Воздушный винт изменяемого шага и способ измерения углового положения его лопастей - RU2099242C1
Код документа: RU2099242C1
Чертежи



Описание
Изобретения относятся к авиационной технике и, в частности, к воздушным винтам изменяемого шага и способам, позволяющим определять текущие углы установки его лопастей в полете и на режимах наземного маневрирования самолета.
Наличие информации о текущем угле установки лопастей винта характеризует его как соответствующий современным требованиям по надежности работы и обеспечению безопасности полета самолета.
Выполнение этих требований становится возможным вследствие передачи информации
о
текущем угле установки лопастей в электронные средства управления винтом для обеспечения целого ряда функций:
поддержания с высокой точностью частоты вращения и синхрофазирования;
реализации всережимного следящего упора (безопасного полетного шага) с использованием цифрового электронного модуля;
обеспечения активного рабочего диагностирования функционирования винта и
системы управления и установления их ресурса по техническому состоянию и т. д.
Поэтому очень важно обеспечить измерение угла установки лопастей с высокой точностью.
Известен воздушный винт, содержащий гидромеханизм изменения углов установки лопастей с поршнем, скрепленным с механизмом обратной связи, и частотный датчик, расположенный на фланце редуктора
двигателя,
над токосъемником противообледенительной системы винта [1]
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного винта,
следует отнести
то, что в нем отсутствуют средства, позволяющие определять текущие углы установки лопастей с использованием частотного датчика, на работу которого к тому же будут влиять помехи от
искрения подвижных
контактов токосъемника.
Наиболее близким устройством того же назначения к заявляемому винту по совокупности признаков является воздушный винт, содержащий
гидромеханизм изменения углов
установки лопастей с поршнем, скрепленным с механизмом обратной связи, включающим маслоподающую бета-трубку, и взаимодействующий с ней линейный датчик углового положения
лопастей [2]
К
причинам, препятствующим достижению указанного ниже технического результата при использовании известного винта, принятого за прототип, следует отнести то, что в нем снижается
точность замера, которая
зависит от величины замеряемых перемещений маслоподающей бета-трубки.
Кроме этого, на каждый типоразмер винта требуется определенный линейный датчик, наличие которого увеличивает к тому же номенклатуру штатных датчиков в силовой установке. При этом узел линейного датчика, достаточно протяженный в осевом направлении, увеличивает длиновые габариты винта и силовой установки в целом.
Наиболее близким способом того же назначения к заявленному способу в группе изобретений по совокупности признаков является способ измерения углового положения
лопастей воздушного винта, в
котором посредством датчиков получают импульсные сигналы от взаимодействия с индукторами, один из которых кинематически связан с валом винта, а другой кинематически
связан с лопастями, направляют
импульсные сигналы в устройство обсчета для определения углового положения лопастей по фазовому смещению индукторов [3]
К причинам, препятствующим достижению
указанного ниже технического
результата при использовании известного способа, принятого за прототип, следует отнести то, что в нем затруднительно добиться высокой точности измерения, поскольку
индуктор, взаимодействующий со
вторым датчиком, кинематически связан с дифференциальным редуктором, размещенным в электромеханизме изменения шага лопастей. Пониженная точность измерения углового
положения лопастей в известном
способе вызвана наличием люфтов в подшипниках и передающих звеньях силового механизма дифференциального редуктора.
Единый технический результат, который может быть получен при осуществлении группы изобретений, заключается в повышении точности замера углового положения лопастей путем использования датчиков, взаимодействующих с индукторами, и устранения отрицательного влияния люфтов в передающих звеньях в линии замера, связанной с лопастью, а также ограничением диапазона измерений выбранным интервалом рабочих углов лопастей.
Указанный единый технический результат при осуществлении группы изобретений по объекту-устройство достигается тем, что в заявляемом воздушном винте, содержащем гидромеханизм изменения углов установки лопастей с поршнем, скрепленным с механизмом обратной связи, включающим маслоподающую бета-трубку и датчик углового положения лопастей, особенность заключается в том, что в него введены концентрично размещенные рессоры, взаимодействующие с маслоподающей бета-трубкой со стороны, противоположной поршню, с кинематическим обеспечением возможности указанного взаимодействия в выбранном интервале рабочих углов лопастей, при этом одна из рессор кинематически связана с маслоподающей бета-трубкой в осевом направлении, а другая рессора связана с маслоподающей бета-трубкой с возможностью углового смещения в окружном направлении относительно первой рессоры, обеспечиваемой винтовой парой, причем рессоры связаны между собой в окружном направлении через пружину и на рессорах размещены индукторы, взаимодействующие с датчиками для определения углового положения лопастей.
Указанный единый технический результат при осуществлении группы изобретений по объекту-способу достигается тем, что в заявляемом способе измерения углового положения лопастей воздушного винта, снабженного маслоподающей бета-трубкой, связанной с механизмом изменения шага лопастей, а также вращающимися индукторами и датчиками, заключающемся в том, что посредством датчиков получают импульсные сигналы от взаимодействия с индукторами, первый из которых кинематически связан с валом винта, а второй кинематически связан с лопастями, направляют импульсные сигналы в устройство обсчета для определения углового положения лопастей по фазовому смещению индукторов, особенность состоит в том, что вращение обоих индукторов осуществляют от маслоподающей бета-трубки, осевое поступательное движение которой используют для получения сказового смещения второго индуктора относительно первого, при этом в районе флюгерных углов прерывают осевую связь второго индуктора с лопастями.
Совокупность признаков, перечисленных в соответствии с формулой изобретения на воздушный винт и способ измерения, полностью обеспечивая достижение вышеизложенного технического результата, доказывает тем самым существенность этих признаков.
Заявляемая группа изобретений соответствует требованию единства изобретения, поскольку группа разнообъектных изобретений образует единый изобретательский замысел, причем, один из заявленных объектов группы - воздушный винт изменяемого шага позволяет осуществить другой рассматриваемый объект группы способ измерения углового положения лопастей воздушного винта, при этом, оба объекта направлены на решение одной и той же задачи с получением единого технического результата.
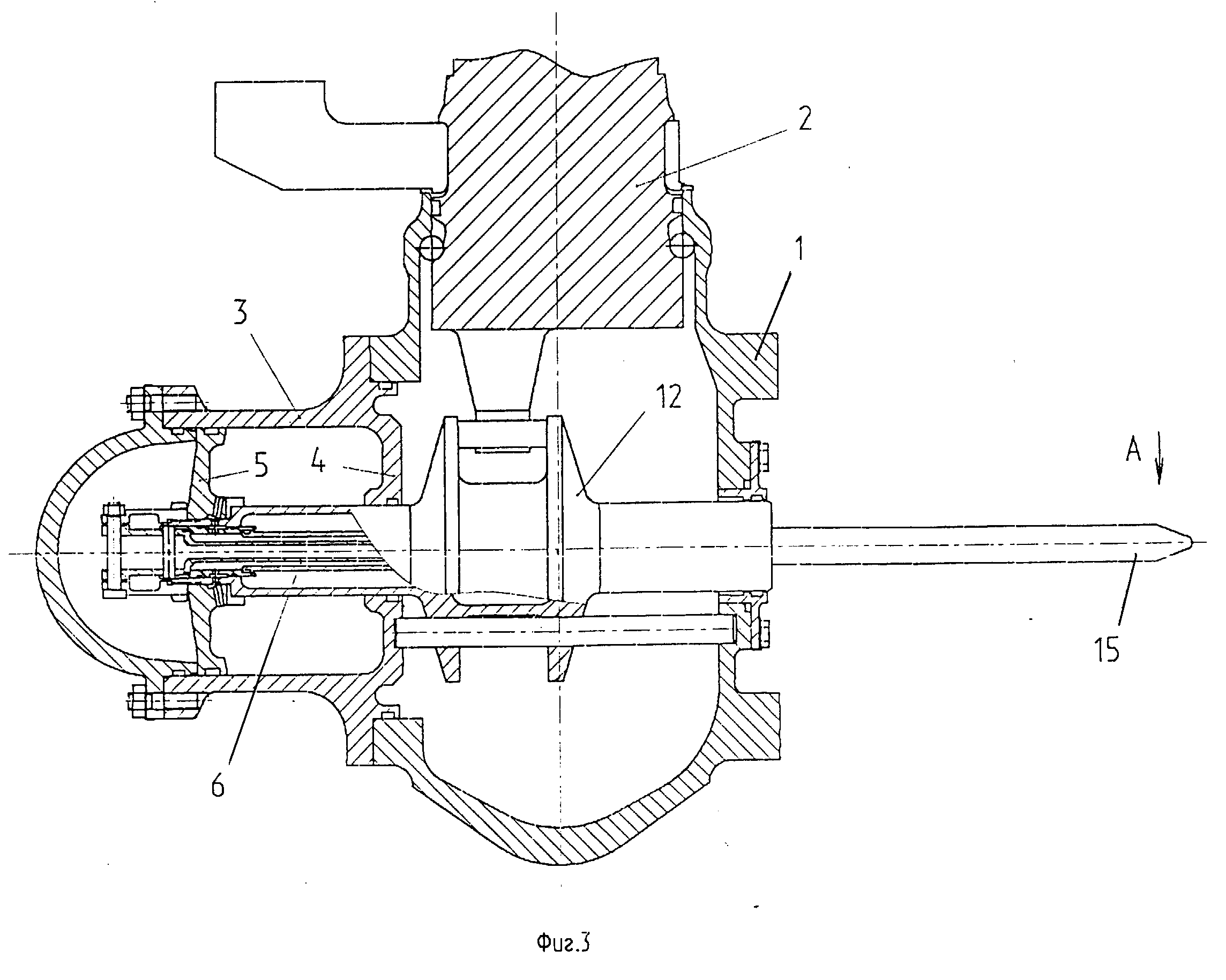
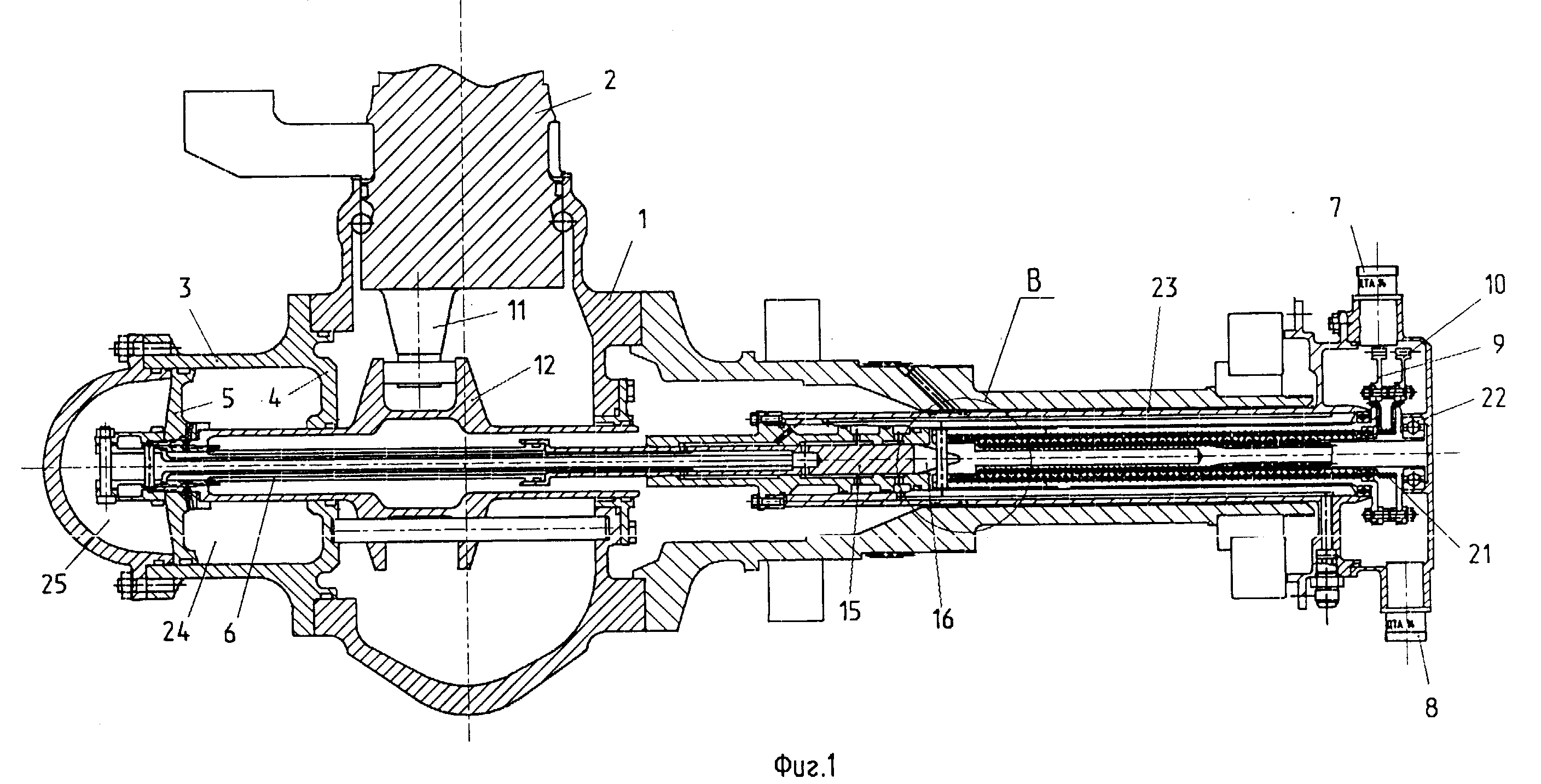
Вышеуказанный технический результат, а также пути его достижения, сущность и преимущества изобретения подробно поясняются нижеследующим описанием и фигурами, на которых: фиг. 1 воздушный винт (продольный разрез); фиг. 2 узел рессор (в увеличенном масштабе); фиг3 воздушный винт (частичная сборка); фиг. 4 вид А фиг. 3; фиг. 5 фрагмент В фиг.1 (в увеличенном масштабе).
Настоящая группа изобретений ставит целью создать воздушный винт изменяемого шага с обратной связью, предназначенный для применения на самолете с возможностью реализации способа измерения текущих углов установки лопастей винта в полете и при работе на земле. Воздушный винт содержит корпус 1, в рукавах которого посредством подшипников закреплены лопасти 2, из которых показана только одна, детали цилиндрово-поршневой группы, образующие гидромеханизм изменения шага и включающие цилиндр 3 с перегородкой 4, поршень 5, скрепленный с механизмом обратной связи от винта к регулятору, включающим маслоподающую бета-трубку 6 и датчик углового положения лопастей, в качестве которого используют частотные датчики 7 и 8, взаимодействующие, соответственно, с индукторами 9 и 10. На комлевом конце лопасти расположен эксцентричный палец 11 со сферическим подшипником, вставленным в паз траверсы 12, скрепленной с поршнем 5 механизма изменения шага винта.
Особенностью заявляемой конструкции винта является то, что в него введены рессоры передачи крутящего момента 13 и 14, концентрично размещенные одна относительно другой и взаимодействующие с маслоподающей бета-трубкой 6 со стороны, противоположной поршню 5. Указанное взаимодействие осуществлено посредством наконечника 15, скрепленного с маслоподающей бета-трубкой и имеющего паз 16 (фиг. 4), в который входит штифт 17, неподвижно прикрепленный к подвижной части внутренней рессоры 14 (фиг. 2). В свою очередь штифт 17 установлен в двух винтовых пазах 18 внешней рессоры 13. Длину винтового паза 18 выбирают такой, чтобы обеспечить поворот внешней рессоры относительно внутренней при се осевом перемещении, равном ходу поршню 5 и маслоподающей бета-трубки 6 в выбранном интервале рабочих углов установки лопастей. Внутренняя рессора 14 выполнена составной из двух частей: левой подвижной и правой неподвижной, в осевом направлении. Части внутренней рессоры сопряжены друг с другом посредством радиальных шлиц, по которым происходит осевое перемещение подвижной левой части относительно неподвижной в осевом направлении правой части. Постоянное взаимодействие штифта 17 с торцевой поверхностью 16' паза 16 при требуемой плотности стыка в выбранном интервале рабочих углов от (Φрев) до (Φmax = Φкрейс+ (5 - 10 град)) обеспечивают посредством пружины 19 и 20. В диапазоне углов от Φmax до Φфлюг штифт 17 и торцевая поверхность 16 паза 16 и наконечника 15 расстыкованы. Штифт 17, входящий в винтовые пазы 18 внешней рессоры, образует совместно с пазами винтовую пару, обеспечивающую возможность углового смещения в окружном направлении внешней рессоры 13 относительно внутренней 14. Рессоры 13 и 14 связаны между собой в окружном направлении посредством спиральной пружины 21, осуществляющей выборку люфтов в окружном направлении в шлицевом соединении внутренней рессоры. На правом конце рессор закреплены вышеупомянутые индукторы: у внешней рессоры 13 индуктор 9 у внутренней рессоры 14 индуктор 10. Узел рессор расположен на подшипнике 22 в неподвижном маслопроводе 23 вала привода винта. Вышеуказанная винтовая пара может быть образована и иными средствами, например, обеспечением взаимодействия рессор 13 и 14 через винтовые шлицы.
Работа воздушного винта, раскрывающая при этом также существо и исполнение заявляемого способа, происходит следующим образом.
Изменение шага винта для поддержания установленного значения частоты вращения осуществляют посредством направления рабочей жидкости переменного давления от регулятора на одну или другую стороны поршня 5 в полости большого шага 24 или в полости малого шага 25. В результате происходит линейное перемещение поршня и поворот связанных с траверсой 12 лопастей 2 пока двигатель не будет вращаться с установленной частотой вращения.
Совместно с поршнем 5 при изменении шага винта перемещается скрепленная с ним маслоподающая бета-трубка 6 с наконечником 15. Поскольку в пазу 16 наконечника размещен штифт 17, запрессованный в отверстие внутренней рессоры 14 и поджатый пружинами 19 и 20 к торцевой поверхности 16 паза 16, то при перемещениях бета-трубки 6 и наконечника 15 происходит также перемещение по шлицам 26 в осевом направлении левой подвижной части внутренней рессоры 14. При этом внешняя рессора 13, зафиксированная от перемещений в осевом направлении подшипниками 27 и 28 получает угловое смещение в окружном направлении относительно внутренней рессоры 14, т.к. штифт 17, перемещается в винтовых пазах 18, вызывает разворот внешней рессоры 13. Рессоры 13 и 14 получают также вращение от наконечника 15, поскольку в его пазу 16 расположен штифт 17, при этом левая подвижная часть внутренней рессоры 14 передает вращение правой части, зафиксированной от перемещении в осевом направлении, через радиальные шлицы 26. В дальнейшем вращение от рессор 13 и 14 передается индукторам, соответственно, 9 и 10, скрепленным с рессорами.
Таким образом, каждому положению поршня 5 и наконечника 15 маслоподающей бета-трубки соответствует определенный разворот в окружном направлении вращающегося индуктора 9, скрепленного с внешней рессорой 13, относительно вращающегося индуктора 10, скрепленного с неподвижной в осевом направлении частью внутренней рессоры 14. Вращающиеся индукторы 9 и 10 наводят импульсные сигналы в индуктивных датчиках, соответственно, 7 и 8. Импульсные сигналы от датчиков 7 и 8, имеющие временное смещение друг относительно друга, поступают в устройство обсчета, например, электронный микропроцессор для обработки, по результатам которой определяют текущее положение поршня 5 в винте и, соответственно, угловое положение лопастей 2. Приемы определения фазового смещения двух вращающихся объектов известны в технике, например, в системах синхрофазирования лопастей воздушных винтов.
Для повышения точности измерения ограничивают диапазон измерений перемещении маслоподающей бета-трубки, как уже было выше упомянуто, выбранным интервалом рабочих углов установки лопастей от (Φрев) до (Φmax = Φкрейс+ (5 - 10 град)). Повышенная точность измерения объясняется уменьшением замеряемой длины хода маслоподающей бета-трубки 6 и наконечника. 15. Выше было подробно разобрано кинематическое обеспечение этого приема посредством паза 16, штифта 17 и пружин 19, 20.
Описанный способ измерения текущих углов установки лопастей фазовым методом с использованием датчиков, взаимодействующих с вращающимися индукторами, имеют более высокую точность и помехозащищенность по сравнению со способом измерения при помощи линейных индуктивных датчиков, так как в нем используют цифровой, а не аналоговый метод обработки информации.
Промышленная применимость описанных объектов в заявляемой группе изобретений доказывается необходимостью их использования в авиации, вызываемой нормативными требованиями к современным воздушным винтам в части надежности их работы, безопасности полета и наличия информации о текущих углах установки лопастей. Возможность осуществления описанных объектов в заявляемой группе изобретений подтверждается тем, что известно практическое применение по прямому назначению частотных датчиков и фазового метода обработки информации в системах синхрофазирования винтов многодвигательной силовой установки самолета.
Источники информации:
1. Патент Германии N 3
406 634 А1, В 64 С 11/44, опубл. 29.08.86.
2. Патент Великобритании N 2 260 821A, B 64 C 11/40, опубл. 28.04. 93. (прототип для устройства).
3. Патент США N 5 211 539, кл. 416/61; 416/147, опубл. 13.05.91. (прототип для способа)у
Реферат
Использование: в авиационной технике, в частности в системах управления воздушными винтами изменяемого шага. Техническая сущность изобретения заключается в том, что устройство для управления винтом содержит гидромеханизм изменения углов установки лопастей с поршнем 5, скрепленным с механизмом обратной связью, включающим маслоподающую бета-трубку 6 и датчик углового положения лопастей, в качестве которого используют частотные датчики 7 и 8 с индукторами 9 и 10. При этом устройство содержит концентрично размещенные рессоры для передачи крутящего момента, взаимодействующие с маслоподающей трубкой 6 со стороны, противоположной поршню, в интервале рабочих углов лопастей от Φрев до Φмакс = Φкрейс плюс 5-10o. Внутренняя рессора кинематически связана с маслоподающей трубкой 6 в осевом направлении, а внешняя - с возможностью углового смещения в окружном направлении относительно внутренней рессоры, обеспечиваемого винтовой парой, включающей штифт и винтовой паз. Рессоры связаны между собой в окружном направлении через спиральную пружину 21. На рессорах размещены индукторы 9 и 10, взаимодействующие с датчиками для определения углового положения лопастей. Техническая сущность способа измерения углового положения лопастей воздушного винта заключается в том, что посредством датчиков 7 и 8 получают импульсные сигналы от взаимодействия с индукторами 9 и 10, один из которых 10 кинематически связан с валом винта, а другой 9 кинематически связан с лопастями. Импульсные сигналы направляют в устройство обсчета для определения углового положения лопастей по фазовому смещению индукторов. При этом вращение обоих индукторов 9 и 10 осуществляют от маслоподающей бета-трубки 6, осевое поступательное движение которой используют для получения фазового смещения одного из индукторов 9 относительно другого 10, а вблизи углов флюгирования прерывают осевую связь индуктора 9 с лопастями. 2 с. и 7 з. п. ф-лы, 5 ил.
Комментарии