Датчик подъемной силы летательного аппарата - RU2666497C2
Код документа: RU2666497C2
Чертежи



Описание
Область техники, к которой относится изобретение
[0001] Это изобретение, в целом, относится к системам и способам полета летательного аппарата. Более конкретно это изобретение относится к системам и способам для определения доступной подъемной силы летательного аппарата.
Уровень техники
[0002] Доступная подъемная сила летательного аппарата определяет близость к сваливанию, наилучшую скорость набора высоты, наилучший угол набора высоты среди прочих параметров полета. Соответственно, точное определение доступной подъемной силы летательного аппарата является критичным для безопасного и высокоэффективного полета.
[0003] Известные решения для определения доступной подъемной силы летательного аппарата страдают от множества недостатков. Например, известные решения могут испытывать недостаток точности, поскольку они не располагаются достаточно близко к передней кромке крыла или испытывают недостаток адекватной чувствительности. Также некоторые известные решения могут деградировать со временем, когда, например, механические компоненты взаимодействуют и изнашиваются или загрязняющие вещества препятствуют взаимодействиям компонентов.
Сущность изобретения
[0004] Это изобретение относится к системам и способам для измерения доступной подъемной силы летательного аппарата. Преимущественно системы и способы предоставляют высокочувствительный и надежный датчик подъемной силы.
[0005] В одном варианте осуществления датчик подъемной силы может включать в себя флюгерный датчик, привод, LC-цепь, также известную как резонансный контур, и процессор. Флюгерный датчик может располагаться на передней кромке крыла летательного аппарата, так что изменение в угле атаки летательного аппарата изменяет угол флюгерного датчика относительно хорды крыла. Привод может быть соединен с флюгерным датчиком, так что изменение в угле флюгерного датчика относительно хорды изменяет положение привода. LC-цепь может включать в себя индукционную катушку, расположенную на расстоянии от привода, и осциллятор, при этом изменение в положении привода изменяет частоту колебаний LC-цепи. Процессор может принимать изменение в частоте колебаний и может определять соответствующее изменение в доступной подъемной силе летательного аппарата.
[0006] В одном варианте осуществления датчик подъемной силы летательного аппарата может включать в себя флюгерный датчик, привод, LC-цепь и процессор. Флюгерный датчик может располагаться на передней кромке крыла летательного аппарата, где угол, определенный хордой крыла и флюгерным датчиком, изменяется, когда угол атаки летательного аппарата изменяется. Привод может быть связан с флюгерным датчиком и изменять положение, когда угол, определенный флюгерным датчиком и хордой, изменяется. LC-цепь может включать в себя индукционную катушку, расположенную на расстоянии от привода, и осциллятор. Частота колебаний LC-цепи может изменяться, когда положение привода изменяется. Процессор может принимать изменение в частоте колебаний и может определять соответствующее изменение в доступной подъемной силе летательного аппарата.
[0007] При расположении флюгерного датчика на передней кромке крыла датчик подъемной силы является высокочувствительным к изменениям в угле атаки летательного аппарата. Кроме того, за счет размещения на расстоянии привода и индукционной катушки присутствует меньший механический износ компонентов и меньшее вмешательство окружающих факторов во взаимодействии между приводом и индукционной катушкой. Таким образом, датчик является надежным.
[0008] В некоторых вариантах осуществления расстояние между приводом и индукционной катушкой может изменяться, когда угол флюгерного датчика относительно хорды изменяется. В некоторых вариантах осуществления расстояние между приводом и индукционной катушкой может оставаться постоянным, когда угол флюгерного датчика относительно хорды изменяется, а положение и форма привода относительно катушки может изменяться. Например, привод может иметь такую форму, что эффективная область привода, подвергаемая действию индукционной катушки, изменяется, когда угол флюгерного датчика относительно хорды изменяется. В некоторых вариантах осуществления датчик может включать в себя конденсатор параллельно с индукционной катушкой.
[0009] В некоторых вариантах осуществления флюгерный датчик может быть расположен поблизости от точки стагнации крыла, и угол, определяемый флюгерным датчиком и хордой крыла, может изменяться, когда местоположение точки стагнации изменяется. В некоторых вариантах осуществления доступная подъемная сила летательного аппарата может быть использована, чтобы определять угол атаки летательного аппарата. В некоторых вариантах осуществления датчик может включать в себя температурный датчик для компенсации измеренной частоты колебаний.
[0010] В одном варианте осуществления способ определения доступной подъемной силы летательного аппарата может включать в себя измерение изменения частоты колебаний LC-цепи и определение изменения в доступной подъемной силе из изменения частоты колебаний. Цепь может включать в себя осциллятор и индукционную катушку, расположенную на расстоянии от привода. Изменение в частоте колебаний может быть вызвано изменением в положении привода. Изменение в положении привода может быть вызвано изменением в угле флюгерного датчика, расположенного на передней кромке крыла летательного аппарата. Изменение в угле флюгерного датчика может получаться в результате изменения в угле атаки летательного аппарата.
[0011] В одном варианте осуществления способ определения доступной подъемной силы летательного аппарата может включать в себя измерение изменения частоты колебаний LC-цепи и определение изменения в доступной подъемной силе из изменения частоты колебаний. LC-цепь может включать в себя осциллятор и индукционную катушку, расположенную на расстоянии от привода, привод имеет положение, и изменение в положении вызывает изменение частоты колебаний. Летательный аппарат может включать в себя флюгерный датчик, расположенный на передней кромке крыла летательного аппарата, хорда крыла и флюгерный датчик определяют угол, и изменение в угле вызывает изменение в положении привода. Изменение в угле атаки вызывает изменение в угле, который определяется флюгерным датчиком и хордой.
[0012] Позиционируя флюгерный датчик на передней кромке крыла, способ является высокочувствительным к изменениям в угле атаки летательного аппарата. Кроме того, размещая раздельно привод и индукционную катушку, способ уменьшает деградацию этих компонентов со временем вследствие износа или загрязнения.
[0013] В некоторых вариантах осуществления расстояние между приводом и индукционной катушкой может изменяться, когда угол флюгерного датчика относительно хорды изменяется. В некоторых вариантах осуществления расстояние между приводом и индукционной катушкой может оставаться постоянным, когда угол флюгерного датчика относительно хорды изменяется, и привод может иметь такую форму, что эффективная область привода, подвергающаяся действию индукционной катушки, изменяется, когда угол флюгерного датчика относительно хорды изменяется. В некоторых вариантах осуществления конденсатор может быть соединен параллельно с индукционной катушкой.
[0014] В некоторых вариантах осуществления флюгерный датчик располагается поблизости от точки стагнации крыла, и угол, определяемый флюгерным датчиком и хордой, может изменяться, когда местоположение точки стагнации изменяется. В некоторых вариантах осуществления способ включает в себя использование доступной подъемной силы летательного аппарата, чтобы определять угол атаки летательного аппарата. В некоторых вариантах осуществления способ может включать в себя измерение окружающей температуры и регулирование измеренной частоты колебаний. Эта регулировка может компенсировать изменения в частоте колебаний, вызванные изменениями в температуре.
[0015] В одном варианте осуществления датчик подъемной силы летательного аппарата включает в себя флюгерный датчик, компрессор, LC-цепь и процессор. Флюгерный датчик может быть расположен на передней кромке крыла летательного аппарата, флюгерный датчик и крыло определяют угол, который может изменяться, когда угол атаки летательного аппарата изменяется. Компрессор может иметь положение, которое изменяется, когда угол, определяемый флюгерным датчиком и крылом, изменяется. LC-цепь может включать в себя индукционную катушку и осциллятор, при этом цепь может иметь частоту колебаний, которая изменяется, когда индукционная катушка сжимается посредством компрессора. Процессор может принимать изменение в частоте колебаний и может определять соответствующее изменение в доступной подъемной силе летательного аппарата.
Краткое описание чертежей
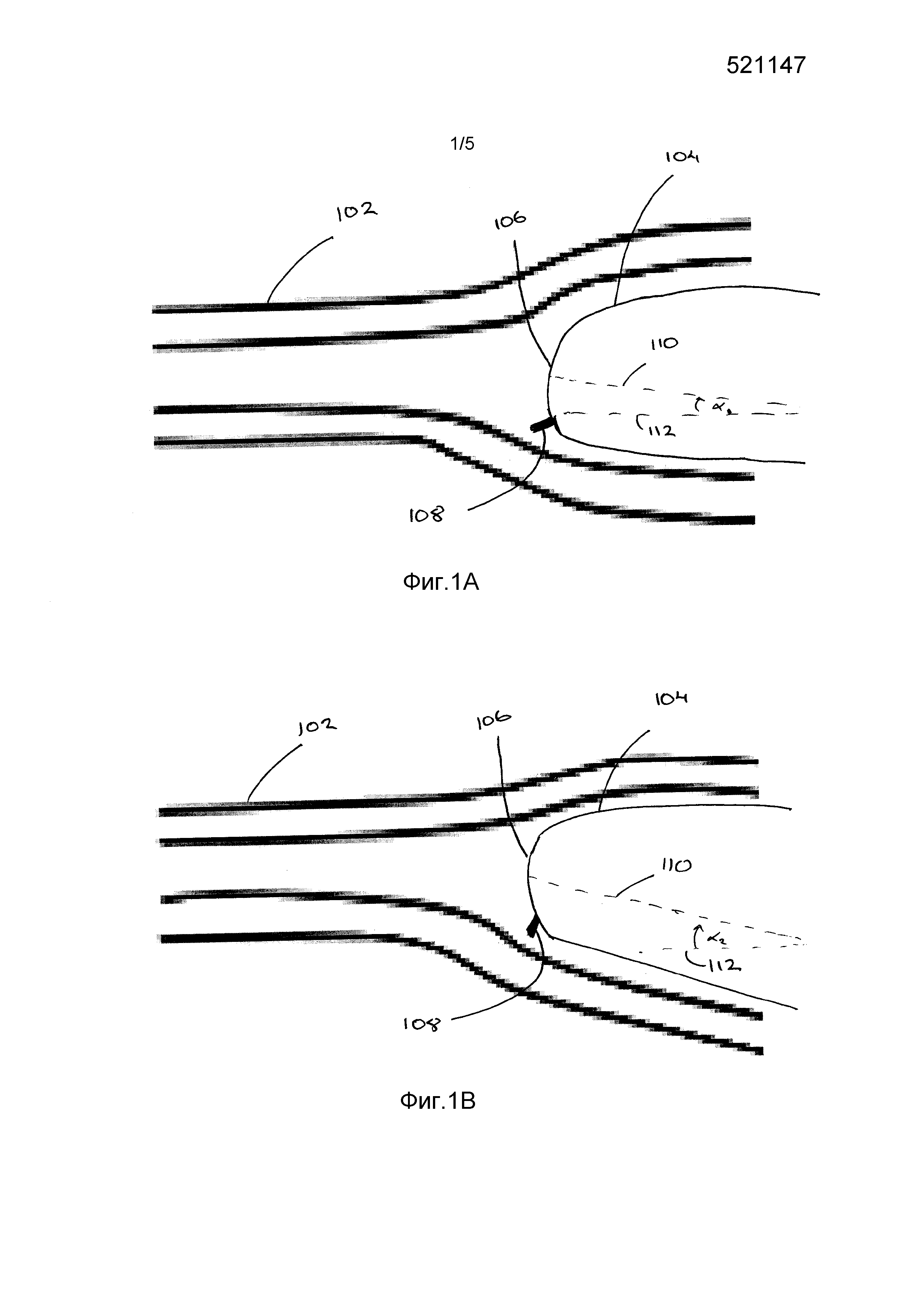
[0016] Фиг. 1A изображает пример поперечного сечения крыла летательного аппарата с углом атаки α1 в соответствии с вариантом осуществления. Фиг. 1B изображает пример поперечного сечения крыла летательного аппарата на фиг. 1A с углом атаки α2.
[0017] Фиг. 2 изображает пример принципиальной схемы для датчика подъемной силы в соответствии с вариантом осуществления.
[0018] Фиг. 3A изображает пример компонентов датчика подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 3B изображает пример компонентов датчика на фиг. 3A, когда летательный аппарат находится под вторым углом атаки.
[0019] Фиг. 4A изображает пример компонентов датчика подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 4B изображает пример компонентов датчика на фиг. 4A, когда летательный аппарат находится под вторым углом атаки.
[0020] Фиг. 5A изображает пример компонентов датчика подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 5B изображает пример компонентов датчика на фиг. 5A, когда летательный аппарат находится под вторым углом атаки.
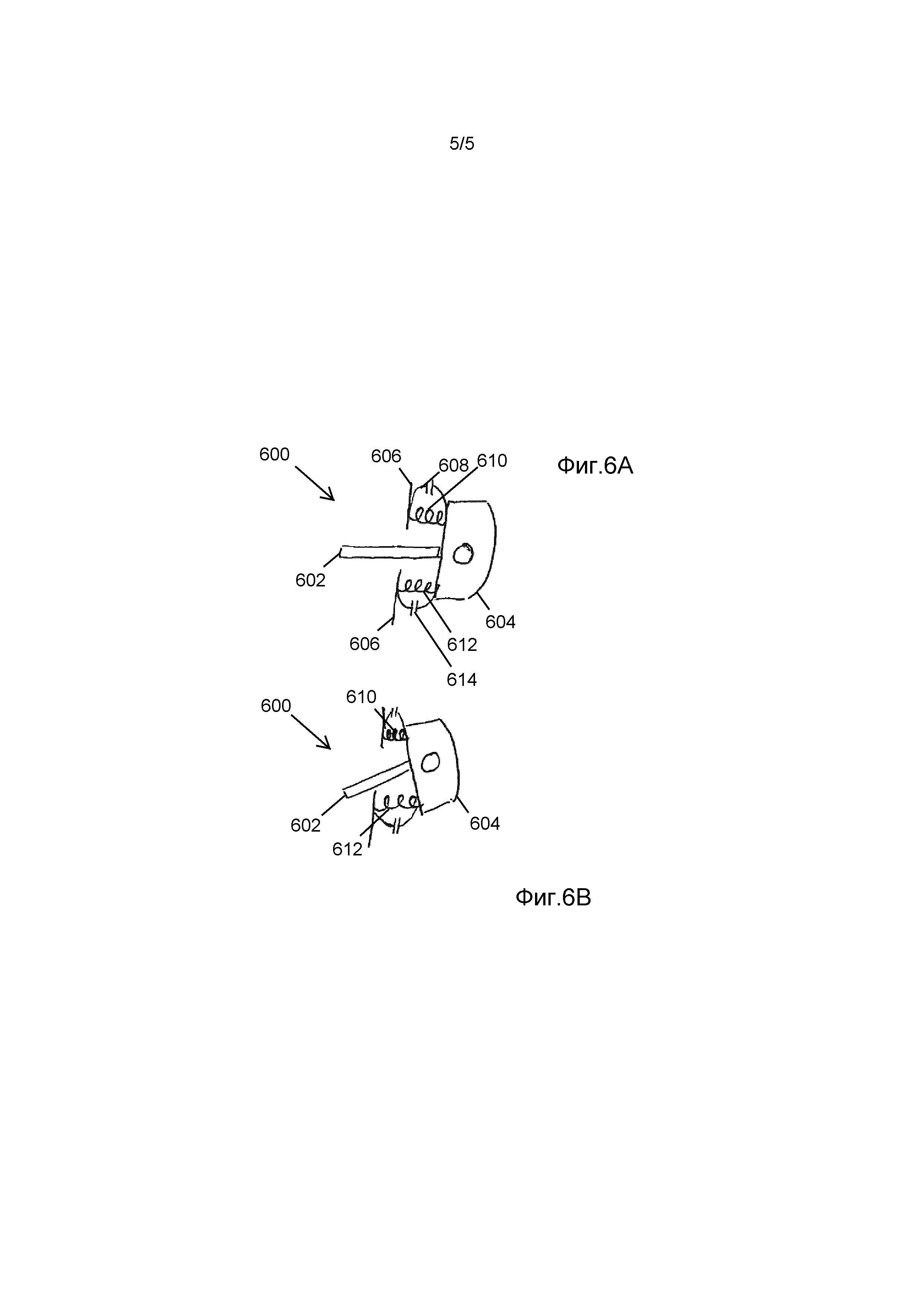
[0021] Фиг. 6A изображает пример компонентов датчика подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 6B изображает пример компонентов датчика на фиг. 6A, когда летательный аппарат находится под вторым углом атаки.
Подробное описание изобретения
[0022] В последующем описании вариантов осуществления ссылка делается на сопровождающие чертежи, которые формируют часть данного документа и на которых показаны в качестве иллюстрации конкретные варианты осуществления, в которых заявленный предмет изучения может быть реализован на практике. Нужно понимать, что могут быть использованы другие варианты осуществления, и структурные изменения могут быть сделаны без отступления от цели заявленного предмета изучения.
[0023] В некоторых вариантах осуществления датчик подъемной силы летательного аппарата может включать в себя флюгерный датчик, привод, LC-цепь и процессор. Флюгерный датчик может располагаться на передней кромке крыла летательного аппарата, где угол, определенный крылом и флюгерным датчиком, изменяется, когда угол атаки летательного аппарата изменяется. Привод может быть связан с флюгерным датчиком и изменять положение, когда угол, определенный флюгерным датчиком и крылом, изменяется. LC-цепь может включать в себя индукционную катушку, расположенную на расстоянии от привода и осциллятора. Частота колебаний LC-цепи может изменяться, когда положение привода изменяется. Процессор может принимать изменение в частоте колебаний и может определять соответствующее изменение в доступной подъемной силе летательного аппарата. Преимущественно системы и способы предоставляют высокочувствительный и надежный датчик подъемной силы.
[0024] Фиг. 1A изображает пример поперечного сечения крыла 102 летательного аппарата с углом атаки α1 в соответствии с вариантом осуществления. Когда используется в данном документе, угол атаки летательного аппарата может пониматься как включающий в себя угол между ориентирной линией летательного аппарата (например, линией хорды, идентифицированной как 110 на фиг. 1A) и траекторией полета (вектор, представляющий относительное перемещение летательного аппарата сквозь окружающий воздух 102, идентифицированный как 112 на фиг. 1A).
[0025] Крыло 104 летательного аппарата включает в себя переднюю кромку 106 с флюгерным датчиком 108, расположенным на передней кромке и на поверхности крыла. Когда крыло находится под углом атаки α1, флюгерный датчик 108 ориентируется под первым углом по отношению к поверхности крыла.
[0026] Фиг. 1B изображает пример поперечного сечения крыла летательного аппарата на фиг. 1A с углом атаки α2. Под этим углом атаки флюгерный датчик 108 ориентируется под вторым углом к поверхности крыла. Изменение в угле флюгерного датчика получается в результате изменений в давлении, окружающем переднюю кромку поверхности крыла. В некоторых вариантах осуществления изменение в угле флюгерного датчика 108 может быть использовано, чтобы определять доступную подъемную силу крыла 104 летательного аппарата.
[0027] Преимущественно размещая флюгерный датчик на передней кромке крыла, датчик подъемной силы может быть высокочувствительным к изменениям в доступной подъемной силе крыла.
[0028] Фиг. 2 изображает пример принципиальной схемы LC-цепи 200, используемой в датчике подъемной силы в соответствии с вариантом осуществления. Цепь 200 включает в себя индукционную катушку 204 и осциллятор 210. Осциллятор 210 создает переменный ток в цепи 200, который включает в себя частоту колебаний. Переменный ток создает колеблющееся магнитное поле вокруг катушки 204.
[0029] Когда используется в данном документе, LC-цепь может пониматься как резонирующий контур, содержащий индуктор. Привод 202 располагается на расстоянии от катушки 204 с тем, чтобы уменьшать вихревые токи на приводе 202, когда ток протекает через цепь 200. Эти вихревые токи влияют на магнитное поле, окружающее катушку, что влияет на частоту колебаний цепи 200.
[0030] Изменение в расстоянии между приводом 202 и катушкой 204 создает соответствующее изменение в частоте колебаний цепи 200 (этот аспект объясняется дополнительно со ссылкой на фиг. 3A и 3B). Аналогично изменение в размере взаимодействия между приводом 202 и катушкой 204 будет также создавать соответствующее изменение в частоте колебаний цепи 200 (этот аспект объясняется дополнительно со ссылкой на фиг. 4A и 4B).
[0031] Цепь 200 также включает в себя конденсатор 206 и резистор 208. Конденсатор 206 может создавать рассеивание энергии системы, тем самым улучшая эффективность. В некоторых вариантах осуществления конденсатор 206 и резистор 208 отсутствуют.
[0032] В некоторых вариантах осуществления привод 202 соединяется с флюгерным датчиком, расположенным на поверхности крыла. Когда угол атаки летательного аппарата изменяется, давление выше и ниже флюгерного датчика изменяется, приводя в результате к изменениям в ориентации флюгерного датчика. Изменения в ориентации флюгерного датчика вызывают изменения в положении привода 202 относительно индукционной катушки 204. Следовательно, изменения в ориентации флюгерного датчика могут косвенно вызывать изменения в частоте колебаний LC-цепи 200. Таким образом, изменения в угле атаки летательного аппарата могут быть измерены посредством изменений в частоте колебаний LC-цепи и использованы для определения доступной подъемной силы.
[0033] Чтобы определять доступную подъемную силу, угол атаки выбирается в качестве контрольного показателя. Как только это условие полета выбрано, отклонения от этого условия полета будут приводить в результате к изменениям в давлении, окружающем флюгерный датчик. Как описано выше, изменения в угле атаки будут приводить в результате к изменениям в давлении, окружающем флюгерный датчик, которые, в конечном счете, могут быть использованы для определения изменения в доступной подъемной силе.
[0034] В некоторых примерах датчик подъемной силы используется, чтобы определять угол атаки летательного аппарата. Из выходного сигнала датчика подъемной силы коэффициент подъемной силы определяется посредством ссылки на изменение в давлении. Кроме того, место точки срыва определяется посредством ссылки на изменение в давлении. Из коэффициента подъемной силы и точки срыва может быть определен угол атаки летательного аппарата.
[0035] Фиг. 3A изображает пример компонентов датчика 300 подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Иллюстрированные компоненты датчика 300 подъемной силы включают в себя флюгерный датчик 302, систему 304 соединений, привод 306 и индукционную катушку 308. Система 304 соединений функционально соединяет флюгерный датчик 302 с приводом 306, так что изменение в ориентации флюгерного датчика 302 перемещает привод 306.
[0036] Фиг. 3B изображает пример компонентов датчика 300, когда летательный аппарат находится под вторым углом атаки, отличным от первого. В результате изменения угла атаки ориентация флюгерного датчика 302 изменилась. Изменение в ориентации привело в результате к перемещению привода 306 от катушки 308. Как объяснено ранее относительно фиг. 2, это изменение в расстоянии между приводом 306 и индукционной катушкой 308 будет приводить в результате к изменениям в частоте колебаний LC-цепи, которая включает в себя индукционную катушку 308. Это изменение в частоте колебаний может затем быть использовано для определения изменения в давлении на флюгерный датчик.
[0037] Соответственно, изменение в доступной подъемной силе соответствующего летательного аппарата может быть измерено косвенно посредством LC-цепи, соединенной с катушкой 308 через привод 306. Преимущественно размещая раздельно привод и индукционную катушку, не существует механического износа компонентов, и окружающие факторы не могут существенно мешать взаимодействиям между приводом и индукционной катушкой.
[0038] Фиг. 4A изображает пример компонентов датчика 400 подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 4B изображает пример компонентов, когда летательный аппарат находится под вторым углом атаки, отличным от первого.
[0039] Передатчик 400 отличается от передатчика 300 тем, что расстояние между приводом 406 и индукционной катушкой 408 остается постоянным, когда флюгерный датчик 402 изменяет свою ориентацию. Чтобы измерять изменение в ориентации, привод 406 не имеет однородной формы, так что различные поперечные сечения привода 406 обеспечивают различные взаимодействия с индукционной катушкой 408.
[0040] Таким образом, изменение в относительном положении привода 406 и индукционной катушки 408 вызывают изменение в частоте колебаний соответствующей LC-цепи. Соответственно, изменение в доступной подъемной силе на крыле может быть измерено косвенно посредством LC-цепи, соединенной с катушкой 408.
[0041] Фиг. 5A изображает пример компонентов датчика 500 подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 5B изображает пример компонентов, когда летательный аппарат находится под вторым углом атаки, отличным от первого.
[0042] Передатчик 500 отличается от передатчика 300 тем, что расстояние между приводом 506 и индукционной катушкой 508 остается постоянным, когда флюгерный датчик 502 изменяет свою ориентацию. Передатчик 500 отличается от передатчика 400 тем, что отклонение флюгерного датчика 502 вынуждает систему 504 соединений поворачиваться и, следовательно, вращать привод 506 вокруг оси поворота. Это вызывает изменение в эффективной области привода 506, который взаимодействует с катушкой 508.
[0043] Таким образом, изменение в относительном положении привода 506 и индукционной катушки 508 вызывает изменение в частоте колебаний соответствующей LC-цепи. Соответственно, изменение в доступной подъемной силе на крыле может быть измерено косвенно посредством LC-цепи, соединенной с катушкой 508.
[0044] Хотя не показано на фиг. 3A, 3B, 4A, 4B, 5A и 5B, датчики 300, 400, 500 могут включать в себя механизм, чтобы препятствовать перемещению флюгерного датчика и привода. Таким образом, относительное перемещение флюгерного датчика и привода будет поворачиваться в противоположном направлении, когда давление на флюгерный датчик снимается. Как будет легко понятно специалисту в области техники, существует множество механизмов, посредством которых можно достигать такого переворачивания перемещения.
[0045] Фиг. 6A изображает пример компонентов датчика 600 подъемной силы, когда летательный аппарат находится под первым углом атаки, в соответствии с вариантом осуществления. Фиг. 6B изображает пример компонентов, когда летательный аппарат находится под вторым углом атаки, отличным от первого.
[0046] Иллюстрированные компоненты датчика 600 подъемной силы включают в себя флюгерный датчик 602, компрессор/расширитель 604, поверхность 606 крыла самолета, первую индукционную катушку 610 и соответствующую цепь 608 и вторую индукционную катушку 612 и соответствующую цепь 612.
[0047] Когда угол флюгерного датчика изменяется, как показано на фиг. 6B, компрессор/расширитель 604 сжимает первую катушку 610 и предоставляет возможность второй катушке 612 растягиваться. Посредством сжатия и растягивания катушек частота колебаний в соответствующих цепях будет изменяться. Это изменение в частоте колебаний может затем быть использовано для определения изменения в давлении на флюгерный датчик. Соответственно, изменение в доступной подъемной силе на крыле может быть измерено косвенно посредством LC-цепи, соединенной либо с катушкой 610, либо с катушкой 612.
[0048] В некоторых вариантах осуществления датчик подъемной силы может включать в себя температурный датчик для измерения окружающей температуры. Этот датчик может быть использован, чтобы смещать измеренную частоту колебаний, чтобы компенсировать чувствительные к температуре аспекты датчика.
[0049] В одном варианте осуществления способ определения доступной подъемной силы летательного аппарата может включать в себя измерение изменения частоты колебаний LC-цепи и определение изменения в доступной подъемной силе из изменения частоты колебаний. Цепь может включать в себя осциллятор и индукционную катушку, расположенную на расстоянии от привода. Изменение в частоте колебаний может быть вызвано изменением в положении привода. Изменение в положении привода может быть вызвано изменением в угле флюгерного датчика, расположенного на передней кромке крыла летательного аппарата. Изменение в угле флюгерного датчика может получаться в результате изменения в угле атаки летательного аппарата.
[0050] В одном варианте осуществления способ определения доступной подъемной силы летательного аппарата может включать в себя измерение изменения частоты колебаний LC-цепи и определение изменения в доступной подъемной силе из изменения частоты колебаний. LC-цепь может включать в себя осциллятор и индукционную катушку, расположенную на расстоянии от привода, привод имеет положение, и изменение в положении вызывает изменение частоты колебаний. Летательный аппарат может включать в себя флюгерный датчик, расположенный на передней кромке крыла летательного аппарата, крыло и флюгерный датчик определяют угол, и изменение в угле вызывает изменение в положении привода. Изменение в угле атаки вызывает изменение в угле, определяемом флюгерным датчиком и крылом.
[0051] При размещении флюгерного датчика на передней кромке крыла способ является высокочувствительным к изменениям в угле атаки летательного аппарата. Кроме того, размещая раздельно привод и индукционную катушку, способ уменьшает деградацию этих компонентов со временем.
[0052] В некоторых вариантах осуществления расстояние между приводом и индукционной катушкой может изменяться, когда угол флюгерного датчика относительно крыла изменяется. В некоторых вариантах осуществления расстояние между приводом и индукционной катушкой может оставаться постоянным, когда угол флюгерного датчика относительно крыла изменяется, и привод является треугольным.
[0053] В некоторых вариантах осуществления флюгерный датчик располагается поблизости от точки стагнации крыла, и угол, определяемый флюгерным датчиком и крылом, может изменяться, когда местоположение точки стагнации изменяется. В некоторых вариантах осуществления способ включает в себя использование доступной подъемной силы летательного аппарата, чтобы определять угол атаки летательного аппарата. В некоторых вариантах осуществления способ включает в себя измерение окружающей температуры и регулирование измеренной частоты колебаний.
[0054] В некоторых вариантах осуществления компьютер может использовать датчик подъемной силы, описанный в данном документе, чтобы обеспечивать дополнительную функциональность для экипажа или других систем летательного аппарата. В дополнительных вариантах осуществления компьютер может предоставлять входные данные для системы автопилота, системы автомата тяги, предоставлять предупреждение о приближении к сваливанию, устанавливать лучшую скорость набора высоты, лучший угол набора высоты и лучший ресурс, например. В некоторых вариантах осуществления компьютер может также принимать входные данные положений закрылков, силы тяги летательного аппарата, скорости полета летательного аппарата, барометрического давления или высоты.
[0055] Специалист в соответствующей области техники признает, что многие возможные модификации и комбинации раскрытых вариантов осуществления могут быть использованы, в то же время все еще применяя те же базовые основные механизмы и методологии. Приведенное выше описание, в целях объяснения, было написано со ссылками на конкретные варианты осуществления. Однако иллюстративные обсуждения выше не предназначены, чтобы быть исчерпывающими или ограничивать изобретение точными раскрытыми формами. Множество модификаций и разновидностей возможно в свете вышеуказанных идей. Варианты осуществления были выбраны и описаны для того, чтобы объяснять принципы изобретения и их практические применения и чтобы предоставлять возможность другим специалистам в области техники лучше использовать изобретение и различные варианты осуществления с различными модификациями, которые подходят для конкретного рассматриваемого использования.
[0056] Дополнительно, в то время как эта спецификация содержит многие особенности, они не должны истолковываться как ограничения рамок того, что заявляется, или того, что может быть заявлено, а скорее представлена как описания признаков, характерных для конкретных вариантов осуществления. Конкретные признаки, которые поясняются в этом подробном описании в контексте отдельных вариантов осуществления, также могут быть реализованы комбинированно в одном варианте осуществления. Наоборот, различные признаки, которые описываются в контексте одного варианта осуществления, могут также быть реализованы во множестве вариантов осуществления отдельно или в любой подходящей субкомбинации. Кроме того, хотя признаки могут описываться выше как работающие в определенных комбинациях и даже первоначально задаваться в формуле изобретения по существу, один или более признаков из заявленной комбинации в некоторых случаях могут быть исключены из комбинации, и заявленная комбинация может быть направлена на субкомбинацию или на изменение субкомбинации.
Реферат
Группа изобретений относится к датчикам подъемной силы летательного аппарата и способу определения доступной подъемной силы. Датчик подъемной силы в одном варианте содержит флюгерный датчик на передней кромке крыла, привод, связанный с флюгерным датчиком, LC-цепь, расположенные определенным образом, процессор. Датчик подъемной силы во втором варианте содержит флюгерный датчик, компрессор, связанный с флюгерным датчиком, LC-цепь, процессор. LC-цепь содержит индукционную катушку и осциллятор. Для определения доступной подъемной силы измеряют изменение частоты колебаний LC-цепи, вызванное изменением положения привода, связанного с флюгерным датчиком. Обеспечивается повышение надежности и чувствительности датчика подъемной силы. 3 н. и 16 з.п. ф-лы, 11 ил.
Комментарии