Беспилотный летательный аппарат вертикального взлета и посадки (варианты) - RU2648491C1
Код документа: RU2648491C1
Чертежи




Описание
Область техники, к которой относится изобретение
Изобретение относится к авиационной технике, в частности к системам стабилизации беспилотных летательных аппаратов (БЛА) вертолетного типа.
Уровень техники
Известен беспилотный летательный аппарат вертикального взлета и посадки, содержащий несущий винт с вращающимися в противоположные стороны лопастями, соединенными с системой автомата перекоса, гироскопом и электронной системой управления (см. патент RU 2566177, МПК: В64С 29/00, опубл. 20.10.2015).
Известен портативный комплекс авианаблюдений с автономно пилотируемым летательным микроаппаратом, содержащим корпус с несущим винтом, электроприводом, комплексом антенн и рулевыми машинками, связанными с аэродинамическими рулями (патент RU 2232104, МПК: В64С 29/02, опубл. 10.07.2004). В приборном отсеке корпуса размещены видеокамера с передатчиком видеоизображения, микропроцессор, приемник ГНСС и блок датчиков, включающий механические вибрационные гироскопы для измерения угловых скоростей, микромеханический акселерометр и барометрический высотомер. Стабилизация аппарата по курсу, крену и тангажу осуществляется автоматически с помощью автопилота. Информация с датчиков обрабатывается микропроцессором, формирующим управляющие сигналы для рулевых машинок, поворачивающих аэродинамические рули.
Известен многоцелевой БЛА вертикального взлета и посадки, осуществляющий подъем целевой нагрузки в виде съемных модулей, закрепляемых к корпусу посредством гиростабилизированного подвеса (патент RU 157424 U1, МПК: В64С 39/02, опубл. 10.12.2015). Управление перемещением аппарата и компенсацию возмущающих моментов по тангажу и рысканию осуществляет электронное вычислительное устройство, регулирующее скорости вращения винтов на основании показаний датчиков.
Известны технические решения беспилотников вертикального взлета и посадки, в которых стабилизация и управление осуществляются посредством консольно размещенных винтов стабилизации с приводами от вспомогательных двигателей (см. патент RU 122366 U1, МПК: В64С 29/00, опуб. 27.11.2012). Вращением винтов стабилизации управляет электронный блок, который по сигналам датчиков изменяет скорости вращения винтов или их шаг.
Известен беспилотный летательный аппарат, несущий видеокамеру, размещенную в полусфере на конце маятникового подвеса, что обеспечивает стабильность ее положения относительно Земли и исключает влияние наклона летательного аппарата на качество аэрофотосъемки (см. патент RU 2567496, МПК: В64С 39/02, опубл. 10.11.2015). Стабилизацию положения аппарата в целом осуществляет стандартная аппаратура управления по показаниям датчика углов крена.
Все вышеупомянутые аналоги имеют одни и те же существенные недостатки, обусловленные использованием электронных управляющих схем и гироскопических датчиков, а именно: дороговизна и сложность изготовления, малый рабочий ресурс, возможность отказа электроники. Кроме того, все вышеупомянутые конструкции беспилотников предназначены для подъема на высоту небольших грузов, таких как видеокамера.
Осуществить на подобных аппаратах подъем груза весом 15-20 кг с его последующим длительным удержанием на рабочей высоте практически невозможно. В этом случае общий вес аппарата составит порядка 60-70 кг, и для регулирования скоростей вращения воздушных винтов посредством электронной схемы стабилизации потребуется такой мощный источник питания, что сделает экономически нецелесообразным использование всей конструкции.
В качестве наиболее близкого аналога, по наличию признаков, сходных с существенными признаками заявляемого устройства, принята конструкция дистанционно-пилотируемого летательного аппарата вертикального взлета и посадки, входящего в состав авиационного разведывательного комплекса, см. патент на изобретение RU 2067952, МПК: В64С 39/02, опубл. 20.10.1996 г.
Упомянутый летательный аппарат содержит корпус, несущий винт и размещенные в создаваемом несущим винтом воздушном потоке аэродинамические рули управления по крену и тангажу. В корпусе размещен целевой груз в виде аппаратуры наблюдения. Управление полетом и стабилизацию аппарата осуществляет электронная система координатометрирования и автоматической посадки.
Недостатки ближайшего аналога аналогичны вышеупомянутым недостаткам беспилотников с электронными системами управления.
Перед разработчиками стояла проблема создания простого и надежного летательного аппарата-беспилотника, позволяющего осуществить подъем и удержание на высоте полезной нагрузки весом до 20 кг, в конструкции которого были бы исключены сложные электронные схемы управления, гироскопы и автомат перекоса лопастей.
Раскрытие сущности изобретения
Вышеупомянутая техническая проблема решена согласно первому варианту изобретения благодаря тому, что в беспилотном летательном аппарате вертикального взлета и посадки, содержащем корпус с несущим винтом, размещенные в создаваемом несущим винтом воздушном потоке аэродинамические рули управления по крену и тангажу и целевой груз, согласно заявляемому изобретению целевой груз свободно подвешен к корпусу в точке, лежащей на его вертикальной оси симметрии, и кинематически связан с аэродинамическими рулями посредством шарнирно-рычажных механизмов, каждый из которых включает коромысло и тяги, соединяющие одно плечо коромысла с грузом или его подвесом, а другое - с соответствующим рулем, при этом тяга, сочлененная одним концом с грузом или его подвесом, соединена с коромыслом с возможностью передачи движения только в одном направлении.
Вышеупомянутая техническая проблема решена согласно второму варианту изобретения благодаря тому, что в беспилотном летательном аппарате вертикального взлета и посадки, содержащем корпус с несущим винтом, размещенные в создаваемом несущим винтом воздушном потоке аэродинамические рули управления по крену и тангажу и целевой груз, согласно заявляемому изобретению аэродинамические рули выполнены каждый из двух, размещенных одна напротив другой, симметрично подвижных створок, верхние края которых сходятся у оси вращения, а нижние - разведены в стороны с образованием между створками острого угла, при этом целевой груз свободно подвешен к корпусу в точке, лежащей на его вертикальной оси симметрии, и кинематически связан с аэродинамическими рулями посредством шарнирно-рычажных механизмов, каждый из которых включает коромысло и тяги, соединяющие одно плечо коромысла с грузом или его подвесом, а другое - со створками соответствующего руля.
Техническим результатом предлагаемого изобретения является создание механической системы стабилизации БЛА, которая, по сравнению с традиционно используемыми, проста, малозатратна, надежна, не нуждается в энергопотреблении и позволяет осуществлять подъем груза весом до 20 кг и более с последующим его длительным удержанием на рабочей высоте.
Существенным отличием предлагаемого технического решения от ближайшего и других известных аналогов является то, что целевой груз, т.е. груз, для подъема которого на высоту предназначен летательный аппарат, помимо своего основного назначения, выполняет ряд дополнительных функций.
Закрепленный на подвесе целевой груз представляет собой простейший маятник, совершающий под действием силы тяжести механические колебания относительно вертикальной оси симметрии корпуса (она же - центральная ось аппарата). В состоянии равновесия аппарата положение подвеса с грузом и упомянутой оси совпадают. В случае наклона аппарата под действием силы тяжести подвес с грузом отклоняются от упомянутой оси на угол, соответствующий углу крена (или тангажа). Таким образом, свободно подвешенный относительно корпуса целевой груз является чувствительным элементом, реагирующим на изменение положения аппарата, т.е. выполняет функции датчиков в известных решениях.
Благодаря наличию кинематических связей, отклоняясь, груз воздействует на аэродинамические рули, выполняя тем самым функции устройства, управляющего положением рулей. При этом в качестве источника энергии для привода рулей используется работа силы тяжести, перемещающей груз.
Упомянутое совмещение функций позволило исключить из конструкции беспилотного летательного аппарата (БЛА) гироскопы, электронные управляющие устройства и рулевые привода.
В силу того что предлагаемая механическая система стабилизации не нуждается в энергопотреблении, размещаемая на борту беспилотника силовая установка (ЛВС, электродвигатель) служит только для вращения воздушных винтов, что позволяет существенно увеличить длительность работы аппарата на высоте, по сравнению с известными аналогами подобного типа.
Благодаря установке аэродинамических рулей в воздушном потоке несущего винта и наличию кинематических связей между грузом и рулями, последние выполняют демпфирующую роль и обеспечивают гашение собственных колебаний управляющего груза, что позволяет исключить погрешности управления и обеспечить срабатывание рулей только в случае действительного отклонения груза при наклоне аппарата.
Для работы предлагаемой системы стабилизации одинаково возможно закрепление тяги шарнирно-рычажного механизма как к грузу, так и к его подвесу. Это объясняется тем, что относительно подвеса груз зафиксирован жестко и образует с ним единое звено, угол отклонения и груза, и его подвеса один и тот же, равный углу наклона аппарата, что позволяет «снимать показания» с любой точки отклоняющегося маятника.
Аэродинамические рули выполнены в виде четырех одинаковых рулей управления, размещенных попарно-симметрично относительно центральной оси аппарата. Разделение рулей по крену и тангажу является условным. В зависимости от ориентации аппарата каждая пара рулей может выполнять и функции рулей высоты, и функции элеронов.
В силу симметричности предлагаемой конструкции отклонение целевого груза передается через шарнирно-рычажные механизмы одновременно в двух противоположных направлениях, вызывая отклонение сразу обоих рулей той или иной пары и создание на них равных моментов сил. Однако, как известно, для выравнивания положения аппарата моменты действующих сил должны различаться.
Получение разных моментов сил может быть обеспечено несколькими путями, что и обусловливает вариантность предлагаемого изобретения.
Согласно первому варианту изобретения, исключают работу второго руля пары за счет того, что тяга, сочлененная одним концом с грузом или его подвесом, соединена с коромыслом с возможностью передачи движения только в одном направлении.
Возможность однонаправленной передачи движения может быть реализована за счет выполнения упомянутой тяги на втором конце с щелевым пазом для размещения оси шарнира, закрепленной на соответствующем плече коромысла. Конструктивное исполнение аэродинамических рулей в этом случае несущественно.
Согласно второму варианту изобретения, для получения разных моментов сил используют двухсекционные аэродинамические рули, состоящие из двух, размещенных одна напротив другой, симметрично подвижных створок (аэродинамических поверхностей), верхние края которых сходятся у оси вращения, а нижние - разведены в стороны с образованием между створками острого угла.
Срабатывание системы стабилизации в этом случае сопровождается увеличением угла между створками одного руля и уменьшением угла между створками противоположного руля. Увеличение лобового сопротивления на одной стороне аппарата и уменьшение лобового сопротивления на противоположной стороне в совокупности способствуют выравниванию положения аппарата.
Подвес груза в конкретных примерах осуществления устройства может быть выполнен в виде стержня, закрепленного одним концом к корпусу посредством сферического шарнира либо отрезка троса. На свободном конце стержня закрепляется целевой груз.
Предлагаемое техническое решение может быть использовано в вертолетах-беспилотниках с различными схемами: с одним несущим винтом, с двумя несущими соосными винтами противоположного вращения, а также в схемах с разнесенной винтовой схемой.
Краткое описание чертежей
Заявляемое техническое решение поясняется чертежами, где показаны:
на фиг. 1 - беспилотный летательный аппарат вертикального взлета и посадки, выполненный согласно первому варианту изобретения;
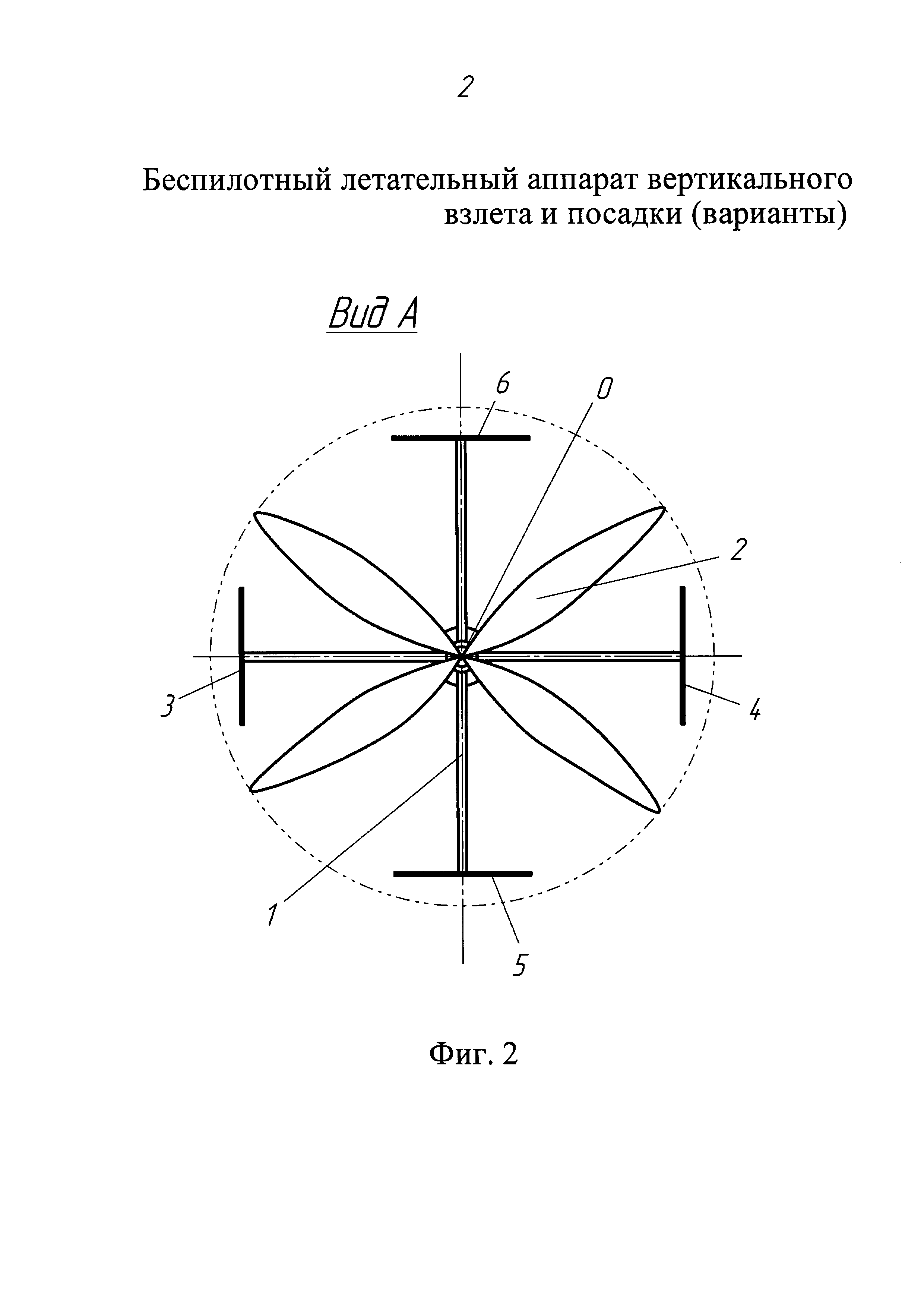
на фиг. 2 - тоже, вид сверху;
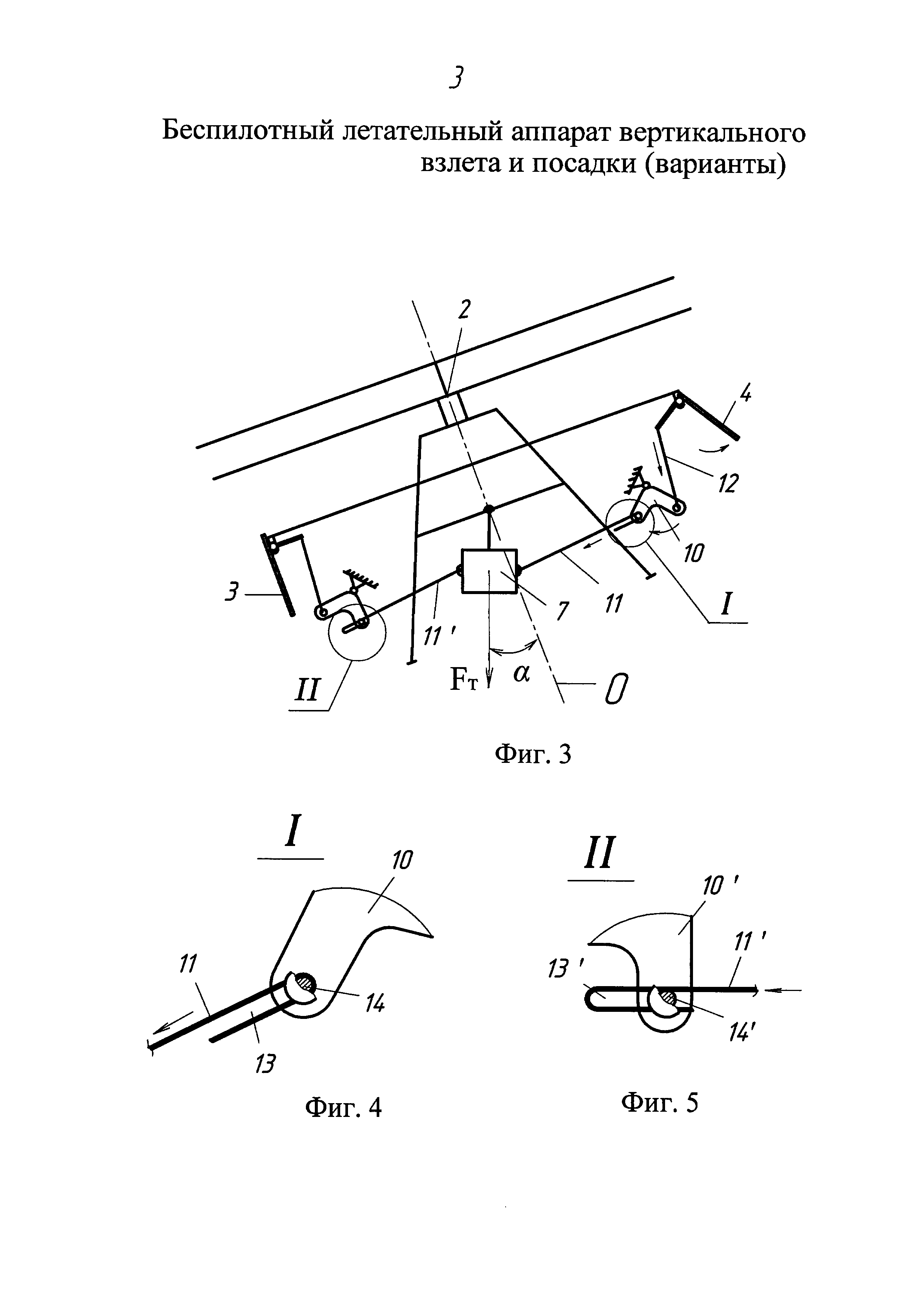
на фиг. 3 - показана работа системы стабилизации аппарата, согласно первому варианту;
на фиг. 4 - фрагмент I с фиг. 3, увеличено;
на фиг. 5 - фрагмент II с фиг. 3, увеличено;
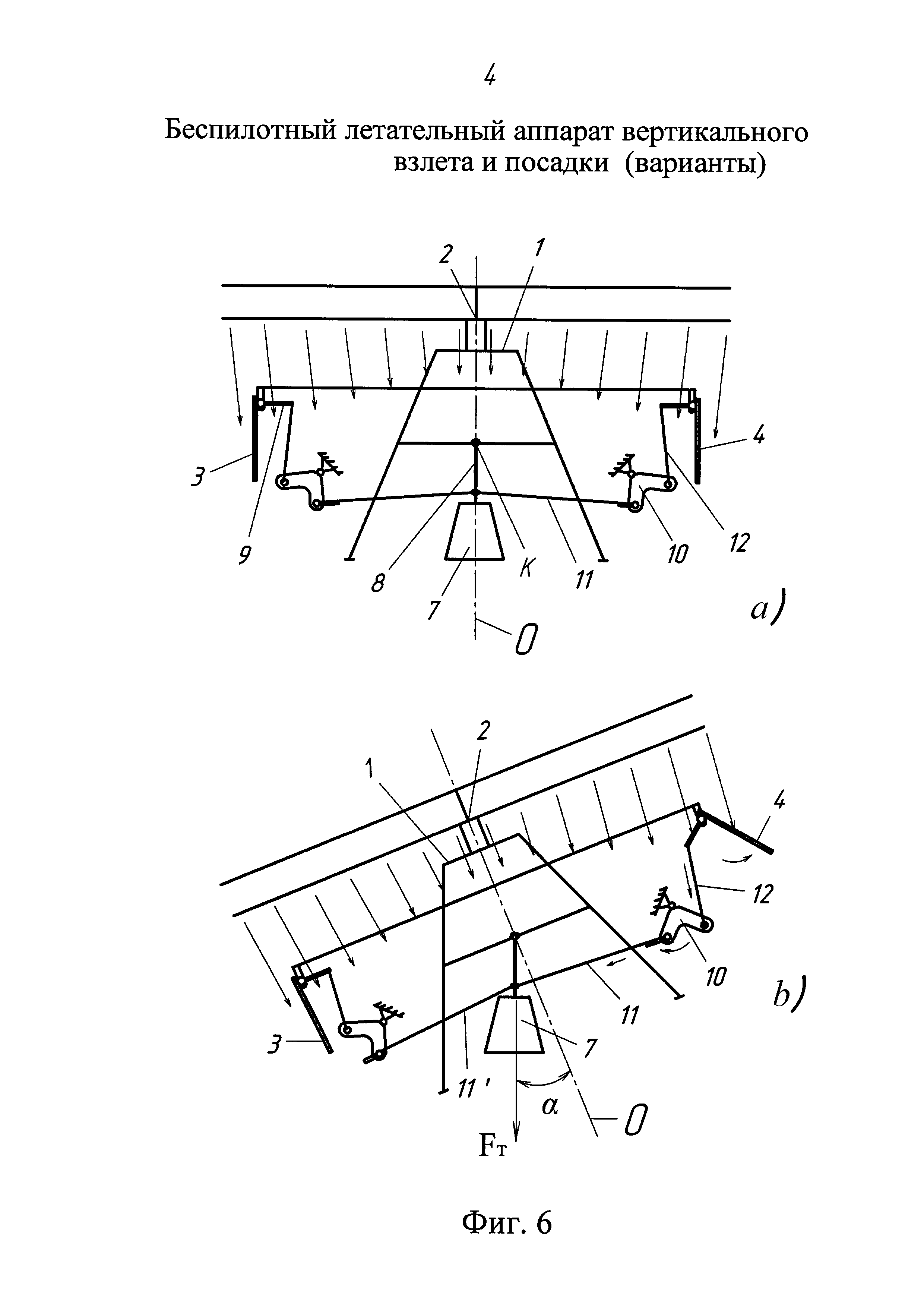
на фиг. 6 (а, в) - показана работа системы стабилизации БЛА в случае закрепления тяги шарнирно-рычажного механизма к подвесу груза;
на фиг. 7 - беспилотный летательный аппарат вертикального взлета и посадки, выполненный согласно второму варианту изобретения;
на фиг. 8 - фрагмент III с фиг. 7, увеличено;
на фиг. 9 - вид сверху на фиг. 7;
на фиг. 10 - показана работа системы стабилизации аппарата с фиг. 7.
Осуществление изобретения
Пример 1. Беспилотный летательный аппарат вертикального взлета и посадки содержит (см. фиг. 1-2) корпус 1 рамной конструкции с вертикальной осью симметрии О, несущий соосный винт 2, аэродинамические рули 3, 4, 5, 6 управления по крену и тангажу, размещенные в создаваемом несущим винтом 2 воздушном потоке (показан стрелочками), и целевой груз 7.
Целевой груз 7 представляет собой оборудование целевого назначения, для подъема которого предназначен летательный аппарат, либо контейнер с таким оборудованием. К примеру, в качестве целевого груза может выступать ретранслятор.
Груз 7 посредством нерастяжимого подвеса 8 подвешен к корпусу 1 в точке К, лежащей на оси О корпуса, и кинематически связан с рычагами 9 поворота рулей 3-6 посредством шарнирно-рычажных механизмов, каждый из которых включает коромысло (качалку) 10 и шарнирно соединенные с ним тяги: тягу 11, соединяющую одно плечо коромысла 10 с грузом 7, и тягу 12, соединяющую второе плечо коромысла 10 с рычагом 9 поворота соответствующего руля, причем тяга 11 выполнена с возможностью передачи движения только в одном направлении.
Рули 3 и 4 установлены с возможностью поворота относительно условной продольной оси аппарата и обеспечивают его стабилизацию по крену. Рули 5 и 6 установлены с возможностью поворота относительно условной поперечной оси аппарата и обеспечивают его стабилизацию по тангажу. Разделение рулей по крену и тангажу принято условно. В зависимости от ориентации аппарата каждая пара рулей может выполнять и функции рулей высоты, и функции элеронов.
Показанные на фиг. 1-2 аэродинамические рули 3-6 выполнены в виде цельноповоротных створок с одной аэродинамической поверхностью, жестко закрепленной на поворотном валу, снабженном рычагом управления.
При этом приведенный пример не ограничивает возможностей иного конструктивного исполнения рулей управления. Так, например, аэродинамическая поверхность руля может быть установлена на неподвижной оси с возможностью поворота относительно нее. В этом случае тягу 12 соединяют непосредственно с аэродинамической поверхностью для возможности поворота последней.
Подвес 8 может быть выполнен в виде стержня, закрепленного к корпусу 1 одним концом посредством сферического шарнира или отрезка троса.
Механическая система стабилизации пространственного положения беспилотника функционирует следующим образом (см. фиг. 3-5).
Несущий винт 2 создает подъемную силу, необходимую для подъема аппарата на заданную высоту. В состоянии равновесия аппарата положение подвеса 8 с грузом 7 совпадает с расположением оси О симметрии. Изменение пространственного положения аппарата, его наклон в ту или иную сторону вызывает отклонение свободно подвешенного груза 7 от вертикали (см. фиг. 3). Между осью О корпуса и направлением вектора силы тяжести груза Fт образуется угол α, соответствующий углу крена или тангажа.
Перемещаясь под действием силы тяжести, груз 7 воздействует на сочлененные с ним тяги 11 и 11', каждая из которых выполнена с щелевым пазом 13 (13') на одном конце, в котором размещена ось 14 (14'), закрепленная на соответствующем плече коромысла 10 (10'). Такая конструкция тяги обеспечивает возможность передачи движения только в одном направлении.
В приведенном примере щелевой паз 13 образован за счет петлеобразного сгиба концевого участка тяги И, выполненной из прутка, что обеспечивает простоту и технологичность изготовления. Однако приведенный пример не исключает иных форм реализации упомянутых признаков.
С одной стороны (см. фиг. 4), груз 7, отдаляясь, тянет за собой тягу 11, которая находится в зацеплении с осью 14 коромысла 10. Коромысло 10 поворачивается, перемещая тягу 12, которая, воздействуя на рычаг 9, отклоняет руль 4 на величину, необходимую для парирования крена. Размерами плеч коромысла 10 можно установить нужный угол отклонения руля.
С другой стороны (см. фиг. 5), груз 7, перемещаясь, толкает сочлененную с ним тягу 11' механизма, связывающего его с рулем 3. При этом ось 14' коромысла 10' свободно перемещается вдоль паза 13' тяги 11'. Само коромысло 10' остается неподвижным, тяга 12' не перемещается, руль 3 остается в исходном положении, вдоль воздушного потока, создаваемого несущим винтом 2, что исключает его из процесса регулирования.
Нулевой момент сил на руле 3 и возрастающий момент сил на руле 4 обеспечивают в совокупности увеличение восстанавливающей силы, направленной противоположно крену, что способствует выравниванию аппарата.
Благодаря тому что аэродинамические рули 3-6 размещены в воздушном потоке, создаваемом несущим винтом 2, они выполняют демпфирующую роль, обеспечивая гашение собственных колебаний груза 7. Воздушный поток создает некоторое давление на аэродинамические поверхности рулей, препятствуя их свободному раскачиванию, что позволяет исключить возникновение «ложных управляющих команд» от дрожания груза и обеспечить срабатывание рулей в случае реального наклона аппарата.
Пример 2. В некоторых случаях целесообразно соединить тяги 11 не с самим грузом 7, а с его подвесом 8 (см. фиг. 6а). Жестко связанные между собой груз 7 и подвес 8 работают как единое звено, отклоняясь на один и тот же угол α. Работа системы стабилизации в этом случае осуществляется аналогично вышеприведенному примеру (см. фиг. 6b).
Пример 3. На фиг. 7-9 показан беспилотный летательный аппарат вертикального взлета и посадки, содержащий двухсекционные аэродинамические рули 15-18, каждый из которых состоит из двух симметрично подвижных створок 19 и 20, верхние края которых сходятся к оси вращения 21, на которой они закреплены, а нижние - разведены в стороны с образованием между створками острого угла β (см. фиг. 8).
Для управления створками 19 и 20 служат рычаги поворота 22, каждый из которых соединен посредством своей тяги 23 с одним плечом коромысла 24, второе плечо которого посредством тяги 25 соединено с управляющим грузом 26, который посредством подвеса 27 закреплен к корпусу 1 аппарата в точке, лежащей на его вертикальной оси симметрии.
Механическая система стабилизации пространственного положения беспилотника в этом случае функционирует следующим образом. Несущий винт 2 создает подъемную силу, необходимую для подъема аппарата на заданную высоту. В положении равновесия подвес 27 с грузом 26 расположены на оси симметрии аппарата. Наклон аппарата вызывает отклонение груза 26 от вертикали (см. фиг. 10). Между осью О корпуса и направлением вектора силы тяжести груза Fт образуется угол α, соответствующий углу крена или тангажа.
Перемещающийся под действием силы тяжести груз 26 воздействует на сочлененные с ним тяги 25 и 25', которые поворачивают коромысла 24 и 24'. Поворачиваясь, коромысло 24 тянет тяги 23 и разводит между собой створки 19 и 20 руля 16 на еще больший угол, что ведет к увеличению на руле лобового сопротивления. Коромысло 24', поворачиваясь, способствует перемещению створок 19' и 20' руля 15, угол между которыми уменьшается, обеспечивая уменьшение лобового сопротивления на руле 15. Увеличение лобового сопротивления на стороне, противолежащей крену, и уменьшение лобового сопротивления на стороне крена в совокупности способствуют выравниванию положения аппарата.
Промышленная реализация предлагаемой системы стабилизации пространственного положения БЛА не составляет затруднений, т.к. весь механизм управления аэродинамическими рулями построен на механических связях.
Изготовленные образцы предлагаемого беспилотника успешно прошли стендовые, наземные и летные испытания. Испытания показали, что летательный аппарат, имея небольшие габариты и вес и обладая низким энергопотреблением, позволяет продолжительное время удерживать на заданной высоте целевой груз весом до 20 кг и более, стабильно сохраняя вертикальную устойчивость.
Реферат
Изобретение относится к авиационной технике, в частности к системам стабилизации беспилотных летательных аппаратов вертолетного типа. Беспилотный летательный аппарат вертикального взлета и посадки содержит корпус с несущим винтом, размещенные в создаваемом несущим винтом воздушном потоке аэродинамические рули управления по крену и тангажу и целевой груз. Груз свободно подвешен к корпусу в точке, лежащей на его вертикальной оси симметрии, и кинематически связан с аэродинамическими рулями посредством шарнирно-рычажных механизмов. Каждый из механизмов включает коромысло и тяги, соединяющие одно плечо коромысла с грузом или его подвесом, а другое - с соответствующим рулем. Тяга, сочлененная одним концом с грузом или его подвесом, соединена с коромыслом с возможностью передачи движения только в одном направлении. Обеспечивается упрощение конструкции, снижение затрат, повышение надежности. 2 н. и 5 з.п. ф-лы, 10 ил.
Комментарии