Вертолёт "клён" с изменяемой центровкой - RU168875U1
Код документа: RU168875U1
Чертежи








Описание
Полезная модель относится к авиационной технике, в частности к вертолетам высокой маневренности с повышенным уровнем безопасности для экипажа, и может быть использована при создании новых конструкций вертолетов, включая беспилотные, для различных областей хозяйственной деятельности и в военных целях.
Из предшествующего уровня техники известна полезная модель «Гидроавтожир», RU №84340 U1 от 23.01.2009, которая содержит корпус, установленный на поплавках, двигатель с редуктором, несущий винт, тяговый винт, связанный с редуктором, стабилизатор с горизонтальным и вертикальным оперением. При этом редуктор с тяговым винтом установлен с возможностью фиксации его в крайнем верхнем положении и в крайнем нижнем положении, чем достигается основной технический результат - смещение центра тяжести вниз при взлете автожира, путем перевода тягового винта с редуктором из крайнего верхнего положения в крайнее нижнее положение.
Такая конструкция позволяет изменять пилоту центр тяжести машины в вертикальном направлении, чем улучшается ее устойчивость при взлете с поверхности воды.
Недостатком конструкции является жесткая позиционность положений редуктора при вертикальном изменении центра тяжести, а также необходимость силового привода для изменения положения редуктора при одновременном силовом взаимодействии двигателя с редуктором во время вращения тягового винта, при этом изменяется положение тягового винта относительно расчетного центра тяжести машины и в этом случае пилоту важно не пропустить момент "возврата" тягового винта с редуктором в расчетное крайнее верхнее положение, что ставит безопасность полета в зависимость от "ощущений" пилота.
Известен также «Народный вертолет 21 века (варианты)», RU №2364550 С2 от 20.03.2007, который содержит каркас, винтомоторную установку, систему управления, а также корпус вертолета, где установлены аэродинамические крылья путевого продвижения с возможностью взаимодействовать с потоком воздуха, нисходящего от винтов. К тому же сиденья в кабине вертолета имеют возможность изменять свое горизонтальное положение, чем регулируется положение центра тяжести (масс) вдоль продольной оси вертолета.
Недостатком вертолета является ненадежность изменения положения его центра тяжести путем изменения места положения сидений, так как их положение и крепление к нижнему горизонтальному основанию каркаса вертолета является силовым и каждое сиденье, как правило, снабжается ремнями безопасности, прикрепленными к несущим элементам конструкции вертолета, что исключает мобильную смену мест сидений, тем более оперативно и в полете.
Известно техническое решение "Конструкция силового каркаса вертолета", RU №2539612 C2 от 23.04.2013.
Указанный каркас содержит силовое основание, а в средней части силового основания вертикальный силовой набор в виде кессона для установки в его верхней части несущего винта и его привода, при этом боковые стороны кессона в своей нижней части формируют днище, которое образовано панелью с ячеистым наполнителем, ячейки которого ориентированы в плоскости их наименьшей жесткости к вертикали кессона.
Ячеистый наполнитель в аварийной ситуации выполняет функцию буфера, обеспечивая за счет своей низкой жесткости активное смятие с последующим разрушением, чем распределяются и локализируются вертикальные инерционные нагрузки по конструкции кессона и, соответственно, днища и силового основания, вызывая только частичное разрушение винтомоторной группы и фюзеляжа.
Однако описанное техническое решение не обеспечивает целостности базовых элементов конструкции каркаса и других элементов, включая несущий винт с приводом, смонтированных на нем, от воздействия вертикальных инерционных нагрузок в условиях аварийной ситуации вертолета при его жесткой посадке и при посадке в режиме авторотации.
Известно также техническое решение «Летательный аппарат с несущим винтом, снабженным реактивными соплами и подвижным опорным средством», МПК B64C 27/52, 27/18, Франция, патент №2493267 от 10.07.1981, (УДК 629.73 /088.8/, публикация 07.05.1982, №18), по совокупности признаков принятое за прототип.
Вертолет имеет фюзеляж в виде объемного корпуса с силовым основанием и шасси, а также несущий винт реактивного типа, расположенный над фюзеляжем. Опорный узел, поддерживающий винт, содержит пустотелую стойку, установленную внутри подвижного опорного элемента с опорой на узел качания в центральной части фюзеляжа, при этом пилот может смещать стойку с несущим винтом путем наклона ее по радиусу, равному половине вертикального размера фюзеляжа с помощью сервопривода подвижного опорного элемента, для изменения аэродинамического центра тяжести (определение оригинала) летательного аппарата.
Недостатком вертолета является то, что изменение горизонтального положения центра тяжести осуществляется путем наклона оси вращения несущего винта по радиусу, что приводит к наклону плоскости вращения несущего винта относительно продольной оси вертолета, что снижает маневренность вертолета, так как при изменении плоскости вращающегося несущего винта происходит замедление реакции вертолета из-за необходимого, в этом случае, преодоления гироскопического эффекта вращающегося винта, а также происходит изменение положения несущего винта относительно средств путевого управления, что также отрицательно влияет на управляемость и маневренность вертолета.
Задачей заявленной полезной модели является решение проблемы, когда при значительном изменении в полете центровки вертолета из-за изменения положения центра тяжести относительно оси вращения несущего винта изменяется наклон продольной оси фюзеляжа, что вызывает необходимость использовать рабочий диапазон, уменьшая его, управления циклическим шагом несущего винта для выравнивания вертолета, что отрицательно влияет на управляемость и маневренность вертолета.
А также, при жесткой штатной посадке вертолета и посадке в режиме авторотации, его вертикальная скорость и вертикальная инерция массы вертолета часто вызывают частичное разрушение фюзеляжа, что опасно для людей, находящихся в нижней части фюзеляжа, с риском быть травмированными верхней винтомоторной частью вертолета.
А при "утрате" даже части лопасти вертолета, возникающий дисбаланс машины может привести к разрушению фюзеляжа вертолета и к тяжелым последствиям для людей в вертолете.
Поэтому, для решения выше указанных проблем, необходимо расширить летно-технические характеристики вертолета и увеличить безопасность его пилотирования за счет осуществления предварительной до взлета, а также в полете активной адаптации оси вращения несущего винта вертолета относительно его изменяющегося центра тяжести для удерживания центровки вертолета в оптимальных значениях, а также необходимо парирование горизонтального изменения центра тяжести вертолета в полете из-за утраты или использования груза, элементов конструкции вертолета и топлива за счет управляемого изменения положения оси вращения несущего винта относительно фактического центра тяжести, а также необходимо расширить функциональные и летные характеристики вертолета за счет изменения, при необходимости, вертикального размера фюзеляжа с демпфированием при взлете вертолета или в полете и с возвратом в исходный вертикальный размер, также с демпфированием при посадке с целью изменения положения центра тяжести вертолета в вертикальном направлении, что повысит безопасность вертолета за счет изменения режимов его пилотирования особенно в аварийных ситуациях с несущим винтом и для парирования критических вертикальных инерционных нагрузок при посадке.
При решении вышеуказанных проблем, должна быть обеспечена модульность вертолета за счет применения быстросъемных элементов конструкции - модулей, что должно улучшить технологичность изготовления вертолета и его ремонтопригодность в различных условиях эксплуатации, а возможность взаимной вертикальной подвижности с демпфированием, верхней и нижней частей фюзеляжа вертолета, позволит совершать "мягкие" взлет и посадку.
Данная задача решается тем, что вертолет с изменяемой центровкой должен содержать фюзеляж, снабженный шасси, двигательную установку, связанную с несущим винтом, расположенным над фюзеляжем и смонтированным на опорном средстве, связанном с фюзеляжем, при этом несущий винт установлен на направляющем стакане, закрепленном на опорном средстве, смонтированном на фюзеляже с возможностью перемещения вместе с несущим винтом в продольном направлении относительно фюзеляжа посредством управляемого привода для изменения центровки вертолета, кроме того, на направляющем стакане установлен автомат перекоса несущего винта, а с задней стороны вертолета к опорному средству присоединено средство путевого управления, при этом верхняя часть фюзеляжа связана с упомянутым опорным средством, а на нижней части фюзеляжа установлены средства управления и эксплуатации вертолета.
Возможно, чтобы несущий винт имел две лопасти, а в качестве двигательной установки использовать центробежные реактивные детонационные двигатели (ЦРДД), установленные на концевых частях лопастей несущего винта.
Преимущественно в вертолете использовать автомат перекоса несущего винта с встроенным приводом управления циклическим шагом несущего винта.
Целесообразно опорное средство выполнить в виде полой хвостовой балки, на передней части которой посредством силового фитинга закрепить направляющий стакан, на котором посредством втулки установить несущий винт, лопасти которого своими осями в комлевых частях смонтировать в осевых шарнирах втулки несущего винта и связать посредством кронштейнов на осях лопастей, тягами с внешним кольцом автомата перекоса, а в нижней части силового фитинга должно быть поворотное устройство с ручкой для управления общим шагом несущего винта, связанное тягой с ползуном автомата перекоса, при этом для фиксации ручки в выбранном положении предусмотреть фиксирующие выемки на нижней части силового фитинга, а средство путевого управления присоединить к задней части хвостовой балки.
Целесообразно средство путевого управления выполнить в виде поворотного хвостового киля, укрепленного на полой несущей штанге, расположенной по его продольной оси, установленной посредством быстроразъемного соединения - байонетного замка в приводе поворота киля, смонтированного на задней части хвостовой балки.
Целесообразно фюзеляж выполнить в виде двух боковых вертикальных трубчатых силовых стоек, скрепленных верхними частями с силовой поперечной траверсой, а нижними частями с силовым основанием и силовой стенкой, при этом каждая из стоек должна состоять из двух, связанных между собой частей - нижней и верхней, первые из которых вместе с силовым основанием и силовой стенкой, а вторые с поперечной траверсой образуют соответственно нижнюю и верхнюю части фюзеляжа, причем верхние части стоек установить в нижних частях с возможной телескопической подвижностью и ограниченного перемещения упомянутых частей фюзеляжа относительно друг друга.
Целесообразно для ограничения перемещений верхней и нижней частей фюзеляжа вертолета на силовых стойках предусмотреть верхние и нижние упоры, а также ограничители в виде кольцевых выступов, при этом упоры выполнить на внутренней стороне нижних частей силовых стоек, а ограничители - на наружной стороне верхних частей стоек фюзеляжа, при этом ограничители расположить между указанными упорами, установленными соответственно крайним положениям частей фюзеляжа при их перемещении относительно друг друга, при этом между упорами и ограничителями разместить демпферы соответственно верхние и нижние в виде множества свободно размещенных упругих сферических элементов из силиконовой резины, смазанных сухой смазкой в виде графитового порошка, причем в ограничителях верхних частей стоек выполнить демпфирующие продольные перепускные отверстия и установить в них решетчатые дроссели.
В вертолете, для фиксации и расфиксации верхней части фюзеляжа в ее крайнем нижнем положении относительно нижней части фюзеляжа, на верхней части силовой стенки, нижней части фюзеляжа, закрепить центральную силовую стойку, расположив вертикально и симметрично между боковыми силовыми стойками фюзеляжа, верхний конец которой установить в гнезде в виде стакана, выполненном в силовой поперечной траверсе верхней части фюзеляжа, при этом стакан должен иметь фиксатор стойки в нем для скрепления верхней и нижней частей фюзеляжа и снабжен ручкой управления фиксатором.
Целесообразно, чтобы на поперечной силовой траверсе верхней части фюзеляжа был закреплен установочный узел, имеющий продольный относительно фюзеляжа канал, в котором установить съемную хвостовую балку с возможностью перемещения в нем с помощью управляемого привода, при этом привод кинематически связать с датчиком положения оси вращения несущего винта относительно фюзеляжа, а на силовом основании фюзеляжа закрепить два трубчатых передних пилона с установленными на их передних частях ручками управления вертолетом, а между пилонами к ним прикрепить сиденье пилота, выполненное в виде чаши под парашют, а силовая стенка нижней части фюзеляжа должна иметь мягкую эргономичную накладку со стороны сиденья пилота, образуя спинку сиденья, кроме того, на силовой стенке с задней стороны закрепить основной топливный бак и бак аварийного запаса топлива, а также блок коммутации и энергопитания систем управления и двигателей, кроме того, слева и справа от сиденья пилота установить полые пилоны для подвески полезной нагрузки и элементы в виде серег с проушиной для крепления ремней безопасности пилота.
В вертолете на правом от сиденья пилота пилоне установить ручку управления приводом управления циклическим шагом несущего винта, снабженную приборной панелью, а также ручки для управления приводом перемещения хвостовой балки, поочередной подачей топлива в двигатели для их поочередного запуска, а также ручку подачи топлива от основного топливного бака или от бака аварийного запаса топлива, а на левом пилоне установить ручку управления общим "газом" двигателей и приводом поворота хвостового киля - путевого управления, также снабженную приборной панелью, при этом в установочном узле этой ручки смонтировать датчик положения центра тяжести вертолета относительно оси вращения несущего винта, связанный с элементом визуального контроля фактического положения центра тяжести относительно оси вращения несущего винта, на приборной панели этой ручки, с этим же элементом визуального контроля связать датчик положения оси вращения несущего винта относительно фюзеляжа, при этом ручки управления приводами перемещения хвостовой балки, поворота хвостового киля и управления циклическим шагом несущего винта должны иметь задающие-управляющие элементы положения указанных приводов, с которыми они связаны.
Целесообразно в качестве датчика положения центра тяжести вертолета относительно оси вращения несущего винта использовать электронный гироскоп, выполненный на основе микроэлектромеханической системы (МЭМС) типа Epson XV-8000СВ, установленный в нулевое положение при совпадении по продольной оси вертолета положения центра тяжести вертолета с осью вращения несущего винта, а в качестве датчика положения оси вращения несущего винта относительно фюзеляжа использовать преобразователь угловых перемещений (энкодер) типа ЛИР-МА212А, установленный в нулевое положение при совпадении оси вращения несущего винта со своим исходным, конструктивным положением при изготовлении вертолета.
Целесообразно, чтобы ручка управления приводом управления циклическим шагом несущего винта и ручка управления общим "газом" двигателей и приводом поворота хвостового киля были снабжены подпружиненными фиксирующими скобами для фиксации ручек в выбранном положении при отсутствии контакта пилота с ними.
Целесообразно, чтобы на приборной панели ручки управления приводом управления циклическим шагом несущего винта имелись элементы управления средствами связи, осветительными, контурными, сигнальными приборами и полезной нагрузкой, а также элемент визуального контроля состояния бортового электропитания, а на приборной панели ручки управления приводом поворота хвостового киля и общим "газом" двигателей должны быть установлены элементы управления для поочередного запуска двигателей и визуального контроля числа оборотов несущего винта, а также визуального контроля уровня топлива в баках.
Целесообразно, чтобы приводы управления циклическим шагом несущего винта, поворотом хвостового киля и задающие-управляющие элементы на ручках управления этими приводами, а также связи между ними были выполнены гидравлическими, а привод управления перемещением хвостовой балки, задающий управляющий элемент на ручке управления этим приводом, а также связь между ними должны быть выполнены электрическими.
В вертолете шасси выполнить в виде двух опорных полозковых элементов, разнесенных друг от друга в поперечном направлении, каждый из которых двумя стойками связать с фюзеляжем вертолета, для чего на нем с нижней стороны, симметрично продольной оси вертолета, должны быть две базовые конические бобышки, а верхние концы каждой пары стоек закрепить в силовых фитингах, имеющих ответные, под бобышки, установочные конусные отверстия, при этом фитинги с фюзеляжем скрепить быстроразъемными соединениями, а стойки нижними концами прикрепить к опорным элементам шасси.
Техническим результатом, обеспеченным приведенной совокупностью признаков, является то, что, расширяя функциональные возможности вертолета и улучшая условия безопасного пилотирования, за счет возможности управлять центровкой вертолета при изменении центра тяжести и имея возможность "опускать" центр тяжести при взлете или в полете за счет новых свойств фюзеляжа вертолета, улучшаются условия пилотирования и маневренности, а также повышается безопасность полета, так как независимо от величины полезной нагрузки в пределах допустимых норм взлетной массы, изменения веса и положения полезной нагрузки во время полета пилот имеет возможность изменить центровку для удержания центра тяжести вертолета в оптимальном положении относительно оси вращения несущего винта, а путевое управление, управление центровкой за счет изменения положения оси вращения несущего винта и управление циклическим шагом несущего винта осуществляются приводами без использования жестких тяг, качалок и жесткой привязки ручек управления, фюзеляжа, несущего винта и путевого управления между собой.
К тому же продольное изменение положения оси вращения несущего винта относительно фюзеляжа и относительно центра тяжести вертолета позволяет пилоту выбирать оптимальный режим наклона и обдува машины в горизонтальном полете и при посадке, при этом наличие упругих демпферов между нижней и верхней частями вертолета в полете значительно снижает уровень передаваемой вибрации от несущего винта, действующей на экипаж, находящийся в нижней части фюзеляжа вертолета.
А возможность "опускать" вниз центр тяжести вертолета улучшает его устойчивость и безопасность, создавая условия для возникновения эффекта "полета семени клена", когда при утрате части лопасти ось вращения несущего винта и, соответственно, вертолет переходят в воронкообразное движение с "низким" центром тяжести в нижней части этой воронки, что исключает катастрофически быстрое разрушение всего вертолета, гибель экипажа из-за возникновения жестких поперечных колебаний фюзеляжа с большой амплитудой, что даст возможность экипажу спасти свою жизнь - совершить посадку или покинуть вертолет на парашюте.
Модульность - быстросъемные основные элементы конструкции вертолета, упрощает технологию его изготовления и позволяет рационально и мобильно упаковывать его или несколько аналогичных вертолетов для (десантирования) переброски любым транспортом, например для спасательно-поисковых работ, а также облегчает ремонт в полевых условиях путем замены модулей вертолета, а возможная взаимная подвижность с демпфированием верхней и нижней частей фюзеляжа позволит совершать "мягкие" взлет и посадку.
Сущность предлагаемого вертолета поясняется чертежами, на которых изображено:
а Фиг. 1 - общий вид вертолета, вид спереди, где показан фюзеляж вертолета с его верхней и нижней частями, несущий винт, ось вращения несущего винта вертолета и его втулка, шасси, сиденье пилота, силовая поперечная траверса, боковые силовые стойки и вертикальная силовая стойка фюзеляжа, датчик положения центра тяжести относительно оси вращения несущего винта.
На Фиг. 2 - вид А согласно Фиг. 1, где показан вертолет, вид сверху, лопасти несущего винта, сиденье пилота, передние пилоны с ручками управления, подножка пилота, оси и кронштейны в комлевых частях лопастей, полозья шасси, силовая поперечная траверса фюзеляжа, управляемый киль и внешний гибкий переход коммуникаций.
На Фиг. 3 - вид Б согласно Фиг. 1, где показан вертолет, вид сбоку, хвостовая балка с силовым фитингом и с направляющим стаканом, автомат перекоса с внешним кольцом 39, втулка несущего винта, хвостовой управляемый киль со своей штангой, узел установки и перемещения хвостовой балки, верхняя и нижняя части фюзеляжа, нижняя часть фюзеляжа с силовым основанием, топливные баки и передние пилоны с ручками управления вертолетом.
На Фиг. 4 - вынос I согласно Фиг. 3, где показан узел установки и перемещения хвостовой балки и привод для ее перемещения, датчик положения несущего винта и его оси вращения относительно фюзеляжа, а также центральная силовая стойка, взаимодействующая с верхней частью фюзеляжа, где в его силовой траверсе для этого выполнено гнездо в виде стакана с фиксатором стойки в нем и ручка управления фиксатором, а также показаны коммуникации в полости конструкции.
На Фиг. 5 - вынос II согласно Фиг. 3, где показаны ограничители, упоры, упругие и пневматические демпферы взаимодействия взаимно-подвижных трубчатых силовых стоек нижней части фюзеляжа с верхней частью фюзеляжа и коммуникации в полости конструкции.
На Фиг. 6 - вынос III согласно Фиг. 1, где показана связь тяги, устройства управления общим шагом с ползуном автомата перекоса на направляющем стакане и показаны привод и исполнительные элементы привода управления циклическим шагом несущего винта.
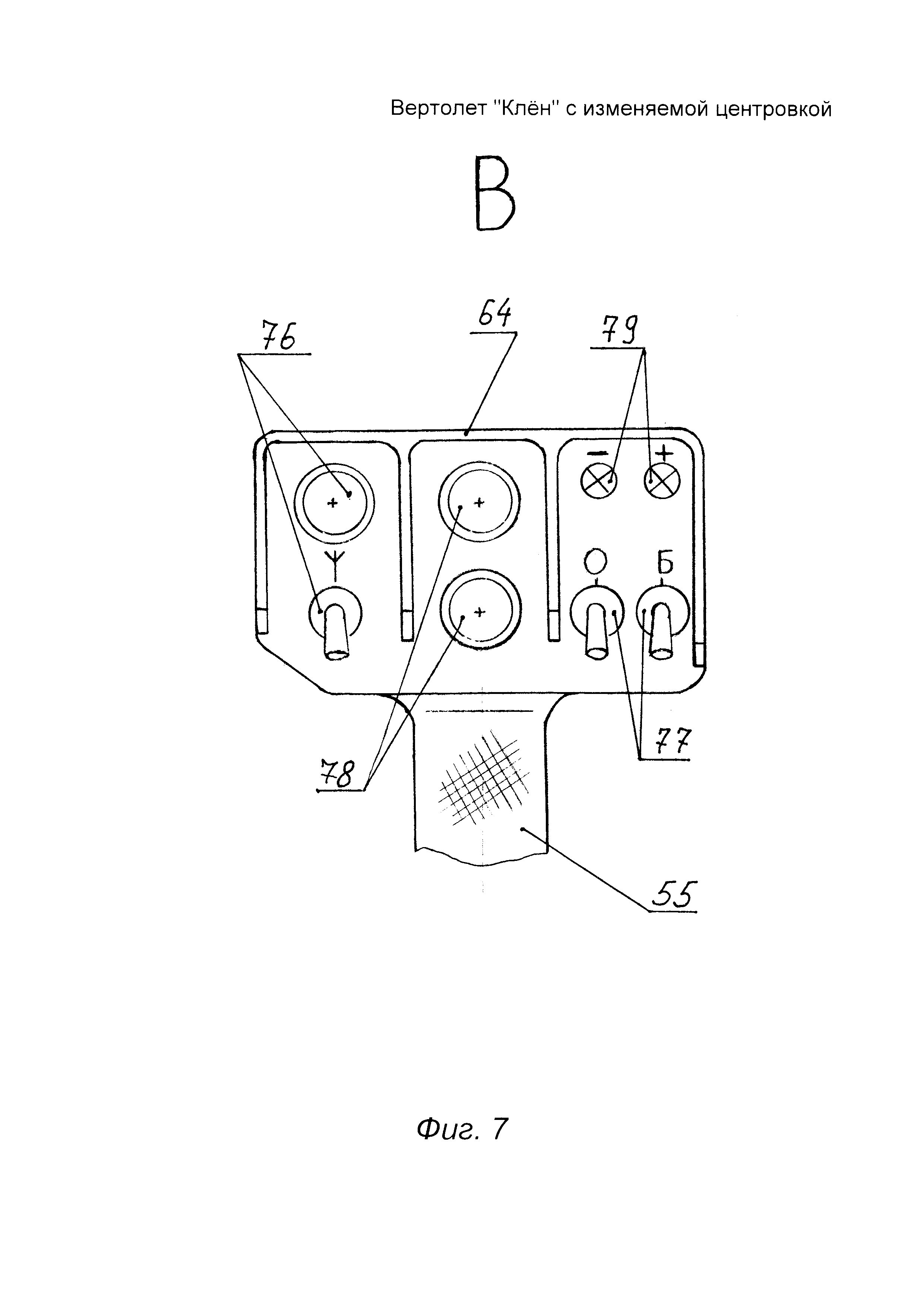
На Фиг. 7 - вид В согласно Фиг. 2, где показаны элементы управления и визуального контроля на приборной панели правой ручки управления.
На Фиг. 8 - вид Г согласно Фиг. 2, где показаны элементы управления и визуального контроля на приборной панели левой ручки управления, включая элемент визуального контроля положения центра тяжести относительно оси вращения несущего винта вертолета и положения оси вращения несущего винта относительно фюзеляжа, а также элементы контроля величины оборотов несущего винта и уровня топлива в баках 59, 60, а также элементы поочередного запуска двигателей 23.
На Фиг. 9 - фотография: "Вертолет с изменяемой центровкой".
Предлагаемый вертолет включает в себя:
базовый конструктивный элемент - фюзеляж 1 вертолета, содержащий (Фиг. 1, 2, 3, 5) силовое основание 2 и включающий две силовые несущие части - нижнюю 3, включающую силовое основание 2, и верхнюю 4, которые связаны между собой с возможностью ограниченного перемещения в вертикальном направлении относительно друг друга, при этом фюзеляж 1 имеет две боковые вертикальные трубчатые силовые стойки 5, которые скреплены своими верхними частями с силовой поперечной траверсой 6, а нижними частями с силовым основанием 2 (Фиг. 3) и силовой стенкой 7, при этом каждая из стоек 5 (Фиг. 1, 3, 5) состоит из двух, связанных между собой частей - нижней 8 и верхней 9, первые из которых вместе с силовым основанием 2 и силовой стенкой 7, а вторые с поперечной траверсой 6 образуют соответственно нижнюю 3 и верхнюю 4 части фюзеляжа 1, причем верхние части 9 (Фиг. 1, 5) стоек 5 установлены телескопически и с возможной ограниченной вертикальной подвижностью в нижних частях 8 этих стоек.
Для ограничения возможных взаимных перемещений (Фиг. 1, 3, 5) верхней 4 и нижней 3 частей фюзеляжа 1 вертолета на силовых стойках 5 предусмотрены (Фиг. 5) упоры верхние 10 и нижние 11 и ограничители 12 в виде кольцевых выступов, при этом упоры 10, 11 выполнены на внутренней стороне нижних частей 8 силовых стоек 5, а ограничители 12 - на наружной стороне верхних частей 9 стоек 5 фюзеляжа 1, при этом ограничители 12 расположены между указанными упорами 10, 11, установленными соответственно крайним положениям частей 3, 4 фюзеляжа 1 при их возможном перемещении относительно друг друга, при этом между указанными упорами 10, 11 и ограничителями 12 размещены демпферы соответственно верхние 13 и нижние 14 в виде множества свободно размещенных упругих сферических элементов 15 диаметром 8-15 мм, изготовленных из резины на основе силиконового каучука, например марки ИРП-1341 ("Машиностроительные материалы". Справочник. М.В. Раскатов. Москва, "Машиностроение", 1980 г., стр. 276), смазанных сухой смазкой, например в виде графитового порошка марки ГС-1 (ГОСТ 8295-85), и расположенных между упорами 10, 11 и ограничителями 12 в силовых стойках 5, причем в ограничителях 12 выполнены демпфирующие продольные перепускные отверстия 16 с установленными в них решетчатыми дросселями 17 (решетчатые дроссели 17 также применены для исключения перекрытия отверстий 16 сферическими элементами 15).
Для фиксации и расфиксации верхней части 4 фюзеляжа 1 (Фиг. 1, 3, 4) в ее крайнем нижнем положении относительно его нижней части 3 фюзеляжа, на верхней части силовой стенки 7, нижней части 3 фюзеляжа, закреплена центральная силовая стойка 18, расположенная вертикально и симметрично между боковыми силовыми стойками 5 фюзеляжа, верхний конец которой установлен в гнезде в виде стакана 19, выполненном в поперечной силовой траверсе 6 верхней части 4 фюзеляжа, при этом стакан 19 имеет фиксатор 20 стойки 18 в стакане 19 для скрепления верхней 4 и нижней 3 частей фюзеляжа, а фиксатор 20 снабжен ручкой 21 для управления им.
Вертолет также содержит (фиг. 1, 2, 3, 9) шасси 22, двигательную установку в виде двух центробежных реактивных детонационных двигателей (ЦРДД) 23, выполненных в соответствии с патентом ПМ RU №159772 от 23.06.2015 г., связанных с несущим винтом 24, который расположен над фюзеляжем и смонтирован на опорном средстве в виде хвостовой балки 25, связанной с фюзеляжем 1.
При этом несущий винт 24 (Фиг. 1, 3, 6) установлен на направляющем стакане 26, закрепленном на опорном средстве в виде хвостовой балки 25, смонтированной на фюзеляже с возможностью перемещения вместе с винтом 24 в продольном направлении относительно фюзеляжа, посредством управляемого привода 27 (Фиг. 3, 4), кроме того, на направляющем стакане 26 (Фиг. 1, 3, 6) установлен автомат перекоса 28 несущего винта 24, а с задней стороны вертолета к хвостовой балке 25 присоединено средство путевого управления в виде поворотного киля 29.
Верхняя часть 4 фюзеляжа связана с упомянутым опорным средством в виде хвостовой балки 25, а несущий винт 24 имеет две лопасти 30, на концевых частях которых установлены двигатели ЦРДД 23, при этом автомат перекоса 28 ("Краб"), использованный в вертолете, выполнен в соответствии с патентом ПМ RU №163712 от 25.12.2015 г., имеет встроенный привод 31 с исполнительными элементами 32 для дистанционного управления циклическим шагом несущего винта 24.
Хвостовая балка 25 имеет на передней части (Фиг. 1, 2, 3, 6) силовой фитинг 33, на котором закреплен упомянутый направляющий стакан 26, на котором посредством втулки 34 установлен несущий винт 24, лопасти 30 которого своими осями 35 в комлевых частях смонтированы в осевых шарнирах 36 втулки 34 несущего винта 24 и связаны тягами 37 посредством кронштейнов 38 на осях 35 с внешним кольцом 39 автомата перекоса 28, при этом внешнее кольцо 39 и втулка 34 несущего винта 24 связаны синхронизирующим шлиц-шарниром 40 (Фиг. 3), а для исключения дисбаланса при вращении внешнего кольца 39 и втулки 34 - напротив мест крепления на них шлиц-шарнира 40, установлены балансиры 41 в виде цилиндрических грузиков.
В нижней части силового фитинга 33 имеется (Фиг. 1, 3, 6) поворотное устройство 42 с ручкой 43 для управления общим шагом несущего винта 24, связанное тягой 44 с ползуном 45 автомата перекоса 28, при этом ползун 45 с возможностью линейного перемещения вдоль направляющего стакана 26 через свою наружную сферическую поверхность C1 связан с кольцом управления 46 автомата перекоса 28, при этом кольцо управления 46 своей нижней частью взаимодействует с исполнительными элементами 32 встроенного привода 31, состоящего из нескольких аналогичных и равнорасположенных относительно оси вращения 72 несущего винта 24 элементов (не менее трех), смонтированных на нижней части ползуна 45, а наружной стороной кольцо управления 46, через подвижную кинематическую связь С2, связано с внешним кольцом 39 автомата перекоса 28, а для фиксации (Фиг. 1, 3) ручки 43 в выбранном положении предусмотрены фиксирующие выемки 47 на нижней части силового фитинга 33 хвостовой балки 25.
При этом (Фиг. 2, 3) средство путевого управления - поворотный киль 29 - закреплено на полой несущей штанге 48, расположенной на его продольной оси и установленной посредством быстроразъемного соединения - байонетного замка 49 - в приводе 50 поворота киля 29, смонтированного на задней части хвостовой балки 25.
На поперечной силовой траверсе 6 (Фиг. 2, 3, 4) верхней части 4 фюзеляжа смонтирован установочный узел 51 и жестко прикреплен 52 к ней, установочный узел 51 имеет продольный относительно фюзеляжа канал 53, в котором установлена съемная хвостовая балка 25 с возможностью продольного перемещения в канале 53 с помощью привода 27, смонтированного на установочном узле 51, при этом привод 27 кинематически связан с датчиком 27A положения оси вращения несущего винта 24 и соответственно хвостовой балки 25, на которой смонтирован несущий винт, относительно фюзеляжа 1, а в качестве датчика 27А положения оси вращения несущего винта 24 и, соответственно, хвостовой балки 25 относительно фюзеляжа 1 использован преобразователь угловых перемещений (энкодер) типа ЛИР-МА212А (соответствует ГОСТ ISO 9001:2011 (ISO 9001:2008), Сертификат соответствия № РОСС RU.ГA45.К00091 от 04.02.2015), (Производство ОАО "СКБ ИС", 195009, Санкт-Петербург, Кондратьевский пр-т, д. 2, литер А), установленный в нулевое положение при совпадении оси вращения 72 несущего винта 24 с его исходным конструктивным положением при изготовлении вертолета или при очередном контроле его веса (ГОСТ Р 54580-2011).
На силовом основании 2 (Фиг. 1, 2, 3) фюзеляжа 1 вертолета закреплены два трубчатых передних пилона 54 с установленными на их передних частях ручками 55, 56 управления вертолетом, а между пилонами 54 к ним прикреплено сиденье 57 пилота, выполненное в виде чаши под парашют, например типа С-4Б ("Инструкция экипажу вертолета Ми-24В", А. Бежевцев, п.п. 1.3.4; 5.36; 5.36.1; 5.36.4, издание третье - в двух книгах, Книга 1 - Летная эксплуатация, Москва, Военное издательство, 1987 г.), а силовая стенка 7 нижней части 3 фюзеляжа имеет мягкую эргономичную накладку 58 со стороны сиденья 57 (Фиг. 1, 3), образуя спинку этого сиденья, а на силовой стенке 7 с задней стороны закреплены основной топливный бак 59 и бак 60 аварийного запаса топлива, а также блок 61 коммуникации и энергопитания систем управления (не показано) и двигателей 23, кроме того, слева и справа от сиденья 57 пилота установлены полые пилоны 62 для подвески полезной нагрузки, а также установлены элементы в виде серег с проушиной 63 для крепления ремней безопасности пилота.
На правом от сиденья 57 (Фиг. 1, 2, 3, 7) пилота пилоне 54 установлена правая ручка 55 управления приводом 31 управления циклическим шагом несущего винта 24, при этом ручка 55 снабжена приборной панелью 64, а также на правом пилоне 54 имеется ручка 65 для управления приводом 27 перемещения хвостовой балки 25 и еще ручка 66 поочередной подачи топлива в двигатели 23 для их поочередного запуска, а также ручка 67 переключения подачи топлива от основного топливного бака 59 или от бака 60 аварийного запаса топлива.
На левом от сиденья 57 пилоне 54 установлена (Фиг. 1, 2, 3, 8) левая ручка 56 (Фиг. 1, 2, 8) управления общим "газом" двигателей 23 и приводом 50 поворота киля 29 - путевого управления, при этом левая ручка 56 снабжена приборной панелью 68, а в установочном узле 69 ручки 56 смонтирован датчик 70 горизонтального положения центра тяжести 71 (Фиг. 1, 3, 6, 8) вертолета относительно оси вращения 72 несущего винта 24 (воображаемая точка на пересечении оси вращения 72 несущего винта 24 с плоскостью его вращения), при этом датчик 70 связан (связь не показана) с элементом 73 (Фиг. 1, 8) визуального контроля фактического положения центра тяжести 71 относительно оси вращения 72 на приборной панели 68 этой ручки, а в качестве датчика 70 (Фиг. 1) использован электронный гироскоп, выполненный на основе микроэлектромеханической системы (МЭМС) типа Epson XV-8000СВ (соответствует ISO/TS16949., ISO 14001., Производство "Seiko Epson Corporation", http://www.epssontoyokom.co.jp, Описание использования: ЗАО "Предприятие Остек", Информационный бюллетень №3 (100), апрель 2013, стр. 20-22, Матвей Резников), установленный в "нулевое" положение, при совпадении центра тяжести 71 с осью вращения 72 "нормально" - расчетно-загруженного вертолета в режиме висения, когда условная вертикальная ось датчика-гироскопа 70 параллельна вертикальной оси, проходящей через центр тяжести 71 и ось вращения 72 несущего винта 24, при этом (Фиг. 1, 3, 6, 8) на элементе 73, визуального контроля положения центра тяжести 71 относительно оси вращения 72, отображается индикаторная метка 73А датчика 70, в виде вертикального штриха, в центральной части индикаторной метки 73Г датчика 27А в виде биштриха - двух вертикальных параллельных штрихов, которые находятся в средней части (Фиг. 8) элемента 73, где имеется постоянная метка 73Д нормального (заводского) положения оси вращения несущего винта относительно фюзеляжа, на элементе 73 также имеется биштрих 73Б сектора допустимой передней (положительной) центровки (продольное смещение центра тяжести 71 вперед по отношению к оси вращения 72) и биштрих 73В сектора допустимой задней (отрицательной) центровки (продольное смещение центра тяжести 71 назад по отношению к оси вращения 72).
При эксплуатации вертолета пилот по взаимному положению (Фиг. 1, 3, 4, 8) индикаторной метки 73А и индикаторной метки 73Г относительно друг друга и постоянной метки 73Д нормального (заводского) положения оси вращения 72 на элементе визуального контроля 73 определяет и использует в пилотировании степень отклонения положения центра тяжести 71 от положения оси вращения 72 несущего винта 24 и, соответственно, наклон, на который реагирует датчик 70, продольной оси вертолета в сторону передней или в сторону задней центровки (ГОСТ Р 54580-2011, ."Требования и процедуры по контролю массы воздушного судна в процессе эксплуатации, п.п. 3.1.15; 3.1.17 и др.), а при изменении центровки вертолета из-за недопустимого смещения центра тяжести 71 относительно оси вращения 72 несущего винта 24, пилот сместит приводом 27 ось вращения 72 несущего винта 24, смонтированного на хвостовой балке 25, наблюдая смещение оси вращения 72 на элементе 73 визуального контроля, когда индикаторный биштрих 73Г датчика 27А будет смещаться от постоянной метки 73Д в сторону индикаторного штриха 73А датчика 70, восстанавливая допустимую или оптимальную центровку и, соответственно, допустимый или оптимальный наклон продольной оси вертолета.
При этом (Фиг. 1, 2, 3, 7, 8) ручка 65 управления приводом 27 перемещения хвостовой балки 25, ручка 56 управления приводом 50 поворота киля 29, ручка 55 управления приводом 31 управления циклическим шагом несущего винта 24 имеют задающие-управляющие элементы (не показаны) положения указанных приводов, с которыми они связаны (связи не показаны).
К тому же (Фиг. 1, 2, 3) ручка 55 управления приводом 31 управления циклическим шагом несущего винта 24, а также ручка 56 управления общим "газом" двигателей 23 и приводом 50 поворота киля 29 снабжены подпружиненными (не показано) фиксирующими скобами 74 правой ручки 55 и 75 левой ручки 56 для фиксации указанных ручек в выбранном положении при отсутствии контакта пилота с ними, а на приборной панели 64 (Фиг. 7) правой ручки 55 управления имеются элементы 76 управления средствами связи, элементы 77 управления сигнальными, контурными и осветительными приборами, элементы 78 управления полезной нагрузкой, а также элементы 79 визуального контроля состояния бортового электропитания.
На приборной панели 68 (Фиг. 1, 2, 8) левой ручки 56 управления, помимо элемента 73 визуального контроля центровки вертолета - положения центра тяжести 71 относительно оси вращения 72 несущего винта 24, установлены элементы 80 управления поочередным запуском двигателей 23, а также элемент 81 визуального контроля величины оборотов несущего винта 24, а также элементы 82 визуального контроля уровня топлива в основном топливном баке 59 и баке 60 аварийного запаса топлива.
При этом привод 31 управления (Фиг. 1, 2, 3, 6) циклическим шагом несущего винта 24 и привод 50 поворота киля 29 и задающие-управляющие (не показаны) элементы на ручках 55, 56 управления этими приводами, а также связи (не показаны) между ними выполнены гидравлическими (не показано), а привод 27 управления перемещением хвостовой балки 25, задающий-управляющий (не показано) элемент на ручке 65 управления приводом 27, а также связи (не показано) между ними выполнены электрическими (не показано).
Шасси 22 (Фиг. 1, 2, 3) вертолета выполнено в виде двух опорных полозковых элементов 83, разнесенных друг от друга в поперечном направлении, каждый из которых двумя стойками 84 связан с фюзеляжем, для чего на нем, фюзеляже, с нижней стороны имеются симметрично продольной оси вертолета две базовые конические бобышки 85, а верхние концы каждой пары стоек 84 закреплены в силовых фитингах 86, имеющих ответные, под бобышки 85, установочные конусные отверстия 87, при этом фитинги 86 с фюзеляжем 1 скреплены быстроразъемным соединением 88, а стойки 84 нижними концами прикреплены 89 к опорным элементам 83 шасси.
В представленном варианте (Фиг. 1, 2, 3, 5) осуществления предлагаемого вертолета возможна установка на передней части фюзеляжа съемной обшивки - обтекателя 90 (показано условно), а автомат перекоса 28 имеет защитный эластичный кожух 91 между внешним кольцом 39 и втулкой 34, при этом также защитным (Фиг. 1, 3, 5) эластичным кожухом 92 защищен стык между верхними 9 и нижними 8 частями боковых вертикальных силовых стоек 5. К тому же вертолет имеет бортовые, контурные и осветительные приборы 93 (Фиг. 1, 2, 3), а его гидравлические, электрические и другие коммуникации 94 (показаны условно) проложены в полых элементах (Фиг. 4, 5, 6) конструкции вертолета, а между подвижными или съемными элементами конструкции коммуникации 94 проложены в гибких внешних переходах 95 (Фиг. 2), при этом при эксплуатации вертолета положение центра тяжести 71 может меняться в вертикальном направлении 96 (Фиг. 1, 3), а положение оси вращения 72 несущего винта 24 относительно фюзеляжа 1, может меняться в горизонтальном направлении 97 (Фиг. 3), а нижние торцы верхних частей 9 силовых стоек 5, не должны выходить за пределы положения 98 (Фиг. 5) относительно нижних упоров 11 в нижних частях 8 стоек 5.
К тому же на передних пилонах 54 (Фиг. 1, 2, 3) установлены, в их средних нижних частях, на осях качания с винтовыми зажимами 99 штанги 100 с установленной на них подножкой 101 пилота с фиксацией ее в выбранном положении на штангах 100 винтовыми зажимами 102.
Работа заявленного вертолета показана при его использовании в различных режимах эксплуатации.
Вертолет к использованию готовится в следующей последовательности (Фиг. 1, 3, 4, 6, 8).
Проверить положение оси вращения 72 несущего винта 24 относительно фюзеляжа 1 (Фиг. 1, 2, 8), на элементе 73 визуального контроля, на приборной панели 68 левой ручки 56 управления - индикаторная метка датчика 27А, положения оси вращения 72 относительно фюзеляжа, в виде биштриха 73Г должна находиться на одной вертикальной оси с постоянной меткой 73Д исходного (заводского) положения оси вращения 72 относительно фюзеляжа 1. В случае несовпадении меток 73Г и 73Д, ручкой управления 65, на правом пилоне 54, управляя приводом 27, продольно изменить положение хвостовой балки 25 относительно фюзеляжа 1, а т.к. на хвостовой балке 25 смонтирован несущий винт 24 с осью вращения 72, то привод 27 фактически меняет положение оси вращения 72 относительно фюзеляжа 1. Пилот, меняя положение оси вращения 72 и наблюдая на элементе 73 визуального контроля за положением индикаторной метки 73Г по отношению к постоянной метке 73Д, совмещает их.
Установить (Фиг. 3, 6) общий шаг несущего винта 24 в нулевое угловое положение его лопастей 30 ручкой управления 43 устройства 42 управления общим шагом несущего винта 24, установив ее, ручку 43, в среднее положение, т.е. вдоль продольной оси вертолета, что будет соответствовать нулевому общему шагу лопастей 30 несущего винта 24, в последующем поворот ручки 43 вправо или влево будет соответствовать положительному или отрицательному общему шагу несущего винта, т.к. устройство 42 связано с автоматом перекоса 28 тягой 44 через ползун 45 и при повороте устройства 42 ручкой 43 вправо или влево автомат перекоса 28 с приводом 31, смонтированным на ползуне 45 со сферической наружной поверхностью С1, на которой подвижно установлено кольцо управления 46, имеющего подвижную кинематическую связь С2 с внешним кольцом 39 автомата перекоса, поднимается вверх или вниз по направляющему стакану 26, а тяги 37 (Фиг. 1, 3), связанные с внешним кольцом 39, взаимодействуя с кронштейнами 38 на осях 35 лопастей 30, одновременно изменяют наклон всех лопастей 30 на один и тот же угол общего шага несущего винта 24. При этом каждая фиксирующая выемка 47 для фиксации положения ручки 43 на нижней части силового фитинга 33 соответствует определенному градусу угла наклона лопастей 30 общего шага несущего винта 24.
В зависимости от веса экипажа и его экипировки, а также веса топлива и полезной нагрузки на пилонах 62, и в случае смещения, при невозможности расположить груз по другому, расчетного центра тяжести 71 от допустимых пределов передней или задней центровки (допустимое продольное смещение центра тяжести 71 вперед или назад относительно оси вращения 72 несущего винта) ручкой 65, наклоняя ее вперед или назад (Фиг. 3, 4), управляя приводом 27, смещается с исходного продольного положения хвостовая балка 25 и, соответственно, ось вращения 72, несущего винта 24, смещая с исходного (заводского) положения относительно фюзеляжа, и устанавливается предварительное расчетное положение оси вращения 72 относительно смещенного центра тяжести 71, при этом, при изменении положения оси вращения 72 несущего винта 24, привод 27 перемещает хвостовую балку 25 в канале 53 установочного узла 51, прикрепленного 52 к силовой поперечной траверсе 6 верхней части 4 фюзеляжа 1, а метка 73Г в виде биштриха, на элементе 73 визуального контроля, перемещается с исходного положения в сектор 73Б или сектор 73В передней или задней центровки (ГОСТ Р 54580-2011) на необходимую расчетную величину, что отражается на элементе 73 визуального контроля, а в дальнейшем пилот, при необходимости, будет устанавливать предварительную оптимальную центровку по расчетам или "Центровочным таблицам" (Пример: Вертолет Ми-8АМТ, "Руководство по загрузке и центровке", П.М. Прокопенко, стр. 3-43, Изд. 5/216875р-П96, ГУАП, 1996 г. - предельная передняя (положительная) центровка: +300 мм (центр тяжести впереди оси вращения несущего винта), предельная задняя (отрицательная) центровка: -95 мм (центр тяжести позади оси вращения несущего винта)). Значения предельных передней и задней центровок зависят от типоразмера вертолета и его взлетной массы.
Правой ручкой управления 55 (Фиг. 1, 3, 6, 7), управления приводом 31, управления циклическим шагом несущего винта 24, расфиксируя ее, ручку 55, нажимом на скобу 74, установить в исходное горизонтальное положение внешнее кольцо 39 автомата перекоса 28, для этого ручку управления 55 установить в исходное центральное положение ее круговой азимутной подвижности, а так как привод 31, в виде нескольких аналогичных элементов (не менее трех), равнорасположенных вокруг оси вращения 72 несущего винта, смонтирован на нижней части ползуна 45 автомата перекоса 28, а его исполнительные элементы 32, синхронно, в соответствии с положением ручки 55, поднимаются или опускаются, взаимодействуют с нижней частью кольца управления 46, которое, наклоняясь на сферической поверхности С1 ползуна 45, наклоняет внешним кольцо 39, с которым кинематически С2 подвижно связано кольцо управления 46. Внешнее кольцо 39 принимает исходное горизонтальное положение в соответствии с исходным положением ручки 55.
Установить степень поворота на своей оси хвостового киля 29 - путевого управления (Фиг. 1, 2, 3, 8), в исходное положение - парирования реактивного момента при вращении несущего винта 24 в предстоящем полете, при этом левой ручкой 56 управляется привод 50 поворота киля 29 на его продольной оси, отклоняя ее, ручку 56, с левого или с правого положения в центральное, исходное положение своего поперечного хода, при этом движение ручки 56 возможно при расфиксации ее нажимом на фиксирующую скобу 75, а величина поворота киля 29 будет, в последующем, соответствовать поперечному положению ручки 56 от центрального положению своего поперечного хода.
Скрепить верхнюю часть 4 (Фиг. 1, 4) с нижней частью 3 фюзеляжа, с возможностью ограниченной телескопической подвижностью, при этом части 4, 3 скрепить между собой центральной силовой стойкой 18, закрепленной на силовой стенке 7 нижней части 3 фюзеляжа 1 с фиксации ее, стойки, в стакане 19, выполненном в силовой поперечной траверсе 6 верхней части 4 фюзеляжа посредством фиксатора 20 с ручкой 21 его управления.
Убедиться, что центральная силовая стойка 18 (фиг. 1, 4) находится в исходном положении - зафиксирована в стакане 19 фиксатором 20, а ручка 21 управления фиксатором 20 находится в горизонтальном положении.
Поставить левую ручку управления 56 в положение общий малый «газ» двигателей 23, т.е. максимально передвинуть на себя, вдоль продольной оси вертолета, а при ее движении, в последующем, вперед, будет увеличение общего «газа» до максимального значения, при этом поперечное положение ручки 56 сохраняется и, соответственно, ею также будет осуществляться управление приводом 50 поворота киля 29 - путевое управление.
Ручкой управления 67 (Фиг. 3), отклоняя ее влево или вправо от вертикального положения, подключить к топливной системе (не показана) вертолета основной топливный бак 59 или бак 60 аварийного запаса топлива.
На этом подготовка к использованию вертолета завершается и производится запуск двигателей 23.
Ручкой управления 66 (Фиг. 2, 3, 8), отклоняя ее с правого крайнего положения в вертикальное положение, подключить подачу топлива в первый двигатель 23 на одной из лопастей 30 несущего винта 24, а на приборной панели 68 (Фиг. 8) включить зажигание элементом управления 80 в первом двигателе 23. После запуска первого двигателя 23 и достижения вращения несущего винта 24 до 10-25 об/мин ручкой управления 66 подключить подачу топлива, поставив ручку в левое крайнее положение, в следующий двигатель 23 на другой лопасти 30 несущего винта 24, включив зажигание во втором двигателе 23 элементом управления 80, ручка управления 56 отклоняется от себя, увеличивается общий "газ" в двигателях 23 до достижения 50-100 об/мин несущего винта 24.
После запуска двигателей 23 управление ими осуществляется ручкой 56 путем перемещения ее от положения «малый газ» максимально к себе до положения «максимальной газ» ручка максимально от себя.
Режим взлета, горизонтальный полет и посадка вертолета
Поставить ручкой 43 необходимый взлетный общий шаг (Фиг. 1, 3, 6) несущего винта 24 путем поворота ручки 43 в «положительное» правое направление своего вращения с фиксацией ее в соответствующих фиксирующих выемках 47, при этом автомат перекоса 28 вместе с ползуном 45, кольцом управления 46, внешним кольцом 39 и приводом 31 поднимутся на необходимую величину по направляющему стакану 26 и через тяги 37, соединенные с внешним кольцом 39 автомата перекоса 28, и кронштейны 38 на осях 35 лопастей 30 установят их, лопасти, на соответствующий "положительный" угол наклона лопастей 30 выбранного общего шага несущего винта 24.
Если выбран режим "мягкого" взлета, расфиксировать стойку 18 в стакане 19 (Фиг. 1, 4), опустив вниз ручку 21 управления фиксатором 20.
Добавляя общий «газ» в двигатели 23, отклоняя ручку 56 от себя, увеличиваем обороты несущего винта 24, контролируя величину оборотов на элементе 81 (Фиг. 1, 5, 8) визуального контроля величины оборотов на приборной панели 68 ручки управления 56 и после достижения определенных оборотов и увеличения необходимых тяговых характеристик несущего винта 24 он, винт, за счет подъемной силы начнет поднимать верхнюю часть 4 фюзеляжа 1 вертолета вместе с верхними частями 9 силовых стоек 5 (Фиг. 5), находящихся телескопически в нижних 8 частях силовых стоек 5 нижней части 3 фюзеляжа.
Верхняя часть 4 фюзеляжа (Фиг. 1, 3, 5) поднимается с демпфированием за счет того, что в нижних частях 8 стоек 5 установлены кольцевые упоры, верхние 10 и нижние 11, а их расположение по высоте соответствует возможному максимально верхнему или максимально нижнему положению верхней части 4 фюзеляжа 1 по отношению к его нижней части 3, а на верхних частях 9 силовых стоек 5 установлены ограничители 12, которые находятся между упорами 10, 11 и контактируют с этими упорами через упругие, нижние 14 и верхние 13 демпферы.
Когда полозковые элементы 83 шасси 22 вертолета находятся еще на опорной поверхности (земле), то ограничители 12 упираются в упоры 11, сжимая свободно размещенные упругие сферические элементы 15 демпферов 14, а в начале подъема верхней части 4 фюзеляжа вместе с ограничителями 12 на верхних 9 частях стоек 5 усилие на демпферы 14 уменьшается и их сферические упругие элементы 15 возвращаются в исходные сферические формы и в свободное состояние размещения, увеличиваясь в своем объеме. Продолжая двигаться вверх, ограничители 12 сжимают воздух, находящийся между ними и верхними упорами 10, вытесняя его, воздух, через демпфирующие перепускные отверстия 16 и решетчатые дроссели 17 в пространство под ограничителями 12, тем самым пневматически демпфируется движение вверх части 4 фюзеляжа по отношению к его нижней части 3, в это же время свободно размещенные упругие сферические элементы 15 верхних демпферов 13 поднимаются вместе с ограничителями 12 до упоров 10 и при соприкосновении с ними они активно перемещаются относительно друг друга, достигая общей плотности и деформируясь в зависимости от усилия их сжатия, чем замедляется, до остановки, вертикальный ход верхней части 4 фюзеляжа 1, при этом сферические упругие элементы 15 демпферов 13, 14 смазаны сухой смазкой типа графитового порошка для обеспечения их качественной самоориентации при сжатии и возврата их в свободное исходное состояние при отсутствии сжатия.
После подъема и остановки верхней части 4 фюзеляжа 1 до максимально верхнего положения нижний край верхних 9 частей силовых стоек 5 должен находиться в положении 98 (Фиг. 5), не выходя из контакта с боковыми внутренними поверхностями кольцевых упоров 11 в нижних частях 8 стоек 5.
Пилот, контролируя величину оборотов (Фиг. 1, 2, 3, 7, 8) несущего винта 24 на элементе 81 визуального контроля на приборной панели 68 (Фиг. 1, 2, 8), принимает окончательное решение на взлет, увеличивая общей «газ» двигателей 23, отклоняя ручку 56 от себя - взлетает.
В режиме висения окончательно устанавливается и контролируется положение центра тяжести 71 относительно оси вращения 72 несущего винта 24.
Ручкой (Фиг. 1, 3, 8) управления 65, при необходимости, корректируется положение оси вращения 72 несущего винта 24 вертолета приводом 27, устанавливая ее, ось 72, в оптимальное положение по отношению к фактическому центру тяжести 71 вертолета, контролируя это отношение по положению индикаторной метки 73А, в виде вертикального штриха датчика 70 на элементе 73 визуального контроля, по отношению к индикаторной метке 73Г, в виде биштриха, два вертикальных и параллельных штриха датчика 27А, положения оси вращения 72 по отношению к фюзеляжу 1, а также контролируется, на элементе 73 визуального контроля, положение индикаторной метки 73А относительно биштриха 73Б - допустимой передней центровки (положительной), или биштриха 73В - допустимой задней центровки (отрицательной), выбирая действия для оптимизации положения центра тяжести 71 по отношению к оси вращения 72 несущего винта.
Оптимальное (Фиг. 8) положение центровки вертолета, наблюдаемое на элементе 73 визуального контроля - индикаторная метка, вертикальный штрих 73А находится между штрихами биштриха индикаторной метки 73Г, и в этом случае продольная ось вертолета будет горизонтальной, а датчик-гироскоп 70 своей индикаторной меткой 73А на элементе контроля 73 будет показывать полное совпадение с индикаторной меткой 73Г и, соответственно, "нулевой" наклон продольной оси вертолета, а диапазон рабочего хода управления циклическим шагом несущего винта 24 ручкой 55 будет полным - не надо тратить рабочий ход и диапазон управления циклическим шагом на выравнивание вертолета, как при смещении центра тяжести 71 по отношению к оси вращения 72.
При коррекции оси вращения 72 относительно фактического центра тяжести 71 ручкой управления 65 пилот включает привод 27 (Фиг. 1, 3, 4), который перемещает хвостовую балку 25 в канале 53 установочного узла 51, а смещение оси вращения 72 несущего винта относительно фюзеляжа возможно по направлению 97 в любую сторону вдоль продольной оси вертолета.
После установки и коррекции положения центра тяжести 71 к оси вращения 72 несущего винта 24 путем продольного смещения оси вращения 72, в режиме висения, пилот выбирает (Фиг. 1, 3, 7, 8) направление полета. Приводом 50, поворачивая плоскость киля 29, от исходного положения - парирования реактивного момента несущего винта 24 ручкой 56, перемещая ее, ручку, влево или вправо от центрального положения поперечного хода, изменяя степень взаимодействия плоскости киля 29 с индуктивным потоком воздуха от вращения несущего винта 24, тем самым осуществляя путевое управление - поворачивая весь вертолет относительно его вертикальной оси и после окончания выбора направления, ручку управления 56 возвращают в исходное центральное положение своего поперечного хода и привод 50 поворачивает плоскость киля 29 в положение парирования реактивного момента несущего винта 24, а в предстоящем горизонтальном полете пилот будет управлять килем 29, находящимся в индуктивном потоке воздуха с учетом того, что в горизонтальном полете на киль 29 также будут действовать встречные и "спутные" потоки воздуха, а также при изменении направления полета и активном маневрировании.
Для перехода к горизонтальному полету правой ручкой управления 55 (Фиг. 1, 3, 7) приводится в действие привод 31 (Фиг. 3, 6) управления циклическим шагом несущего винта 24 путем необходимого наклона ее, ручки 55, в сторону выбранного движения, что будет соответствовать наклону внешнего кольца 39 автомата перекоса 28 за счет соответствующего изменения положения исполнительных элементов 32 привода 31 и наклона на сферической поверхности С1, кольца управления 46, с нижней частью которого взаимодействуют исполнительные элементы 32 привода 31, смонтированного в нижней части ползуна 45, а т.к. внешнее кольцо 39 кинематически подвижно связано С2 с кольцом управления 46, оно, внешнее кольцо 39, с тягами 37, связанными с лопастями 30 через кронштейны 38 на осях 35 лопастей 30, также наклонится и, соответственно, изменится циклический шаг лопастей 30 на каждый оборот несущего винта 24, а наклон внешнего кольца 39 будет пропорционален наклону ручки управления 55 с круговой азимутной подвижностью от ее исходного центрального положения, тем самым изменится вектор тяги (подъемной силы) несущего винта 24 за счет циклического изменения углов атаки (наклона) лопастей 30, осуществляя горизонтальный полет вертолета в необходимом направлении.
При использовании полезной нагрузки в процессе полета (Фиг. 1, 2, 3, 4, 7, 8), закрепленной на боковых пилонах 62, а также в случае ее утраты или при использовании большей части топлива в баках 59, 60 или "катастрофической" утраты части конструкции фюзеляжа 1 пилот, контролируя изменение положения центра тяжести 71 относительно оси вращения 72 несущего винта на элементе 73 визуального контроля - ручкой 65, управляя приводом 27, перемещает хвостовую балку 25 с осью вращения 72 несущего винта 24 и хвостовым килем 29 в необходимом направлении 97 вдоль продольной оси вертолета восстанавливает или устанавливает оптимальное положение оси вращения 72 по отношению к изменившемуся центру тяжести 71, тем самым сохраняя условия пилотирования, которые были после взлета, в режиме висения, или те, которые оптимальны для конкретного случая пилотирования, при этом (Фиг. 5) наличие упругих демпферов 13 между верхней 4 и нижней 3 частями фюзеляжа 1 вертолета снижает уровень вибрации, действующей на пилота от вращающегося несущего винта 24.
А для (Фиг. 3, 6) полета и посадки в режиме авторотации, когда по какой-то причине двигатели 23 отключены, необходимо ручкой 43 управления общим шагом несущего винта, путем поворота в левую сторону, установить необходимый «отрицательный» угол наклона лопастей 30 общего шага несущего винта 24, при этом пилотирование, когда несущий винт 24 вращается за счет потоков воздуха при снижении с планированием или от восходящих потоков воздуха, а также посадка будут аналогичны полету с работающими двигателями, только перед касанием шасси 22 земли пилот производит динамическое маневрирование - "горку", путем поворота вправо ручки 43 и установления необходимого «положительного» угла наклона лопастей 30 общего шага несущего винта 24, при этом за счет инерции вращения несущего винта 24 создается кратковременная подъемная сила, что уменьшит вертикальную скорость посадки, при этом наличие демпферов между нижней 3 и верхней 4 частями фюзеляжа исключит жесткий характер посадки, т.к. верхняя часть 4 фюзеляжа 1 с несущим винтом 24 и двигателями 23 не «придавит» нижнюю часть 3 с экипажем, а плавно опустится за счет упругих и пневматических демпферов (Фиг. 5) 14, 16, 17 между частями фюзеляжа до упора ограничителей 12 в упоры 11 через демпферы 14.
При штатной "мягкой" посадке вертолета с работающими двигателями 23, пилот уменьшает тяговую характеристику несущего винта 24 путем уменьшения общего «газа» двигателей 23 ручкой управления 56 (Фиг. 2, 3, 5, 6, 7, 8) и изменяет в меньшую сторону значение общего шага несущего винта 24 ручкой управления 43, вертолет касается опорными элементами 83 шасси 22 поверхности земли, имея определенную вертикальную скорость, но при этом верхняя часть 4 фюзеляжа 1 прекращает вертикальное движение вниз, т.к. масса нижней части 3 фюзеляжа 1 "исключается" из общей массы вертолета и верхняя часть 4 продолжает "висеть" за счет еще достаточной, большей, чем вес верхней части 4 вертолета, подъемной силы несущего винта 24, не «придавливая» нижнюю часть 3 фюзеляжа 1 своей массой и силой вертикальной инерции.
При дальнейшем уменьшении пилотом тяговых характеристик несущего винта 24 верхняя часть 4 плавно опустится до упора ограничителей 12 в упоры 11 через упругие демпферы 14 и после выдавливания воздуха, находящегося между упорами 11 и ограничителями 12, через перепускные отверстия 16 и решетчатые дроссели 17.
Если пилот считает, что вертикальное смещение 96 центра тяжести 71 в предстоящем полете не понадобится, то в этом случае перед взлетом в полете и при посадке силовая стойка 18 (Фиг. 1, 3, 4), закрепленная на силовой стенке 7 нижней части 3 фюзеляжа 1, остается зафиксированной в верхней части 4 фюзеляжа 1 в стакане 19 фиксатором 20, и ручка его управления 21 остается в горизонтальном положении, скрепляя обе части 4 и 3 фюзеляжа. При этом пилот имеет возможность, по своему усмотрению или исходя из условий пилотирования, находясь в полете, «опустить» центр тяжести 71, расфиксировав стойку 18 в стакане 19, опустив ручку 21 вниз, освободив фиксатор 20 стойки 18, при этом нижняя часть 3 фюзеляжа 1 опустится с демпфированием до упора упоров 10 в ограничители 12, при этом центр тяжести 71 вертолета сместится по направлению 96 - вниз, а это особенно необходимо при аварийной утрате части лопасти 30 или двигателя 23 во время полета, т.к. при низком центре тяжести 71 возникший дисбаланс несущего винта 24 не приведет к катастрофически быстрому разрушению вертолета и гибели пилота, из-за жестких поперечных колебаний фюзеляжа вертолет перейдет, в этом случае, в воронкообразное движение наподобие полета "кленового семени", когда ось вращения несущего винта 24 будет описывать верхний диаметр воронки, а "низкий" центр тяжести 71 будет нижней частью воронки, что даст возможность пилоту совершить аварийную посадку или покинуть вертолет на парашюте пилота типа С-4Б, который всегда находится с пилотом в сиденье-чаше 57.
При возникновении аварийных ситуаций - повреждения в полевых условиях автомата перекоса 28 и невозможности управлять циклическим и общим шагом несущего винта 24.
Конструкция предложенного вертолета позволяет (Фиг. 1, 3, 7, 8) в этом случае автомат перекоса 28 или только лопасти 30 любым способом жестко фиксировать относительно втулки 34 в положении необходимого положительного общего шага несущего винта 24, при этом взлет выполняется управлением левой ручки 56 с продольным и поперечным рабочим ходом управления общим «газом» двигателей 23 и приводом 50 путевого управления, путем поворота киля 29 и управления общим "газом" двигателей 23, а горизонтальный полет в этом случае осуществляется за счет изменения положения оси вращения 72 несущего винта 24 в направлении 97 (в направлении передней центровки) по отношению к центру тяжести 71, за счет продольного смещения оси вращения 72 несущего винта 24, смонтированного на хвостовой балке 25 приводом 27 управляемого ручкой управления 65 на правом переднем пилоне 54, чем наклоняется вперед продольная ось вертолета и изменяется плоскость вращения несущего винта 24, меняя вектор тяги, а посадка в этом случае будет осуществляться уменьшением ручкой 56 общего "газа" двигателей (двигателя) 23 с одновременным изменением положения оси вращения 72 относительно центра тяжести 71 ручкой 65 для оптимизации скорости горизонтального и вертикального полета во время посадки.
Практическая применимость предложенной полезной модели, вертолет с изменяемой центровкой, проверена путем исследований, проектирования и изготовления отдельных элементов, макетов вертолета для стендовой и практической отработки базовых параметров технического решения.
Вертолет спроектирован и выполнен со всеми силовыми элементами, обеспечивающими силовые и динамические нагрузки при использовании его в различных режимах. Вертолет изготовлен с отношением массы "сухого" вертолета к массе полезной нагрузки 1:3 (см. Фиг. 9) и с изменяемой (управляемой) центровкой вертолета.
В процессе стандартной отработки концептуального вертолета были подтверждены заявленные характеристики по повышению маневренности, упрощению конструкции по сравнению с известными образцами вертолетов при простоте изменения центровки вертолета и хорошей «отзывчивости» вертолета на эти изменения во время полета. Подтверждена также повышенная живучесть машины при аварийной ситуации с лопастями несущего винта, при реальной возможности спастись пилоту на парашюте или совершить посадку, при этом упростился процесс обучения пилота, т.к. пилот, устанавливая ось вращения несущего винта вертолета всегда в оптимальное положение по отношению к центру тяжести, пилотирует его, вертолет, исходя из его аэродинамических и физических свойств, а не по «ощущениям». А новые характеристики фюзеляжа - управляемая взаимная подвижность верхней и нижней частей фюзеляжа с демпфированием этой подвижности, придает новые свойства в возможности изменять центр тяжести вертолета в вертикальном направлении, при этом у пилота вертолета имеется возможность самому решать, когда и при каких обстоятельствах использовать свойство управляемой взаимной подвижности частей фюзеляжа, т.к. имеется управляемый фиксатор (расфиксатор) этих частей.
При этом конструктивное свойство вертолета осуществлять "мягкие" взлет и посадку облегчает пилотирование, делая его более безопасным и с большим лимитом времени на принятие правильных решений в сложных ситуациях реального полета.
Поэтому вертолет с управляемой центровкой и с изменяемым положением оси вращения несущего винта относительно фюзеляжа и фактического положения центра тяжести, а также вертикального изменения центра тяжести, может найти применение при создании новых вертолетов и в практическом вертолетостроении, когда требуется повысить управляемость и безопасность пилотирования вертолета, при этом, также за счет улучшения технологичности конструкции предложенного вертолета, обеспечена модульность конструкции машины.
Источники информации
FR 2493267, 10.07.1981 (прототип); RU 2539612 C2, 23.04.2013; US 5454015 A, 19.09.1995;
RU 2278059 C1, 24.12.2004; RU 2186000 C1, 24.08.2001;
RU 2196704 C1, 24.12.2001; US 4498648 A, 12.02.1985; RU 2268841 C2, 18.03.2004; RU 84340. 23.01.2009.
RU 21767 U1, 30.07.2001;
RU 41356, 15.02.1933, "Парашют "Кленовое семя"; RU 2191139 C1, 24.12.2001; RU 2364550, 20.03.2007;
Статья: "Кленовый вертолет", Екатерина Люльчак, "РБК daily" 27.10.2009.
Статья: "О полете семени клена", журнал "Наука" от 12.06.2009, выпуск 324, стр. 1438-1440.
"Инструкция экипажу вертолета Ми-24В", А. Бежевцев, издание третье - в двух книгах, Книга 1 - "Летная эксплуатация", п.п. 1.3.4; 5.36; 5.36.1; 5.36.4; Москва, "Военное издательство", 1987 г.
Вертолет Ми-8АМТ, "Руководство по загрузке и центровке", П.М. Прокопенко, стр. 3-43, Изд. №5/216875р-П 96, ГУАП, 1996 г.
"Микроэлектромеханические системы" (МЭМС), Учебное пособие, Министерство образование и науки РФ, Петрозаводский Государственный Университет, Гуртов В.А., Беляев М.А. и др., Петрозаводск, Издательство "ПетрГУ", 2016 г., стр. 11-72.
ГОСТ Р 54580-2011, "Требования и процедуры по контролю массы воздушного судна в процессе эксплуатации".
ОАО "СКБ ИС, Санкт-Петербург, "Информационный бюллетень" №3 (100), апрель 2013, стр. 20-22, "Использование и испытание МЭМС-гироскопов", Матвей Резников.
Ежемесячный специализированный журнал, "Станочный парк", №4 (70), 2010, С.Е. Ефимов, "Использование датчиков углового перемещения - энкодеров", ЛИР-МА212А соответствующих ГОСТ 15.207-2005 и ISO 9001:2008.
Реферат
Полезная модель, Вертолет "Клен" с изменяемой центровкой, относится к авиационной технике, в частности к вертолетам высокой маневренности и повышенной безопасности для экипажа, и может быть использована при создании новых конструкций вертолетов для различных областей хозяйственной деятельности и в военных целях, включая использование при создании беспилотных вертолетов.Вертолет является модульным и имеет фюзеляж, двигательную установку, выполненную в виде детонационных двигателей ЦРДД, автомат перекоса ("Краб") с встроенным приводом управления циклическим шагом и несущий винт, расположенный над фюзеляжем, смонтированный с возможностью продольного перемещения относительно фюзеляжа для изменения центровки вертолета, а достигается продольная подвижность несущего винта вертолета тем, что он смонтирован на подвижной хвостовой балке, которая находится в продольном канале установочного узла, закрепленного на верхней силовой части фюзеляжа.К тому же вертолет "Клен" имеет взаимно-подвижные верхнюю и нижнюю части фюзеляжа, с фиксацией в одно целое и расфиксацией этих частей пилотом, что позволило получить новые свойства вертолета - «опускать» центр тяжести вертолета вниз перед взлетом или в полете для "мягких" влета и посадки, менять конфигурацию положения вертолета в полете, особенно при аварийной ситуации с несущим винтом, когда при утрате части лопасти верхняя часть фюзеляжа с несущим винтом относительно "низкого" центра тяжести переходит в воронкообразное движение с эффектом "полета семени клена", снижая жесткие поперечные колебания и давая возможность пилоту совершить аварийную посадку или покинуть машину на парашюте -
Комментарии