Устройство перехода винта в реверс, содержащее приводной механизм, действующий на кривошип - RU2569074C2
Код документа: RU2569074C2
Чертежи







Описание
Настоящее изобретение относится к области авиационных турбомашин и, в частности, к турбовинтовентиляторным двигателям с открытыми винтами, так называемыми “open rotor” или быстрыми винтами, и устройств управления ориентацией лопастей этих винтов.
Технология авиационных двигателей быстро развивается, и одним из путей, используемых для улучшения удельного расхода гражданских авиационных двигателей, является в настоящее время внедрение двигателей с открытыми винтами. Такие двигатели, как описано в заявке на патент FR2941493 Заявителя, содержат газогенератор классического турбодвигателя, одна или несколько ступеней турбины которого приводят во вращение открытый вентилятор, расположенный снаружи двигателя. По причинам достигаемого уровня тяги и уменьшения шума, производимого лопастями, двигатель содержит обычно два открытых винта противовращения, то есть вращающихся в противоположных направлениях, которые расположены на выходе двигателя для наибольшего удаления от пассажирского салона. Общая конфигурация двигателя с открытыми винтами представлена на фиг.1.
Как в случае классических турбовинтовых двигателей, лопасти винтов открытого типа выполнены с изменяемым углом установки, то есть шаг этих винтов может меняться в процессе полета для изменения тяги двигателя и оптимизации КПД винта в зависимости от скорости летательного аппарата. Известны многочисленные устройства для изменения угла установки лопастей, которые включают в себя обычно приведение во вращение лопасти вокруг ее основной оси с помощью конических шестерней, расположенных под ножкой лопасти, которые взаимодействуют с коническими шестернями системы управления. Пример такого устройства представлен в британском документе GB 2218747.
Одним из ограничительных условий систем управления углом установки лопастей винтов является необходимость установки последних в положение, называемое флюгированием, в случае неисправности этой системы. Положение флюгирования заключается в обеспечении поворота винта, пока его хорда не выровняется, по существу, для совмещения с направлением ветра, максимально уменьшая, таким образом, вызываемое им лобовое сопротивление и, следовательно, дисбаланс по рысканию на самолете. Положение флюгирования должно соответствовать положению равновесия, автоматически занимаемому винтом, когда система управления углом установки больше не передает момент. Для этого грузики, образующие противовесы, как правило, крепятся к коническим шестерням системы управления и размещаются навесными относительно их. При нормальной работе они удерживаются в своем положении системой управления. В случае неисправности этой системы действие центробежной силы, вызванное поворотом винта, приводит их в положение покоя, которое соответствует положению флюгирования лопасти.
При нормальной работе в процессе фаз полета угол установки воздушного винта изменяется между двумя крайними положениями, соответствующими положению малого шага с малой скоростью движения вперед порядка 30° относительно плоскости вращения винтов, и положению большого шага с большой скоростью, который составляет порядка 65° относительно той же плоскости вращения винтов. Положение флюгирования соответствует углу установки, превышающему угол установки большого шага, и равно примерно 90°. Углы установки в этих нормальных условиях использования являются, условно, так называемыми положительными.
После посадки летательный аппарат следует замедлить для уменьшения его расстояния пробега и, таким образом, позволить ему использовать полосы уменьшенной длины. Для этого двигатели переводятся в так называемое положение реверса, которое направляет тягу в сторону передней части двигателя. На двигателе с открытыми винтами, как в случае турбовинтовых двигателей, реверс достигается путем обеспечения отрицательного угла установки, то есть размещением передней кромки их лопастей в заднем секторе относительно плоскости вращения винта. Это положение достигается продолжением вращения винта вокруг его продольной оси за пределами малого шага до перехода через положение нулевого шага, то есть положения, в котором лопасти находятся в плоскости вращения винта, и увеличения шага до заданного отрицательного угла установки.
Обычно коническая шестерня ножки лопасти дает 2-кратное понижающее передаточное отношение между углом установки противовесов и углом установки лопастей. Следовательно, поворот винта на 90° между положением флюгирования и положением нулевого шага соответствует повороту грузиков на 180°, что заставляет их перейти из верхнего вертикального и, таким образом, стабильного положения флюгирования в нижнее нестабильное вертикальное положение, находящееся напротив вышеупомянутого.
Одной из проблем, необходимых для решения на этих двигателях, когда речь идет об открытых винтах или турбовинтовых двигателях, является необходимость сделать так, чтобы грузики не оставались в этом нестабильном положении, когда пилот дает команду на переход к реверсу, чтобы была уверенность в том, что лопасти винтов находятся в положении отрицательных углов установки, когда пилот повышает мощность после посадки. В отсутствие этого, подача газа приведет к разносу двигателя, если винты остаются при нулевом угле установки с рисками повышения скорости выше допустимой и, таким образом, к разрушению лопаток, либо также к тяге, осуществляемой винтами, если угол установки остается в зоне положительных углов установки, хотя пилот ожидает осуществления торможения винтами.
Таким образом, важно быть уверенным, что винты переходят нулевое положение угла установки при маневре перехода в реверс, то есть грузики не остаются в нестабильном положении, расположенном между положительными углами установки и отрицательными углами установки.
Целью настоящего изобретения является устранение упомянутых недостатков путем предложения устройства управления шагом винта, которое гарантирует переход грузиками через положение нулевого угла установки в случае команды перехода на реверс.
Для достижения этой цели в качестве объекта изобретения предлагается устройство перехода в положение реверса винтовентиляторной турбомашины путем воздействия на ось управления углом установки упомянутых винтов, при этом упомянутое устройство содержит, по меньшей мере, один грузик, установленный навесным на упомянутой оси управления и выполненный с возможностью привода упомянутых винтов в положение флюгирования под действием центробежной силы, создаваемой вращением турбомашины, при этом устройство содержит также исполнительный механизм, выполненный с возможностью поворота упомянутой оси управления для перевода угла установки винтов из режима тяги в режим реверса, проходя через положение угла установки с нулевым шагом, отличающееся тем, что грузик находится в положении нестабильного равновесия относительно действия центробежной силы, когда упомянутая ось управления переводит угол установки винтов через положение нулевого шага.
Связь нестабильного равновесия грузика с положением нулевого положения угла установки винтов позволяет гарантировать, что винты не останутся в положении нулевого угла установки, что могло бы привести к разрушению двигателя, если бы пилот осуществил дачу газа в этом положении.
Предпочтительно, устройство содержит приводное средство, воздействующее моментом на упомянутую ось управления, когда грузик находится в упомянутом положении нестабильного равновесия так, чтобы помешать ему оставаться в этом положении. Таким образом, винты не перейдут в режим тяги, так как такая конфигурация представляет опасность в случае дачи пилотом газа, когда он считает, что его двигатель находится в режиме реверса.
Предпочтительно, упомянутое приводное средство воздействует моментом на упомянутую ось как при переходе из режима тяги в режим реверса, так и при возврате из режима реверса в режим тяги. Таким образом, гарантируется эффективный переход винтов в желаемую конфигурацию, будь то реверс или тяга.
Предпочтительно, исполнительный механизм не воздействует моментом на ось управления, когда грузики находятся в положении нестабильного равновесия. Такая конфигурация уменьшает возможности взаимодействий между моментами, прикладываемыми к оси управления устройством перехода в реверс и исполнительным механизмом. Оно упрощает доводку устройства перехода в реверс.
В предпочтительном варианте воплощения упомянутое приводное средство воздействует моментом на упомянутую ось управления посредством кривошипа, установленного с возможностью свободного поворота одним из своих концов на упомянутом грузике.
Предпочтительно, упомянутое приводное средство удерживается на одном из своих концов осью поворота, смещенной параллельно оси управления, и возвращается в поворот вокруг этой оси, в направлении кривошипа, с помощью средства, создающего восстанавливающий момент.
Предпочтительно, кривошип несет на своем свободном конце передающее средство, выполненное с возможностью взаимодействия с упомянутым приводным средством так, чтобы передавать момент, обеспечиваемый упомянутым приводным средством, валу управления.
В особом варианте воплощения упомянутым приводным средством является шпонка, а передающим средством является стержень, выполненный с возможностью скольжения на упомянутой шпонке во время перехода в реверс.
Предпочтительным образом, упомянутая шпонка содержит на своем свободном конце удерживающее средство, выполненное с возможностью ограничения скольжения упомянутого стержня на шпонке во время перехода в реверс так, чтобы обеспечить опору для упомянутого кривошипа.
В предпочтительном варианте воплощения упомянутый стержень упирается в упомянутое удерживающее средство удержания перед достижением своего положения нестабильного равновесия посредством упомянутого грузика.
Преимущественно, во время перехода упомянутого грузика в положение нестабильного равновесия стержень упирается в упомянутое удерживающее средство, а кривошип ориентирован таким образом, чтобы вытолкнуть грузик за пределы упомянутого нестабильного положения.
В частном варианте воплощения устройство управления содержит два приводных средства, таких, как описано выше, при этом первое средство воздействует моментом на кривошип для перехода из положения использования в положение реверса, а второе средство воздействует моментом на кривошип для его возврата в положение использования.
Изобретение касается также винта для турбомашины, содержащего ножку лопасти, снабженную устройством управления переходом в положение реверса, описанным выше, а также турбомашины, содержащей, по меньшей мере, один такой винт.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылками на сопровождающие чертежи, на которых:
- Фиг.1 схематично изображает вид в разрезе турбовинтовентиляторного двигателя с быстрым винтом;
- Фиг.2 изображает вид в перспективе устройства управления углом установки лопастей турбодвигателя по Фиг.1 в соответствии с вариантом осуществления изобретения;
- Фиг.3 изображает детальный вид, иллюстрирующий исполнительный механизм устройства управления по Фиг.2;
- Фиг.4 изображает вид спереди устройства по Фиг.2, при этом угол установки винта соответствует положению крейсерского полета;
- Фиг.5 изображает вид спереди устройства по Фиг.2, при этом угол установки винта соответствует положению малого шага, при этом двигатель работает в режиме земного малого газа;
- Фиг.6-8 изображает последовательные виды спереди устройства по Фиг.2, в которых угол установки винта постепенно переходит от положения малого шага при земном малом газе к положению малого шага при реверсе, и
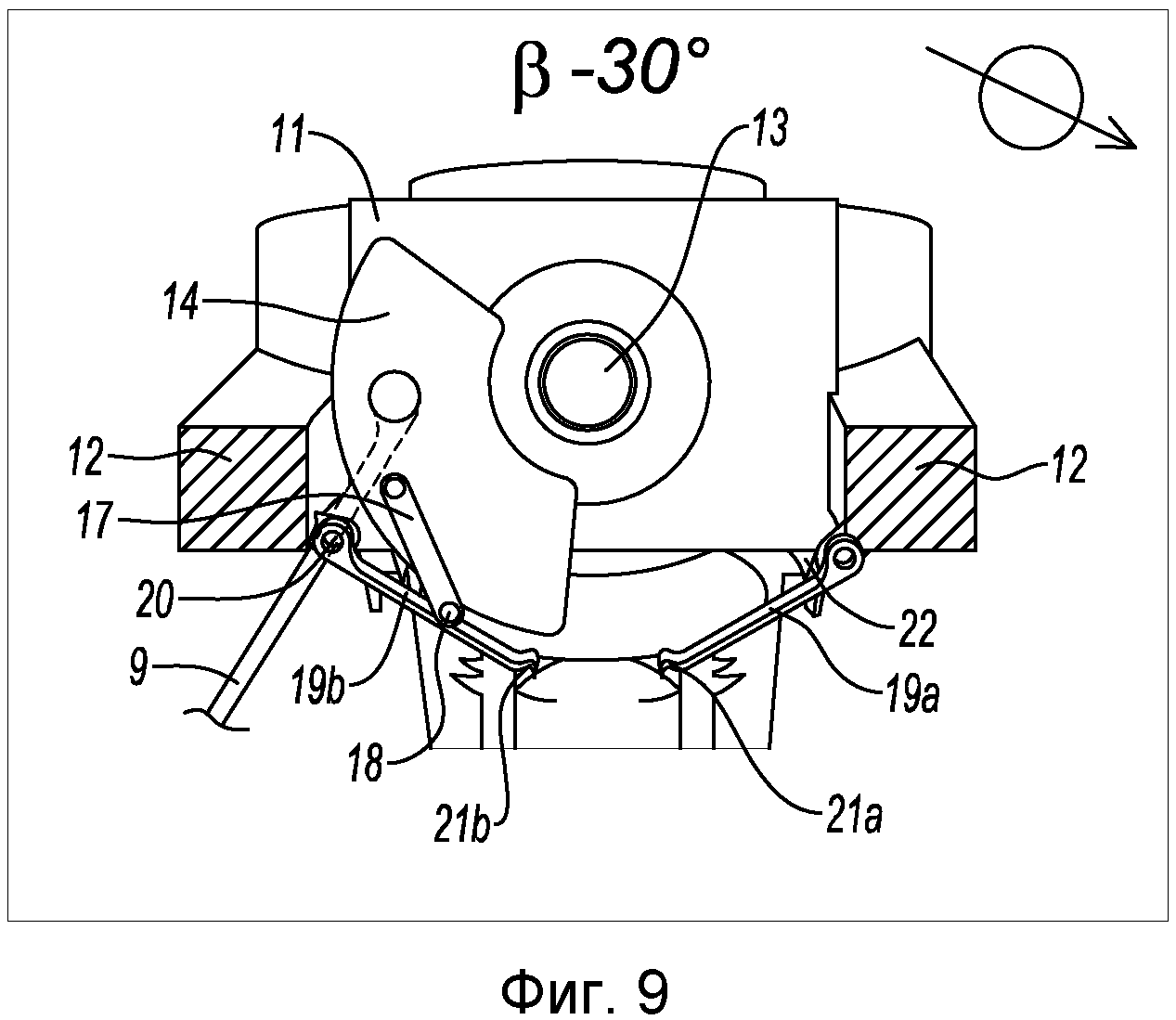
- Фиг.9 изображает вид спереди устройства по Фиг.2, в котором угол установки винта находится в своем конечном положении, соответствующем малому шагу при реверсе.
На Фиг.1 изображен турбовинтовентиляторный двигатель с быстрыми винтами 1, содержащий, с одной стороны, классический газогенератор, включающий, кроме того, компрессор 2, камеру сгорания 3 и турбину 4, которая приводит компрессор 2, и, с другой стороны, свободную турбину 5, расположенную на выходе связанной турбины 5, которая приводит во вращение две последовательности лопастей винтов 6 противоположного вращения. Винты расположены снаружи корпуса 7 газогенератора и их лопатки удерживаются ножками 8 лопаток, поворачивающихся вокруг радиальной относительно турбомашины 1 оси, которая проходит через центр ножки лопатки и которая образует основную ось лопасти. Поворот лопасти обеспечивается исполнительным механизмом, имеющим форму тяги 9, которая воздействует на пару конических шестерен, одна из которых закреплена на лопатке, окружая ножку лопатки 8. Как ранее указывалось, размер этих конических шестерен имеет 2-кратное понижающее передаточное соотношение, чтобы винт совершал поворот между положением флюгирования и положением нулевого угла установки, когда соответствующие грузики осуществили поворот на 180°. Система регулирования 10 с помощью тяг 9 управляет угловым положением лопастей каждого из винтов 6 и обеспечивает их синхронный поворот.
Фиг.2 изображает защитную оболочку 11 устройства управления углом установки лопаток по изобретению, которая окружает ножку лопатки 8 и которая закреплена на удерживающем кольце 12 лопаток. Это поворотное кольцо обеспечивает соединение лопаток с валом двигателя и приводит их во вращение для создания тяги. Оболочка 11 имеет, в основном, форму цилиндра, который окружает ножку 8 лопатки и который содержит боковое окно, откуда выходит ось 13 управления, несущая конические шестерни, которые входят в зацепление с шестернями ножки лопасти для обеспечения управления углом установки лопатки. На этой оси закреплены навесные грузики 14, имеющие форму двух угловых секторов с центром на оси, которые размещены бок в бок и закреплены на диске 15, насаженном на опорную ось 13. Эти два сектора расположены по углу таким образом, чтобы под действием центробежной силы воздействовать моментом, стремящимся осуществить поворот оси 13 и, следовательно, поворот лопастей винта 6 в их положение флюгирования.
На Фиг.3 изображено устройство управления углом установки лопатками 6. Тяга 9 закреплена своим наружным концом на грузиках 14 посредством пальца 16, который проходит через два грузика, проходя параллельно оси 13, и смещен вбок относительно последней. Связь между наружным концом тяги 9 и пальцем 16 является связью, свободной при повороте вокруг пальца так, чтобы тяга 9 могла заставить повернуться грузики 14 при ее продольном перемещении, как это сделал бы рычаг.
Каждый из грузиков 14 несет также ось, на которой установлен кривошип 17, имеющий форму металлического язычка, способного поворачиваться в плоскости, перпендикулярной оси 13 управления. Ось поворота кривошипов расположена на биссектрисе угловых секторов, образующих грузики 14, с наружной стороны грузиков, чтобы придать кривошипам 17 возможно большее плечо рычага. Два кривошипа 17 перемещаются вокруг их общей оси, оставаясь параллельными один другому, при этом их свободные концы остаются связанными соединительным стержнем 18, проходящим в направлении оси 13 управления.
Параллельно удерживающее кольцо 12 с каждой стороны ножки лопасти винта 6 несет две шпонки 19, то есть две детали в форме язычков, закрепленных на кольце 12 одним из своих концов с помощью оси 20, вокруг которой они могут поворачиваться. Различают первую шпонку 19а, которая действует при переходе в реверс, и вторую шпонку 19b, которая действует при возврате в нормальное функционирование. Торсионные пружины (не изображенные на чертеже), размещенные на этих осях 20 шпонок, обеспечивают возврат шпонок в направлении грузиков 14 и медианной плоскости удерживающего кольца 12. Оси 20 шпонок расположены на удерживающем кольце 12 с обеих сторон ножки лопасти в точках, смещенных в сторону относительно оси 13 управления так, чтобы шпонки находились напротив и своим свободным концом упирались в грузики 14, когда отсутствует взаимодействие между ними и кривошипами 17. Каждая из шпонок 19 имеет плоскую форму в виде язычка, проходящего в плоскости, параллельной оси 13 управления, от осей 20 до свободного конца 21, который имеет форму крючка. Функцией последнего является обеспечение упора для соединительного стержня 18, когда он скользит по упомянутой шпонке. Крючок имеет форму двойного крючка, который вначале выпрямляется в направлении грузиков 14 для того, чтобы служить упором, как указано выше, затем далее складывается в противоположном направлении для того, чтобы служить входной площадкой упомянутому соединительному стержню 18. Последний, таким образом, может вновь поступить на шпонку 19 после выхода для того, чтобы скользить по ней для продолжения своего движения, как будет объяснено ниже.
Хотя тяга 9 служит исполнительным механизмом для управления поворотом грузиков 14 и, следовательно, зубчатых шестерен, размещенных на оси 13 управления, система, образованная шпонками 19 и кривошипами 17, служит дополнительным исполнительным механизмом для поворота этих грузиков, передавая им, при определенных условиях работы, момент, который обеспечивают возвратные пружины, установленные на осях 20 шпонок.
Хотя Фиг.4 изображает относительное положение всех элементов, участвующих в управлении углом установки винтов 6 при работе в крейсерском режиме, Фиг.5-9 детализирует изменение этого позиционирования в процессе перехода к реверсу, начиная с земного малого газа (Фиг.5) до положения реверса (Фиг.9). На этих чертежах сверху справа показана также ориентация винта относительно нулевого угла установки и величина β угла установки последнего.
На Фиг.4, иллюстрирующей работу в крейсерском режиме, грузики 14 находятся в положении полувысоты, в положении равновесия, вызванного положением тяги 9, при этом равновесие устанавливается между центробежной силой, вызываемой поворотом кольца 12, который стремится привести грузики в верхнее положение, и силой, вызываемой тягой 9, которая противодействует этому повороту. Такое положение грузиков соответствует угловому положению оси 13, придающему винту задаваемый системой 10 регулирования угол установки β, который находится между положением малого шага и положением большого шага. Отмечается, что в этом положении кривошип не контактирует с первой шпонкой 19а, при этом его соединительный стержень 18 может размещаться свободно против двух грузиков 14 и следовать возможным запрашиваемым системой 10 регулирования поворотам этих грузиков и оси 13 управления. Обе шпонки 19 возвращаются к оси 13 управления с помощью их торсионных возвратных пружин и приходят в положение ожидания, в котором каждая из них упирается в выступ 22, несомый удерживающим кольцом 12.
На Фиг.5 винт находится в положении, соответствующем положению земного малого газа, во время посадки, и которое соответствует положению малого шага. Угол установки β уменьшился по отношению к его значению на крейсерском режиме, и грузики 14 переместились в направлении низа фигуры, т.е. в направлении нулевого угла установки. В этом положении кривошип 17 приблизился к шпонке 19а и его соединительный стержень 18 вошел в контакт с ней. Сейчас нет никакого усилия, воздействующего шпонкой на соединительный стержень, последний по-прежнему упирается на выступ 22.
На Фиг.6 винт находится при вращении в промежуточном положении для перехода в реверс в ответ на силу тяги, действующей посредством системы 10 регулирования на тягу 9. Грузики 14 вышли из положения малого шага, при этом угол установки является по-прежнему положительным. По сравнению с Фиг.5 соединительный стержень 18 проскальзывает по шпонке 19а, которая остается в упоре в выступ 22, и приходит в контакт с ребордой, образованной ее крючком 21а.
На Фиг.7 винт находится в положении, еще более сдвинутом к нулевому углу установки, оставаясь еще с положительным углом установки. Кривошип 17, свободный конец которого блокирован крючком 21а, осуществляет теперь поворот, который приводит его, по существу, к перпендикулярной ориентации относительно первой шпонки 19а. Этот поворот может иметь место только вследствие толкающего действия кривошипа на шпонку 19а, которая отдаляется от выступа 22. Возвратная торсионная пружина, расположенная на оси шпонки, таким образом, сжимается, и ее возвратная сила осуществляет, вследствие этого, толкание шпонки на кривошип 17 и, в конечном итоге, на грузики 14.
На Фиг.8 винт находится в положении нулевого угла установки, при этом положение грузиков соответствует их положению, нестабильному при вращении вокруг оси 13 управления под действием центробежной силы. Свободный конец кривошипа 17 и соединительный стержень 18 по-прежнему удерживаются крючком 21а. В этом положении тяга 9 вытянута максимально и ее ориентация такова, что она установлена в направлении оси 13 управления; она больше не осуществляет поворотного воздействия на грузики 14 и не позволяет им пройти через нижнюю точку для перехода к отрицательным углам установки. Напротив, данная геометрическая конфигурация системы кривошип-шпонка такова, что сила, воздействующая шпонкой, не проходит по оси 13 управления и толкает грузики за пределы их существующего положения. Грузики 14 не могут, таким образом, оставаться в этом нестабильном положении, что является искомой целью изобретения.
На Фиг.9 винт находится в положении реверса. Устройства, участвующие в управлении углом его установки, находятся в положении, симметричном положению, в котором они находятся при земном малом газе при нормальном использовании. Грузики 14 находятся на половине высоты, в равновесии между центробежной силой, которая старается их привести в положение флюгирования посредством отрицательных углов установки, и силой тяги 9, которая фиксирует их положение для того, чтобы угол установки при реверсе соответствовал углу установки, который придает двигателю наибольшую тягу назад. Кривошип 17 приводится в действие посредством грузиков 14 и отходит от крючка 21а первой шпонки 19а; он скользит под второй шпонкой 19b, соответствующей отрицательным углам установки, с использованием рампы крючка 21b последней. Как на Фиг.5, соединительный стержень 18 складывается на грузики 14 под действием второй шпонки и ее возвратной пружины, при этом вторая шпонка 19b опирается на соответствующий выступ 22.
Ниже будет описана работа устройства управления по изобретению, детализирующая изменение угла установки винтов винтовентиляторного двигателя с быстрыми винтами при переходе из положения крейсерского полета в положение реверса в конце посадки летательного аппарата.
При нормальной работе при крейсерском полете или при заходе перед посадкой угол установки винтов 6 находится между положением малого шага и положением большого шага в конфигурации, представленной на Фиг.4. Грузики 14 удерживаются тягой 9, которая препятствует их переходу в положение флюгирования под действием центробежной силы, которая воздействует на них. Кривошипы 17 свободно поворачиваются вокруг пальца 16 грузиков, и соединительный стержень 18 не взаимодействует с первой шпонкой 19а. Регулировка угла установки винтов осуществляется, обычно, воздействием тяги 9 на грузики без участия вспомогательного устройства для перехода в реверс.
После посадки летательного аппарата пилот уменьшает подачу газа и переводит двигатель в режим земного малого газа, что осуществляется путем перевода угла установки винтов в положение малого шага, проиллюстрированного Фиг.5. Для этого система 10 регулирования воздействует на тягу 9 и заставляет повернуть грузики 14 в положение, соответствующее углу установки, примерно, в 30°. В этом положении кривошипы 17 приходят в нижнее положение, где соединительный стержень 18 входит, по конструкции, в контакт с первой шпонкой 19а. Этот контакт между соединительным стержнем 18 и первой шпонкой устанавливается, по существу, посредине последней, без установления давления между этими двумя деталями.
Пилот включает далее переход к реверсу, давая команду системе регулирования на воздействие силой тяги на тягу 9 для ее перевода в наиболее убранное положение относительно грузиков 14. Последние, таким образом, поворачиваются в направлении их положения, соответствующего нулевому углу установки, ведя за собой кривошипы 17 и соединительный стержень 18. Последний вначале скользит вдоль первой шпонки 19а до защемления в крючке 21а (позиция проиллюстрирована на Фиг.6). Вне этого положения поворот грузиков 14 продолжается, причем они воздействуют на кривошипы 17, которые постепенно отодвигают шпонку 19а от грузиков, сжимая возвратную торсионную пружину, размещенную на оси вращения 20 (см. фиг. 7).
Вследствие продолжения воздействия тяги 9 грузики приходят в положение симметрии относительно медианной плоскости удерживающего кольца 12, что соответствует их положению нестабильного равновесия (см. Фиг.8). В этом положении тяга 9 максимально вытянута системой 10 регулирования и находится в направлении оси 13 управления; она больше не оказывает влияния на поворот грузиков 14 и не может его продолжить путем дополнительной силы тяги. Напротив, когда грузики находятся в этом положении нестабильного равновесия, кривошипы 17 испытывают толкающее усилие со стороны первой шпонки 19а, которое является следствием реактивного момента ее торсионной пружины. Это толкающее усилие не ориентировано к оси 13 управления, но направлено в сторону отрицательных углов установки. Грузики, таким образом, продолжают совершать свой поворот и избегают этого положения нестабильного равновесия, что отвечает технической задаче, на решение которой направлено данное изобретение.
Начиная с этого, центробежная сила, которая воздействует на грузики 14, увлекает их, естественным образом, в продолжение поворота, который увеличивает угол установки винтов в направлении отрицательных углов установки. Тяга 9 остается свободной так, чтобы позволить осуществить это движение до заранее заданного углового положения. Этот поворот, таким образом, заставляет выйти соединительный стержень 18 из крючка 21а первой шпонки и встретить крючок 21b второй шпонки 19b. Форма рампы конца крючка позволяет этому стержню 18 скользить по нему и встроиться между второй шпонкой 19b и грузиками 14, размещая, таким образом, элементы для обеспечения прохода грузов через их точку нестабильного равновесия при возврате к нормальному регулированию.
Система устанавливается неподвижно в положении, в котором тяга 9 блокирует любое последующее движение и компенсирует действие этой центробежной силы (см. Фиг.9). Положение удержания выбирается конструктором устройства для того, чтобы придать углу установки винтов величину, которая создает наилучшую силу тяги назад с учетом данного режима двигателя в положении реверса. Как изображено на Фиг.9, без того, чтобы эта величина не была обязательной, угол установки реверса соответствует со знаком минус углу установки при земном малом газе (-30°).
Возврат в положение нормального использования осуществляется подобным же образом, при этом переход через точку нестабильного равновесия осуществляется благодаря толкающему усилию, создаваемому второй шпонкой 19b, которая действует таким же образом, как и первая шпонка 19а при переходе к реверсу, и опирается на крючок 21b второй шпонки 19b.
Реферат
Изобретение относится к области авиации, в частности к конструкциям устройств управления шагом лопастей винтов. Устройство управления переходом в режим реверса винтовентиляторной турбомашины содержит грузик (14), выполненный с возможностью перевода упомянутых винтов в положение флюгирования под действием центробежной силы. Устройство содержит также приводное устройство (9) для осуществления поворота упомянутой оси (13) управления для обеспечения перехода угла установки винтов из положения тяги в положение реверса через положение установки угла с нулевым шагом. Грузик (14) находится в положении нестабильного равновесия по отношению к воздействию центробежной силы, когда упомянутая ось управления заставляет пройти угол установки винтов (6) через положение нулевого шага, при этом оно содержит приводное средство (19) для создания момента на упомянутую ось (13) управления, когда груз находится в упомянутом нестабильном положении так, чтобы помешать ему оставаться в этом положении. Обеспечивается переход грузиками через положение нулевого угла установки лопастей. 3 н. и 11 з.п. ф-лы, 9 ил.
Формула
отличающееся тем, что оно содержит приводное средство (19), воздействующее моментом на ось (13) управления, когда упомянутая ось заставляет перейти угол установки винтов (6) через положение нулевого шага так, чтобы помешать ему остаться в этом положении.
Комментарии