Устройство электромеханического привода аэродинамической поверхности самолета - RU2442721C1
Код документа: RU2442721C1
Чертежи




Описание
Изобретение относится к системам управления аэродинамических поверхностей (руля направления, элерона и др.) самолетов.
Известны изобретения, относящиеся к системам управления самолетов (патенты US №6827311 от 07.04.2003, US №7007897 от 22.06.2004, ЕР №1964771 от 26.02.2008). Система управления каждым аэродинамическим элементом включает гидравлический (или пневматический) и электромеханический приводы. Недостаток такой системы управления - использование на самолете для управления аэродинамической поверхностью как минимум двух систем генерирования и распределения энергии - электрической и гидравлической (или пневматической) систем, оснащенных аналогичными по функциональному назначению устройствами.
Известно изобретение системы электромеханического привода управляемой аэродинамической поверхности самолета (патент US №4575027 от 16.05.1983) (прототип), включающей управляемую аэродинамическую поверхность, присоединенную к неподвижной относительно фюзеляжа аэродинамической поверхности с возможностью вращения; первый и второй электромеханические приводы, установленные соосно между неподвижной относительно фюзеляжа и управляемой аэродинамической поверхностью, каждый из которых состоит из корпуса с размещенным внутри электродвигателем и расположенного соосно электродвигателю редуктора с выходным вращающимся звеном, соединенным с управляемой аэродинамической поверхностью; средства аварийного разъединения управляемой и неподвижной относительно фюзеляжа аэродинамических поверхностей для обеспечения вращения управляемой аэродинамической поверхности.
Недостаток известной системы электромеханического привода в ее больших габаритах и массе и сложной конструкции соединения электромеханического привода с аэродинамической поверхностью.
Известен силовой минипривод (патент RU №2321138 от 10.01.2007; заявка WO №2008/085082 А1 от 12.07.2007), состоящий из узлов, расположенных концентрично относительно центральной оси: корпуса с цилиндрической и торцевыми частями, электродвигателя, имеющего статор и закрепленный на валу ротор; двухступенчатой волновой передачи с входным валом, имеющим эксцентрично расположенные поверхности, соединенным с ротором электродвигателя; сепаратора первой ступени волновой передачи с размещенными в нем в несколько рядов телами качения, перемещаемыми рабочими дисками относительно волнообразователя в жестком колесе, имеющем на внешней части эксцентрично расположенные поверхности; второй сепаратор с размещенными в нем в несколько рядов телами качения, перемещаемыми кольцами, надетыми на эксцентрично расположенные на жестком колесе поверхности, относительно второго волнообразователя, имеющегося на внутренней поверхности цилиндрической части корпуса электромеханической передачи; выходного вала, опирающегося на тела качения и подшипники качения; узлов, обеспечивающих управление работой электромеханического привода: стопорного устройства, статор которого с двумя парами постоянных магнитов и обмоток жестко соединен с корпусом, а якорь через стопор кинематически связан с валом ротора электродвигателя; расположенного между стопорным устройством и электродвигателем датчика положения ротора электродвигателя, жестко соединенного с его валом; датчика положения выходного вала, размещенного так, что его статор крепится к неподвижно закрепленной детали второй ступени волновой передачи, а ротор - к подвижной детали, соединенной с выходным валом.
Недостаток силового минипривода в большой инерционности полого ротора большого диаметра, внутри которого размещен эксцентриковый узел, часть сепаратора и часть жесткого колеса первой ступени волнового редуктора. Этот недостаток ограничивает величину ускорения ротора при допустимых потерях в двигателе (потери в меди) и не позволяет обеспечить повышенную управляемость объектов, приводимых электромеханическим приводом. Кроме того, силовой минипривод не имеет аварийного разъединителя выходного вала и приводимого им объекта.
Известен пиропатрон системы катапультирования, используемой в авиационной технике (патент RU №2230211 от 14.10.2002), имеющий корпус с твердотопливными шашками, петарду из прессованного пороха, капсюль-воспламенитель. В изобретении устройства (патент RU №2116094 от 11.02.1997) автоматического включения установки для воспламенения пиропатрона используется узел электрического пуска, работающий от электрических сигналов датчиков или от дистанционного управления.
Техническая задача, решаемая полезной моделью - снижение массы и габаритов устройства электромеханического привода и упрощение конструкции его соединения с управляемым объектом.
Техническая задача решена в устройстве электромеханического привода аэродинамической поверхности самолета, имеющем управляемую аэродинамическую поверхность, присоединенную к неподвижной относительно фюзеляжа аэродинамической поверхности с возможностью вращения; первый и второй электромеханические приводы, установленные соосно между неподвижной относительно фюзеляжа и управляемой аэродинамическими поверхностями, каждый из которых состоит из корпуса с размещенным внутри электродвигателем и расположенного соосно электродвигателю редуктора с выходным вращающимся звеном, соединенным с управляемой аэродинамической поверхностью; средства аварийного разъединения управляемой и неподвижной относительно фюзеляжа аэродинамическими поверхностями для обеспечения вращения управляемой аэродинамической поверхности, при этом каждый электромеханический привод имеет неподвижный корпус, закрепленный на неподвижной относительно фюзеляжа аэродинамической поверхности, редуктором в электромеханическом приводе является двухступенчатая волновая передача, вращающееся звено которой в виде выходного полого вала с фланцем закреплено на управляемой аэродинамической поверхности, так что ось вращения управляемой аэродинамической поверхности совмещена с осями вращения первого и второго электромеханических приводов, а средства аварийного разъединения управляемой и неподвижной относительно фюзеляжа аэродинамических поверхностей размещены осесимметрично в выходном полом валу электромеханического привода.
Для уменьшения массы электромеханический привод состоит из узлов, расположенных концентрично относительно центральной оси: корпуса с цилиндрической и торцевыми частями, неподвижно закрепляемого на неподвижной относительно фюзеляжа аэродинамической поверхности, электродвигателя, имеющего статор и закрепленный на валу ротор, расположенные внутри второй ступени; двухступенчатой волновой передачи с присоединенным к ротору электродвигателя входным валом, имеющим эксцентриковый узел с эксцентрично расположенными поверхностями; сепаратора первой ступени волновой передачи с размещенными в нем в несколько рядов телами качения, перемещаемыми установленными на эксцентрично расположенных поверхностях рабочими дисками относительно волнообразователя в жестком колесе первой ступени, которое имеет на внешней части эксцентрично расположенные поверхности для второй ступени; сепаратор второй ступени с размещенными в нем в несколько рядов телами качения, перемещаемыми кольцами, установленными на эксцентрично расположенных на жестком колесе поверхностях, относительно второго волнообразователя на внутренней поверхности цилиндрической части корпуса; выходного вала, опирающегося на тела качения и подшипники качения, который имеет шлицы на внутренней поверхности, а также продолжение в виде полой ступицы с закрепленным на ней фланцем, соединенным с приводимым объектом; на части внутренней поверхности ступицы имеется шлицевая поверхность, совпадающая с внутренней шлицевой поверхностью выходного вала; внутри шлицевого вала и части ступицы установлен шлицевой стакан, внутри которого имеется сминаемая спираль, присоединенная ко дну стакана; внутри ступицы установлено устройство выталкивания шлицевого стакана из шлицевой части ступицы; узлов, обеспечивающих управление работой электромеханического привода: стопорного устройства, статор которого с двумя парами постоянных магнитов и обмоток жестко соединен с корпусом, а якорь через стопор кинематически связан с валом ротора электродвигателя; расположенного между стопорным устройством и электродвигателем датчика положения ротора электродвигателя, соединенного с его валом; датчика положения выходного вала, размещенного так, что его статор крепится к неподвижно закрепленной детали второй ступени волновой передачи, а ротор - к подвижной детали, соединенной с выходным валом.
Устройство выталкивания шлицевого стакана может быть электромагнитным, но для снижения его массы устройство выталкивания шлицевого стакана из шлицевой части ступицы имеет пиропатрон с пиротехническим зарядом и электрическим инициатором горения пиротехнического заряда.
Для существенного уменьшения момента инерции ротора при заданном крутящем моменте электродвигателя отношение длины статора к его внутреннему диаметру находится в интервале 1-2.
Для повышения равномерности работы волновой передачи количество эксцентрично расположенных поверхностей является четным, при этом оси смежных поверхностей смещены в противоположные направления от центральной оси.
Для значительного увеличения крутящего момента на выходном валу электромеханического привода при частоте вращения ротора электродвигателя 5000-25000 мин-1 передаточное отношение двухступенчатой волновой передачи находится в интервале 500-2500.
Технический эффект - снижение массы и габаритов устройства электромеханического привода и упрощение конструкции его соединения с управляемым объектом - достигается за счет дополнительной совокупности признаков устройства - каждый электромеханический привод имеет неподвижный корпус, закрепленный на неподвижной относительно фюзеляжа аэродинамической поверхности; редуктором в электромеханическом приводе является двухступенчатая волновая передача, вращающееся звено которой выполнено в виде выходного полого вала с фланцем, закрепленным на управляемой аэродинамической поверхности так, что ось вращения управляемой аэродинамической поверхности совмещена с осями вращения первого и второго электромеханических приводов, а средства аварийного разъединения управляемой и неподвижной относительно фюзеляжа аэродинамических поверхностей размещены осесимметрично в выходном полом валу электромеханического привода.
Дополнительный эффект - уменьшение массы электромеханического привода - достигается за счет использования электромеханического привода со встроенной двухступенчатой волновой передачей, в выходном валу которой расположены средства аварийного разъединения электромеханического привода и управляемой аэродинамической поверхности. Для снижения массы средство аварийного разъединения включает устройство выталкивания шлицевого стакана из шлицевой части ступицы, имеющее пиропатрон с пиротехническим зарядом и электрическим инициатором горения пиротехнического заряда.
Данная совокупность признаков электромеханической передачи, обеспечивающая технический эффект, не обнаружена при проведении патентно-информационных исследований. Следовательно, изобретение соответствует критерию «новизна».
Предложенное техническое решение не следует явно из известного и проанализированного уровня техники, поэтому оно соответствует критерию «изобретательский уровень».
На фиг.1 показана конструкция устройства электромеханического привода аэродинамической поверхности самолета.
На фиг.2 - вариант размещения электромеханического привода в устройстве.
На фиг.3 - вид А на крепление электромеханического привода к аэродинамическим поверхностям самолета.
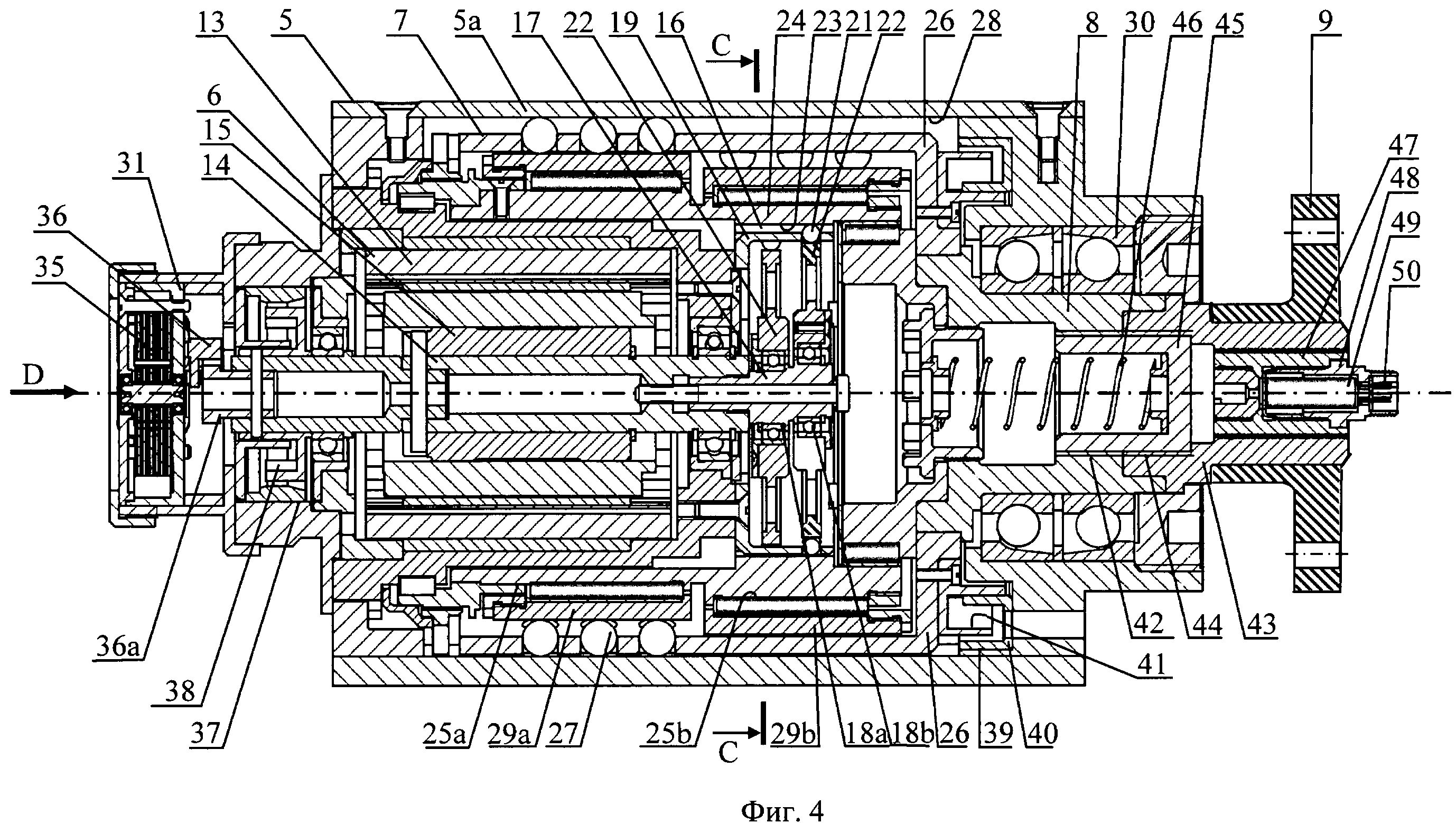
На фиг.4 - сечение В-В на фиг.1.
На фиг.5 - сечение С-С на фиг.4.
На фиг.6 - вид D на фиг.4
Устройство электромеханического привода аэродинамической поверхности самолета (фиг.1-6) имеет управляемую аэродинамическую поверхность 1, присоединенную с возможностью вращения относительно оси 1а к неподвижной относительно фюзеляжа аэродинамической поверхности 2; первый электромеханический привод 3 и второй электромеханический привод 4 установлены соосно между аэродинамической поверхностью 2 и управляемой аэродинамической поверхностью 1, а ось вращения управляемой аэродинамической поверхности 1 совмещена с осями вращения выходных звеньев первого электромеханического привода 3 и второго электромеханического привода 4; каждый электромеханический привод состоит из корпуса 5 с цилиндрической частью 5а с размещенным внутри электродвигателем 6 (фиг.4, 5, 6) и расположенной соосно с электродвигателем 6 двухступенчатой волновой передачи 7 с выходным полым валом 8 и фланцем 9 на нем, соединенным кронштейном 10 (фиг.1-3) с управляемой аэродинамической поверхностью 1, а корпус 5 соединен кронштейнами 11а и 11b с аэродинамической поверхностью 2; средства 12 аварийного разъединения (фиг.4) части каждого электромеханического привода, соединенной с электродвигателем 6, и части каждого электромеханического привода, соединенной с аэродинамической поверхностью 1, размещенные осесимметрично в выходном полом валу 8.
Для существенного уменьшения массы устройства электромеханический привод состоит из (фиг.4, 5, 6) расположенных концентрично относительно центральной оси деталей: корпуса 5 с цилиндрической частью 5 а, электродвигателя 6, имеющего статор 13 и закрепленный на валу 14 ротор 15; первой ступени 16 двухступенчатой волновой передачи 7 с входным валом 17, имеющим эксцентрично расположенные поверхности 18а и 18b, соединенным с ротором 15 электродвигателя 6; сепаратора 19 первой ступени 16 волновой передачи 7 с размещенными в нем в несколько рядов телами качения 21, перемещаемыми рабочими дисками 22 относительно волнообразователя 23 в жестком колесе 24, имеющем на внешней части эксцентрично расположенные поверхности 25а и 25b; второй сепаратор 26 с размещенными в нем в несколько рядов телами качения 27, перемещаемыми относительно второго волнообразователя 28 на внутренней поверхности цилиндрической части 5а корпуса 5 кольцами 29а и 29b, надетыми на эксцентрично расположенные на жестком колесе 24 поверхности 25а и 25b; выходного вала 8, опирающегося на тела качения 27 и подшипники качения 30, с фланцем 9, присоединяемым к объекту регулирования; узлов, обеспечивающих управление работой электромеханического привода: стопорного устройства 31, статор 32 (фиг.6) которого с двумя парами постоянных магнитов 33 с обмотками 34 жестко соединен с корпусом 5, а якорь 35 через стопор 36 (фиг.4) кинематически связан с валом 14; расположенного между стопорным устройством 31 и электродвигателем 6 датчика 37 положения ротора 15 электродвигателя 6, ротор 38 которого жестко соединен с валом 14; датчика 39 положения выходного вала 8, размещенного так, что его статор 40 крепится к детали корпуса 5, а ротор 41 - к детали, соединенной с выходным валом 8.
Для уменьшения момента инерции ротора 15 электродвигатель 6 расположен внутри жесткого колеса 24; поверхности 18а и 18b первой ступени 16 расположены вне ротора 15 электродвигателя 6; выходной вал 8 присоединен к сепаратору 26, является полым и имеет внутри шлицевую поверхность 42, а также продолжение в виде полой ступицы 43 с закрепленным на ней фланцем 9, соединенным с управляемой аэродинамической поверхностью 1; на части внутренней поверхности ступицы 43 имеется шлицевая поверхность 44, совпадающая с шлицевой поверхностью 42 выходного вала 8; внутри выходного вала 8 и части ступицы 43 установлен шлицевой стакан 45, внутри которого имеется сминаемая спираль 46, присоединенная к дну стакана 45; внутри ступицы 43 установлено устройство 47 выталкивания шлицевого стакана 45 из шлицевой поверхности 44 ступицы 43.
Для уменьшения момента инерции и массы ротора 15 и вала 14 электродвигателя 6 соотношение длины статора 13 и его внутреннего диаметра находится в интервале 1-2.
Для существенного увеличения крутящего момента при больших оборотах ротора 15 электродвигателя 6 (5000-25000 мин-1) двухступенчатый волновой редуктор имеет передаточное отношение 500-2500.
При передаточном отношении менее 500 обеспечение электродвигателем требуемого крутящего момента достигается при таком значении тока, при котором происходит усиленный нагрев электродвигателя вследствие тепловых потерь, выделяемых в обмотке. При передаточном отношении более 2500 необходима высокая частота вращения ротора электродвигателя, превышающая 25000 мин-1, при которой на ротор действуют значительные нагрузки от центробежных сил.
Для быстрого разъединения электромеханического привода 3 или 4, нагруженного максимальным расчетным крутящим моментом, и управляемой аэродинамической поверхности 1 при отказе электродвигателя 6, блока управления (не показан) датчика 37 положения ротора, датчика 39 положения выходного вала или заклинивании двухступенчатой волновой передачи 7, средства 12 аварийного разъединения выходного вала 8 электромеханического привода 3 или 4 и управляемой аэродинамической поверхности 1 в полость выходного вала помещен пиропатрон 48 (фиг.4) с пиротехническим зарядом 49 и электрическим инициатором 50 горения пиротехнического заряда 49.
При включении электромеханического привода 3 и 4 подается напряжение на пару обмоток 34 статора 32 стопорного устройства 31, якорь 35 поворачивается, разрывая кинематическую связь стопора 36 с зубчатым колесом 36а, соединенным с валом 14, и, таким образом, высвобождает вал 14. Якорь 35 фиксируется в этом положении постоянными магнитами 33 после снятия напряжения с обмоток статора 32 стопорного устройства 31. Блок управления электромеханического привода (не показан) на основе командного сигнала, сигналов с сигнальных обмоток датчика 39, положения выходного вала 8 и датчика 37 положения ротора 15 электродвигателя 6 приводит в движение ротор 15, вал 14 и соединенный с ним входной вал 17. При вращении входного вала 17 вращаются эксцентрично расположению поверхностей 18а и 18b и диски 22. Сепаратор 19 позволяет телам качения 21 перемещаться только в радиальном направлении, совершая волнообразные движения с периодом, равным периоду вращения входного вала 17, и амплитудой, равной удвоенному эксцентриситету поверхностей 18а и 18b. Тела качения 21, взаимодействуя с профилированной поверхностью волнообразователя 23 жесткого колеса 24, поворачивают его на угол, меньший угла поворота входного вала 17 в число раз, равное числу волн на поверхности волнообразователя 23 жесткого колеса 24.
Поворот жесткого колеса 24 приводит в движение выполненные на нем эксцентрично расположенные поверхности 25а и 25b. Тела качения 27 перемещаются в гнездах сепаратора 26 под действием колец 29а и 29b в радиальном направлении, совершая сложное движение, являющееся совокупностью вращательного движения сепаратора 26 и радиального движения с амплитудой, равной удвоенному эксцентриситету поверхностей 25а или 25b. Тела качения 27, взаимодействуя с поверхностью второго волнообразователя 28, закрепленного неподвижно, поворачивают сепаратор 26 на угол, меньший угла поворота жесткого колеса 24 в число раз, на единицу меньшее числа волн на поверхности второго волнообразователя 28.
Вместе с сепаратором 26 поворачивается выходной вал 8, шлицевой стакан 45 и ступица 43, находящиеся с ним в зацеплении. Сминаемая спираль 46, установленная с натягом внутри шлицевого стакана 45, прижимает стакан 45 к внутреннему торцу ступицы 43. Таким образом, вращение сепаратора 26 передается на выходной вал 8.
При отключении электромеханической передачи подается напряжение на пару обмоток 34 (фиг.6) статора 32 стопорного устройства 31, якорь 35 поворачивается в исходное положение, обеспечивая кинематическую связь стопора 36 с валом 14, и фиксирует вал 14 ротора 15. Якорь 35 фиксируется в исходном положении постоянными магнитами 33 после снятия напряжения с обмоток 34 статора 32 стопорного устройства 31.
Для отключения электромеханической передачи от объекта регулирования при отказе электродвигателя 6 блока управления (не показан), датчика 37 положения ротора, датчика 39 положения выходного вала 8 или заклинивании двухступенчатой волновой передачи 16, блок анализа состояния привода (не показан) подает сигнал на включение электрического инициатора 50 для воспламенения пиротехнического заряда 49 пиропатрона 48; возникающее при горении заряда 49 давление газа действует на дно шлицевого стакана 45 и создает силу, превышающую силу сжатия сминаемой спирали 46 и силу трения стакана 45 при его движении внутри выходного вала 8; спираль 46 сначала упруго, а затем пластически деформируется; стакан 45, перемещаясь, выходит из зацепления со ступицей 43, которая вместе с фланцем и управляемой аэродинамической поверхностью 1 может поворачиваться относительно выходного вала 8. После выгорания пиротехнического заряда 49 и выхода отработавшего газа деформированная спираль 46 не восстанавливается и стакан 45 остается внутри выходного вала 8.
Реферат
Изобретение относится к области авиации, более конкретно к системам управления аэродинамических поверхностей самолетов. Устройство электромеханического привода имеет управляемую аэродинамическую поверхность, присоединенную к неподвижной относительно фюзеляжа аэродинамической поверхности с возможностью вращения, первый и второй электромеханические приводы, установленные соосно между неподвижной относительно фюзеляжа и управляемой аэродинамической поверхностью. Каждый привод имеет неподвижный корпус, закрепленный на неподвижной относительно фюзеляжа аэродинамической поверхности. Редуктором в приводе является двухступенчатая волновая передача, вращающееся звено которой выполнено в виде выходного полого вала с фланцем, закрепленным на управляемой аэродинамической поверхности так, что ось вращения управляемой аэродинамической поверхности совмещена с осями вращения первого и второго электромеханических приводов. Средства аварийного разъединения размещены осесимметрично в выходном полом валу электромеханического привода. Технический результат заключается в снижении массы и уменьшении габаритов устройства электромеханического привода. 2 з.п. ф-лы, 6 ил.
Комментарии