Летательный аппарат - RU2235045C1
Код документа: RU2235045C1
Чертежи



Описание
Изобретение относится к авиационной технике, в частности к конструкции летательных аппаратов (самолетов, планеров и летающих моделей самолетов) с безаэродромиой посадкой.
Если не учитывать самолеты с вертикальным взлетом и посадкой, которые имеют массу общеизвестных недостатков (в том числе непригодность к коммерческому использованию), все остальные известные летательные аппараты с безаэродромной посадкой можно разделить на две группы.
Одну группу летательных аппаратов с безаэродромной посадкой составляет группа пилотируемых самолетов, для посадки которых применяются тросовые устройства (здесь под тросом понимается любая гибкая связь, выполненная из троса, каната, цепи и пр., многократно выдерживающая цикл: изгиб с углом между ветвями петли до 0° и радиусом изгиба, равным удвоенному диаметру троса, а затем выпрямление места изгиба до угла 180°).
Так, в системе посадки (RU №1837038, кл.В 64 F1/02, 30.08. 90) используется пилотируемый самолет, у которого в носовой части фюзеляжа установлен захват с замком, а на посадочной площадке на высоте, превышающей длину летательного аппарата (ЛА), натянут трос между штоками, перемещающимися в цилиндрах двух воздушно-гидравлических амортизаторов, каждый из которых установлен на двухстепенном карданном подвесе на своем стреловом кране, управляемом гидроцилиндрами. В режиме посадки ЛА осуществляется автоматическая стабилизация положения и натяжения троса.
Для осуществления посадки ЛА переводят на закритические углы атаки, обеспечивающие с помощью тяги двигателей почти вертикальное положение ЛА. Затем снижают посадочную скорость и высоту полета ЛА. При подлете ЛА к месту посадки носовую часть обтекателя фюзеляжа раскрывают, выдвигая вперед тормозной крюк в виде траверсы, на конце которой установлен захват с кулачковым замком. Половинки раскрытого обтекателя образуют своеобразный зев (ловушку), в глубине которого установлен захват. Ловушка направлена в сторону полета (почти горизонтального). При достижении скорости посадки относительно троса, близкой к нулю, и при наведении ЛА ловушкой на трос, захват зацеплятся за трос запирая последний замком.
Затем под действием инерции и веса ЛА трос принимает петлеобразную форму, а система трос-ЛА становится физическим маятником, раскачивание которого компенсируется амортизаторами, гидроцилиндрами причального устройства и подтягиванием троса.
Потом двигатели отключают, посадка ЛА на трос закончена.
ЛА оказывается подвешенным за носовую часть к тросу вниз хвостовым оперением. Затем с помощью стреловых кранов ЛА в подвешенном состоянии транспортируют и устанавливают на посадочную площадку вертикально (по ракетному) на хвостовое оперение.
ЛА при такой системе посадки требует:
а) - двигателей с суммарной тягой, превышающей вес ЛА, для совершения предпосадочного маневра - перехода с полета на докритических углах атаки на полет с закритическими углами атаки и удержания почти околовертикального полета - висения;
б) - сложной системы управления ЛА;
в) - добавочного топлива для выполнения сложного маневра посадки;
г) - пилота высочайшей квалификации;
д) - упрочнения хвостовой части фюзеляжа.
К недостаткам относится также неудобство посадки пилотов, связанное с вертикальным стояночным положением ЛА.
О практическом применении такой системы посадки не известно.
Большинство типов ЛА, в том числе авиамодели, планеры и беспилотные самолеты не отвечают этим требованиям, а поэтому непригодны для посадки описанным способом.
Но тросовое устройство посадки ЛА, примененное в этой системе, без каких-либо изменений пригодно к использованию для посадки перечисленных выше типов ЛА по предложенному изобретению.
Известна другая тросовая система (RU №2067951, кл.В 64 С 25/68, 20.10.96) с укороченной посадкой ЛА, которая широко применяется на авианосцах. На палубе авианосца в начале посадочной полосы натянуты улавливающие тросы стационарной части тормозного устройства, а каждый ЛА этой системы имеет бортовую часть тормозного устройства, включающего тормозной крюк (гак) с амортизатором поворота, приводом и системой управления.
Тормозной крюк, как правило, выполнен в виде круглого стержня, называемого штангой (силовой элемент), на выпушенном конце которой установлен захват (улавливаемый элемент), а противоположный конец штанги закреплен в хвостовой части фюзеляжа с возможностью поворота вокруг поперечной оси ЛА. (Исключением является конструкция тормозного крюка, в котором крепящий конец штанги выполнен в виде траверсы, два плеча которой крепятся соосно снаружи бортов хвостовой части фюзеляжа).
Перед заходом ЛА на посадку привод поворачивает крюк из убранного в выпущенное положение, в котором выпущенный конец тормозного крюка с захватом расположен ниже фюзеляжа ЛА так, что к моменту приземления крайняя траектория выпущенного конца тормозного крюка проходит ниже траектории любой точки ЛА.
При посадке ЛА на палубу тормозной крюк, зацепляется захватом за один из четырех тросов, натянутых поперек посадочной полосы со средним интервалом 12 м на высоте 0,10-0,12 м.
Амортизатор тормозного крюка демпфирует отклонения тормозного крюка. Каждый трос является улавливающим элементом аэрофинишерной машины (стационарной части тормозного устройства), включающей два барабана. Тормозящее действие аэрофинишерной машины заключается в том, что ЛА после зацепления за трос пробегает по палубе не более 90 м, вытягивая при этом с барабанов аэрофинишерной машины петлю троса.
После остановки ЛА трос отцепляется от захвата, медленно наматывается на барабаны аэрофинишерной машины и принимает исходное (натянутое между двумя опорными шкивами) положение, а тормозной крюк устанавливается приводом в убранное положение.
Недостатками ЛА, применяемого в этой системе, являются:
а) - необходимость пилота высокой квалификации, так как посадка ЛА проводится по наклонной траектории (угол тангажа -4°) на площадку размером 6×36 м с зацеплением захвата тормозного крюка за трос не ранее момента касания палубы основными стойками шасси. При раннем зацеплении летящий ЛА получает от тормозящего усилия троса сначала небольшой кабрирующий момент, переходящий через четверть секунды с момента зацепления в нарастающий пикирующий момент. Но главное, к этому времени ЛА от вертикальной составляющей тормозящей силы получает дополнительную скорость вертикального приземления до 0,7 м/с, а к 0,5 с с момента зацепления - до 2 м/с (на профессиональном жаргоне явление называется "хлыст"). Поэтому последующее приземление ЛА происходит с увеличенной вертикальной скоростью, особенно скоростью опускания передней стойки вплоть до ее поломки;
б) - увеличенная масса самолета, рассчитанного на торможение тросом (по сравнению с вариантом с традиционной аэродромной посадкой не менее чем на 15%), для повышения прочности центральных и хвостовых отсеков фюзеляжа, к которым крепятся основные опоры шасси и тормозной крюк, и для повышения прочности и высоты стоек шасси, чтобы выдержать приземление ЛА с вертикальной скоростью до 5 м/с;
в) - ненадежный режим зацепления, особенно при шторме, вызывающий большую вероятность ухода на повторную попытку посадки (для повышения вероятности зацепления параллельно задействовано несколько улавливающих тросов со своими аэрофинишерными машинами);
г) - высокая цена (в основном за счет отмеченных выше недостатков) ЛА, а также за счет наземного оборудования для посадки ЛА, в том числе корабля с посадочной палубой длиной не менее 120 м, а также высокая стоимость обучения пилота (до десяти миллионов долларов США по американским данным);
д) - ограниченность применения таких ЛА (целесообразно использовать для посадки военных ЛА и только на авианосцах).
Вторую группу летательных аппаратов беэаэродромной посадки составляют аппараты, оснащенные парашютами. Так, известен вариант ЛА (US №4311290, НПК 244/110 Р, МПК7 В 64 F 1/02, 19.01.82), выбираемый за прототип, в котором предусмотрено наличие на ЛА параплана (признак "бортовая часть тормозного устройства").
Для посадки на судно этого ЛА предусмотрена мачта с поворотной стрелой, оснащенной улавливающими крюками и дисковым тормозным устройством поворота стрелы (признак "стационарная часть тормозного устройства").
Параплан состоит из купола (признак "улавливаемый элемент") и из набора вант, объединенных в две стропы (признак "силовой элемент"). Купол выполнен из тканого или пленочного материала, сшитого так, что в выпущенном положении купол принимает форму крыла. Стропы расположены относительно базовой оси ЛА симметрично, места их крепления находятся либо на фюзеляже, либо на крыле (признак - силовой элемент, "связывающий улавливаемый элемент с аппаратом").
Для сохранения управляемого полета системы параплан - ЛА результирующая сила от купола параплана приложена в точке, находящейся обычно выше центра масс ЛА, а в продольном направлении - вблизи центра масс. Последний у ЛА, выполненного по нормальной аэродинамической схеме, не выходит из пределов средней аэродинамической хорды крыла (например, для самолета Як-40 предельные центровки составляют 13-32% САХ). При этом в зависимости от скорости ветра, от величины тяги и направления тяги двигателей и пр. может быть небольшое отклонение точки приложения результирующей силы от центра масс как вперед, так и назад (признаки "закрепленный на аппарате с возможностью поворота вокруг поперечной оси аппарата," и "которая расположена в продольном интервале средей аэродинамической хорды крыла").
Перед посадкой из ЛА выпускают параплан, купол которого под действием набегающего потока воздуха рывком раскрывается и принимает форму крыла, которое располагается выше ЛА (признак - улавливаемый элемент - "установленный с возможностью выдвижения выше идущего на посадку аппарата"). Систему ЛА - параплан направляют к месту посадки так, чтобы ЛА пролетел под стрелой мачты, а купол параплана - над стрелой. В результате купол зацепляется за улавливающие крюки стрелы, которая под действием инерции зацепившегося ЛА будет поворачиваться и наклоняться, расходуя кинетическую энергию ЛА на излом шпильки, поддерживавшей стрелу в исходном горизонтальном положении, и на преодоление силы торможения в дисковом тормозном устройстве при повороте стрелы вокруг мачты на четверть оборота. При этом сам ЛА получает тормозящий импульс, который приводит к раскачиванию ЛА.
После прекращения раскачивания посадка ЛА "на крюк" закончена. Конечное подвешенное положение ЛА будет близко к горизонтальному (некоторое отклонение по углу тангажа неизбежно вследствие изменений центровки ЛА и необходимости соблюдения требования управляемости системы ЛА - параплан на этапе подлета к посадочной мачте). Затем отключают тормоз и, управляя стрелой, ЛА опускают на посадочную площадку.
Преимуществами этого ЛА перед вторым аналогом являются:
а) - отсутствие эффекта "хлыста";
б) - снижение требований к квалификации пилота;
в) - снижение требований к прочностным свойствам ЛА;
г) - снижение стоимостных показателей (ЛА, корабля, обучения пилота).
Недостатками такого ЛА являются:
а) необходимость иметь на борту ЛА - параплан и обслуживающие его работу устройства и приспособления (это до 20% максимальной грузоподъемности и до 10% стоимости ЛА);
б) значительная вероятность нештатных ситуаций, связанных с парапланом (нераскрытие, складывание раскрытого параплана от порыва воздуха и т.п.);
в) неудобства послепосадочного обслуживания параплана.
Сведений о применении таких аппаратов нет, очевидно вследствие перечисленных выше недостатков
Целью настоящего изобретения является устранение указанных недостатков прототипа, а именно повышение грузоподъемности, снижение стоимости, повышение надежности посадки, а также решение общего недостатка всех перечисленных выше аналогов - расширение сферы применения ЛА с безаэродромной посадкой, в том числе для гражданских пассажирских самолетов.
Поставленная задача решается тем, что в летательном аппарате, содержащем фюзеляж, несущее крыло и бортовую часть тормозного устройства, включающую улавливаемый элемент, установленный с возможностью выдвижения выше идущего на посадку аппарата и предназначенный для зацепления за размещенный на месте посадки улавливающий элемент стационарной части тормозного устройства, а также включающую силовой элемент, связывающий улавливаемый элемент с аппаратом и закрепленный на аппарате с возможностью поворота вокруг поперечной оси аппарата, которая расположена в продольном интервале средней аэродинамической хорды крыла, согласно изобретению силовой и улавливаемый элементы представляют собой тормозной крюк с захватом.
ВЛА поперечная ось поворота тормозного крюка может быть расположена в центре масс идущего на посадку аппарата.
ВЛА поперечная ось поворота тормозного крюка может быть расположена выше и сзади центра масс аппарата.
ВЛА тормозной крюк может быть выполнен в виде двух стержней, симметрично расположенных относительно базовой оси аппарата, и перемычки, соединяющей концы стержней и содержащей захват с замком.
ВЛА тормозной крюк может быть установлен с возможностью поворота в убранное положение, в котором стержни прилегают к наружной поверхности фюзеляжа.
Сущность изобретения поясняется чертежами.
На фиг.1 схематически показан общий вид варианта ЛА (похожего на самолет "Ил-103") с тянущим винтом в носовой части фюзеляжа и тормозным крюком с силовым элементом, выполненным в виде двух стержней. ЛА изображен идущим на посадку (посадочный угол атаки 10°) в горизонтальном полете.
На фиг.2 схематически показан общий вид наиболее предпочтительного варианта ЛА (похожего на дистанционно пилотируемый ЛА "Пчела-1Т") с толкающим винтом в хвосту и тормозным крюком с силовым элементом выполненным в виде штанги. ЛА изображен идущим на посадку (посадочный угол атаки 0°) в горизонтальном полете.
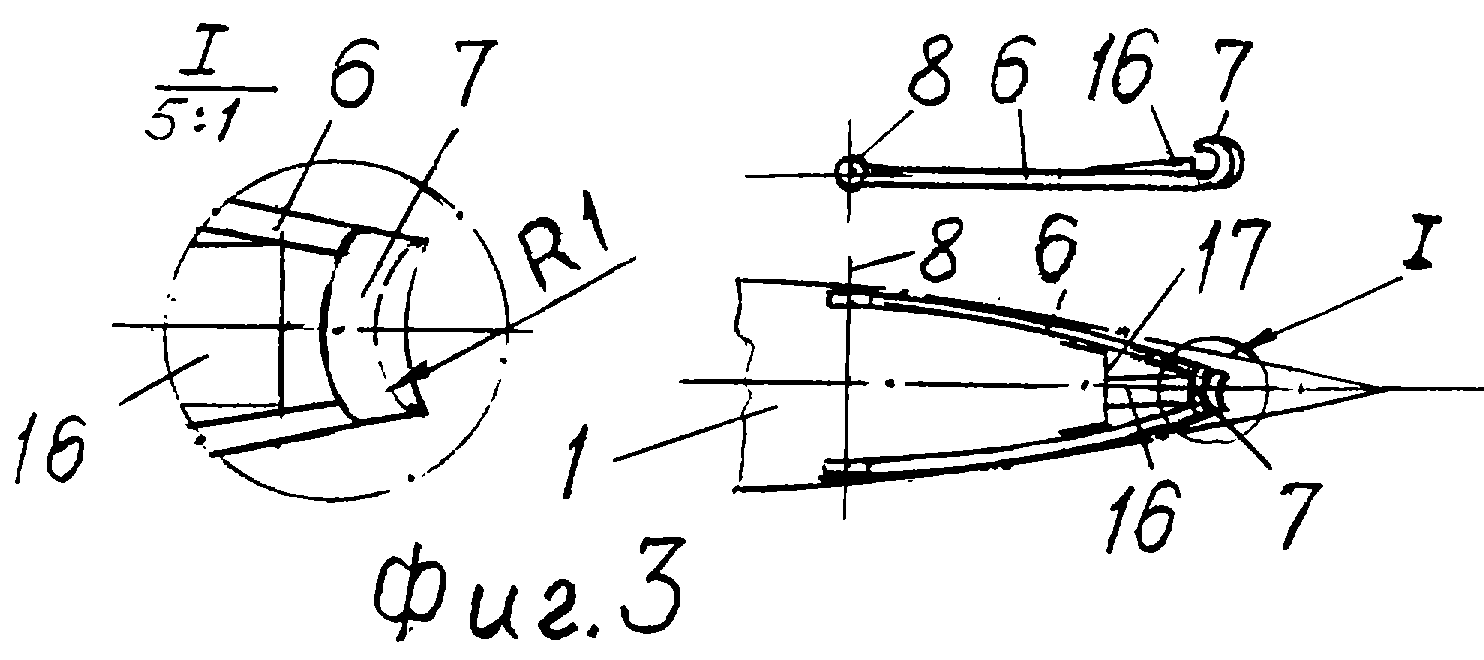
На фиг.3 показан предлагаемый тормозной крюк в двух проекциях (вид сверху дан на фоне контура ЛА в убранном положении тормозного крюка).
На фиг.4 показаны этапы посадки на трос дистанционно управляемого ЛА, изображенного на фиг.2, с использованием известного по первому аналогу тросового посадочно-тормозного устройства.
На фиг.5 приведены графики, иллюстрирующие преимущества предложенного изобретения.
Возможность осуществления изобретения следует из представленных ниже описаний летательных аппаратов.
ЛА (фиг.1) выполнен по нормальной аэродинамической схеме и имеет фюзеляж 1, несущее крыло 2, установленное в средней части фюзеляжа, горизонтальное оперение 3 и киль 4, установленные в хвостовой части фюзеляжа, тянущий винт 5, установленный в носовой части фюзеляжа, и бортовую часть тормозного устройства, включающую тормозной крюк 6 с захватом 7, изображенные на чертеже в выпущенном положении в средней части фюзеляжа. Привод и амортизатор крюка, а также двигатель винта на чертеже не показаны, чтобы не затенять существенные элементы ЛА, хотя при описании работы ЛА эти элементы будут упомянуты. (Для сравнения в хвостовой части фюзеляжа ниже горизонтального оперения 3 пунктиром показан тормозной крюк, характеризующий известный по второму аналогу уровень техники).
Тормозной крюк 6 установлен с возможностью поворота вокруг поперечной оси 8 (обозначена окружностью с точкой), которая расположена в продольном интервале средней аэродинамической хорды выше и позади центра масс 9 (обозначен окружностью с затененными секторами). Линия, проходящая через центр масс ЛА и точку пересечения оси 8 с базовой плоскостью ЛА (штрихдвухпунктирная) здесь называется линией равновесия 10. Продольный интервал, занимаемый САХ, выделен на фюзеляже двумя пунктирными линиями, проходящими в базовой плоскости (плоскости чертежа), перпендикулярными базовой оси 11.
В выпущенном положении тормозной крюк 6 установлен так, что захват 7 оказывается выше идущего на посадку ЛА. При этом траектория 12 верхней точки захвата 7 горизонтально идущего на посадку ЛА оказывается выше траектории 13 верхней точки ЛА (в данном случае это винт 5) и выше троса 14. В свою очередь винт 5 должен пройти ниже троса 14.
В убранном положении тормозной крюк 6 повернут вокруг оси 8 по часовой стрелке до прилегания к наружной поверхности фюзеляжа.
ЛА (фиг.2) также выполнен по нормальной аэродинамической схеме. В хвостовой части фюзеляжа 1 показан толкающий винт 5, расположенный в кольцевом оперении 15. В выпущенном положении при горизонтальном полете идущего на посадку ЛА траектория 12 верхней точки захвата 7 оказывается выше траектории 13 верхней точки ЛА - кольцевого оперения, а тем более выше траектории 13 верхней точки крыла 2. (На чертеже показаны также дуги траекторий поворота тормозных крюков из выпущенного положения в убранное, а также штрихпунктирными линиями показаны убранные положения тормозных крюков на фиг.1 и фиг.2).
Установка винта в кольцевом оперении наиболее благоприятна, потому что нет вероятности касании троса винтом, а кроме того, уменьшается длина тормозного крюка 6. Для этого варианта ЛА тормозной крюк выполнен по традиционной схеме с силовым элементом в виде штанги.
Тормозной крюк (фиг.3), например, для пассажирских ЛА (как на фиг.1) расположен снаружи фюзеляжа в отличие от тормозного крюка в первом аналоге. Крюк изображен в убранном положении, а вид сверху дан на фоне контура фюзеляжа ЛА по фиг.1.
Общим с первым аналогом является траверса, выполненная в виде двух стержней, представляющих собой силовой элемент крюка 6, и перемычки между выдвигаемыми концами стержней, содержащей захват 7 с замком. Причем внутренняя опорная поверхность захвата имеет известную по второму аналогу скругленную форму, изображенную пунктирной линией с радиусом R1, который для повышения долговечности троса 14 должен быть не меньше двух диаметров троса. Замок также может быть выполнен кулачкового типа, как в первом аналоге, но на чертеже показан пружинный стопор 16, консольно прикрепленный к тормозному крюку 6 при помощи перемычки 17, которая удерживает запирающий (свободный) конец стопора 16 в положении перекрытия входа в захват 7, не менее чем наполовину. Пружинящие свойства стопора 16 проявляются в том, что он пропускает трос в захват 7 и не дает тросу выйти из захвата.
Стационарная часть тормозного устройства (на фиг.4 показана в двух видах в пяти положениях) может быть полностью взята из первого аналога, в котором она названа причальным устройством. Это устройство (фиг.4а) состоит из двух одинаковых стреловых грузоподъемных кранов 18, расположенных симметрично на месте посадки на некотором расстоянии друг от друга, исключающем повреждение планера ЛА при посадке и последующей транспортировке на место стоянки или хранения, и соединенных между собой натянутым тросом 14. (Положения "б", "в", "г" и "д" на фиг.4 показывают схематическое изображение посадочного устройства в зависимости от воздействия на него зацепившегося ЛА).
Каждый грузоподъемный кран 18 состоит из выдвижной телескопической стрелы 19, установленной с помощью шарнирной опоры 20. Телескопическая стрела 19 через шарнир 21 связана со штоком гидроцилиндра 22. (Подобный цилиндр, отклоняющий стрелу 19 в перпендикулярном направлении, на чертеже не показан).
На конце верхней секции каждой стрелы 19 в двухстепенном карданном подвесе 23 установлены амортизаторы 24, например цилиндры масляно-воздушной амортизации со штоками 25. Выходные штоки 25 амортизаторов 24 направлены навстречу друг другу по оси троса 14, который крепится к этим штокам.
Описание работы устройства основано на эффекте прямого торможения идущего на посадку ЛА после его зацепления за улавливающий трос стационарной части тормозного устройства.
Если не учитывать сопротивление воздуха, то основные изменения в движении ЛА после его зацепления за трос сводятся к торможению полета до нулевой скорости по горизонтали (тормозной путь полета), к опусканию аппарата по вертикали и к повороту аппарата вокруг поперечной оси в результате действия силы торможения от стационарной части тормозного устройства (как по горизонтали, так и по вертикали) и силы тяжести.
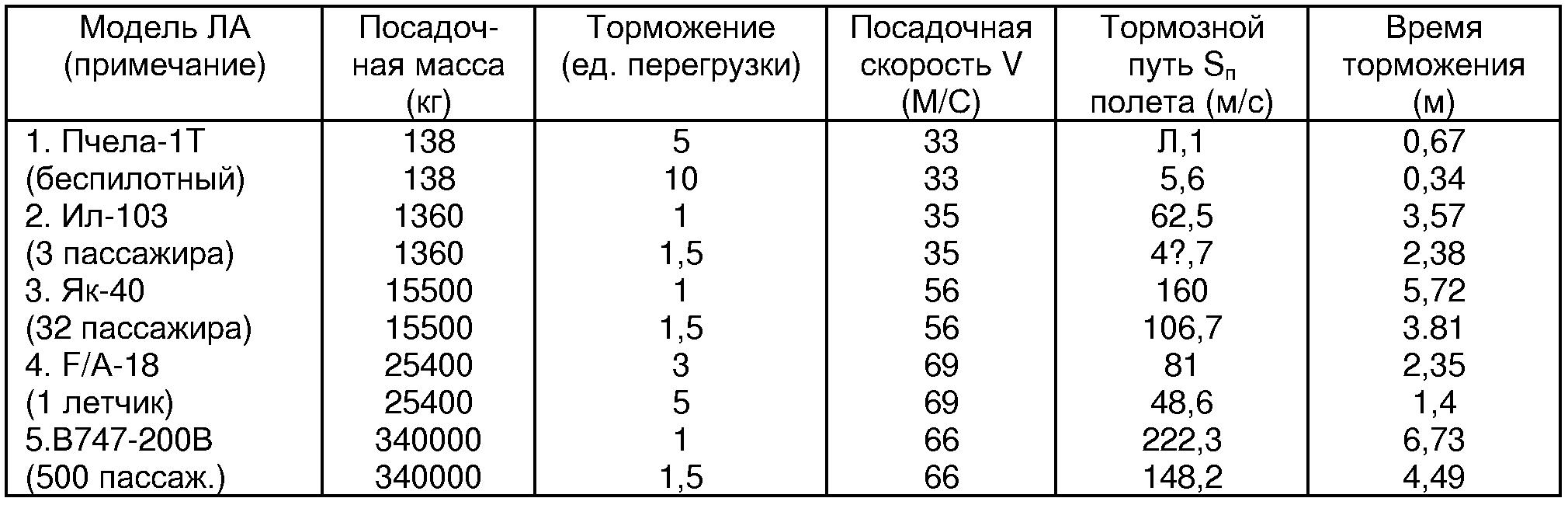
В таблице показаны расчетные зависимости тормозного пути полета и времени торможения этого полета различных типов ЛА в зависимости от перегрузки, возникающей при торможении летящего с посадочной (в данном случае), минимальной горизонтальной скоростью ЛА, начиная с момента зацепления ЛА, до остановки его горизонтального движения.
В этой таблице тормозной путь полета и время полета по горизонтали подсчитаны по формулам
Тормозной путь полета SП=V2/2a,
Время полета ТП=v/a,
где V- посадочная скорость (м/с);
а - замедление полета (м/с2) (или, разделив на 9,8 м/с2, получим замедление полета в единицах перегрузки).
Работа устройства (посадка ЛА на трос) начинается с подхода ЛА в зону посадки и разворота его в направлении посадки перпендикулярно натянутому на месте посадки улавливающему тросу 14 (фиг.4). Затем на ЛА выдвигают тормозной крюк 6 в положение "выпущено" (если последний не находится в постоянно выпущенном положении) и ведут ЛА по заданной глиссаде (фиг.4а), что в наиболее простом варианте означает горизонтальный прямолинейный полет с минимальной горизонтальной скоростью так, чтобы все аэродинамически значимые элементы, расположенные впереди тормозного крюка, прошли ниже троса, а тормозной крюк 6 своим захватом 7 зацепился за трос 14, натянутый в горизонтальной плоскости.
/Наиболее неприемлемый режим посадки: вероятность задевания какого-либо элемента ЛА (кроме тормозного крюка) за трос (для ЛА, изображенного на фиг.1 - это, в первую очередь, винт 5).
Для предотвращения таких аварийных ситуаций (похожих на возможность задевания тормозным крюком за корму судна во втором аналоге) необходимы или небольшая скорость подлета ЛА к тросу, чтобы пилот успел правильно направить ЛА, или наведение ЛА известными инструментальными методами (оптическими или радиоэлектронными) тормозным крюком на трос, или разработка перемещения троса по высоте натяжения, чтобы скорректировать ошибку наведения ЛА, или другие мероприятия для предотвращения аварий. К таким мероприятиям относятся применение ЛА с толкающим винтом, как на фиг.2, или два винта на уровне крыла, или реактивные двигатели в хвосте ЛА и пр./.
Итак, ЛА наиболее приемлемой конфигурации (с толкающим винтом, как на фиг.2) идет на посадку в горизонтальной плоскости (фиг.4а) по стрелке справа-налево и при этом на виде сбоку траектория 12 верхней точки захвата 7 оказывается выше троса 14 (который на виде сбоку находится в центре круговой проекции цилиндра амортизатора 24), а траектория 13 верхней точки крыла 2 ЛА оказывается ниже троса 14. На виде сверху траектория полета ЛА проходит примерно посередине длины троса 14 и перпендикулярно ему.
При таких условиях полета ЛА его тормозной крюк 6 налетает на трос 14 и, в результате взаимодействия троса и крюка, последний, отклоняясь назад, приближается к линии равновесия 10, скользит по тросу, который утапливает пружинный стопор 16 вниз, проскальзывает его и входит в захват 7. Пружинный стопор 16 восстанавливает свое исходное положение и препятствует выходу троса 14 из захвата 7. Колебания тормозного крюка 7 при зацеплении за трос демпфирует амортизатор тормозного крюка (как выше было указано этот амортизатор не показан на чертежах).
После зацепления за трос ЛА по инерции продолжает полет, который корректируется тормозящей силой от троса 14, закрепленного на штоках 25 воздушно-гидравлических амортизаторов 24. Под действием силы инерции ЛА двухстепенные карданные подвесы 23 обеспечивают поворот цилиндров амортизаторов 24 относительно двух взаимно перпендикулярных осей вращения: оси, совпадающей с продольной осью стрелы 19, и горизонтальной оси, перпендикулярной тросу. При этом трос 14 прогибается (фиг.4б), вызывает поворот цилиндров амортизаторов 24 и вытягивает из них штоки 25. Равнодействующая сил вытяжения штоков амортизаторов 24 представляет тормозящую силу, которая приложена через тормозной крюк 6 к ЛА.
В результате действия тормозящей силы скорость полета ЛА замедляется, причем из-за действующей вверх составляющей тормозящей силы ЛА на доли секунды поднимется вверх. При этом тормозной крюк 6 продолжает отклоняться назад относительно ЛА и переходит линию равновесия 10, после чего ЛА от тормозящей силы получает нарастающий кабрирующий момент, вызывающий поворот ЛА (фиг.4б и фиг.4в). Но при замедлении скорости полета ЛА, падает подъемная сила ЛА, в результате чего ЛА постепенно с нарастающей скоростью опускается вниз, а из-за вращения ЛА тормозной крюк 6 поворачивается вперед и обратно переходит линию равновесия 10, после чего ЛА от тормозящей силы получает пикирующий момент, который стремится вернуть ЛА в положение горизонтального полета. В случае расположения оси 8 в центре масс 9 (что достижимо в крайне редких случаях), ЛА практически не будет иметь поперечного момента и все его отклонения от прямолинейного горизонтального полета будут связаны с изменением вертикальной составляющей тормозящей силы.
Наконец скорость горизонтального полета ЛА замедляется до нуля (фиг.4в), а прогиб троса 14 достигает максимума (величина прогиба, спроецируемая на горизонтальную плоскость, равняется тормозному пути полета ЛА), так как массы ЛА недостаточно для вытягивания штоков 25 из амортизаторов 24. ЛА остается подвешенным на тросе под действием силы тяжести и превращается в физический маятник (фиг.4г), колебания которого демпфируются отклонением стрел 19 под действием гидроцилиндров 22 или управлением тяги двигателя, после чего двигатель отключают.
Затем ЛА можно опустить на посадочную площадку, синхронно поворачивая стрелы 19 вокруг опор 20. Другой вариант - это подъем ЛА до первоначальной высоты троса 14 при помощи возврата штоков 25 амортизаторов 24 в исходное положение (фиг.4д), а затем опускание ЛА по первому варианту. При этом наклон висящего на тросе ЛА зависит от отклонения линии равновесия 10 от вертикали.
Таким образом можно осуществлять посадку на трос ЛА, подобного ДПЛА "Пчела-1 Т" или легких моделей самолетов с посадочной скоростью 15-30 м/с, для которых тормозной путь полета (5,6 метра) одного порядка с вытягиваемой длиной штока 25 воздушно-гидравлического амортизатора 24 (1 метр). Для пассажирских самолетов с тормозным путем полета 40-65 метров подобное причальное устройство тоже можно использовать, но основным демпфирующим элементом в этом случае должен стать гидроцилиндр 22, у которого вытягивание штока на 2 метра при высоте подъема троса на 60 метров дает тормозной путь полета до 65 метров. Для самолетов с тормозным путем полета, превышающим 70 метров, целесообразно улавливающий трос 14 натягивать с помощью аэрофинишерных машин (на подъемных кранах 18 или на других приспособлениях, обеспечивающих натяжение троса на высотах, превышающих тормозной путь полета ЛА).
Для доказательства преимуществ предложенного ЛА по сравнению с известными были призведены расчеты параметров движения ЛА, похожего на самолет "Ил-103" (фиг.1) и садящегося на трос:
а) с тормозным крюком 6, расположенным на 0,05 метра выше и на 0,1 метра сзади центра масс тормозимого за трос аппарата;
б) с тормозным крюком по известному уровню техники (показан пунктирной линией на фиг.1), расположенным в хвосте ЛА.
Отдельные параметры расчета в зависимости от времени с момента зацепления ЛА за трос приведены на фиг.5. Сверху вниз показаны графики: изменения продольного момента (МZ), воздействующего на ЛА от силы торможения; угла поворота ЛА от воздействия МZ; вертикальной скорости снижения и величины снижения. (Сплошными линиями показаны параметры по изобретению, а пунктирными линиями - по известному уровню техники, причем Sп=72,5(м), а Тп=4(с).
Из графиков видно, что к концу торможения (четвертая секунда) ЛА с тормозным крюком по известному уровню техники испытывает пятикратное изменение направления поперечного момента вращения, амплитуда которого нарастает от плюс 860 единиц (Н·м) в начале торможения до минус 16230 единиц в конце (соответственно пять раз изменяется угловая скорость и угловое ускорение), а также пять раз изменяется угол поворота ЛА от воздействия МZ от плюс 0,3° до минус 43,5° в конце.
Если к результатам этого "вытряхивания" (или периодического "хлыста") добавить, что после остановки ЛА зависает на тросе вверх хвостом, то становится очевидным непригодность посадки такого ЛА на трос, а особенно с пассажирами.
В то же время ЛА по изобретению практически не страдает от продольного момента ввиду малости последнего (от нуля до плюс 514 и далее до минус 339 единиц) и плавно набирает угол поворота (от МZ) от нуля до плюс 21,5°. Кроме того? ЛА по изобретению имеет преимущества в скорости вертикального снижения (примерно на 11% меньше) и в величине снижения (на 20% меньше), вследствие того, что вертикальная составляющая тормозящей силы у него постоянно направлена вверх, а в известном ЛА эта составляющая в первой половине цикла торможения направлена вниз.
По сравнению с прототипом в предложенном ЛА отсутствует параплан и все связанные с ним недостатки, но есть тормозной крюк с сопутствующими механизмами. Стоимость этих устройств примерно одинакова, а вес тормозного крюка с сопутствующими механизмами примерно втрое меньше веса параплана. Например, для ДПЛА "Пчела - 1Т" вес парашюта не менее 12 кг плюс 16 кг - вес четырех пружинных опор, а вес механизма тормозного крюка длиной до 0,7 метра составит не более 4 кг.
Поскольку тормозной крюк в предложенном ЛА крепится к тем же шпангоутам, что и крыло, то это место фюзеляжа рассчитано на перегрузки обычно не менее 3 (у самолета Як-40 допустимая эксплуатационная перегрузка 3,4).
В приведенной выше таблице для пассажирских самолетов указаны относительно комфортные для пассажиров величины перегрузок до 1,5, а поэтому никакого упрочнения ЛА, в том числе и корабельных, не потребуется.
Предложенная конструкция ЛА резко расширяет сферу применения ЛА с безаэродромной посадкой. Например, беспилотные ЛА с посадкой на трос могут составить конкуренцию пилотируемым самолетам сельскохозяйственной авиации. Легкие пассажирские ЛА с посадкой на трос можно сажать высоко над домами практически в центре любого города. Соответственно надо решать вопросы взлета, но эта задача проще. Например, используя катапульту с рабочим ходом 150 метров для взлета, можно будет сажать на трос самые тяжелые пассажирские самолеты. Так, в Гонг-Конге для таких самолетов построили аэродром за 12 миллиардов долларов. Очевидно, что катапульта и тросовое устройство обошлись бы в 3-5 раз дешевле.
Реферат
Изобретение относится к летательным аппаратам (ЛА) с безаэродромной посадкой. Согласно изобретению, ЛА имеет фюзеляж, несущее крыло и бортовую часть тормозного и посадочного устройства, выполненную в виде тормозного крюка с захватом. Тормозной крюк установлен с возможностью поворота вокруг поперечной оси ЛА и с возможностью выдвижения захвата выше идущего на посадку аппарата. Захват тормозного крюка предназначен для зацепления за размещенный в месте посадки улавливающий трос (канат) стационарной части тормозного и посадочного устройств. Ось поворота тормозного крюка расположена в продольных границах средней аэродинамической хорды крыла ЛА. ЛА осуществляет посадку на трос, пролетая с выдвинутым тормозным крюком под натянутым тросом так, что захват тормозного крюка зацепляется за трос. Технический результат - повышение грузоподъемности ЛА, надежности посадки, снижение стоимости средств посадки, а также расширение сферы применения данного типа ЛА. 1 н. 4 з.п. ф-лы, 5 ил., 1 табл.

Комментарии