Переключение между автопилотом и ручным управлением - RU2744833C2
Код документа: RU2744833C2
Чертежи







Описание
Область техники
Настоящее изобретение относится к области техники объединенных систем ручного управления и автопилота, в частности, к переключению между автопилотом и ручным управлением в устройстве рукоятки управления педалями руля направления, но считается, что оно также относится к любым другим областям, в которых необходимо пороговое значение сопротивления ручному перемещению элементов управления. Кроме того, изобретение относится к устройствам для позиционирования объектов и удержания их положения, в частности, в контексте систем автопилота.
Уровень техники настоящего изобретения
Из уровня техники известны объединенные системы автопилота и ручного управления для управления транспортными средствами, такими как автомобильные транспортные средства, поезда и самолеты. Управление с помощью автопилота, как правило, применяется в условиях крейсерского полета и может быть применимо, например, во время дальних полетов, когда пилот может сохранить свою концентрацию и внимание для более напряженных задач, таких как взлет и приземление. Ручное управление приберегается для сложных операций управления и для чрезвычайных ситуаций, когда управление переключается из режима автопилота в ручной режим даже в условиях крейсерского полета.
В условиях крейсерского полета при управлении с помощью автопилота самолет может просто лететь по прямой линии и, в таком случае, как известно, происходит блокировка тяг рулевого управления в нейтральное или центральное положение. Напротив, во время ручного управления необходимо свободное перемещение элемента управления, с возможностью некоторого поджима по направлению к центральному положению в некоторых элементах управления. Например, в случае педалей управления рулем направления применяется устройство рукоятки управления педалями руля направления для генерирования «усилия на рукоятке управления» или ответного усилия для поджима педали управления по направлению к центральному положению и, таким образом, обеспечения отклика «усилия на рукоятке управления» пилоту в ручном режиме. Данное усилие обычно составляет от 100 Н в точке предварительного натяжения до 300 Н при полном обороте и приводит к возможности самоцентрирования элемента управления, которое можно преодолеть с помощью усилия, приложенного пользователем. Желательно создать систему, которая может обеспечить оба вида управления и может быстро переключаться между ними.
Известные системы, как правило, блокируют тяги рулевого управления, например, педали управления рулем направления, когда работает режим автопилота. Путем блокировки тяг рулевого управления на месте и их обеспечения некоторым сопротивлением к приложенным усилиям непреднамеренное перемещение пользователем относительно тяг рулевого управления не прекратит работу автопилота. Однако, устанавливается такое пороговое значение, выше которого усилие, приложенное пользователем, будет переводить систему из работы автопилота обратно на ручное управление (т. е. данное пороговое значение считается точкой, выше которой приложенное усилие является не только преднамеренным, а скорее положительным решением пользователя).
В такой системе, когда усилие прилагается для перемещения тяг рулевого управления, то приложенное усилие функционально передается на ведущий угловой рычаг, который вызывает поворот ведущего вала и, таким образом, например, руля направления или другого рулевого устройства, тем самым осуществляя рулевое управление. «Усилие на рукоятке управления» может быть обычно предусмотрено за счет использования спиральной торсионной пружины, расположенной вокруг оси ведущего углового рычага. Когда угловой рычаг находится в центральном положении его дуги движения, упругая потенциальная энергия, хранящаяся в торсионной пружине, находится на минимальном уровне, в то время как, когда пользовательский элемент управления находится в любом крайнем положении его дуги движения, упругая потенциальная энергия, хранящаяся в торсионной пружине, находится на максимальном уровне. Таким образом, торсионная пружина обеспечивает восстанавливающее усилие/усилие на рукоятке управления для централизации пользовательского устройства управления.
Одной из систем, известных из уровня техники, для сопротивления движению ведущего углового рычага с целью блокировки рулевого устройства (например, руля направления) в центральном положении во время операции автопилота является предоставление второй спиральной торсионной пружины или «пружины автопилота» вокруг оси ведущего углового рычага. Пружина автопилота действует в дополнение к пружине «с усилием на рукоятке управления», описанной выше. Таким образом, в данных традиционных системах обе пружины сцеплены для обеспечения усилия, которое противостоит движению ведущего углового рычага при включенном управлении с помощью автопилота. В случае, когда пользователь желает неожиданно перейти на ручное управление при включенном автопилоте, то он или она должен/должна будет преодолеть усилие обеих пружин для перемещения элемента управления. Таким образом, усилие «предварительного натяжения» увеличивается (т. е. усилие для переключения между автопилотом и ручным управлением) по сравнению только с одной пружиной с усилием на рычаге.
Подобным образом, градиент увеличения противоположного усилия пружин во время движения элемента управления вдоль его дуги от центрального положения больше для обеих действующих пружин, чем для одной. Другими словами, усилие пружины, поджимающее элемент управления по направлению к центральному положению, возрастает быстрее с увеличением смещения элемента управления вдоль дуги с обеими действующими пружинами по сравнению с одной пружиной с усилием на рукоятке управления, действующей в одиночку.
В таких вариантах реализации с двумя пружинами, если пользователь перемещает элемент управления на предварительно определенную величину от центрального положения, или то же самое или в качестве альтернативы, прилагает усилие к элементу управления выше предварительно определенного усилия, то система выполнена с возможностью отсоединения пружины автопилота, тем самым выходя/пересиливая режим автопилота. Таким образом, система переходит к использованию одной пружины с усилием на рукоятке управления, т. е. на ручное управление. Соответственно, усилие, предусмотренное пружиной автопилота, никогда не используется полностью, поскольку пружина автопилота отсоединяется до того, как ведущий угловой рычаг достигает полного хода его дуги.
Еще одна система, известная из уровня техники, имеет спиральную торсионную пружину для обеспечения центрирующего поджимающего усилия на элементе управления во время управлении с помощью автопилота. Для переключения на ручное управление прекращается поджимающее усилие, и элемент управления может свободно перемещаться.
Еще одна система, которая известна из уровня техники, предусмотрена для обеспечения кулачка на том же ведущем валу, что и ведущий вал углового рычага. Кулачок оснащен непрерывной изогнутой поверхностью и центральным углублением. Движение ведущего углового рычага вокруг своей оси приводит к повороту ведущего вала и, следовательно, кулачка. Под управлением с помощью автопилота соленоид с якорем, перемещающийся в продольном направлении, прижимает рычажок, имеющий элемент, приводимый в движение кулачком, к поверхности кулачка. Элемент, приводимый в движение кулачком, сцепляется с центральным углублением, когда ведущий угловой рычаг находится в центральном положении. После сцепления кулачок блокируется в положении и, тем самым, ведущий угловой рычаг блокируется в положении от непреднамеренного перемещения пользователем относительно пользовательских элементов управления. Если пользователь пожелает вернуться к ручному управлению, спиральная торсионная пружина, предусмотренная вокруг оси рычажка, обеспечит некоторую свободу перемещения рычажка при приложении усилия выше порогового значения и, таким образом, элемент, приводимый в движение кулачком, может быть выведен из сцепления с углублением кулачка при приложении к ведущему угловому рычагу поворотного усилия выше порогового значения.
В такой системе в течение всего времени управления с помощью автопилота соленоид должен быть включен для удержания якоря в соленоиде и, тем самым, удержания рычажка и элемента, приводимого в движение кулачком, в положении. Так как управление с помощью автопилота может длиться в течение нескольких последующих часов, например 5-10 ч., соленоиду необходимо будет существенное количество электроэнергии в течение этого времени для поддержания режима автопилота.
Более того, для непреднамеренного перемещения пользователем, чтобы не отключить автопилот, в дополнение к спиральной торсионной пружине рычажка, имеющего жесткое расположение, также необходимо, чтобы соленоид не был легко выходящим, то есть якорь соленоида должен прочно удерживаться в соленоиде.
Для обеспечения усилия сопротивления против усилия, которое может быть столь же большим, как 300 Н или даже 500 Н, авторы настоящего изобретения попытались предоставить большой соленоид; однако одна из проблем касательного этого состоит в том, что такое устройство является громоздким и его сложно устанавливать с другими компонентами, необходимыми для самолета, и также, что необходимо существенно больше электроэнергии для удержания якоря внутри катушки соленоида.
Другим вариантом будет предоставление нескольких небольших соленоидов; однако, это не решает проблему количества потребляемой электроэнергии.
Самолет имеет ограниченный источник питания, и в любом случае желательно уменьшить количество используемой электроэнергии и массу самолета, а также упростить конструкцию элементов управления, расположенных в нем. Целью настоящего изобретения является обеспечение решения по меньшей мере некоторых из вышеуказанных задач.
Сущность изобретения
Согласно первому аспекту настоящего изобретения предусмотрено устройство для позиционирования и удержания положения, содержащее соленоид с якорем; и электромагнитный стабилизатор; причем соленоид выполнен с возможностью воздействия на позиционирование объекта при перемещении якоря; при этом электромагнитный стабилизатор выполнен с возможностью воздействия на удержание положения с целью удержания объекта в положении, спозиционированном соленоидом.
В некоторых вариантах реализации якорь функционально связан с объектом, таким образом, перемещение якоря изменяет положение объекта.
В некоторых вариантах реализации электромагнитный стабилизатор содержит электромагнит и полярную пластину, выполненную с возможностью движения относительно электромагнита; при этом электромагнитный стабилизатор удерживает объект в положении посредством электромагнитного взаимодействия между электромагнитом и полярной пластиной; причем необязательно, чтобы электромагнитный стабилизатор удерживал объект в положении посредством электромагнитного взаимодействия между электромагнитом и полярной пластиной при достаточно уменьшенном воздушном зазоре между ними.
В некоторых вариантах реализации полярная пластина выполнена с возможностью движения с якорем соленоида.
В некоторых вариантах реализации соленоид имеет катушку, внутри которой перемещается якорь, причем катушка прикреплена к опорной конструкции; при этом электромагнит прикреплен к опорной конструкции; причем полярная пластина выполнена с возможностью движения с якорем, таким образом перемещение якоря в соленоидной катушке вызывает движение полярной пластины по направлению к электромагниту или от него.
В некоторых вариантах реализации якорь выполнен с возможностью линейного перемещения внутрь катушки и из нее; соленоид дополнительно содержит поджимающую пружину, вызывающую выход якоря за пределы катушки; и полярная пластина функционально связана с дистальным концом якоря; устройство выполнено таким образом, что при подключенном соленоиде ток проходит через катушку, якорь втягивается в катушку с преодолением силы поджима пружины, и воздушный зазор уменьшается; при подключенном электромагните и уменьшенном воздушном зазоре электромагнит и пластина притягиваются и удерживаются вместе силами, генерируемыми электромагнитным полем между ними; и при удерживании электромагнита и полярной пластины на месте посредством притяжения, усилие между ними является большим, чем поджимающее усилие пружины соленоида, таким образом, при отключении соленоида, сила притяжения электромагнитного стабилизатора предотвращает осуществление выхода якоря соленоида за счет пружины соленоида.
В настоящем изобретении также предусмотрено устройство для переключения между авиационным автопилотом и ручным усилием на рукоятке управления, содержащее механизм автопилота и устройство для позиционирования и удержания положения, как описано выше, причем устройство для позиционирования и удержания положения выполнено с возможностью позиционирования механизма автопилота и удержания его положения.
В некоторых вариантах реализации механизм автопилота содержит ролик; устройство содержит кулачок; соленоид выполнен с возможностью позиционирования ролика для сцепления с кулачком, и электромагнитный стабилизатор выполнен с возможностью удержания сцепленного положения ролика с кулачком.
В некоторых вариантах реализации устройство дополнительно содержит опору; ведущий угловой рычаг, связанный с валом, причем вал поддерживается опорой с возможностью поворота; при этом кулачок сцеплен с валом, таким образом препятствие повороту кулачка препятствует повороту вала и, тем самым, ведущего углового рычага, причем кулачок содержит: контактную поверхность; и углубление в контактной поверхности; причем механизм автопилота дополнительно содержит коромысло и скобу; при этом устройство выполнено таким образом, что втягивание якоря сдвигает механизм автопилота, таким образом коромысло прижимает ролик к контактной поверхности кулачка и вводит в углубление кулачка, тем самым сцепляя кулачок, препятствуя дальнейшему повороту кулачка и, следовательно, препятствуя повороту ведущего углового рычага; причем полярная пластина и дистальный конец якоря прикреплены к скобе, таким образом втягивание якоря перемещает скобу и, тем самым, полярную пластину, таким образом воздушный зазор уменьшается и электромагнит и пластина удерживаются вместе электромагнитной силой.
В некоторых вариантах реализации механизм автопилота дополнительно содержит вал коромысла, поддерживаемый опорой с возможностью поворота, причем вал коромысла проходит через опору, коромысло и скобу; спиральную торсионную пружину коромысла, расположенную вокруг вала коромысла и присоединенную к скобе и коромыслу для сопротивления относительному кручению между ними; и упор коромысла, присоединенный к коромыслу и выполненный с возможностью контакта со скобой для удержания минимального расстояния между ними и предотвращения поворота за определенную точку; при этом устройство выполнено таким образом, что пружина коромысла является предварительно натянутой посредством регулировочного винта на скобе для закручивания спиральной торсионной пружины коромысла, и такое натяжение удерживается упором коромысла, который предотвращает раскручивание пружины коромысла посредством предотвращения поворота коромысла далее по направлению к скобе.
В некоторых вариантах реализации устройство может быть выполнено таким образом, что выход и втягивание якоря обеспечивает усилие на скобе, причем усилие имеет компонент, перпендикулярный радиальной линии, проходящей от вала коромысла в точке, к которой приложено усилие; при этом приложенное усилие обеспечивает момент, который вызывает поворот скобы и механизма автопилота.
В некоторых вариантах реализации поворот узла скобы происходит из расцепленного положения кулачка и ролика в направлении сцепленного положения кулачка и ролика; или поворот узла скобы происходит из сцепленного положения кулачка и ролика в направлении расцепленного положения кулачка и ролика.
В некоторых вариантах реализации приложенное усилие обеспечивает момент, который вызывает запирание скобы в сцепленном положении, так что она способна противостоять реактивному крутящему моменту упора, причем необязательно, чтобы при сцеплении и удержании электромагнитным стабилизатором, источник электропитания соленоида мог быть отключен для уменьшения потребления электроэнергии.
В некоторых вариантах реализации усилие ниже предварительно определенного порогового значения, приложенное к угловому рычагу в любом направлении его траекторий движения, не будет вызывать смещение ролика из углубления кулачка; причем необязательно, чтобы пороговое значение составляло 300 Н, или причем, чтобы пороговое значение составляло 500 Н.
В некоторых вариантах реализации усилие выше порогового значения будет вызывать смещение ролика из углубления кулачка посредством поворота коромысла относительно скобы вокруг вала коромысла, таким образом упор коромысла удаляется от и теряет контакт со скобой; при этом электромагнитный стабилизатор все еще будет в сцеплении с пластиной, удерживаемой в контакте с электромагнитом; причем ролик будет продолжать прижиматься к боковой поверхности кулачка до отключения электромагнита; при этом необязательно, чтобы при отключенном электромагните и все еще отключенном соленоиде, электромагнитная сила уже не противодействовала поджимающему усилию пружины соленоида, которая затем вызывает выход якоря из катушки и, таким образом, узла скобы, подлежащего повороту, таким образом ролик отодвигается от и теряет контакт с поверхностью кулачка.
В некоторых вариантах реализации устройство дополнительно содержит устройство рукоятки управления, содержащее торсионную пружину, расположенную вокруг ведущего вала, выполненную с возможностью приложения центрирующего крутящего момента для поджима ведущего углового рычага к центральному положению, причем необязательно, чтобы торсионная пружина была в постоянном сцеплении для обеспечения центрирующего усилия.
В некоторых вариантах реализации вал коромысла имеет эксцентрическую часть, со смещением оси от оси оставшейся части вала коромысла; при этом коромысло установлено с возможностью поворота на эксцентрической части вала коромысла; причем устройство дополнительно содержит регулируемый упор коромысла для управления дугой, по которой может поворачиваться коромысло; при этом эксцентрическая часть вала коромысла поворачивается для выравнивания ролика по углублению кулачка, в случае нахождения системы с усилием на рукоятке управления в центральном положении; при том, что упор коромысла регулируется для обеспечения желаемого диапазона движения коромысла по его дуге поворота вокруг эксцентрической оси вала.
В другом аспекте в настоящем изобретении предусмотрен способ переключения между автопилотом и ручным управлением в самолете, причем сцепление автопилота включает: перемещение механизма автопилота в предварительно определенное положение посредством перемещения якоря, присоединенного к механизму автопилота, через катушку соленоида; и удержание механизма автопилота в предварительно определенном положении с помощью электромагнитного стабилизатора, содержащего полярную пластину, присоединенную к механизму автопилота, которая приводится в контакт с электромагнитом, когда механизм автопилота находится в предварительно определенном положении; при этом механизм автопилота содержит ролик, который сцепляется с углублением в кулачке, когда механизм автопилота находится в предварительно определенном положении; причем кулачок закреплен для поворота с ведущим валом, к которому прикреплен ведущий угловой рычаг для поворота; и при этом переключение на ручное управление включает приложение усилия к ведущему угловому рычагу, так что ролик механизма автопилота вытесняется из углубления кулачка таким образом, что ведущий вал может свободно поворачиваться.
Краткое описание графических материалов
Предпочтительные варианты реализации настоящего изобретения будут теперь описаны только посредством примера и со ссылкой на прилагаемые графические материалы, на которых:
на фиг. 1 проиллюстрирован изометрический вид варианта реализации настоящего изобретения в первой ориентации Декартовой системы координат, на котором показан втянутый якорь соленоида и кулачок, блокированный механизмом автопилота в условиях управления с помощью автопилота;
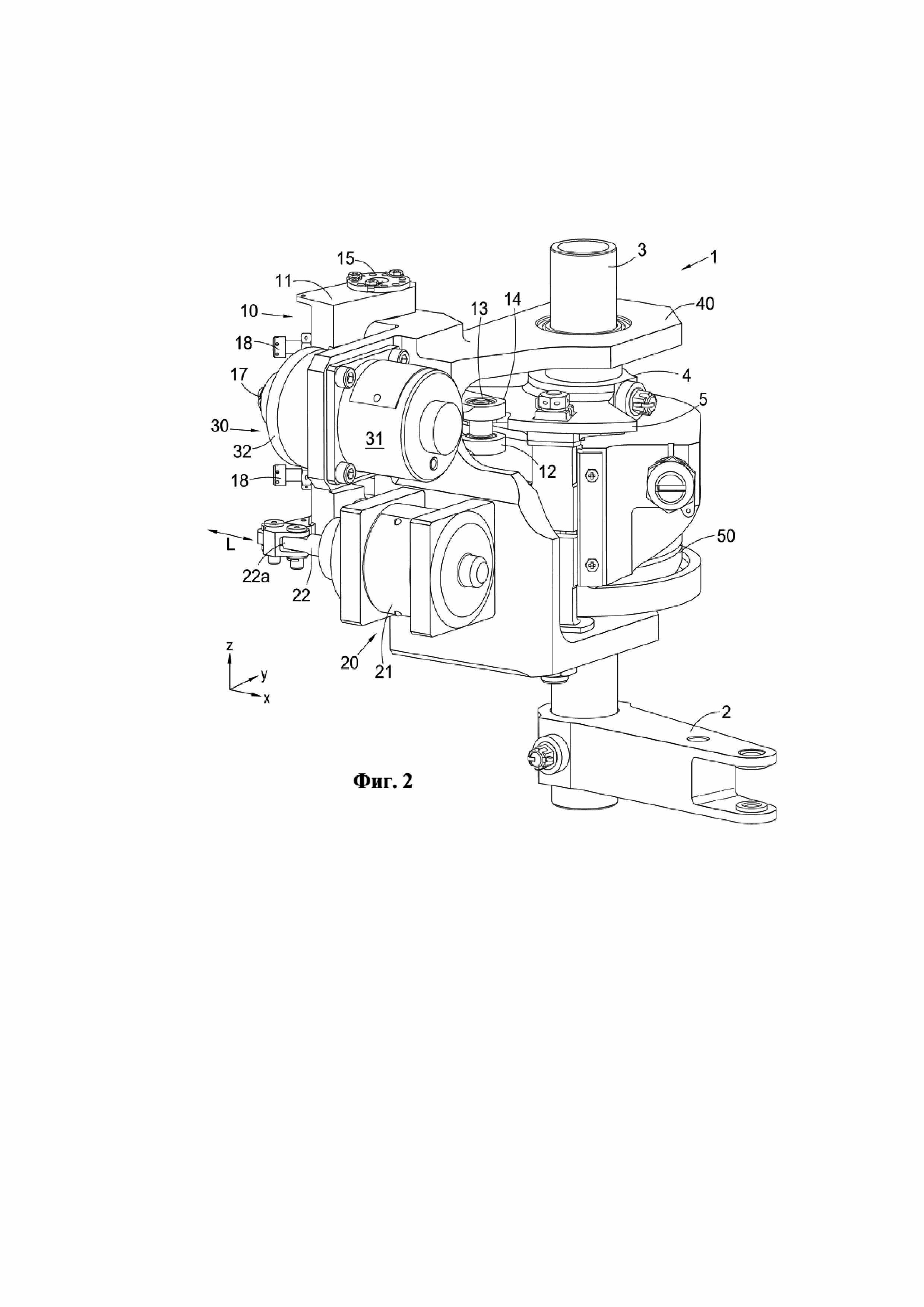
на фиг. 2 проиллюстрирован вариант реализации по фиг. 1, но показывающий проходящий якорь соленоида и кулачок, который может свободно поворачиваться в условиях ручного управления;
на фиг. 3 проиллюстрирован изометрический вид варианта реализации по фиг. 1 во второй ориентации Декартовой системы координат (вращаемый на 90 градусов против часовой стрелки вокруг оси Z по сравнению с первой ориентацией), на котором показано положение управления с помощью автопилота по фиг. 1;
на фиг. 4 проиллюстрирован вариант реализации по фиг. 3, но на котором показан проходящий якорь соленоида и кулачок, который может свободно поворачиваться в условиях ручного управления, как показано также на фиг. 2;
на фиг. 5 проиллюстрирован изометрический вид варианта реализации по фиг. 1 в третьей ориентации Декартовой системы координат (вращаемый на 180 градусов вокруг оси Z по сравнению с первой ориентацией), на котором показано положение управления с помощью автопилота втянутого соленоида по фиг. 1 и ролика кулачка, сцепленного с углублением кулачка;
на фиг. 6 проиллюстрирован вариант реализации по фиг. 5, на котором показано условие перевода на ручное управление, в котором якорь соленоида втягивается, но ведущий угловой рычаг может поворачиваться и ролик кулачка уже не сцеплен с углублением кулачка;
на фиг. 7 представлен увеличенный частичный изометрический вид во второй ориентации фиксирующей сборки, как показано на всех вышеуказанных фигурах;
на фиг. 8 проиллюстрирован изометрический отдельный вид вала коромысла фиксирующей сборки, имеющей эксцентрическую центральную часть;
на фиг. 9 проиллюстрирован альтернативный профиль кулачка согласно другому варианту реализации; и
на фиг. 10a и 10b проиллюстрирован профиль кулачка варианта реализации по фиг. 1-8 и варианта реализации по фиг. 9, соответственно.
Подробное описание изобретения
На фиг. 1 проиллюстрировано устройство 1 для переключения между авиационным автопилотом и ручным управлением согласно варианту реализации настоящего изобретения, которое содержит устройство для позиционирования и удержания положения. Устройство может представлять собой узел рукоятки управления, например, выполненный как часть механизма управления с помощью педалей управления рулем направления, например, устройства рукоятки управления педалями руля направления.
Данное устройство для переключения между авиационным автопилотом и ручным управлением предусматривает обеспечение режима автопилота посредством сцепления механизма автопилота, который размещен и имеет свое положение, удерживаемое на протяжении режима автопилота устройством для позиционирования и удержания положения, содержащим соленоид и электромагнитный стабилизатор. Устройство дополнительно обеспечивает переключение, осуществляемое пользователем, из режима автопилота на ручной режим посредством выведения из сцепления механизма автопилота.
Устройство 1 содержит ведущий угловой рычаг 2, функционально связанный с одним концом пользовательского элемента управления вводом, такого как педаль управления или ручка рулевого управления (не показаны), и другим концом, функционально связанным с ведущим валом 3, содержащим кулачок 4, неподвижно прикрепленный к нему. Кулачок 4 содержит непрерывную изогнутую поверхность 5, имеющую углубление («захват») 9. Форма данного углубления 9 и изогнутой поверхности 5 влияет на усилие на рукоятке управления/восстанавливающее усилие, предусмотренное в режиме автопилота, как рассмотрено более подробно далее. Движение углового рычага 2 поворачивает ведущий вал 3 и, таким образом, кулачок 4. Напротив, блокировка кулачка 4 обеспечивает блокировку ведущего вала 3 и, таким образом, углового рычага 2. Ведущий вал 3 поддерживается для поворота с помощью фиксированного корпуса или опоры 40 устройства 1.
Предусмотрен механизм 10 автопилота, проиллюстрированный в увеличенном виде на фиг. 7, который содержит скобу 11, неподвижно прикрепленную к валу 15 коромысла, которая содержит коромысло 12, прикрепленное к ней с возможностью поворота. Коромысло 12 прикреплено к эксцентрической части 15b вала 15 коромысла (см. фиг. 8), которая имеет ось B со смещением от оси A оставшейся части 15a вала 15 коромысла. Коромысло 12 содержит элемент, приводимый в движение кулачком, или ролик 13 на конце 14 коромысла 12, отдаленного от вала 15 коромысла. Механизм 10 автопилота дополнительно содержит спиральную торсионную пружину или пружину 16 коромысла вокруг вала 15 коромысла, причем пружина 16 коромысла может обеспечить способный к сопротивлению крутящий момент между коромыслом 12 и скобой 11 вокруг вала 15 коромысла.
Пружина 16 коромысла является предварительно натянутой, таким образом она отклоняет коромысло 12 для поворота в направлении против часовой стрелки вокруг вала 15 коромысла при рассмотрении сверху (т. е. при рассмотрении в отрицательном направлении Z). Предварительное натяжение или предварительная нагрузка предусмотрены двумя винтами 18 на скобе 11. Посредством данной предварительной нагрузки, приложенной к пружине 16 коромысла путем использования двух винтов 18, происходит установка крутящего момента пружины. Упор 17 коромысла предусмотрен на коромысле 12 для контакта со скобой и предотвращения поворота коромысла в направлении против часовой стрелки, достаточном для высвобождения предварительного натяжения в пружине 16 коромысла. Следовательно, в отсутствие приложенных усилий к механизму 10 автопилота коромысло 12 остается в зафиксированном положении относительно скобы 11, в котором упор 17 коромысла входит в контакт и отклоняется от скобы 11, тем самым уменьшая относительный поворот между коромыслом 12 и скобой 11, и, таким образом, уменьшая относительный поворот между коромыслом 12 и валом 15 коромысла, к которому неподвижно прикреплена скоба.
Вал 15 коромысла проходит через механизм 10 автопилота и поддерживается для поворота опорой 40 устройства 1.
Устройство для позиционирования и удержания положения содержит соленоид 20 и электромагнитный стабилизатор 31 и выполнено с возможностью позиционирования механизма 10 автопилота так, чтобы обеспечить режим автопилота или ручной режим, и удерживать его положение. Как описано ниже, соленоид вводится в сцепление с механизмом автопилота («сцепленная фаза»), тогда как электромагнитный стабилизатор удерживает его положение («блокирующая фаза»).
Якорь 22 втягивающего соленоида 20 присоединен к скобе 11 в положении, близком валу 15 коромысла. Втягивание якоря 22 втягивающего соленоида 20 обеспечивает усилие на скобе 11. Усилие имеет компонент в направлении, перпендикулярном радиальной линии от вала 15 коромысла в точке на скобе 11, в которой приложено усилие, и в окружном направлении против часовой стрелки вокруг вала 15 коромысла. Это вызывает момент направления против часовой стрелки, который поворачивает скобу 11 и, следовательно, механизм 10 автопилота (в том числе вал 15 коромысла) вокруг вала 15 коромысла относительно опоры 40, в направлении против часовой стрелки поворота при рассмотрении сверху (т. е. при рассмотрении в отрицательном направлении Z).
Следовательно, дистальный конец 14 коромысла 12 достигает поверхности 5 кулачка 4, и ролик 13 вводится в контакт с поверхностью 5 кулачка 4. При контакте ролика 13 с кулачком 4 предотвращается дальнейшее втягивание якоря 22, поскольку ролик 13 уже находится в контакте с поверхностью 5 кулачка. Механизм 10 автопилота не может поворачиваться дальше, поскольку ролик 13 не может перемещаться больше по направлению к поверхности 5 кулачка. Однако, в нейтральном положении, когда ролик 13 обращен к углублению 9 кулачка 4, происходит сцепление ролика 13 с углублением 9 кулачка 4. В данном положении механизм 10 автопилота может поворачиваться еще дальше по направлению к поверхности 5 кулачка во время сцепления ролика 13 с углублением 9 кулачка 4.
Втягивающий соленоид 20 содержит катушку 21, содержащую якорь 22, расположенный в ней. Якорь 22 выполнен с возможностью движения в продольном направлении L соленоида, т. е. выхода из катушки 21 или втягивания в катушку 21. При отключенном соленоиде 20 (т. е. когда ток не проходит через соленоид) якорь 22 отклоняется пружиной сжатия соленоида (не показана), так что он располагается в линейном направлении, по меньшей мере частично проходя наружу катушки 21 соленоида 20. При включенном соленоиде 20 магнитное поле, вызванное током в катушке 21, приводит к воздействию тяговым усилием на якорь 22. Усилие преодолевает поджимающее усилие пружины сжатия соленоида и приводит к втягиванию якоря 22 в продольном направлении в катушку 21.
Катушка 21 соленоида 20 прикреплена к опоре 40 устройства 1, тогда как якорь 22 прикреплен своим дистальным концом 22a к фиксирующей сборке 10 (в частности к скобе 11). Выход или втягивание якоря 22 соленоида приводит к повороту механизма 10 автопилота по часовой стрелке или против часовой стрелки, соответственно, вокруг вала 15 коромысла скобы 11 при рассмотрении сверху (т. е. при рассмотрении в отрицательном направлении Z) и, таким образом, приводит к движению дистального конца 14 коромысла 12 с роликом 13 по направлению к контактной поверхности 5 кулачка 4 или от нее.
Электромагнитный стабилизатор 30 содержит электромагнит 31 и полярную пластину 32. Электромагнит 31 неподвижно прикреплен к опоре 40 устройства 1 в месте, близком к катушке 21 соленоида 20. В некоторых вариантах реализации электромагнит 31 расположен смежно катушке 21 соленоида 20. Полярная пластина 32 электромагнитного стабилизатора 30 неподвижно прикреплена к скобе 11 фиксирующей сборки 10 в месте, близком к дистальному концу 22a якоря 22 соленоида 20. В некоторых вариантах реализации полярная пластина 32 расположена смежно дистальному концу 22a якоря 22. Таким образом, движение скобы 11 подразумевает одновременное движение как якоря 22, так и полярной пластины 32.
Втягивание якоря 22 в катушку 21 втягивает скобу 11 по направлению к катушке 21 и одновременно втягивает полярную пластину 32 по направлению к электромагниту 31. Выход якоря 22 из катушки 21 выталкивает скобу 11 из катушки 21 и одновременно выталкивает полярную пластину 32 из электромагнита 31.
При достижении полярной пластиной 32 электромагнита 31 воздушный зазор 33 между ними (т. е. разделительное расстояние между полярной пластиной и электромагнитом) уменьшается (см. фиг. 4). При движении полярной пластины 32 от электромагнита 31 воздушный зазор 33 между ними увеличивается.
Далее будет более подробно рассмотрена работа устройства.
Во время режима ручного управления системы соленоид 20 отключен. Как описано выше, якорь 22 проходит вследствие поджима пружины сжатия соленоида и толкает скобу 11, так что механизм 10 автопилота поворачивается по часовой стрелке вокруг оси вала 15 коромысла и ролик 13 движется от поверхности 5 кулачка 4. Кулачок 4 и, таким образом, ведущий угловой рычаг 2 затем могут поворачиваться либо с менее слабым поджимающим усилием, либо без него, в зависимости от того, представлена ли торсионная пружина 50 с усилием на рукоятке для ручного управления (как известно из уровня техники), расположенная вокруг ведущего вала 3. Таким образом, происходит отключение автопилота, так что пользователь может более легко перемещать угловой рычаг посредством пользовательского элемента управления вводом (например, руля направления), и, таким образом, может регулировать при желании систему рулевого управления. Другими словами, предусмотрено полное ручное управление.
Для переключения на режим автопилота включают соленоид 20 и якорь 22 втягивают с преодолением силы поджима пружины сжатия соленоида. Это вытягивает скобу 11 и приводит к повороту механизма 10 автопилота против часовой стрелки вместе с валом 15 коромысла вокруг вала 15 коромысла, таким образом, что ролик 13 прижимается и катится вдоль контактной поверхности 5 кулачка 4. Как было кратко описано выше и как будет описано более подробно далее, как только кулачок 4 и ролик 13 окажутся в нейтральном положении, таким образом, что ролик 13 обращен к углублению 9 кулачка, ролик 13 сцепляется с углублением 9. Таким образом, включается механизм автопилота, и обеспечивается режим автопилота. В данном режиме кулачок заблокирован в положении путем сцепления ролика 13 с углублением 9. Следовательно, ведущий вал 3 и, таким образом, угловой рычаг 2 заблокированы в положении. Таким образом, непреднамеренные усилия, приложенные пользователем (ниже порогового значения), не будут иметь никакого воздействия на рулевое управление.
Электромагнит электромагнитного стабилизатора может быть включен одновременно с соленоидом, или один может быть включен перед включением другого.
При втягивании якоря 22 в катушку 21, полярная пластина 32 приближается к электромагниту 31 (поскольку скоба 11 соединяет между собой якорь 22 и полярную пластину 32), таким образом, что воздушный зазор 33 между ними уменьшается. Так как сила электромагнитного поля обратно пропорциональна квадрату расстояния воздушного зазора, за счет существенного уменьшения воздушного зазора 33 можно получить сильное магнитное поле Е между электромагнитом 31 и полярной пластиной 32. Таким образом, при уменьшении воздушного зазора 33 ниже порогового значения электромагнитный стабилизатор 30 активируется таким образом, что электромагнит 31 притягивает полярную пластину 32 и удерживает ее на месте. Сцепленное положение механизма автопилота, как достигнуто посредством перемещения соленоида, тем самым, удерживается электромагнитным стабилизатором.
Таким образом, затем соленоид 20 может быть отключен, поскольку сила активированного электромагнитного стабилизатора 30 в достаточной мере удерживает положение механизма 10 автопилота в сцепленном положении. Следовательно, механизм 10 автопилота удерживается в положении с роликом 13, находящимся в контакте с поверхностью 5 кулачка 4, причем ролик находится в углублении 9, даже против максимального предварительно натянутого усилия торсионной пружины 16 коромысла. Более того, активированный электромагнитный стабилизатор 30 также удерживает якорь 22 соленоида 20 в отведенном положении с преодолением силы поджима пружины соленоида, так как усилие электромагнитного стабилизатора 30 больше усилия пружины соленоида. Это также способствует удержанию положения механизма 10 автопилота.
Ведущий угловой рычаг 2 имеет дугу движения 6, имеющего центральное положение 6c и две крайние точки 6а, 6b (см. фиг. 5). В каждой точке дуги движения 6 углового рычага 2 кулачок 4 поворачивается различное количество раз вокруг ведущего вала 3. Во время управления с помощью автопилота угловой рычаг 2 находится в центральном положении 6с. Это то же самое центральное положение, что и вызванное торсионной пружиной с усилием на рукоятке управления, как известно из уровня техники (не показано), действующее для централизации элемента управления вводом, т. е. углового рычага.
Точно так же, как кратко описано выше, при переходе на управление с помощью автопилота механизм 10 автопилота, в том числе вал 15 коромысла, поворачивается против часовой стрелки вокруг вала 15 коромысла. Торсионная пружина 16 коромысла, которая управляет относительным поворотом между коромыслом 12 и валом 15 коромысла, приводит по меньшей мере к начальному повороту коромысла с валом 15. Поскольку ролик 13 находится на дистальном конце 14 коромысла 12, поворот коромысла 12 приводит к движению ролика 13 по дугообразной траектории, до тех пор, пока валик 13 не выровнен правильно для вставки в углубление 9 кулачка.
Правильное позиционирование ролика 13 для обеспечения осуществления данного выравнивания осуществляется путем предварительного использования калибровки следующим образом. Поскольку часть вала 15 коромысла, на которой установлено коромысло 12 с возможностью поворота, имеет ось со смещением от оси оставшейся части вала 15 коромысла (см. фиг. 8), посредством поворота вала 15 коромысла относительно коромысла 12, конец коромысла 12, содержащий ролик 13, может быть постепенно отрегулирован, так что ролик 13 может быть идеально выровнен для вставки в углубление 9 кулачка 4. После установки правильно выровненного нейтрального положения вал 15 коромысла затем должен быть закреплен на месте (например, с использованием винтов или других крепежных средств) для поворота вместе с оставшейся частью фиксирующей сборки 10 с целью предотвращения изменения отрегулированного оптимального нейтрального положения.
Как только это сделано, упор 17 коромысла можно затем регулировать для управления длиной дуги, через которую коромысло 12 может двигаться при его повороте вокруг вала 15 коромысла, когда пользователь пытается отключить автопилот, выводя ролик 13 коромысла 12 из углубления 9 кулачка 4.
При удлинении упора 17 коромысла упор 17 коромысла вскоре будет контактировать со скобой 11 вдоль дуги поворота коромысла 12 вокруг вала 15 коромысла. Результатом слишком большого удлинения является то, что ролик 13 не будет должным образом контактировать с кулачком 4 и будет стоять в стороне от его поверхности. Таким образом, ролик 13 не будет должным образом сцепляться с углублением 9.
При укорачивании упора 17 коромысла упор 17 коромысла дальше будет контактировать со скобой 11 вдоль дуги поворота коромысла 12 вокруг вала 15 коромысла. Это обеспечивает глубокую посадку ролика 13 в углубление 9 кулачка 4.
Однако при слишком сильном укорачивании упора 17 коромысла ролик 13 может оставаться в контакте с углублением 9 кулачка 4, или он не будет в достаточной мере выходить из сцепления с кулачком 4 (кулачок имеет либо профиль захвата, либо профиль кулачка, либо другой, как рассмотрено далее ниже), даже после отключения электропитания к электромагнитному стабилизатору 30 и соленоиду 20.
Более того, при слишком сильном укорачивании упора коромысла и активации ручного управления не будет возможным в дальнейшем вести работу автопилота. Это происходит потому, что соленоид 20, который приводит полярную пластину 32 и электромагнит 31 в контакт друг с другом, не сможет преодолеть крутящий момент пружины 16 коромысла. Таким образом, величина, на которую упор 17 коромысла должен быть отрегулирован, очень важно для работы системы.
В данном выровненном нейтральном положении ролик 13 будет контактировать с конкретной точкой 7 на контактной поверхности 5 кулачка 4 (см. фиг. 6). Данная точка оснащена вогнутым углублением 9. Ролик 13, который отклонен по направлению к контактной поверхности 5 кулачка 4 пружиной 16 коромысла, толкающей коромысло 12 и скобу 11, проталкивается в углубление 9 и сцепляется с углублением 9. Это предотвращает возможность свободного поворота кулачка 4 вокруг ведущего вала 3. Поскольку как угловой рычаг 2, так и кулачок 4 прикреплены к ведущему валу 3, путем блокировки кулачка 4 для предотвращения движения кулачка 4, также предотвращается движение углового рычага 2. Таким образом, при сцеплении ролика 13 с углублением 9 кулачка 4 угловой рычаг 2 закрепляется в центральном положении 6с. Это приводит к тому, что кулачок 4 не может поворачиваться вокруг оси ведущего вала 3, и, таким образом, в этом режиме автопилота, как рулевое устройство, например, руль направления, так и ведущий угловой рычаг 2 (а также пользовательский элемент управления, с которым он функционально связан) удерживаются в центральном положении.
В случае возникновения чрезвычайной ситуации, когда пользователю необходимо внезапно вернуться из режима автопилота в режим ручного управления, пользователь может приложить большое усилие (выше порогового значения, как рассмотрено ниже) к пользовательскому элементу управления, такому как, например, педаль управления, руль или ручка управления. Пользовательский элемент управления функционально связан с угловым рычагом 2 и поэтому большое усилие передается на угловой рычаг 2, который прилагает крутящий момент к ведущему валу 3. В результате этого ролик 13 вынужден выкатиться из углубления 9 вдоль непрерывной изогнутой контактной поверхности 5 кулачка 4, в то время как электромагнитный стабилизатор 30 остается в закрытом положении, т. е., где воздушный зазор 33 равен нулю или близок к нулю, и электромагнит 31 и пластина 32 находятся в контакте друг с другом. Таким образом, ролик 13 принудительно выходит из сцепления из углубления 9 кулачка 4 посредством поворота коромысла 12 с преодолением силы поджима пружины 16 коромысла. При выведенном из сцепления ролике 13 кулачок 4 может свободно поворачиваться вокруг ведущего вала 3 посредством перемещения ведущего углового рычага 2.
В данной точке пользователь переходит на ручное управление системы (как рассмотрено выше), и автопилот следует отключить. Это отключит или дезактивирует электромагнитный стабилизатор 30 и обеспечит с помощью пружины сжатия соленоида 20 выход якоря 22 и, таким образом, поворот скобы 11 и механизма 10 автопилота по часовой стрелке вокруг вала 15 коромысла. Это приводит к движению ролика 13 от поверхности 5 кулачка 4 и предотвращает повторное сцепление ролика 13 с углублением 9 кулачка 4 при перемещении пользователем углового рычага 2 через центральное положение 6c во время работы режима ручного управления.
Углубление 9, ролик 13, поджимающее усилие пружины 16 коромысла и большее удерживающее усилие электромагнитного стабилизатора 30 выполнены таким образом, что во время режима автопилота только приложенные усилия к пользовательским элементам управления выше порогового значения, такого как 300 Н, предпочтительно выше 500 Н, могут смещать ролик 13 из углубления 9 в кулачке 4. Таким образом, непреднамеренное перемещение пользователем ограничено устройством 1, и ролик 13 не смещается из углубления 9 в кулачке 4.
Форма контактной поверхности 5 определяет профиль усилия на рукоятке управления, предусмотренный устройством во время режима автопилота (т. е. усилие на рукоятке управления, ощущаемое пользователем/восстанавливающее усилие). Таким образом, изменение формы контактной поверхности изменяет предусмотренный профиль усилия на рукоятке управления.
Вариант реализации, описанный выше, предусматривает кулачок 4, имеющий дугообразную контактную поверхность 5 и углубление 9, в которое ролик 13 может входить в сцепление и из которого ролик 13 может выходить из сцепления при достаточном повороте кулачка. Такой профиль с центральным углублением и цилиндрический профиль на любой стороне может быть назван как «профиль захвата». Это предусматривает усилие на рукоятке управления, только когда ролик находится в углублении и когда он выкатывается из него. Цилиндрическая форма на любой стороне не создает способное к сопротивлению усилие на рукоятке управления.
Альтернативная форма 5a контактной поверхности для кулачка 4a, который рассматривается, показана на фиг. 9. Данный профиль (может быть назван как «профиль кулачка») характеризуется склонами на обеих сторонах центрального углубления 9. Как можно увидеть, контактная поверхность 5a принимает очень волнообразную форму, которая может быть разработана для конкретной системы, в которой она будет предусмотрена. Глубокая впадина 9а в контактной поверхности и крутые стенки 9b могут быть выполнены для обеспечения того, что ролик 13, сцепленный с впадиной, не будет вытеснен из сцепления с кулачком на протяжении большей части, если не всего, хода, и, следовательно, будет генерировать усилие на протяжении большей части, если не всего, хода ведущего углового рычага. Таким образом, может быть предусмотрена система, в которой резкий возврат ручного режима становится еще более сложным или даже невозможным, до тех пор, пока автопилот не отключен. Более того, при повороте углового рычага склоны приводят к поднятию ролика 13, что создает «усилие на рукоятке управления». Данное «усилие на рукоятке управления» может быть сгенерировано при полном обороте углового рычага и характеристики «усилия на рукоятке управления» могут быть определены формой склона.
Соответственно, в данном альтернативном решении полный профиль кулачка не является явно эквивалентным очень глубокому углублению кулачка и, таким образом, плотному захвату для ролика. Наоборот, предусмотрено более гибкое решение, поскольку вместо простого линейного поджимающего усилия автопилота точная форма и конструкция кулачка могут обеспечить более сложные центрирующие усилия, например, путем обеспечения увеличивающихся градиентов вдоль поверхности кулачка из центрального положения. Таким образом, эффекты, вызываемые данным типом кулачка, могут быть настроены таким образом, чтобы быть подобными системе, имеющей две торсионные пружины вокруг углового рычага, где одна торсионная пружина обеспечивает постоянное усилие на рукоятке управления, а другая входит в сцепление во время работы автопилота для обеспечения дополнительного центрирующего усилия. Профиль, показанный на фиг. 9, представляет собой пример профиля кулачка, имеющего относительно крутые склоны, которые были бы полезными в сочетании с менее жесткой пружиной коромысла. Напротив, для менее жесткой пружины коромысла профиль кулачка может иметь более пологие склоны на любой стороне впадины.
На фиг. 10a и 10b представлены дополнительные виды кулачка 4 варианта реализации по фиг. 1-8 и кулачка 4a по фиг. 9, соответственно.
Конкретным преимуществом настоящего изобретения является то, что путем применения электромагнитного стабилизатора 30 для удержания положения механизма автопилота (а не соленоида, соленоид используется только для начального позиционирования), можно предусмотреть большее удерживающее усилие при потреблении намного меньшего количества тока, чем соленоид. Таким образом, путем отключения соленоида 20 в режиме автопилота и применения только электромагнитного стабилизатора 30 для удержания поджима ролика 13 к поверхности 5 кулачка 4 (тем самым блокируя угловой рычаг на месте) можно достигнуть существенного снижения потребления электроэнергии по сравнению с системой, в которой, например, применяют соленоид как для позиционирования, так и для дальнейшего удержания положения механизма автопилота. Это является особенно преимущественным во время длительных периодов в режиме автопилота, которые, как правило, длятся 10 часов или более.
Кроме того, нет необходимости в предоставлении большого соленоида, поскольку не соленоид 20 удерживает ролик 13, а электромагнитный стабилизатор 30. Поскольку электромагнитный стабилизатор 30 предусматривает высокое удерживающее усилие вследствие его сильного магнитного поля, объединенные компоненты соленоида 20 и электромагнитного стабилизатора 30 обеспечивают уменьшение размера устройства 1 и, таким образом, более легкое изготовление и установку, а также уменьшение массы в самолете.
Реферат
Группа изобретений относится к устройству для позиционирования механизма управления транспортного средства и удержания положения этого механизма, устройству и способу для переключения между авиационным автопилотом и ручным усилием на рукоятке управления. Устройство для позиционирования содержит соленоид с якорем, электромагнитный стабилизатор, причем электромагнитный стабилизатор содержит электромагнит и полярную пластину, выполненную определенным образом. Устройство для переключения содержит механизм автопилота и вышеуказанное устройство для позиционирования. Для переключения между автопилотом и ручным усилием на рукоятке управления перемещают механизм автопилота в определенное положение посредством перемещения якоря, удерживают механизм автопилота в этом положении определенным образом. Обеспечивается уменьшение массы транспортного средства и увеличение длительности использования автопилота при управлении транспортным средством. 3 н. и 17 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способы управления с помощью автопилота
Комментарии