Силовая установка летательного аппарата на двухподвижном подвесе - RU2700103C1
Код документа: RU2700103C1
Чертежи



Описание
Изобретение относится к области авиации, в частности к силовым установкам на двухподвижном подвесе и может быть использовано в беспилотных и дистанционно управляемых летательных аппаратах.
Так, из уровня техники известен электродвигатель с воздушными винтами беспилотного летательного аппарата (ЛА) вертикального взлета и посадки, который представляет собой «винт в кольце», выполненный с возможностью поворота из горизонтальной плоскости в вертикальную и обратно и связанный с аккумуляторной батареей, а воздушные винты выполнены с электронной регулировкой числа оборотов (патент РФ № 165676, опубликованный 27.10.2016).
Недостатком известного решения является невозможность гибкого управления воздушными потоками, генерируемыми винтами ЛА, за пределами возможностей поворота только в одной плоскости одновременно.
За наиболее близкий аналог к патентуемому решению принято устройство повышения стабилизации и маневренности беспилотных летательных аппаратов с применением гироскопического эффекта, которое содержит корпус гироскопа, ротор, внутреннюю и внешнюю рамы гироскопа, электрические двигатели и редукторы, находящиеся на осях вращения поворотных рам. Для изменения траектории полета ось вращения ротора гироскопа поворачивается с помощью электрических двигателей и редукторов, находящихся на осях вращения поворотных рам, таким образом, чтобы направления созданных гироскопических моментов совпадали с направлением поворота беспилотного летательного аппарата (международная заявка № 20170200972, опубликованная 09.02.2017).
Недостатком наиболее близкого аналога является использование в качестве дополнительной системы и/или вспомогательной системы, которая оказывает косвенное влияние на движение летательного аппарата.
Технической проблемой, на решение которой направлено данное изобретение, является расширение арсенала технических средств, создание простой и надежной конструкции силовой установки на двухподвижном подвесе, способной осуществлять позиционирование в пространстве двигателя несущего винта, повышение маневровых возможностей, обеспечение различных углов полета и быструю смену направления движения летательного аппарата.
Технический результат, достигаемый при реализации данного изобретения, заключается в повышении маневровых возможностей, обеспечении различных углов полета и быструю смену направления движения летательного аппарата.
Указанный технический результат достигается в силовой установке на двухподвижном подвесе, которая содержит внешний кольцевой контур с приводом его вращения, внутренний контур в виде стержня с приводом его вращения, установленный внутри внешнего кольцевого контура перпендикулярно оси вращения внешнего кольцевого контура, двигатель с несущим винтом, закрепленный на внутреннем контуре, и блок управления связанный с приводами вращения внешнего кольцевого и внутреннего контуров и двигателем несущего винта.
Благодаря выполнению силовой установки на двухподвижном подвесе, содержащей внешний кольцевой контур с приводом его вращения, внутренний контур в виде стержня с приводом его вращения, установленный внутри внешнего кольцевого контура, двигатель с несущим винтом, закрепленный на внутреннем контуре, и блок управления, связанный с приводами вращения внешнего кольцевого и внутреннего контуров и двигателем несущего винта, обеспечивается повышение маневровых возможностей, различные углы полета и быстрая смена направления движения летательного аппарата.
Благодаря выполнению силовой установки на двухподвижном подвесе, где внутренний контур с двигателем и несущим винтом расположен внутри внешнего контура перпендикулярно оси вращения внешнего контура, с возможностью отдельного управления двигателем несущего винта, поворотом внешнего кольцевого и внутреннего контуров посредством блока управления обеспечиваются различные углы полета, повышение маневровых возможностей и быстрая смена направления движения летательного аппарата.
В частности, концы стержня внутреннего контура через подшипники соединены с двумя диаметрально противоположными точками внутри внешнего кольцевого контура.
В частности, двигатель с несущим винтом закреплен на монтажной площадке, расположенной посередине стержня внутреннего контура.
В частности, привод вращения внешнего кольцевого и внутреннего контуров содержит сервоприводы или электрические моторы, соединенные через зубчатое соединение с цилиндром на внешнем кольцевом контуре, токоприемники и приемные пластины.
В частности, силовая установка на двухподвижном подвесе оснащена датчиками ориентации летательного аппарата в пространстве, соединенными с блоком управления, и
расположенными по периметру внутреннего обода, на входных контактах сервопривода, вокруг места крепления лопасти несущего винта к монтажному блоку, в пространстве между ободьями внешнего контура, что дополнительно повышает маневровые возможности и ускоряет смену направления движения летательного аппарата.
В частности, в качестве датчиков ориентации летательного аппарата в пространстве использованы гироскопы, акселерометры, приборы, показывающие углы поворота внешнего кольцевого и внутреннего контуров, мощность сервоприводов, стабильность работы двигателя несущего винта и привода внешнего кольцевого и внутреннего контуров.
В частности, блок управления силовой установки на двухподвижном подвесе содержит радиоприемники и выполнена с возможностью соединения и обмена данными с бортовым компьютером летательного аппарата.
В частности, привод вращения внешнего кольцевого контура выполнен с возможностью соединения с летательным аппаратом посредством подвижного цилиндрического соединения.
В дальнейшем, изобретение поясняется примером конкретного выполнения и чертежами.
На фиг.1 представлена конструкция силовой установки на двухподвижном подвесе.
На фиг.2 – конструкция внутренней части силовой установки на двухподвижном подвесе.
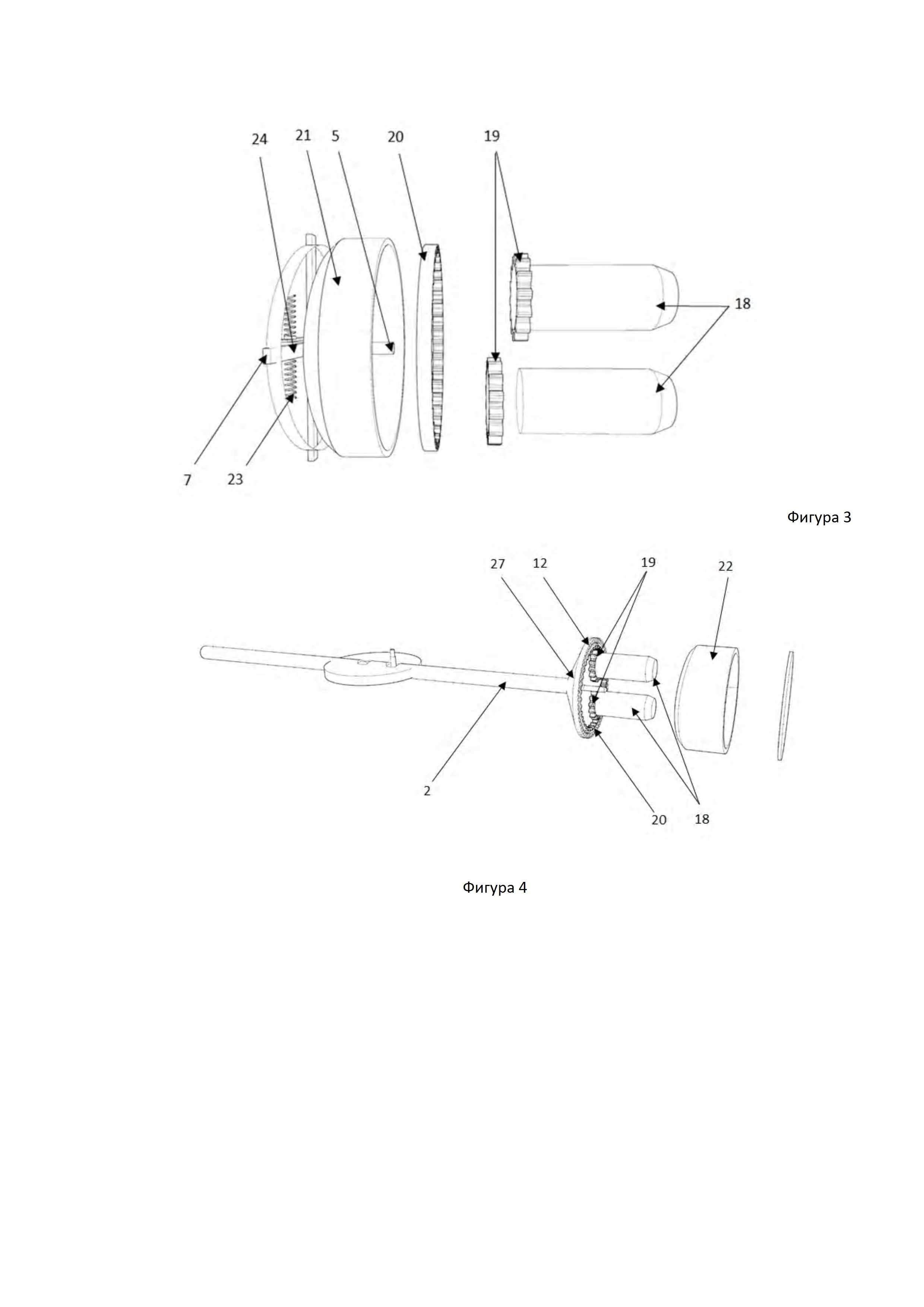
На фиг.3 – конструкция привода вращения внешнего кольцевого контура.
На фиг.4 – конструкция привода вращения внутреннего контура.
На фиг.5 – расположение датчиков на несущем винте.
На фиг.6 – пример использования силовых установок на двухподвижном подвесе в летательном аппарате.
На фиг.7 – летательный аппарат с силовыми установками на двухподвижном подвесе с повернутым внутреннем контуром тыльных силовых установок на двухподвижном подвесе.
На фиг.8 – летательный аппарат с силовыми установками на двухподвижном подвесе с повернутыми внешними кольцевыми контурами.
Согласно фигурам силовая установка на двухподвижном подвесе летательного аппарата (ЛА) содержит внешний кольцевой контур 1 с приводом его вращения 3, внутренний контур 2 с приводом его вращения 4, двигатель 16 с по меньшей мере одним несущим винтом 17 и блок управления 9 упомянутыми приводами 3, 4 и двигателем 16,
выполненный с возможностью соединения и обмена данными с бортовым компьютером летательного аппарата.
Внешний кольцевой контур 1 выполнен в виде кольца, состоящего из двух ободьев: внешнего 10 и внутреннего 11. Внутренний обод 11 установлен во внешний обод 10 с образованием свободного пространства между ними для установки блока управления 9 приводами 3, 4 внешнего кольцевого 1 и внутреннего 2 контуров соответственно и силового кабеля 5.
Внутренний контур 2 выполнен в виде полого стержня с площадкой 8 посередине для монтажа двигателя 16 с несущим винтом 17 и расположен внутри внешнего кольцевого контура 1 с возможностью его вращения вокруг своей оси за счет наличия собственного привода 4. При этом концы стержня внутреннего контура 2 через подшипники 12 соединены с двумя диаметрально противоположными точками внутреннего обода 11 внешнего кольцевого контура 1. Привод вращения 3 внешнего кольцевого контура 1 и внутренний контур 2 с приводом его вращения 4 расположены таким образом, что ось вращения внутреннего контура 2 перпендикулярна оси вращения внешнего кольцевого контура 1.
Привод вращения 3 внешнего кольцевого контура 1 содержит сервоприводы или электрические моторы 18 (в зависимости от массагабаритных параметров ЛА), соединенные через зубчатое соединение 19, 20 с цилиндром 21, цилиндр 21 крепится к внешнему ободу 10 внешнего кольцевого контура 1. Токоприемники 7 монтируются на внутреннем ободе 11 посредством пружинного соединения 23, которое обеспечивает постоянное соединение приемных пластин 24, выполненных из сверхпроводникового материала, как в маршевых так и в критических условиях полета при разнообразных нагрузках. Приемные пластины 24 контактируют с силовыми кабелями 5 силовой установки на двухподвижном подвесе в рамках внешнего кольцевого контура 1.
Привод вращения 4 внутреннего контура 2 содержит сервоприводы или электрические моторы 18 (в зависимости от массагабаритных параметров ЛА), расположенные в приводе вращения 4, соединенных через зубчатое соединение 19, с зубчатым соединением 20 и подшипниками 12, соединенными с осью внутреннего контура 2 через блок 27, цилиндр 22 крепится к внешнему ободу 10 внешнего кольцевого контура 1. Токоприемники 7 монтируются на внутреннем ободе 10 посредством пружинного соединения 23, которое обеспечивает постоянное соединение приемных пластин 24, выполненных из сверхпроводникового материала, как в маршевых так и в критических условиях полета, при разнообразных нагрузках. Приемные пластины 24
контактируют с силовыми кабелями 5 силовой установки на двухподвижном подвесе в рамках кольцевого контура.
В пространстве между внешним 10 и внутренним 11 ободьями внешнего контура расположен блок управления приводами внешнего кольцевого 1 и внутреннего 2 контура, соединенный силовыми проводами 5 с токоприемником 7 привода вращения 3 внешнего кольцевого контура 1, токоприемником 7 привода вращения внутреннего контура 2 и двигателем 16 с несущим винтом 17, расположенными на площадке 8 внутреннего контура 2. Силовой провод 5, соединяющий двигатель 16 несущего винта 17 и токоприемник 7, проходит внутри полого стержня внутреннего контура 2.
Блок управления 9 содержит электронные системы, может содержать радиоприемники (в компактных моделях) и полноценные бортовые компьютеры. Размещение блока управления 9 на силовой установке на двухподвижном подвесе позволяет разгрузить транспортную капсулу.
Радиоприемник представляет собой небольшую прямую или изогнутую плату, на которой распечатаны все необходимые электронные элементы и предназначен для передачи информации по защищенному радио каналу между силовой установкой на двухподвижном подвесе и бортовым компьютером, а также другими приводами для синхронизации работы.
Блок управления 9 обрабатывает и анализирует информацию с гироскопов, акселерометров и прочих приборов ориентации летательного аппарата в пространстве, управляет питанием, осуществляет позиционирование внешнего кольцевого 1 и внутреннего 2 контуров с максимальной точностью, вычисляет данные для максимально эффективной мощности двигателя 16 несущего винта 17.
В обрабатываемую информацию входят следующие значения:
а) показатель углов поворота каждого контура (внешнего 1 и внутреннего 2) в градусах,
б) показатель мощности двигателей-сервоприводов 18 приводов 3 и 4,
в) показатель стабильности несущего винта 17,
г) показатель стабильности внешнего 1 и внутреннего 2 контуров силовой установки на двухподвижном подвесе.
Показатель углов поворота каждого контура (внешнего 1 и внутреннего 2) в градусах измеряется с помощью датчиков, расположенных по периметру внутреннего обода, как можно ближе к винтам, так как при возникновении центробежной силы при вращении несущих винтов возможны отклонения в показания, и на внешних элементах
несущего винта 17. Датчики измерения углов поворота отвечают за точное измерение углов вращения контура 1 и 2, фактически они измеряют полное 360 градусное вращение.
Показатель мощности двигателей-сервоприводов 18 приводов 3 и 4 измеряется с помощью датчиков чистоты тока, расположенных на входных контактах сервопривода.
Показатель стабильности несущего винта 17 измеряется с помощью датчиков отклонения лопасти 26, расположенных вокруг места крепления лопасти 30 несущего винта 17 к монтажному блоку 6 для лопастей, светового датчика и датчика симметрии 29, расположенных на свободном конце каждой лопасти 30 несущего винта 17.
Датчик отклонения лопастей 26 построен по принципу определения смещения угла наклона лопасти 30 в определенном секторе вращения путем фиксации луча лазера на световом датчике 29. Если отклоняется только лопасть это зафиксируют датчики отклонения лопасти 26. Если происходит «восьмерка», то это определяется по следующей схеме. Лазер 28 располагается неподвижно на платформе 8. Луч от него поступает в рассеиватель 25 и расходится по каждой из лопастей 30 и попадает на световой датчик 29. При образовании «восьмерки», будет наблюдаться одинаковая чистота прерывания луча света, который будет теряться в канале лопасти 30, в таком случае будет применяться алгоритм, нейтрализующий последствия потери мощности воздушного потока.
Показатель стабильности внешнего 1 и внутреннего 2 контуров измеряется с помощью двадцати четырех датчиков стабильности, расположенных в пространстве между ободьями 10, 11 внешнего контура 1 с шагом в 15 градусов, синхронизация информации для обмена с бортовым компьютером, расположенном в корпусе летательного аппарата, обработка информации, полученной с бортового компьютера. Датчики стабильности отвечают за определение «восьмерки» при смене положения винтов по любой оси.
В управление питанием входят следующие значения: управление питанием, подаваемым на приводы 3, 4 вращения контуров; управление питанием, подаваемым на двигатель 16 несущего винта 17.
В управление системами приводов 3, 4 входят следующие значения: управление вращением внешнего кольцевого контура 1, управление вращением внутреннего контура 2.
Под контроль регулирования тяги ротора двигателя 16 несущего винта 17 входят следующие значения: регулирование оборотов упомянутого двигателя 16, регулирование шага лопастей.
Силовая установка на двухподвижном подвесе работает следующим образом.
Основная задача силовой установки на двухподвижном подвесе - управляемое позиционирование в пространстве двигателем 16 несущего винта 17.
Электрическая энергия передается по силовым кабелям 5 от транспортной капсулы (на фигурах не показана) до площадки монтажа двигателя 8. В местах перехода между транспортной капсулой, внешнего кольцевого 1 и внутреннего 2 контуров используются контактирующие или жидкостные токоприемники 7 или вращающиеся трансформаторы.
Позиционирование в пространстве осуществляется путем вращения внешнего кольцевого 1 и внутреннего 2 контуров при помощи приводов 3 и 4. В приводах 3 и 4 располагаются двигатели или сервоприводы 18, которые активируются при поступлении сигналов от транспортной капсулы и/или блока управления 9 приводами вращения внешнего кольцевого 1 и внутреннего 2 контуров.
Блок управления 9 отвечает за «опорно-двигательную систему» летательного аппарата, т.е. производит независимые вычисления для передачи точных данных на приводы 3 и 4 для выполнения ими маневров.
В качестве примера использования силовой установки на двухподвижном подвесе рассмотрим летательный аппарат, к фюзеляжу которого через подвижное цилиндрическое соединение устанавливаются силовые установки на двухподвижном подвесе таким образом, чтобы обеспечить соосное вращение несущих винтов.
Выполнение горизонтального полета согласно фигурам 6, 7.
Команда запуск двигателя. После данной команды двигатели запускаются по часовой стрелке, от фронтального 13 к тыльному левому 14. Время задержки запуска 1-3 секунды. Это требуется для установки силы вибрации, создаваемой каждым двигателем и расчета необходимых параметров вращения контуров 1, 2 (рам) силовой установки на двухподвижном подвесе.
После достижения необходимого количества оборотов несущие винты 17 меняют шаг и выходят из зафлюгированного состояния в маршевое, тем самым создавая подъёмную силу.
После отрыва от земли начинается набор высоты. Далее осуществляется достижение стартового коридора, который задается бортовым компьютером и навигационной системой исходя из конечной точки, характеристики местности и наличии запрещенных зон для полета. Бортовой компьютер формирует траекторию, а блок управления на силовой установке на двухподвижном подвесе управляет приводами и двигателем по данным, получаемым от бортового компьютера. Как только летательный аппарат выходит на маршрут тыльные силовые установки на двухподвижном подвесе 14,
15 осуществляют поворот внутреннего контура 2 на 30°, создавая тем самым не только подъемную, но и толкающую силу (см. фиг. 4).
При достижении максимальной тяги на фронтальной 13 силовой установке на двухподвижном подвесе и отсутствии опасности срыва подъемного потока, тыльные силовые установки на двухподвижном подвесе 14, 15 могут переходить из положения «крейсерская» в режим «форсаж», поворачивая несущие винты тыльных силовых установок на двухподвижном подвесе 14, 15, путем вращения внутреннего контура 2 до 60-70°, создавая тем самым большую толкающую силу.
Выполнение плавного поворота «180 направо» в режиме висения согласно фигуре 8.
При выполнении висения может потребоваться развернуть летательный аппарат по центральной оси на 180°.
Для осуществления данного маневра используется фронтальная силовая установка на двухподвижном подвесе 13 в режиме вращения внешнего кольцевого контура 1 с помощью его привода 3, осуществляют поворот на 30°, создавая тем самым толкающую силу.
В тыльной левой силовой установке на двухподвижном подвесе 14 осуществляют поворот внешнего кольцевого контура 1 на 30° по горизонтали посредством привода 3 внешнего кольцевого контура и поворот внутреннего кольцевого контура 2 на 15° по вертикали посредством привода 4 внутреннего контура, создавая дополнительную толкающую силу.
Тыльная правая силовая установка на двухподвижном подвесе 15 находится в режиме висения и увеличивает мощность, чтобы нейтрализовать потерю от смещения несущего потока двух других роторов двигателей 16.
По завершению вращения все силовые установки на двухподвижном подвесе возвращаются в состояние спокойствия.
Блок управления 9 получает данные от всех датчиков о состоянии всех конструктивных элементов силовой установки на двухподвижном подвесе, на основе полученных данных и заданного маршрута осуществляет управление приводами внешнего и внутреннего контуров 3 и 4 и двигателями несущих винтов, изменяя угол поворота внешнего кольцевого и внутреннего контуров 1 и 2, мощность двигателей несущих винтов.
Таким образом, силовая установка на двухподвижном подвесе предназначена для осуществления полетов путем замены классических систем управления летательным аппаратом, таких как элероны, рули направления, рули высоты, системы управления
вектором тяги, автоматами перекоса, закрылками, предкрылками, и является не дополнительным, а основным устройством управления летательным аппаратом, не требующим каких-либо внешних/внутренних устройств для изменения положения летательного аппарата в пространстве. Фактически силовая установки на двухподвижном подвесе позволяет изменять положение несущего винта и вектора его тяги путем вращения по продольным и поперечным осям. Силовая установка на двухподвижном подвесе располагается на внешней части корпуса летательного аппарата и заменяет крылья, горизонтальное и вертикальное хвостовое оперение, несущий винт или группу винтов, толкающий винт, реактивных или ракетный двигатель, а также любую другую силовую установку, прямого расположения.
Реферат
Изобретение относится к области авиации, в частности к конструкциям беспилотных и дистанционно управляемых летательных аппаратов. Силовая установка летательного аппарата на двухподвижном подвесе содержит внешний кольцевой контур с приводом его вращения, внутренний контур в виде стержня с приводом его вращения, установленный внутри внешнего кольцевого контура перпендикулярно оси вращения внешнего кольцевого контура. Двигатель с несущим винтом закреплен на внутреннем контуре. Блок управления связан с приводами вращения внешнего кольцевого и внутреннего контуров и двигателем несущего винта. Концы стержня внутреннего контура через подшипники соединены с двумя диаметрально противоположными точками внутри внешнего кольцевого контура. Двигатель с несущим винтом закреплен на монтажной площадке, расположенной посередине стержня внутреннего контура. Обеспечивается возможность повышения маневренных характеристик, полета на различных углах, быстрой смены направления движения летательного аппарата. 8 з.п. ф-лы, 8 ил.
Комментарии