положительные двугранные углы α в соответствующих первых положениях и отрицательные углы β стреловидности в соответствующих вторых положениях.
Передаточный блок 22 может содержать планетарную передачу, расположенную между двигателем 20 и стержнями 21.
Исполнительные блоки 16 могут быть полностью размещены внутри концевых участков 11 соответствующих лопастей 6.
Винт 3` может не иметь передаточного блока 22 и может содержать множество двигателей 20, соединенных с соответствующими стержнями 21.
Наконец, что касается винта 3```, 3````, первое и второе угловые положения концевых участков 11```, 11```` также могут соответствовать положительным двугранным углам относительно основного участка 10 и могут быть достигнуты в режимах полета, отличных от рассмотренных в настоящем описании.
Реферат
Изобретение относится к области авиации, в частности к конструкциям винтокрылых летательных аппаратов. Винт (3, 3`, 3``) для летательного аппарата (1), выполненного с возможностью зависания, содержит: втулку (7), вращающуюся вокруг первой оси (А), и по меньшей мере две лопасти (6), шарнирно соединенные с втулкой (7). Каждая лопасть (6) содержит основной участок (10), шарнирно соединенный с втулкой (7), и концевой участок (11, 11``), который наиболее удален в радиальном направлении от первой оси (А) относительно соответствующего основного участка (10). Концевой участок (11, 11``) каждой лопасти (6) выполнен с возможностью выборочного перемещения относительно соответствующего основного участка (10) лопасти (6) между первым положением, в котором он образует положительный или отрицательный двугранный угол (α) относительно соответствующего основного участка (10), и вторым положением, в котором он образует положительный или отрицательный угол (β) стреловидности относительно соответствующего основного участка (10). Обеспечивается сохранение аэродинамической эффективности в режиме зависания и снижение уровня шума в режиме горизонтального полета. 8 н. и 41 з.п. ф-лы, 38 ил.
Комментарии