Летательный аппарат - RU2624760C1
Код документа: RU2624760C1
Чертежи



Описание
Настоящее изобретение касается авиационной техники, а именно посадочных устройств летательных аппаратов, в первую очередь самолетов. Изобретение относится к рубрике В64С 25/28 ΜΠК.
Известны технические решения, аналогичные предлагаемому, как, например, «Кинестетическое устройство управления двигателем самолета», описанное в патенте РФ №2114029 от 03.07.1997. Данное устройство предназначено для использования в составе ЭДСУ и содержит рычаг управления, электромеханическую следящую систему с электродвигателем, отличающееся тем, что содержит кистевые рычаги управления правым и левым двигателями, прикрепленные к основанию с возможностью вращения, подлокотник, жестко соединенный с основанием с возможностью перемещения вдоль направляющих стержней шаговым электродвигателем, который через ведущий вал и червячное зацепление соединен с подлокотником, датчик текущего положения подлокотника и концевой датчик положения подлокотника, устройство гидродемпфирования движения кистевых рычагов, датчик положения кистевых рычагов, четырехпозиционный переключатель режимов работы, кнопку фиксации положения подлокотника, переключатель "включено" и блок управления перемещением подлокотника, который имеет вход для приема сигналов о текущих параметрах полета, а также входы для соединения с переключателем режимов работы, кнопкой фиксации положения подлокотника, переключателем "включено", датчиком углового положения кистевых рычагов, датчиком текущего положения подлокотника, концевыми датчиками положения подлокотника и выход для соединения с шаговым электродвигателем.
Действие предложенного устройства основано на передаче летчику кинестетической информации об одном из выбранных параметров полета, что может положительно сказаться на качестве выполнения летчиком полетного задания, поскольку кинестетические обратные связи не загружают дополнительной работой зрительный анализатор, который в полете часто оказывается хронически перегруженным из-за обилия информации.
Недостатком данного устройства является передача на один и тот же передатчик кинестетического сигнала - в данном случае, на подвижный подлокотник, различной по своей сути информации, так что пилот всегда должен помнить, в каком положении находится переключатель системы, а это может быть чревато его дезориентацией и принятием неверного решения.
Кроме того, при работе в посадочном режиме данная система передает пилоту только информацию об изменении посадочной скорости и никак не помогает ему непосредственно в процессе приземления самолета.
Известен также параплан, содержащий купол, подвесную систему, а также основные и управляющие стропы. Будучи самым легким летательным аппаратом тяжелее воздуха, параплан, тем не менее, обладает достаточно высоким аэродинамическим качеством - порядка 10, что позволяет парить в течение длительного времени в восходящих потоках воздуха. Характерной особенностью параплана, равно как и парашюта-крыла, является техника выполнения посадки, при которой пилот в процессе выдерживания при помощи натяжения управляющих строп гасит горизонтальную скорость аппарата до 10-15 км/ч, после чего встречает набегающую землю ногами, делая пробежку. Таким образом, ноги пилота в данном случае выполняют функцию шасси, что делает процесс максимально интуитивным и органичным.
Основным недостатком параплана является довольно высокий уровень травматизма и большое число смертельных случаев, вызванных особенностями пилотирования и отсутствием защиты пилота конструкцией аппарата.
Известен также самолет DA 42 «Twin Star», производимый компанией Diamond Aircraft, описание которого приводится, в частности, в методическом руководстве «Конструкция и летная эксплуатация самолета DA42 Twin Star», Корнеев В.M. Ульяновск, 2011 г. Данный летательный аппарат наиболее близок к предложенному изобретению и содержит планер, на котором установлены силовая установка, система управления в каналах крена, тангажа и рыскания, пост управления с педалями и шасси, выполненное в виде, как минимум, двух поперечно расположенных основных опор. Данный самолет обладает классической для современной легкомоторной авиации конструкцией шасси и системы управления, что делает его наиболее близким аналогом предложенного изобретения.
В отличие от описанного выше параплана, одним из недостатков классического легкомоторного самолета с колесным шасси зачастую является недостаточно ясное восприятие летчиком момента отделения аппарата от ВПП и приземления на нее. Тем временем, безопасность всего полета во многом определяется в эти краткие моменты, поскольку действия летчика на земле и в воздухе сильно различаются, и только предельно ясное и однозначное ощущение процесса перехода аппарата из одной среды в другую позволяет летчику вовремя перейти на новый алгоритм действий. К сожалению, для того, чтобы буквально до десятой доли секунды почувствовать момент отрыва или приземления летательного аппарата, а также уловить развивающуюся в этом процессе асимметрию, нужен довольно большой летный опыт, и сделать это тем сложнее, чем совершеннее амортизация шасси и ровнее покрытие ВПП.
Таким образом, при разработке данной конструкции ЛА была поставлена задача сделать восприятие летчиком процессов отделения ЛА от ВПП и приземления сравнимым по отчетливости с приземлением на собственные ноги за счет объединения посадочных устройств и органов управления в единую систему, обладающую возможностью передачи на ноги летчика информации о положении основных опор шасси, по аналогии с уже упомянутым «Кинестетическим устройством управления двигателем самолета».
Цель изобретения - улучшение качества пилотирования ЛА на режимах взлета и посадки, упрощение и ускорение обучения пилотов технике взлета и посадки, повышение безопасности полетов и потребительских свойств летательного аппарата, как рыночного продукта.
Для достижения поставленных целей в известную конструкцию летательного аппарата, содержащую планер, на котором установлены силовая установка, система управления в каналах крена, тангажа и рыскания, пост управления с педалями и шасси, выполненное в виде, как минимум, двух поперечно расположенных основных опор, были внесены следующие конструктивные изменения: летательный аппарат содержит средства отображения, конструктивно связанные с педалями и установленные с возможностью передачи на ноги летчика кинестетической информации об изменении положения опор шасси через перемещение педалей.
Кроме того, пост управления содержит главные гидроцилиндры, педали выполнены в виде педалей управления, каждая из которых состоит из основания и площадки, при этом площадки педалей управления установлены с возможностью качания относительно основания, главные гидроцилиндры установлены на основаниях педалей управления и кинематически связаны с площадками, каждая из опор шасси содержит колесо, стойку, поворотный рычаг, амортизатор, подкос, привод механизма уборки шасси, а также тормозной механизм колеса, включающий в себя рабочий гидроцилиндр, при этом средства отображения выполнены в виде гидроцилиндров обратной связи, рабочие полости гидроцилиндров обратной связи сообщаются с главными и рабочими гидроцилиндрами, один из концов гидроцилиндра обратной связи закреплен на поворотном рычаге опоры шасси, а второй - на планере, а положение точки крепления гидроцилиндра обратной связи на планере обеспечивает перемещение штока гидроцилиндра обратной связи в одном и том же направлении при уборке и обжатии основных опор шасси.
Кроме того, летательный аппарат содержит, как минимум, два актуатора обратной связи и блок управления, каждая из основных опор шасси содержит, по меньшей мере, один датчик положения, актуаторы обратной связи установлены на педалях управления с возможностью их перемещения при изменении положения колес шасси.
Устройство, согласно изобретению, иллюстрируется чертежами, на которых обозначено:
На Фиг. 1 - вид сбоку летательного аппарата.
На Фиг. 2 - кинематическая схема опоры шасси по П.2 Формулы.
На Фиг. 3 - кинематическая схема опоры шасси по П.3 Формулы
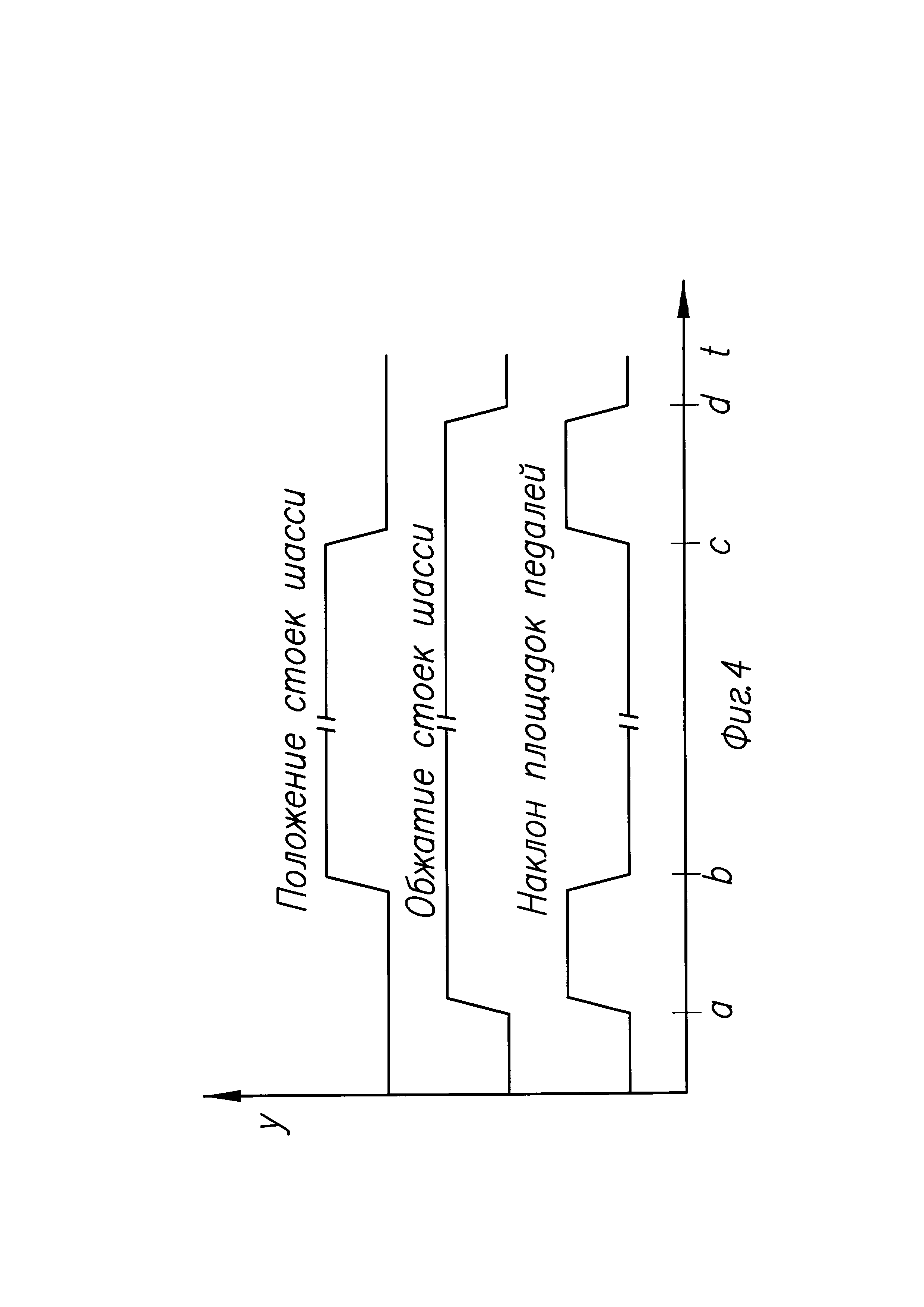
На Фиг. 4 - диаграмма работы устройства в процессе полета.
Летательный аппарат, согласно изобретению содержит планер, на котором установлена силовая установка (1), система управления (2) с педалями управления, каждая из которых состоит из площадки (3) и основания (4) шасси с двумя основными колесами (5) и носовым колесом (6) и тормозную систему с главными гидроцилиндрами (7) и рабочими гидроцилиндрами (8). Каждый из главных гидроцилиндров (7) установлен на основании (4) педали управления и кинематически связан с площадкой (3). Основные колеса (5) шасси установлены на опорах, каждая из которых включает в себя стойку (9), поворотный рычаг (10), амортизатор (11), подкос (12), привод механизма уборки шасси (13), а также тормозной механизм колеса (14), частью которого являются рабочие гидроцилиндры (8) и цилиндр обратной связи (15). При этом рабочая полость гидроцилиндра обратной связи (15) правой опоры шасси сообщается с главным гидроцилиндром (7), кинематически связанным с правой педалью управления, и рабочим гидроцилиндром (8) правой опоры шасси, рабочая полость гидроцилиндра обратной связи (15) левой опоры шасси сообщается с главным гидроцилиндром (7), кинематически связанным с левой педалью управления (6), и рабочими гидроцилиндрами (8) левой опоры шасси. Кроме того, один из концов каждого гидроцилиндра обратной связи (15) закреплен на поворотном рычаге (10) опоры шасси, а второй - на планере (1), а педали управления установлены с возможностью управления летательным аппаратом по рысканию.
Кроме того, летательный аппарат может содержать актуаторы обратной связи (16), блок управления (17) и датчики положения (18), при этом актуаторы обратной связи (16) кинематически связаны с педалями, перемещая их по команде блока управления (17), получающего информацию о положении основных колес (4) шасси и стоек (9) от установленных на них датчиков положения (18).
Рассмотрим работу предложенного устройства на различных этапах полета применительно для легкомоторного самолета.
1. При взлете, вырулив на исполнительный старт, летчик нажимает носками стоп на верхние части площадок (3) педалей управления, создавая тем самым давление в главных гидроцилиндрах (7), сообщающихся с рабочими гидроцилиндрами (8), которые зажимают тормозные механизмы колес шасси (14) и дают возможность вывести силовую установку (2) на требуемый уровень тяги при сохранении неподвижности самолета.
Разбег самолета по ВПП начинается при снятии тормозного усилия с верхних частей педалей управления. При достижении скорости отрыва от ВПП, летчик при помощи системы управления задает необходимый угол тангажа, что приводит к разжиманию амортизаторов (11), повороту поворотных рычагов (10) и смещению штоков гидроцилиндров обратной связи (15). Этот момент соответствует точке «а» на оси абсцисс диаграммы и приводит к опусканию (уходу от летчика) верхних частей педалей управления одновременно и пропорционально разжиманию амортизаторов (11). Этот процесс субъективно воспринимается летчиком как отрыв его ног от земли, что делает момент отрыва максимально понятным и повышает удобство пилотирования. Особенно сильно создаваемое предложенным устройством ощущение «отрыва ног от земли» помогает пилоту при взлете с боковым ветром, поскольку коррекцию возникающего крена можно начинать еще до полного отделения основных колес (5) от ВПП.
После взлета педали управления занимают отклоненное вперед положение (угол ϕ на чертеже), поскольку объем рабочей полости гидроцилиндров обратной связи (15) максимален при выпущенных опорах шасси и разжатых амортизаторах (11). Такое «неполетное» положение педалей управления является для летчика дополнительной сигнализацией выпущенного положения шасси, чем создает дополнительную предпосылку для его своевременной уборки.
2. При уборке шасси летчик включает в работу привод механизма уборки шасси (13), что приводит в движение стойки (9) и подкосы (12), убирая их внутрь планера. При этом, поскольку точка крепления гидроцилиндра обратной связи (15) на планере расположена вне плоскости качания поворотного рычага (10) опоры шасси, штоки гидроцилиндров обратной связи (15) в процессе уборки шасси при разжатых амортизаторах (11) смещаются в исходное положение, и гидравлическая жидкость, вытесняемая из гидроцилиндров обратной связи (15), попадая в главные гидроцилиндры (7), возвращает площадки (3) педалей управления в полетное положение («на летчика»), что субъективно ощущается как поджатие носков стоп внутрь кабины (точка b на оси абсцисс диаграммы). Кроме того, при возникновении затруднений в уборке шасси летчик распознает их по неадекватному движению педалей управления и может немедленно вернуть рычаг уборки шасси в исходное положение или поступить иначе в соответствии с РЛЭ данного типа самолета.
3. При выпуске шасси (точка «с» диаграммы) летчик не только может контролировать процесс по «уходу» носков стоп вперед, но и, благодаря наличию плеча между точкой крепления гидроцилиндра обратной связи (15) на планере (1) и осью качания стойки (9), нажим в процесс выпуска на педали управления может создать дополнительный вращающий момент на выпуск стоек (9) из-за повышения давления в гидроцилиндрах обратной связи (15), сообщающихся с главными гидроцилиндрами (7), что может быть полезно для успешного завершения процесса выпуска шасси.
Кроме того, наличие в норме кинестетического сигнала о выпуске шасси делает маловероятной случайную посадку с невыпущенным шасси даже на самолете, не оснащенном системой предупреждения о невыпуске шасси при посадке.
На посадке при касании основными колесами (5) ВПП, опоры шасси обжимаются, при этом сжимаются амортизаторы (11) и происходит вытеснение гидравлической жидкости из гидроцилиндров обратной связи (15), отражающееся в выходе педалей управления на летчика, что субъективно воспринимается им как приземление на носки собственных ног. При этом, поскольку сигнал о касании основных колес (4) поступает на носки стоп летчика раньше, чем происходит гашение остаточной вертикальной скорости самолета в амортизаторах (11), летчик при наличии соответствующего навыка может растянуть во времени процесс обжатия основных опор шасси, максимально снизив вертикальное ускорение при посадке самолета. Данная фаза работы устройства соответствует точке d диаграммы.
Также как и на взлете, при посадке с креном раннее информирование летчика об ассиметричном касании также помогает ему выровнять самолет и завершить процесс приземления наиболее эффективно.
Работа устройства согласно п. 3 Формулы на всех этапах полета происходит аналогично описанной выше конструкции, но при этом появляется возможность регулировки величины перемещения педалей управления за счет настройки блока управления (17) или отключения данной функции при необходимости.
Таким образом, благодаря введению в известную конструкцию летательного аппарата новых конструктивных признаков упрощается процесс пилотирования и уменьшается психофизиологическая нагрузка на летчика в наиболее напряженные моменты полета.
Реферат
Изобретение относится к летательным аппаратам. Летательный аппарат содержит планер, силовую установку, систему управления в каналах крена, тангажа и рыскания, пост управления с педалями и шасси, выполненное в виде как минимум двух опор. Летательный аппарат также содержит средства отображения, конструктивно связанные с педалями и установленные с возможностью передачи на ноги летчика кинестетической информации об изменении положения опор шасси через перемещение педалей. Пост управления содержит главные гидроцилиндры, а педали выполнены в виде педалей управления, каждая из которых состоит из основания и площадки. Главные гидроцилиндры установлены на основаниях педалей и кинематически связаны с площадками. Опора шасси содержит тормозной механизм (14) колеса (5), включающий в себя рабочий (8) гидроцилиндр. Cредства отображения выполнены в виде гидроцилиндров (15) обратной связи. Рабочие полости гидроцилиндров (15) обратной связи сообщаются с главными и рабочими (8) гидроцилиндрами. Один из концов гидроцилиндра (15) обратной связи закреплен на поворотном рычаге (10) опоры шасси, а второй - на планере. Изобретение улучшает пилотирование летательного аппарата, повышает безопасность полетов. 2 з.п. ф-лы, 4 ил.
Комментарии