Транспортное устройство многоразового использования - RU2759060C1
Код документа: RU2759060C1
Чертежи

Описание
Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим многоразовый запуск космических аппаратов.
Известен запуск космических аппаратов (далее - КА) в виде возвращаемых или одноразового использования с помощью самолётов большой грузоподъёмности, при котором КА закреплён посредством специальных, отсоединяемых в нужное время полёта, замков, на самолёте–носителе (летательный аппарат, далее - ЛА), в верхней его части или подвешенный внизу фюзеляжа или крыла ЛА, в зависимости от веса и габаритов КА. При достижении максимально возможной высоты полёта, КА отсоединяется от ЛА и продолжает полёт самостоятельно с помощью собственной тяговой установки до выхода на необходимую расчётную высоту орбиты или траекторию полёта в открытом космосе.
Возможен запуск КА в виде отделяемого модуля от ракеты-носителя (далее - РН) с реактивной тягой (см. https://www.cnews.ru/articles/na_smenu_sputnikamgigantam_pridut, https://aftershock.news/?q=node/373248&full,
https://kzpatents.com/0-pp6841-sposob-zapuska-kosmicheskogo-korablya-varianty-puskovojj-letatelnyjj-apparat-dlya-zapuska-kosmicheskogo-korablya-buksiruemyjj-samoletom-varianty-buksirovochnyjj-kompleks-dlya-zapus.html ).
К недостаткам известных систем запусков можно отнести:
Ограниченные габариты КА;
Ограниченные техническими характеристиками конкретных моделей ЛА и РН весовые параметры КА;
Недостаточная разница в экономике запусков, условной стоимости вывода на орбиту единицы веса.
В настоящее время возможности вновь создаваемых РН превысили возможности существующих и проектируемых ЛА большой грузоподъёмности, а строительство специальных ЛА и их инфраструктуры по «старой» схеме сводит на нет стоимость таких проектов.
Известно устройство для запуска космических аппаратов с использованием тепловой энергии, содержащее ствол, крышку, корпус, электростатическую защиту, взрывчатое вещество, электрод, диод, трансформатор, генератор, выключатели и запальное устройство, отличающееся тем, что корпус крышка и ствол изготовлены из диэлектрического материала, поперечное сечение крышки сужается в направлении ствола, во внутренней полости устройства размещен электрод, соединенный через диод с вторичной обмоткой трансформатора, в первичной обмотке которого создается переменный электрический ток, диод размещен внутри электростатической защиты (патент РФ №2680435, МПК B64G 1/16 (2006.01), 2018 г.).
Известно устройство для доставки грузов на орбиту специальным подъемником в виде отдельно стоящей башни космического лифта для запуска полезных нагрузок, туризма, наблюдений, научных исследований и связи. Башня космического лифта имеет сегментированную конструкцию ядра лифта, каждый сегмент образован, по меньшей мере, одной камерой с пневматическим давлением. Ячейки давления могут быть заполнены воздухом или другим газом. Кабины лифта могут подниматься или опускаться по внешней поверхности основной конструкции лифта или в шахте внутри основной конструкции лифта. Полезная нагрузка может быть запущена из контейнера или палубы на верхнем конце башни космического лифта. Башня космического лифта стабилизирована гироскопической и активной аппаратурой управления. Башня космического лифта поддерживает желаемый уровень давления с помощью газоперекачивающего оборудования. Раскрыты также способы построения космического лифта. (см. патент США № 9085897, US2010163683A1, МПК B64G1/10; B66B11/00; B66B11/04; B66B9/00; E04B1/34; E04H12/00; E04H12/34, 2010 г.)
Космический лифт - это натянутый от поверхности Земли трос и уходящий от нее на 144.000 км в космос.
Грузы на орбиту поднимаются специальным подъемником (а может быть даже не одним) и, согласно расчетам ученых, путь из конца в конец должен занять около 7 суток.
Проект такого масштаба должен быть международным, ведь ни одно государство не осилит его в одиночку. А это в свою очередь вызывает целый ряд проблем и вопросов. Во-первых, на какой территории размещать подобное сооружение? Ведь из-за его исполинских размеров, не избежать нарушения воздушного пространства нескольких государств. Во-вторых, космический лифт необходимо защитить от террористических актов и военных конфликтов.
Пусковая петля или петля Лофстрома - это проект системы кабельного транспорта, предназначенного для вывода грузов на околоземную орбиту. В основе проекта лежит кабель, который непрерывно движется с огромной скоростью (12-14 км/с) внутри вакуумной трубы. Для того чтобы шнур не соприкасался со стенками трубы, они разделены между собой магнитной подвеской.
В целом это устройство является огромным сооружением длиной около 2000 км, а сама петля должна подниматься на высоту до 80 км и удерживаться на ней за счёт момента инерции вращающегося кабеля. Вращение кабеля, по сути, переносит вес всего сооружения на пару магнитных подшипников, которые его поддерживают, по одному на каждом конце. Плюс этой системы в том, что она может обеспечивать запуски космических туристов, обеспечивая относительно мягкий уровень перегрузки, равный 3g.
Пусковая петля ориентирована на перевозки людей, потому что в ней максимальное ускорение 3g является безопасным, подавляющее большинство людей способны его выдержать. Кроме того, она даёт гораздо более быстрый способ достижения космического пространства, чем космический лифт.
Пусковая петля будет работать тихо, в отличие от ракет она не будет оказывать никакого шумового воздействия.
Наконец, низкая стоимость вывода на орбиту полезной нагрузки делает её пригодной даже для колонизации космоса.
Известен проект космического моста, в виде огромного кольца, окружающего Землю по экватору. Часть кольца находится на поверхности планеты, а другая часть выступает в космос. По кольцу выводятся грузы при помощи электромагнитных тележек и приём грузов из космоса. Кольцо удерживается в подвешенном состоянии за счёт внутреннего сердечника-обруча из болванок.
Внутри кольца имеются отсеки для выводимого на орбиту груза и персонала, а также вакуумированный туннель, в котором движется ещё одно кольцо из сцепленных металлических болванок. Болванки могут быть подвешены в магнитном поле и током переменной частоты удерживаться в движении с заданной скоростью. Все это работает примерно так: груз кладется в отсеки, болванки разгоняются до скорости, когда кольцо становится невесомым, силовые приводы удлиняют кольцо, вследствие чего оно оказывается за пределами атмосферы. Если изменить скорость движения болванок, за счёт закона сохранения импульса движения кольцо начнёт вращаться вокруг Земли. Когда достигается нужная скорость для данной орбиты, отсеки открываются и грузы выводятся на орбиту. Забор грузов с орбиты происходит в обратном порядке.
Недостатки:
Самый главный недостаток, о котором поначалу забыли, это неустойчивость кольца. Простейшие расчёты показывают, что кольцо норовит упасть на поверхность планеты любой своей частью. Другая часть будет выглядывать в Космос.
Кольцо не позволяет выводить грузы куда-либо, кроме экваториальных орбит. Инерция этого огромного сооружения не позволяет его разворачивать на другие орбиты.
Требуется огромная энергия, которую следует откуда-то подводить для разгона болванок и куда-то отводить при их торможении.
StarTram предлагает ускорить беспилотный корабль с перегрузкой 30g через тоннель длиной 130 км, на конце которого находится окно из плазмы, предотвращающее попадание воздуха в тоннель. В идеале окно должно располагаться на горной вершине высотой 6000 км, где запуск будет проводиться под углом 10 градусов со скоростью 8,78 км/с. Так же можно получить бонус от вращения Земли в виде дополнительной скорости, если «стрелять» на восток, что компенсирует потери от прохождения атмосферы.
Сама конструкция будет походить на огромное артиллерийское оружие, длина ствола которого может достигать нескольких километров, либо располагаться вглубь поверхности по принципу ракетной шахты.
Теоретически, такая конструкция позволит разгонять снаряд до необходимой для вывода на стационарную орбиту первой космической скорости (около 8 км/с). Однако достигаемые при таком ускорении перегрузки будут огромны, порядка 100g, а сопротивление воздуха в нижних слоях атмосферы потребует сверхпрочных жаростойких материалов для оболочки «снаряда», так что разумным будет использовать такой метод запуска исключительно для грузов.
Концепция космического фонтана была впервые представлена совместными усилиями Роберта Л. Форварда, Марвина Мински, Джона Маккарти, Ханса Моравеца, Родерика Хайда, и Лоуэлла Вуда. Обширный объем информации о ней можно найти в книге Роберта Л. Форварда «Indistinguishable From Magic».
В отличие от оригинальной конструкции космического лифта, фонтан является чрезвычайно высокой башней, поскольку такая высокая башня не может поддержать свой вес с использованием традиционных материалов, планируется, что этот вес будет поддерживаться следующим образом: внутри башня будет полая, внутри этой полости находятся специальное гранулированное вещество. Это вещество, после передачи ему кинетической энергии, быстро движется вверх от нижней части башни и передает эту энергию в верхней её части, после чего под воздействием силы тяжести падает обратно, это будет удерживать башню от падения.
Космический фонтан использует непрерывный поток электромагнитно-ускоренных металлических гранул, чтобы доставить груз на запредельные высоты, используя те же основные физические принципы, которые обычный фонтан удерживает пластиковый мячик наверху вертикальной струи воды.
Используя эту технологию, фонтан мог бы поднять полностью оборудованную космическую станцию весом 40 тонн или более на любую высоту, даже на высоту космического лифта (40000 км). Однако, чем больше высота, тем больше требуется энергии. Для поддержания космического фонтана около 2000 км в высоту требуется постоянная энергия, сравнимая с потреблением современного города.
Башня фонтана также может быть использована в качестве огромного размера аркологии, исследовательского учреждения, промышленного центра и т.п. Фонтан 100 километров высотой и 100 метров в ширину будет иметь около 7,85 кубических километров объема. Дизайнеры и архитекторы могут использовать это пространство для чего угодно. Но ведь возможны и более широкие и вместительные башни.
Его основной недостаток это то, что он является активной структурой и поэтому требует постоянной энергии (см. https://aftershock.news/?q=node/373248&full).
Инженер Джеймс Пауэлл, обладатель медали Бенджамина Франклина за изобретение новой технологии магнитной левитации, запатентовал электромагнитную пушку для запуска кораблей в космос без помощи ракет. Система использует технологию вакуумного транспорта Hyperloop.
Патент объединяет технологии маглев-поездов Hyperloop с аэрокосмическими разработками. Пауэлл представил улучшенную конструкцию безракетного запуска аппаратов весом до 100 кг, которую назвал SpaceTram («Космический трамвай»).
Принцип работы «трамвая» таков: на Земле строится огромная вакуумная труба наподобие Hyperloop, один конец которой направлен под углом вверх. Поскольку трение в ней отсутствует, объект, помещенный внутрь, способен разогнаться до скорости, близкой ко второй космической. Таким образом, он либо начнет удаляться от планеты, преодолев ее гравитацию, либо станет вращаться на орбите, как спутник. (см.https://yandex.ru/turbo/hightech.fm/s/2017/02/27/maglev-space).
Таким образом, в настоящее время любой из представленных способов и устройств является недостижимым, что обусловлено экономической несостоятельностью, отсутствием необходимых технологий и материалов.
Известно электромагнитное приводное устройство, содержащее направляющий элемент с размещенным внутри него левитирующим элементом. Направляющий элемент имеет дугообразное поперечное сечение с кромками, направленными навстречу друг другу. На внутренней стороне кромок установлены постоянные магниты. Левитирующий элемент имеет крестообразное поперечное сечение, образованное поперечной и вертикальной частью, которая частично выступает за пределы контура направляющего элемента. На торцевых частях поперечины установлены постоянные магниты, взаимодействующие с постоянными магнитами, установленными на внутренней стороне кромок направляющего элемента. Электромагнитное приводное устройство содержит приводной линейный двигатель, за счет которого осуществляется перемещение. Постоянные магниты могут быть установлены как на внутренней поверхности направленных навстречу друг другу кромок, так и на двух и более специальных поверхностях, выполненных на кромках и расположенных под углом. Выполнение направляющего элемента с дугообразным поперечным сечением, образованным направленными навстречу друг другу кромками, обеспечивает стабилизацию центровки левитирующего элемента и направляющего элемента относительно друг друга, а также надежную левитацию элемента при любых траекториях движения, например, по спирали, как в вертикальной, так и в горизонтальной плоскости. Технический результат от использования всех существенных признаков полезной модели заключается в повышении надежности и безопасности устройства при его перемещении по траекториям различной сложности, в том числе кольцевым вертикальным траекториям (см. патент РФ №198335, МПК B60L 13/10 (2006.01), B61B 13/08 (2006.01), H02K 41/02 (2006.01), 2020 г.).
Известна система запуска космических аппаратов, включающая в себя линейный электропривод со статором в виде кольцеобразных обмоток, внутри которых размещен сердечник, представляющий собой магнитную оболочку ракеты, несущей космический аппарат, отличающаяся тем, что обмотки статора установлены на эстакаде, состоящей из отдельных элементов, снабженных опорами. А ракета с космическим аппаратом размещена в указанной оболочке с возможностью выталкивания из нее, причем в оболочке установлен срабатывающий в конце эстакады заряд, выстреливающий из оболочки ракету и тормозящий оболочку.
Указанные опоры снабжены сейсмозащитными устройствами и системой, следящей за смещением указанных элементов эстакады относительно друг друга и обеспечивающей перед запуском ракеты с космическим аппаратом устранение этих смещений так, чтобы центр каждой предыдущей вдоль эстакады обмотки статора на ее выходе совпадал с центром последующей обмотки статора на ее входе (патент РФ №2239586, МПКB64G 5/00 (2000.01), 2004 г.).
Недостатки:
1. Невозможность решить проблему вывода на орбиту планеты космических аппаратов (КА) с большим весом и более широкими возможностями вариабельности их габаритов и формы.
2. Данная система не позволяет расширить сферу её применения в транспортных воздушных сообщениях на низких высотах, улучшить экологию полётов.
Известен лопастный электромагнитный движитель, содержащий корпус с установленными в нем магнитными элементами чередующейся полярности, представляющими собой вторичный элемент синхронной машины. Внутри корпуса на оси вращения посредством, по меньшей мере, одной центрирующей опоры установлены лопасти. На концевой части лопасти установлены, по меньшей мере, два электромагнита, представляющие собой первичный элемент синхронной машины, токосъемный узел электроснабжения электромагнитов, по меньшей мере, один датчик положения ротора (см. патент РФ № 2649838, МПК B64G 5/00 (2000.01), 2018 г.)
Недостатком указанного устройства является низкий КПД, что связано с расположением оси вращения лопастей по центру.
Известный уровень техники не содержит близких решений.
Техническая проблема, решаемая изобретением, заключается в обеспечении вывода на орбиту планеты космических аппаратов (КА) с большим весом и более широкими возможностями вариабельности их габаритов и формы.
Поставленная техническая проблема решена за счет того, что разработано транспортное устройство многоразового использования, выполненное в виде кольцевого модуля, содержащего каркас, снабженный стыковочными элементами, с размещенными в каркасе аккумулирующими энергоустановками, блоком управления с интегрированной структурой подвода энергии к приводным элементам, снабженным управляющими элементами и расположенным по окружности каркаса на расстоянии друг от друга, причем, с внутренней стороны каркаса расположены направляющие элементы, снабженные движимыми элементами, выполненными с возможностью кругового движения по направляющим элементам и снабженными шарнирно закрепленными на них лопастями и датчиками, движимые элементы взаимосвязаны с интегрированной структурой передачи энергии управления.
С внутренней стороны каркаса кольцевого модуля могут быть установлены две и более направляющих с приводными элементами, выполненными с возможностью движения в одном направлении или разно направленным согласованным движением.
Технический результат от использования всех существенных признаков изобретения заключается в обеспечении вывода на орбиту планеты космических аппаратов (КА) с большим весом и более широкими возможностями вариабельности их габаритов и формы. Кроме того, разработанное устройство позволяет расширить сферу его применения в транспортных воздушных сообщениях на низких высотах и значительно улучшить экологию полётов.
Разработанное транспортное устройство многоразового использования, выполненное в виде кольцевого модуля, содержащего каркас, снабженный элементами захвата, с размещенными в каркасе аккумулирующими энергоустановками, блоком управления с интегрированной структурой подвода энергии к приводным элементам, снабженным управляющими элементами и расположенным по окружности каркаса на расстоянии друг от друга, в котором с внутренней стороны каркаса расположены направляющие элементы, снабженные движимыми элементами, выполненными с возможностью кругового движения по направляющим элементам и снабженными шарнирно закрепленными на них лопастями и датчиками, при этом движимые элементы взаимосвязаны с интегрированной структурой передачи энергии управления, позволяет обеспечить вывод на орбиту планеты космических аппаратов (КА) с большим весом и более широкими возможностями вариабельности их габаритов и формы. Кроме того, разработанное устройство расширяет сферу применения в транспортных воздушных сообщениях на низких высотах и позволяет улучшить экологию полётов.
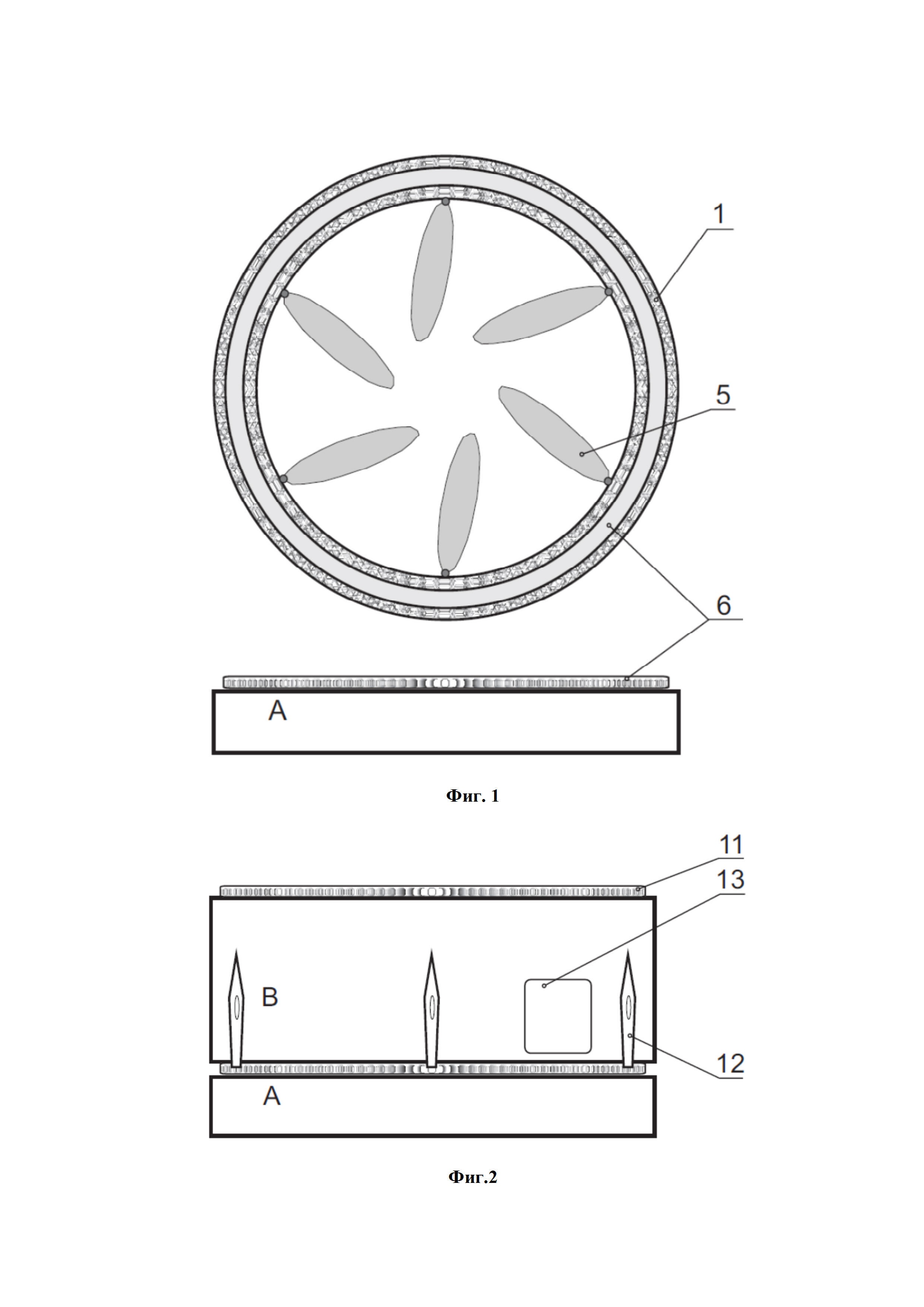
Фиг.1 - кольцевой модуль, вид сверху.
Фиг.2 - кольцевой модуль в сборе с грузовым модулем.
Фиг. 3 - частичный вид кольцевого модуля в разрезе.
Фиг. 4 - пример полета и отсоединения модулей.
Термины и обозначения:
1 - Каркас
2 - Аккумулирующая энергоустановка
3 - Направляющая
4 - Движимый элемент
5 - Лопасть
6 - стыковочный элемент каркаса модуля А
7 - Датчик
8 - Приводной элемент
9 - управляющий элемент
10 - Блок управления
11 - Стыковочный элемент
12 - Ракетный ускоритель
13 - Энергоустановка.
Транспортное устройство многоразового использования, выполнено в виде кольцевого модуля А, который конструктивно состоит (см. фиг. 3) из несущей части – каркаса 1, снабженного стыковочными элементами 6. В каркасе размещены аккумулирующие энергоустановки 2, блок управления 10 с интегрированной структурой подвода энергии к приводным элементам 8. Под интегрированной структурой подвода энергии понимается проводная система электроуправления и доставки энергии до всех исполнительных механизмов. Приводные элементы 8, создающие электромагнитные импульсы, снабжены управляющими элементами 9 и расположены по окружности каркаса 1 на расстоянии друг от друга.
В качестве приводного элемента 8 может быть использован любой конструктивный элемент, создающий импульс силы, необходимый для придания движения движимому элементу 4, направленный по касательной к направлению движения по траектории направляющей. Под приводным элементом 8 понимаются различные существующие конструктивные решения - электромагнитный индуктор или форсунка с направленным соплом выхода сжатого воздуха или жидкости, воздействующих своей реактивной силой электромагнитной природы или энергией направленного воздействия струи на ответную часть движимого элемента 4.
В качестве управляющего элемента 9 может быть использован конструктивный элемент, использующий различные существующие конструктивные решения, основанные на электронных компонентах электроуправления включением и выключением электромагнитных индукторов или в виде электроклапанов управления подачей сжатого воздуха или жидкости в форсунки приводных элементов 8.
С внутренней стороны каркаса 1 расположен направляющий элемент 3 (например, монорельс или иной подобный элемент), снабженный движимыми элементами 4, на каждом из которых шарнирно закреплена лопасть 5. Движимые элементы 4 выполнены с возможностью кругового движения по направляющим элементам 3, а лопасти 5 выполнены с возможностью вращения.
В качестве движимого элемента 4 может быть использована конструкция, которая включает в себя основу, в виде корпуса или каркаса с интегрированными скользящими элементами/частями(элементами скольжения), которые могут быть контактными или бесконтактными с поверхностью направляющего элемента 3. Скользящие элементы/части (элементы скольжения) своим количеством и расположением обеспечивают фиксацию основы и прикреплённого на ней полезного груза (в данном случае - аэродинамической лопасти 5) в заданном положении в пространстве при движении по заданной направляющим элементом 3 траектории с учётом статической нагрузки, а так же возникающих динамических нагрузок при допустимых скоростях движения. Под скользящими элементами/частями (элементами скольжения) понимаются различные существующие конструктивные решения - подшипник скольжения, например, контактный вариант, низкофрикционные материалы по материалу или, в том числе, бесконтактный вариант, с использованием магнитных, гидро- или воздушных подушек.
Лопасти 5 могут быть расположены в направлении к центру вращения, или в направлении от центра вращения. Лопасти 5 при движении создают регулируемую аэродинамическую подъёмную силу. Положение лопастей 5 обеспечивается применяемым конструктивным решением, которое обуславливает расположение места крепления лопасти на соответствующем движимом элементе 4 с учётом различных их форм, например линейной, направленной к центру, как показано на фиг.3 или Г-образной и других форм.
Движимые элементы 4 снабжены датчиками 7 и дистанционно взаимосвязаны с работой приводных элементов 8 через блок управления 10 управляющих элементов 9, а также с интегрированной структурой передачи энергии управления.
Управляющий элемент 9, соответствующего приводного элемента 8, обеспечивает подачу электрической энергии переменной мощности для создания соответствующим приводным элементом 8 кратковременного электромагнитного импульса, в момент, когда в поле его действия попадает датчик 7, принадлежащий соответствующему движимому элементу 4, перемещающемуся по направляющим элементам 3. В момент производства электромагнитного импульса приводным элементом 8, движимый элемент 4 получает необходимое ускорение, имеющее циклический характер.
Транспортное устройство многоразового использования, выполненное в виде кольцевого модуля А, предназначено для подъема на необходимую высоту грузового модуля В и снабжено стыковочными элементами 6, расположенными по окружности и закрепленными на каркасе 1. Стыкуемый с транспортным устройством – кольцевым модулем А, грузовой модуль В снабжен ответными стыковочными элементами 11 (см. фиг.2). С помощью указанных стыковочных элементов кольцевой модуль А соединяется в единое целое с модулем В. Грузовой модуль В может быть отсоединен от кольцевого модуля А при совместном достижении максимально возможной высоты полёта, которая может быть обеспечена аэродинамической тягой кольцевого модуля А. После отсоединения кольцевой модуль А при посадке использует аккумулирующие энергоустановки 2 и управляемо возвращается на исходную или другую заданную точку для обслуживания и повторного использования.
Грузовой модуль В (см фиг.2), например, космический аппарат (КА), снабжен ракетными ускорителями 12 (ступени ракетоносителя (РН) с запасом компонентов топлива и системами стабилизации и ориентации в пространстве, необходимыми и рассчитанными для вывода грузового модуля на требуемую высоту орбиты и заданную скорость.
Грузовой модуль В оснащен автономной силовой энергоустановкой 13, обеспечивающей питание систем грузового модуля В, а также систем привода и аккумулирующих энергоустановок 2 (см. фиг.3) транспортного устройства многоразового использования А на этапе совместного полёта, а также функционирование его систем на орбите или в открытом космосе. Грузовой модуль В также имеет свой блок управления.
Соединение-отсоединение модулей А и В может быть осуществлено применяемыми сегодня конструктивными решениями с использованием существующих материалов, посредством стыковочных элементов 6, 11.
Стыковочные элементы 6. 11 могут быть выполнены в виде специальных каркасных модулей с захватами или замками с использованием различных существующих конструктивных решений по периметру модулей B для их стыковки с модулем А или между собой.
В качестве энергоустановки 13, в зависимости от размеров модулей, могут быть применены существующие электростанции/энергетические установки (доработанные с точки зрения снижения полётного веса и выполнения специфических условий эксплуатации и безопасности) с использованием энергии приемлемого вида топлива, например, газа или ядерного топлива.
В транспортном устройстве многоразового использования, выполненном в виде кольцевого модуля А, может быть установлено совместно два и более направляющих элемента 3 с одно- и разнонаправленным согласованным движением движимых элементов 4, компенсирующих реактивную силу друг друга.
Транспортное устройство многоразового использования, выполненное в виде кольцевого модуля А+, может использоваться и на малых высотах атмосферы как воздушный транспорт для контейнерных перевозок.
Работа устройства основана на известном физическом факте: импульсное магнитное поле, создаваемое в приводных элементах 8, "тянет/толкает" за собой/от себя любой проводящий материал в данном случае - движимые элементы 4. Объясняется просто: создаваемый импульс магнитного поля индуцирует в проводнике силу отталкивания/притяжения, используемую для движения по направляющей 3.
Возможно применение электродинамических принципов с полым ротором, используемых в существующих электродвигателях, которые можно использовать ввиду большего веса в устройствах с малым диаметром и только по одному радиусу. В этом случае приводные элементы 8 выполняются в виде кольца с электромагнитными обмотками – статора, а движимые элементы 4 соединяются в кольцо ротора.
Возможно использование энергии сжатого воздуха для этих целей, где приводные элементы 8 выполнены в виде форсунок с направленным соплом для выхода реактивной струи сжатого воздуха по направлению касательному к направлению движения движимого элемента 4, имеющего экран для приёмки давления струи, посредством чего осуществляется передача движения по направляющей 3. Форсунки приводных элементов 8 также имеют управляющий элемент 9 (кран) открывающий/закрывающий поступление сжатого воздуха в сопла, управляемые блоком управления 10, при прохождении датчика 7 движимых элементов 4 в зоне дистанционного воздействия на управляющий элемент (кран) 9 (при малых размерах и высокой частоте вращения может работать с постоянно открытыми кранами, аналогично воздушной турбине). Сжатый газ/воздух создаётся компрессором энергоустановки 13, которая в данной модификации может быть расположена на модуле А, в виде одной или нескольких аккумулирующих энергоустановок 2, без её размещения на модуле В.
К преимуществам заявленного транспортного устройства следует отнести:
1. Увеличение КПД аэродинамической конструкции кольцевого модуля по сравнению с центрально расположенным винтом.
2. Возможность доставки на космическую орбиту грузов с большим весом.
3. Снижение себестоимости перевозки груза.
4. Возможность доставки на космическую орбиту грузов с различной формой с меньшими требованиями по аэродинамическим параметрам.
5. Условно вертикальный подъём обеспечивает достаточные условия безопасности в небольшом ареале падения модулей в аварийной ситуации, с возможностью безаварийной посадки в случае нештатной ситуации в интервале старта до точки «невозврата».
6. Снижение затрат на строительство стартовой площадки.
7. Снижение вредного воздействия на окружающую среду.
Реферат
Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим набор высоты. Транспортное устройство многоразового использования для подъема на необходимую высоту грузового модуля выполнено в виде кольцевого модуля, содержащего каркас, снабженный стыковочными элементами. В каркасе размещены аккумулирующие энергоустановки, блок управления с интегрированной структурой подвода энергии движения и управления к приводным элементам. Приводные элементы снабжены управляющими элементами и расположены по окружности каркаса на расстоянии друг от друга. С внутренней стороны каркаса расположены направляющие элементы, снабженные движимыми элементами. На последних шарнирно закреплены лопасти и датчики. Движимые элементы взаимосвязаны с интегрированной структурой подвода энергии. Достигается возможность повышения массы грузового модуля. 1 з.п. ф-лы, 4 ил.
Комментарии