Оптимизированная конфигурация двигателей для летательного аппарата - RU2485021C2
Код документа: RU2485021C2
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к конфигурации тяговых двигателей для большого гражданского летательного аппарата, а более конкретно для летательного аппарата, включающего в себя конфигурацию двигателей, прикрепленных к задней части фюзеляжа, что обеспечивает возможность оптимизации двигателей в некоторых летных ситуациях, главным образом во время взлета и крейсирования.
Уровень техники изобретения
Преимущества наличия двигателей, создающих отклонение вектора тяги или отклоненный вектор тяги, хорошо известны. За последние годы системы, которые предоставляют возможность получения и управления вектора тяги двигателей, развивались на основе, по существу, двух типов действия: либо посредством выборочного отклонения выхлопных газов и/или воздуха двигателя из вентилятора второго контура посредством направляющих механических элементов в соплах (см., например, ES2010586), или посредством изменяемой области выхлопных газов без изменения угла вектора тяги двигателей. Все данные механизмы в большей или меньшей степени усложняют как конфигурацию сопел, так и системы их управления, что приводит к отказу от их применения во многих из новых моделей летательных аппаратов в связи с тем, что соотношение между преимуществами их использования и сопряженными проблемами и издержками, связанными с тем фактом, что они располагаются в элементе, который является сложным и существенно важным для безопасности летательного аппарата, как, например, его системы обеспечения движения, не является позитивным.
Как описано в документе US6938408 B2, технология отклонения вектора тяги получила весьма удовлетворительные результаты в военной авиации от использования, продемонстрированного в военных самолетах для режимов полетов на малых скоростях или с большими углами атаки, а также при ее тестировании на больших высотах и средних скоростях с целью уменьшения лобового сопротивления в крейсерском полете. Определяя устойчивость самолета, как силы и моменты, генерируемые для того, чтобы вернуть равновесное положение, когда он находится вне указанного положения, чем больше устойчивость летательного аппарата, тем меньше его маневренность, т.е. тем меньше способность поверхностей управления выводить машину из равновесия. Именно по этой причине, системы, добавляющие управляемость самолету, как, например, отклоненный вектор тяги двигателей, были использованы, прежде всего, в военной авиации, в которой возможность их использования не оставляет никаких сомнений, придавая конфигурацию, в которой маневренность или управляемость летательного аппарата является высшим приоритетом. Однако ту же самую систему, которая имеет место с остальными аэродинамическими поверхностями и поверхностями управления самолета, которые могут принимать участие в отклонении летательного аппарата от точки его равновесия, можно применять аналогичным образом для противоположного явления, т.е. она может вносить вклад в статическую и динамическую продольную устойчивость летательного аппарата.
Использование систем отклонения вектора тяги в коммерческой авиации также понятно с точки зрения энергоемкости самолета. Известно, что для того, чтобы летательный аппарат имел продольную устойчивость его центр тяжести (CG) должен находиться на определенном расстоянии для каждого режима полета относительно аэродинамического центра давления (CP). Самолеты конструируют таким образом, что моменту пикирования, обусловленному тем фактом, что CG расположен впереди CP, противодействует момент, обусловленный горизонтальным хвостовым стабилизатором. Если есть возможность вносить вклад в устойчивость летательного аппарата посредством возможности направлять выхлопные газы, могут быть разработаны самолеты, в которых площадь хвостового оперения меньше и работает с меньшими углами атаки, создавая, вследствие этого, меньшее аэродинамическое лобовое сопротивление. Уменьшение аэродинамического лобового сопротивления и веса конструкции означает меньшую потерю тяговой энергии и, следовательно, улучшенную энергоемкость.
Несколько проведенных исследований отмечают улучшение во всех режимах полета посредством оптимизации угла вектора тяги. Одним из основных соображений при конструировании самолета является угол наклона двигателей относительно горизонтальной плоскости фюзеляжа. Оптимальный наклон зависит от особенностей самолета, а также от режима полета. С точки зрения воздействий, возникающих на крыле, положительный угол тяги вносит вклад в снижение требований к подъемной силе крыла, несмотря на то, что это означает небольшое уменьшение горизонтальной составляющей силы тяги. Делая первый шаг в разработке системы изменяемой тяги, необходимо осмыслить тот факт, что в каждом режиме полета оптимальный угол тяги изменяется. Управляемость данной переменной величины в полете помогает в уменьшении скорости и расстояния в процессе взлета, в достижении большей высоты с тем же самым уровнем тягового усилия в фазе подъема, минимального тягового усилия в условиях крейсирования, лучшего интервала планирования при снижении и уменьшении скорости на финальном этапе захода на посадку и, следовательно, расстояния для приземления.
Преимущества использования отклонения вектора тяги также описаны в документах, известных в данной области, отыскивающих жизнеспособное решение для применения, которое контрастирует с возможностью дальнейшего использования в реальных разработках летательных аппаратов. Цель настоящего изобретения состоит не только в том, чтобы разработать систему, предоставляющую отклонение вектора тяги в летательном аппарате, но чтобы систему можно было также применять. Основной проблемой, рассматривавшейся запатентованными системами до сих пор, является сложность, добавляемая их использованием в полете. Так как большое количество движущихся деталей, которые данные системы предоставляют в сопла двигателей, означает, что их применение влечет за собой излишнюю стоимость обслуживания для обеспечения правильной работы системы. Другие известные системы добавляют большую сложность системам управления полетами, что означает, что время, используемое для их оптимальной рабочей мощности, не приводит к улучшению общего поведения летательного аппарата, на которое они предполагают оказывать влияние, но они не являются определяющими факторами указанного поведения.
Настоящее изобретение предлагает решение упомянутых выше проблем.
Сущность изобретения
Настоящее изобретение, таким образом, относится к системе обеспечения наклона тяговых двигателей для большого гражданского летательного аппарата, а более конкретно к системе, которую можно использовать в таких летательных аппаратах, включающих в себя конфигурацию двигателей, прикрепленных к задней части фюзеляжа. Применение данного изобретения обеспечивает возможность оптимизации действий в процессе взлета, подъема, крейсирования и посадки, улучшая, в то же самое время, безопасность во время полета и уменьшая минимальную скорость взлета и посадки.
Изобретение разрабатывает систему, которая не затрагивает конструкцию двигателей, и основано на системе, разработанной и используемой на всех коммерческих летательных аппаратах, находящихся в настоящее время в стадии конструирования, т.е. оно предоставляет решение, подобное триммированию или балансировке горизонтального хвостового стабилизатора, как в конфигурации, так и в управлении, что обеспечивает их жизнеспособность.
Изобретение, в частности, предназначено для конструкции самолета, в которой его относительная польза является большей, т.е. для конфигурации летательного аппарата, двигатели которого располагаются в задней части фюзеляжа. Изменение положения двигателей вовлекает перемещение пилонов, поскольку они представляют собой конструкции, по своей сути, прикрепленные к самолету. Момент тангажа, достигаемый направленностью выхлопных газов, увеличивается с подъемом, вызываемым пилонами. Сумма этих двух эффектов является относительно большей для конфигурации летательного аппарата с двигателями, расположенными в задней области фюзеляжа, поскольку они располагаются дальше от центра тяжести, чем, если бы они были прикреплены, например, к агрегату крыла. Уменьшение массы хвостового оперения, таким образом, относительно больше в результате действия, обусловленного отклонением вектора тяги, что вносит вклад в улучшенную энергоемкость.
Цель данного изобретения состоит в том, чтобы смонтировать двигатели самолета в задней части фюзеляжа с устройством, которое обеспечивает возможность изменения угла атаки пилонов и, следовательно, отклонения вектора тяги двигателей. Данное изменение обеспечивает возможность создания момента тангажа летательного аппарата. Наличие дополнительного управления для того, чтобы создавать момент тангажа, обеспечивает возможность оптимизации двигателя в некоторых режимах полета, главным образом в процессе взлета и крейсирования. Потребность в максимальной мощности двигателей может, таким образом, быть уменьшена с уменьшением их массы, и вследствие данного уменьшения массы может быть уменьшена масса пилонов и задней части фюзеляжа. Чтобы вызвать момент тангажа, дополнительно используют стабилизатор так, что его размер может быть уменьшен, поскольку он имеет тяговую систему с изменяемой тягой. Данные уменьшения влекут за собой улучшенную энергоемкость самолета.
Изобретение нацелено не на рабочий механизм системы триммирования или балансировки пилона, но скорее на обеспечение триммирования или балансировки таких пилонов для конфигурации сборного узла в задней части фюзеляжа, добиваясь, вследствие этого, управляемого и оптимального отклонения вектора тяги для каждой фазы полета без изменения внутренней конструкции двигателей. Также оно не нацелено на механизм для двигателей с целью отклонения газов двигателя, но скорее оно использует общепринятые двигатели, в которых имеется единственная и горизонтальная составляющая выхлопа.
Другие признаки и преимущества настоящего изобретения будут явствовать из следующего подробного описания иллюстративного варианта осуществления его объекта в сопровождении прикрепленных фигур.
Описание чертежей
Фигура 1 показывает схематичное профильное изображение летательного аппарата с оптимизированной конфигурацией двигателей согласно настоящему изобретению.
Фигура 2 показывает схематичное изображение увеличения фигуры 1 вокруг отверстия фюзеляжа летательного аппарата с оптимизированной конфигурацией двигателей согласно настоящему изобретению.
Фигура 3 показывает схематичное изображение увеличения фигуры 2 вокруг поворотной области летательного аппарата с оптимизированной конфигурацией двигателей согласно настоящему изобретению.
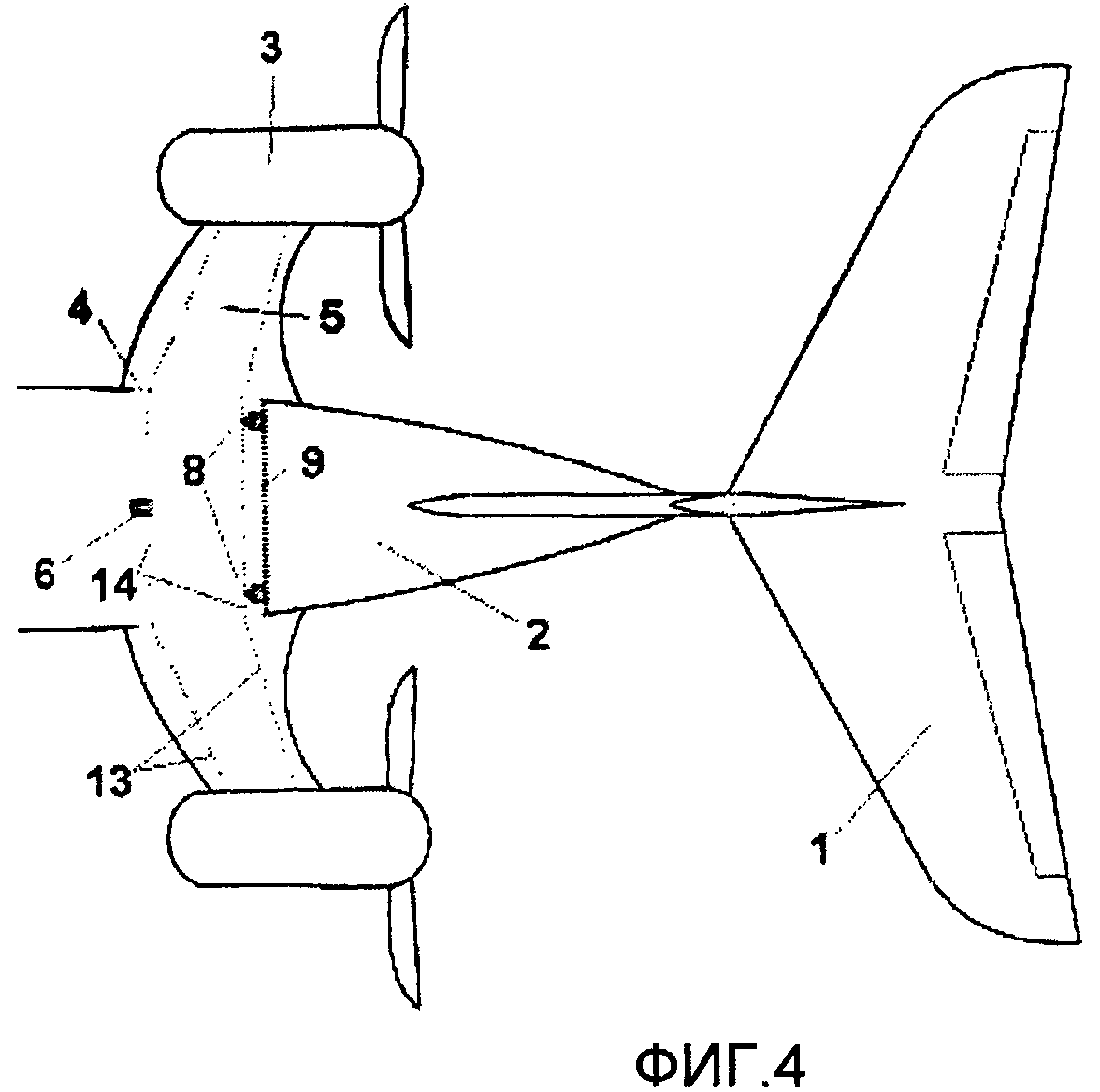
Фигура 4 показывает схематичный вид сверху летательного аппарата с оптимизированной конфигурацией двигателей согласно настоящему изобретению.
Фигура 5 показывает схематичное изображение увеличения фигуры 4 вокруг центральной кессонной конструкции летательного аппарата с оптимизированной конфигурацией двигателей согласно настоящему изобретению.
Подробное описание изобретения
Как видно на фигурах 1 и 4, которые соответствуют изображениям в профиль и сверху летательного аппарата с оптимизированной конфигурацией двигателей согласно настоящему изобретению, цель изобретения состоит в том, чтобы предоставить систему, которая обеспечивает возможность изменения угла атаки сборного узла группы пилон-двигатель летательного аппарата для конфигураций самолетов с двигателями, расположенными в задней части фюзеляжа 2. Данное изменение угла выброса выхлопных газов в соплах двигателей 3 предоставит возможность направления тяги таким образом, что она может действовать на летательный аппарат, обеспечивая моменты тангажа, подходящие для каждой фазы полета.
Фигура 1 показывает схематичное профильное изображение летательного аппарата с оптимизированной конфигурацией двигателей согласно изобретению, включающей в себя горизонтальный стабилизатор 1, двигатели 3, расположенные в задней части фюзеляжа 2, и отверстие 4 в фюзеляже, предоставляющее возможность прохода подвесных пилонов 5 для двигателей. Данная фигура также изображает соединительные детали поворотной области 8, прицепленные к каркасу 9 задней части фюзеляжа, и соединительную деталь 6 для крепления силового привода 7, предпочтительно силового привода 7 с червячной передачей. Сборный узел, образованный соединительной деталью 6 и червячной передачей 7, обеспечивает возможность балансировки сборного узла группы пилон-двигатель летательного аппарата посредством поворотной области 8.
Фигура 2 показывает схематичное изображение увеличения фигуры 1 вокруг отверстия 4 фюзеляжа летательного аппарата с оптимизированной конфигурацией двигателей согласно изобретению. На указанной фигуре можно подробно увидеть, что поворотная область 8 образована соединительной деталью 11, прикрепленной к сборному узлу пилон-двигатель, и соединительной деталью 12, прикрепленной к каркасу 9 задней части фюзеляжа. Крепление соединительных деталей 11 и 12 образует поворотный вал 10. Кроме того, лучше видны силовой привод 7 с червячной передачей 7 и его соединение с узлом пилона посредством соединительной детали 6. Другими словами, триммирование сборного узла группы пилон-двигатель достигается посредством воздействия на червячную передачу 7, добиваясь, тем самым, требуемого отклонения вектора тяги. Движение, вызываемое в пилоне летательного аппарата на его передней стороне в результате действия червячной передачи 7, поглощается задней стороной пилона в результате степени свободы, предоставляемой поворотным валом 10. Поскольку поворотный вал 10 расположен перпендикулярно вертикальной плоскости летательного аппарата, это может гарантировать, что балансировка сборного узла группы пилон-двигатель и, следовательно, составляющей отклонения вектора тяги двигателей относительно продольной оси летательного аппарата всегда сохраняется внутри плоскостей, параллельных вертикальной плоскости.
Фигура 3 показывает схематичное изображение увеличения фигуры 2 вокруг поворотной области 8 летательного аппарата с оптимизированной конфигурацией двигателей согласно изобретению. Более подробно можно увидеть конфигурацию образующих ее элементов, т.е. соединительную деталь 11 и ее крепление к сборному узлу пилона 5 и соединительную деталь 12 с ее креплением к каркасу 9 задней части фюзеляжа, а также крепление между ними, образующее поворотный вал 10.
Фигура 4 показывает схематичный вид сверху летательного аппарата с оптимизированной конфигурацией двигателей согласно изобретению, включающей в себя горизонтальный стабилизатор 1, двигатели 3, расположенные в задней части фюзеляжа 2, и отверстие 4 в фюзеляже, предоставляющее возможность прохода подвесных пилонов 5 для двигателей. Также нарисованы стрингеры 13 пилона и центральная или кессонная конструкция 14, которую располагают поперек фюзеляжа 2 и используют для крепления пилонов 5. Также нарисованы соединительные детали поворотной области 8, которые крепят к каркасу 9 задней части фюзеляжа 2, и соединительная деталь 6 для крепления силового привода с червячной передачей.
С объяснением предыдущих фигур и вида сверху летательного аппарата фигуры 4, можно увидеть, как обеспечивается, что отклонение вектора тяги имеет одну и ту же направленность у обоих двигателей 3. Результатом указанной особенности является улучшение управляемости системы балансировки, предложенной в изобретении по сравнению с известным предыдущим уровнем техники. Тот факт, что червячная передача расположена на перпендикуляре к продольной оси летательного аппарата, а центральная или кессонная конструкция 14 в горизонтальной плоскости или в плоскости, параллельной к ней, с прикреплением к каркасу 9 посредством симметричных соединительных деталей, образующих поворотную область 8, обеспечивает, что составляющая силы тяги отклоняется под углом внутри плоскостей, параллельных вертикали летательного аппарата.
Фигура 5 показывает схематичное изображение увеличения фигуры 4 вокруг центральной или кессонной конструкции 14. На данной фигуре нарисован силовой привод 7 с червячной передачей 7 и его крепление к сборному узлу, образованному пилонами 5 и центральной или кессонной конструкцией 14, посредством соединительной детали 6. Также можно видеть каркас 9 фюзеляжа, к которому прикреплены соединительные детали 12, и соединительные детали 11 для крепления к центральной или кессонной конструкции 14, а также поворотный вал 10.
Как можно видеть на фигуре 4, а более подробно на фигуре 5, пилоны 5 летательного аппарата, которые имеют неподвижное крепление к двигателям 3, равным образом прикреплены друг к другу посредством конструкции, образованной их каркасами 13 и кессонной конструкции 14. Вследствие этого, все вместе данные элементы образуют жесткое твердое тело. Балансировка данного жесткого твердого тела в любое время обеспечивает отклонение вектора тяги с угловым перемещением относительно продольной оси самолета без перемещения его оси вращения, оставляя вертикальную плоскость летательного аппарата. Данное перемещение достигается посредством поворотной области 8, которая образована симметричными соединительными деталями 11, прикрепленными неподвижным образом к кессонной конструкции 14, и симметричными соединительными деталями 12, прикрепленными неподвижным образом к каркасу 9, и соединение которых образует поворотный вал 10, перпендикулярный продольной оси самолета и внутри плоскости, параллельной горизонтали, и соединительной детали 6, используемой для соединения кессонной конструкции 14 и червячной передачи 7. Системы управления летательного аппарата для каждой фазы полета будут обеспечивать подходящий угол тяги посредством приведения в действие червячной передачи 7, которая посредством соединительной детали 6 будет изменять положение жесткого твердого тела, образованного пилонами и двигателями при поворачивании вокруг вала 10. Поскольку сборный узел, образованный пилонами и группами двигателей, действует, как единая конструкция, поворачивающаяся с уточненными особенностями вокруг вала 10, это обеспечивает, что вектор тяги двигателей является идентичным и управляемым. В данном процессе не будет затрагиваться внутренняя конструкция обычных двигателей гражданского летательного аппарата, имеющихся в настоящее время на рынке, а в хвостовом оперении будет использована широко испытанная система балансировки.
Как объяснялось ранее, объединенное действие пилонов 5 и возможность направлять выхлопные газы двигателей 3 будет обеспечивать момент тангажа либо за счет действия в качестве аэродинамической поверхности управления в первом случае, или являясь причиной тяги во втором случае, что будет оказывать очень положительное влияние при конструировании меньшего и, вследствие этого, более легкого горизонтального стабилизатора 1. Для летательного аппарата с фюзеляжем 2 заднего типа, включающем в себя сборный узел, образованный пилонами 5 и двигателями 3, разница между включением или нет предложенной системы балансировки будет представлять собой возможность уменьшения размера пилонов и двигателей в результате оптимизации их положения и, вследствие этого, такого его эффекта на каждой фазе полета, что аэродинамическая поверхность, необходимая в подвесных пилонах, будет меньше, и будет уменьшаться тяговая мощность двигателей. Улучшенная энергоемкость для более легкой конструкции и для двигателей с меньшими тяговыми требованиями очевидна.
Модификации, содержащиеся в пределах объема правовых притязаний, определенного следующей формулой изобретения, могут быть внесены в предпочтительные варианты осуществления, которые были только что описаны.
Реферат
Изобретение относится к области авиации, более конкретно к конфигурации установки двигателей для летательного аппарата. Двигатели расположены в задней части фюзеляжа (2) летательного аппарата, причем двигатели (3) прикреплены неподвижным образом пилонами (5) к конструкции летательного аппарата, при этом указанная конструкция включает в себя кессонную конструкцию (14), которую располагают поперек фюзеляжа (2) и используют для крепления пилонов (5). Фюзеляж (2) содержит отверстие (4), предоставляющее возможность прохода подвесных пилонов (5) для двигателей (3), при этом указанная конфигурация дополнительно включает поворотную область (8), силовой привод (7) и соединительную деталь (6), посредством которой силовой привод (7) крепят к подвесным пилонам (5) и к кессонной конструкции (14) летательного аппарата. Сборный узел, образованный силовым приводом (7) и соединительной деталью (6), предоставляет возможность балансировки сборного узла пилонов (5) и двигателей (3) летательного аппарата посредством поворотной области (8), добиваясь, таким образом, управляемого и оптимального отклонения вектора тяги летательного аппарата для каждой фазы полета. Технический результат заключается в повышении управляемости летательного аппарата и упрощении конструкции установки двигателей. 9 з.п. ф-лы, 5 ил.
Комментарии