Гибкая управляющая поверхность для летательного аппарата - RU2408498C2
Код документа: RU2408498C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к гибкой управляющей поверхности для летательного аппарата и к способу регулирования положения такой управляющей поверхности.
Уровень техники
Летательные аппараты имеют управляющие поверхности, обеспечивающие управлением летательным аппаратом в полете путем индивидуального регулирования положения этих управляющих поверхностей. В случае самолета к таким управляющим поверхностям относятся, в частности, закрылки, шарнирно устанавливаемые на задней кромке основной несущей поверхности и используемые для адаптации профиля крыла в соответствии с изменяющимися ограничениями в ходе полета (в особенности на этапах взлета и посадки). Управляющей поверхностью для летательного аппарата также может быть элерон, руль направления или руль высоты. Кроме того, управляющими поверхностями могут быть и предкрылки или отклоняемые щитки. В случае вертолетов в качестве управляющих поверхностей используются, в частности, регулируемые закрылки, навешиваемые на лопасти сзади по направлению обтекающего потока.
При регулировании положения жестких управляющих поверхностей, обычно осуществляемом посредством электрических, гидравлических или электрогидравлических исполнительных механизмов, или приводов, могут возникать некоторые проблемы. К ним относятся, например, заклинивание исполнительных механизмов, не позволяющее регулировать положение управляющих поверхностей. Например, гидравлические исполнительные механизмы могут включаться через перепускные клапаны. Для уменьшения неблагоприятных последствий заклинивания исполнительных механизмов также предлагалось отклонять управляющие поверхности с помощью нескольких исполнительных механизмов, каждый из которых снабжен скользящей муфтой. Это означает, что заклинивший исполнительный механизм уже активно не воздействует на соответствующую управляющую поверхность, а регулирование ее положения осуществляется другими, по-прежнему работоспособными исполнительными механизмами. Подобная схема надежна в эксплуатации, но применение муфт усложняет конструкцию, делает ее сравнительно тяжелой и неэффективной с точки зрения избыточности исполнительных механизмов.
Еще одна проблема при регулировании положения управляющей поверхности вытекает из того обстоятельства, что в направлении набегающего потока возникают нарушения непрерывности, такие как изломы профиля, промежутки или щели, между управляющей поверхностью и близлежащей конструкцией, например основной несущей поверхностью. Аналогичным образом, после задействования управляющих поверхностей, в частности после выпуска закрылков, между смежными управляющими поверхностями возникают зазоры, которые обычно располагаются в ряд по размаху, а также разрывы контура аэродинамического профиля, тянущиеся в направлении размаха. С точки зрения аэродинамики это означает образование вихрей в воздухе и возникновение шума. Эти эффекты усугубляются в полете при взаимных перемещениях элементов и увеличении размеров соответствующих зазоров и щелей между управляющими поверхностями и/или между управляющей поверхностью и близлежащей конструкцией.
Для адаптации кривизны профиля оболочковой конструкции, в частности основной несущей поверхности летательного аппарата, к различным режимам полета в публикации DE 19709917 С1 было предложено решение, согласно которому с помощью исполнительных механизмов противоположные друг другу ребра, расположенные на верхнем и нижнем элементах обшивки, образующих основную несущую поверхность, выпучиваются наружу или притягиваются друг к другу. Таким образом можно растягивать или сферически деформировать эти присоединенные к ребрам элементы обшивки, придавая основной несущей поверхности другой профиль.
В публикации DE 19858872 А1 предложена адаптивная основная несущая поверхность летательного аппарата, в которой сочлененные друг с другом стержни перемещаются с помощью исполнительного механизма таким образом, чтобы выпучивать или растягивать гибкую обшивку основной несущей поверхности.
Однако деформирование основных несущих поверхностей, или крыльев, целиком на практике неосуществимо, поскольку, с одной стороны, необходимо обеспечивать достаточную удельную нагрузку на крыло, а с другой стороны, в такую конструкцию необходимо вписать топливные баки, которые обычно размещаются в основных несущих поверхностях.
Таким образом, в ранее предлагавшихся конструкциях геометрия основной несущей поверхности может в отдельных местах согласовываться с изменившимся положением управляющей поверхности, но зазоры и щели между основной несущей поверхностью и связанной с ней управляющей поверхностью, а также между смежными управляющими поверхностями все же остаются, в результате чего в воздухе образуются крупные вихри.
В публикации DE 19732953 С1 предлагается основная несущая поверхность с закрылком, который в области задней кромки способен упруго изгибаться под действием исполнительного механизма, расположенного снаружи профиля закрылка. С этой целью обшивка закрылка на стороне разрежения и стороне давления выполнена из эластичного материала. Подобная конструкция позволяет упруго деформировать весь закрылок вверх или вниз, обеспечивая таким образом переход к близлежащей конструкции без изломов в направлении набегающего потока. Применение эластичного материала позволяет достичь непрерывности или плавности перехода, что уменьшает вихреобразование. Однако даже в подобных системах возникают значительные спутные вихри.
Раскрытие изобретения
В основу изобретения положена задача создания устройства и способа, которые позволили бы уменьшить обусловленное управляющими поверхностями вихреобразование, уменьшив таким образом шум и спутные вихри, источником которых являются управляющие поверхности.
Эта задача решается с помощью устройства и способа, охарактеризованных в независимых пунктах формулы изобретения. Частные варианты осуществления изобретения охарактеризованы в зависимых пунктах формулы изобретения.
Предлагаемая в изобретении гибкая управляющая поверхность содержит по меньшей мере два исполнительных механизма, которые воздействуют на управляющую поверхность в различных точках, разнесенных друг от друга в стороны относительно направления набегающего потока, т.е. в направлении размаха (эти точки называются точками приложения усилий), и которые рассчитаны на то, чтобы при их одновременном приведении в действие отклонять эти точки по-разному. В этом контексте понятие "гибкая управляющая поверхность" означает то, что по меньшей мере форма и/или протяженность или площадь поверхности управляющей поверхности является переменной, при этом управляющая поверхность имеет непрерывную форму (т.е., в частности, в ней отсутствуют зазоры или щели). Например, управляющая поверхность, по меньшей мере на отдельных участках, может быть вытянута по синусоиде либо может иметь иной волнообразный тонкий профиль. Неодинаковое отклонение точек приложения усилий позволяет управляющей поверхности упруго деформироваться без изломов контура, в частности в направлении размаха, при этом вдоль управляющей поверхности в направлении размаха образуются плавные переходы, например, к близлежащей конструкции (которой может быть, например, основная несущая поверхность). В частности, несмотря на различия в принципах регулирования положения смежных управляющих поверхностей, прилежащие друг к другу участки этих управляющих поверхностей могут отклоняться таким образом, чтобы в зоне зазора или промежутка между ними образовывать плавный переход. Это позволяет уменьшить вихри и шум, источником которых являются управляющие поверхности и ранее имевшиеся зазоры.
Кроме того, в случае заклинивания или отказа исполнительного механизма предлагаемая в изобретении управляющая поверхность благодаря своей гибкости по-прежнему по меньшей мере частично отклоняется с помощью оставшихся исполнительных механизмов, поскольку управляющая поверхность блокируется только в точке приложения усилий со стороны заклинившего исполнительного механизма. В случае заклинивания одного из исполнительных механизмов управляющая поверхность в значительной степени сохраняет работоспособность и не выходит полностью из строя, как в случае устройств, известных из уровня техники. Муфты для отключения от заклинившего исполнительного механизма не требуются, благодаря чему связанный с этим прирост массы, сложность конструкции и сложность управления малы по сравнению с обычными устройствами.
В предпочтительном варианте осуществления изобретения точки приложения усилий могут отклоняться таким образом, чтобы вызывать ее упругую деформацию на изгиб, кручение и/или искривление. Это позволяет подстраивать определяемую управляющей поверхностью составляющую аэродинамического качества (например, с точки зрения подъемной силы, аэродинамического сопротивления и момента тангажа) под конкретные условия. В частности, управляющую поверхность можно изгибать или закручивать в направлении размаха, т.е. в поперечном направлении относительно направления набегающего потока, и/или можно искривлять заднюю кромку управляющей поверхности по направлению набегающего потока или против него. Иными словами, управляющей поверхности может быть придана волнистость (например, по линии, подобной синусоиде) в направлении размаха. В случае основной несущей поверхности летательного аппарата это можно использовать для получения требуемого распределения подъемной силы, а также распределения нагрузки на крыло по размаху во время взлета, крейсерского полета и посадки летательного аппарата. Поэтому особенно целесообразно иметь возможность индивидуального приведения в действие исполнительных механизмов на отклонение управляющей поверхности посредством индивидуальных приводов. Это позволяет создать идеальные условия обтекания для любой ситуации.
Предлагаемая в изобретении управляющая поверхность, как правило, представляет собой закрылок, шарнирно установленный на задней кромке основной несущей поверхности летательного аппарата, но также может быть на летательном аппарате рулем направления, элероном, рулем высоты или аэродинамическим триммером. Разумеется, управляющая поверхность также может быть предкрылком, отклоняющимся носком или щитком и может устанавливаться в местах, в которых в настоящее время размещение управляющих поверхностей не предусмотрено, но ставится задача достижения конкретных аэродинамических эффектов или управления такими эффектами.
Закрылки необходимы для этапов взлета и посадки. Руль направления используется для поворота летательного аппарата относительно вертикальной оси, а элерон на задней кромке основной несущей поверхности обеспечивает движение летательного аппарата относительно продольной оси. Руль высоты используется для изменения углового положения летательного аппарата относительно поперечной оси, сопровождаемого изменением угла тангажа и угла атаки летательного аппарата. Аэродинамический триммер в хвостовой части летательного аппарата применяется для уменьшения аэродинамических шарнирных моментов, действующих на механизмы управления летательным аппаратом по тангажу. Предлагаемая в изобретении управляющая поверхность позволяет, таким образом, регулировать в полете профиль аэродинамического сопротивления и обтекания, на который оказывает влияние управляющая поверхность, в любом месте летательного аппарата. Разумеется, изобретение также в принципе осуществимо применительно к аэродинамическим управляющим поверхностям, которые не используются в качестве основных механизмов управления полетом летательного аппарата.
В соответствии с изобретением управляющая поверхность также может быть компонентом лопасти воздушного винта. Такие лопасти используются, например, в горизонтально расположенных (несущих) винтах вертолетов. Лопасти винта вертолета действуют аналогично вращающимся основным несущим поверхностям летательного аппарата с неподвижным крылом, что дает в принципе те же самые преимущества, что упомянуты выше применительно к летательному аппарату с неподвижным крылом. В этом случае управляющая поверхность также может представлять собой управляемый закрылок лопасти винта, шарнирно закрепленный на лопасти сзади по направлению обтекающего потока.
Лопасти, а также шарнирно закрепленные на них закрылки также могут использоваться в ветроэлектрической установке с вертикально расположенным ветроколесом для достижения требуемого аэродинамического сопротивления и уменьшения уровня шума.
Управляющую поверхность целесообразно изготавливать из волокнистого композиционного материала. В качестве основных компонентов подобного материала обычно выступают полимерная матрица и включенные в нее армирующие волокна. Подобному материалу можно придать требуемую эластичность и прочность, выбирая для конкретных направлений действия нагрузки подходящие материалы и/или ориентацию волокон, что позволяет особым образом влиять на поведение управляющей поверхности при деформации изгиба, кручения или искривления профиля, но при этом обеспечивая необходимую прочность.
Объектом изобретения также является соответствующий способ отклонения точек приложения усилий вышеописанной управляющей поверхности, при осуществлении которого при одновременном приведении в действие по меньшей мере двух исполнительных механизмов точки приложения усилий отклоняют по-разному. Это позволяет особым образом влиять на аэродинамическое сопротивление, привносимое управляющей поверхностью, и на соответствующий профиль обтекания.
В одном из частных вариантов осуществления изобретения точки приложения усилий двух смежных управляющих поверхностей отклоняются исполнительными механизмами таким образом, чтобы по меньшей мере один край из обращенных друг другу краев управляющих поверхностей изгибался в направлении соответственно другого края. Это дает в результате квазинепрерывный переход между смежными управляющими поверхностями, обеспечивая таким образом ослабление вихреобразования и уменьшение шума, создаваемого управляющими поверхностями. Это решение также положительно влияет на ослабление спутных вихрей, поскольку способствует их быстрому рассеиванию. Благодаря этому можно сократить расстояние между летательными аппаратами, летящими друг за другом, что позволяет увеличить интенсивность воздушного движения. Аналогичным образом квазинепрерывный переход можно обеспечить, например, между боковым краем управляющей поверхности и по существу жестким соединительным участком, на котором эта управляющая поверхность установлена.
Краткое описание чертежей
Другие особенности и технические достоинства изобретения раскрываются ниже в описании осуществления изобретения, сопровождаемом чертежами, на которых показано:
на фиг.1 - схематическое изображение в аксонометрии предлагаемой в изобретении управляющей поверхности с исполнительными механизмами,
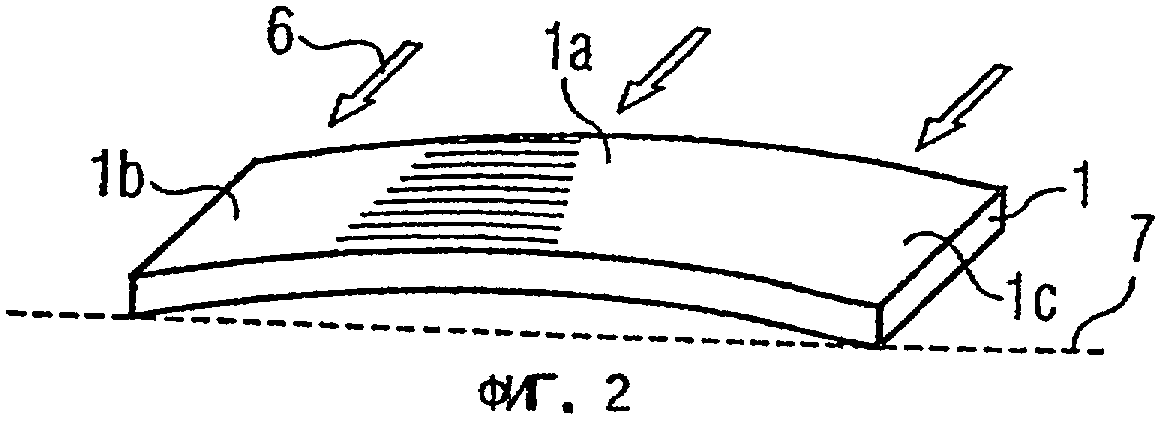
на фиг.2 - вид в аксонометрии управляющей поверхности, изогнутой в поперечном направлении относительно направления набегающего потока,
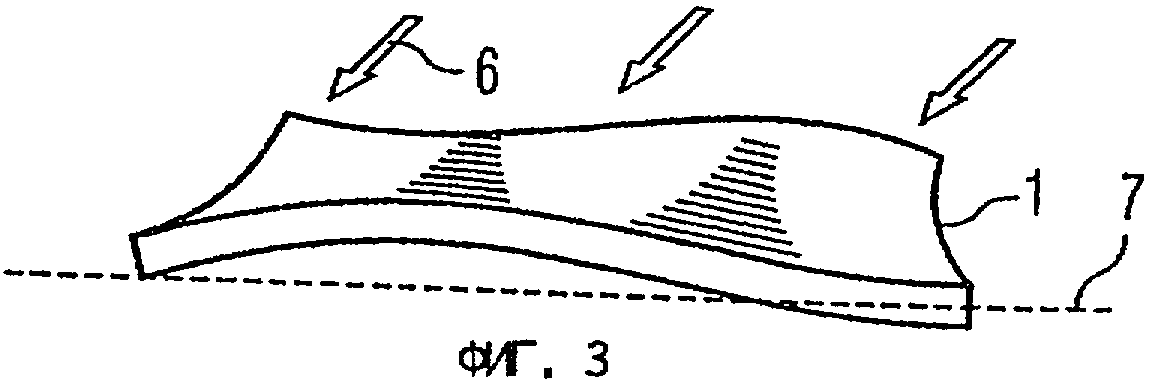
на фиг.3 - вид в аксонометрии управляющей поверхности, закрученной в поперечном направлении относительно направления набегающего потока,
на фиг.4 - вид в аксонометрии управляющей поверхности, выгнутой вперед по направлению набегающего потока,
на фиг.5 - вид в аксонометрии аэродинамического профиля, в частности основной несущей поверхности, с предлагаемой в изобретении управляющей поверхностью,
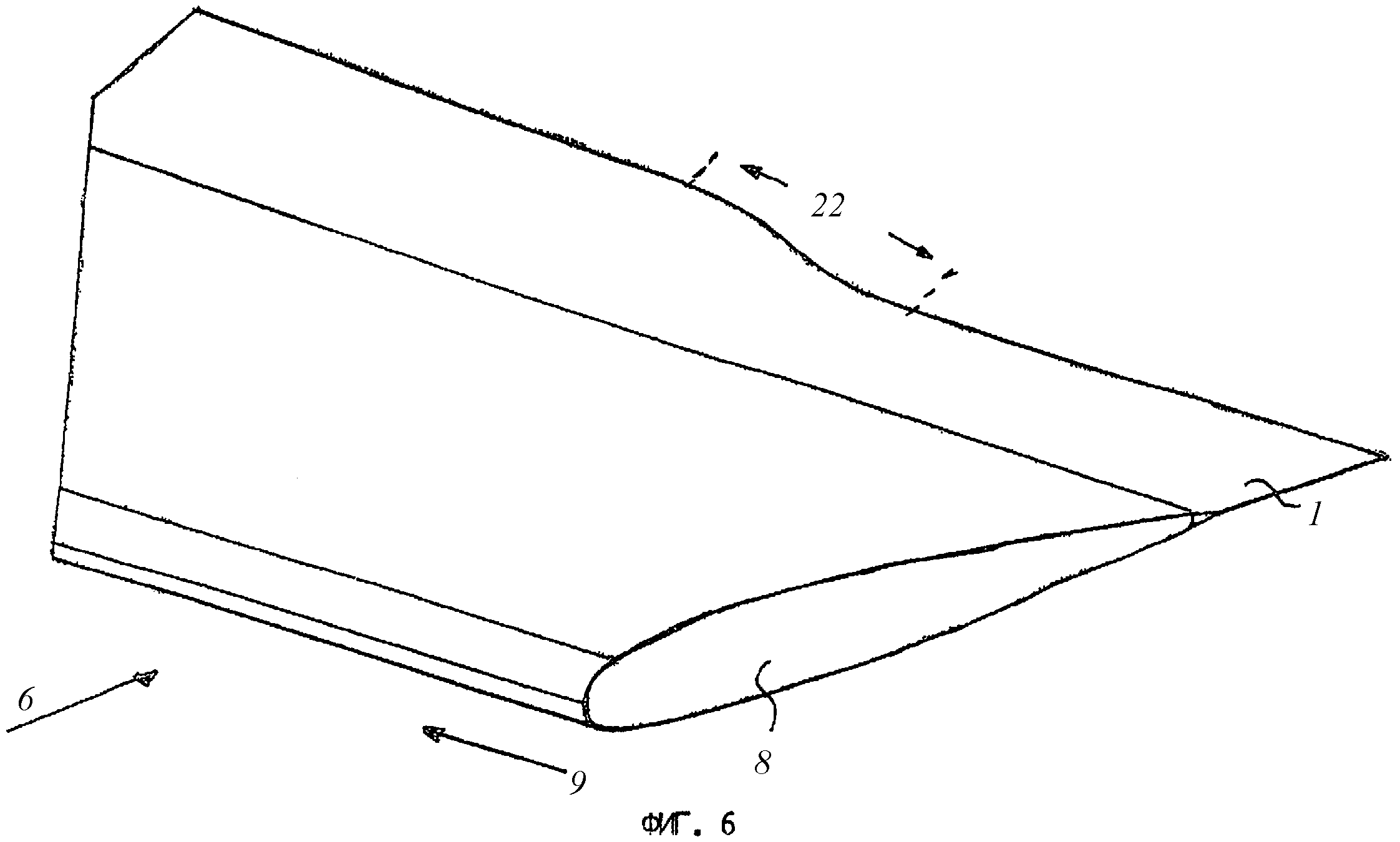
на фиг.6 - вид в аксонометрии еще одного аэродинамического профиля, в частности основной несущей поверхности, с предлагаемой в изобретении управляющей поверхностью,
на фиг.7 - вид в аксонометрии основной несущей поверхности летательного аппарата с двумя предлагаемыми в изобретении управляющими поверхностями, и
на фиг.8 - вид спереди двух управляющих поверхностей, отклоненных в соответствии с изобретением.
Осуществление изобретения
На фиг.1 представлено схематическое изображение предлагаемой в изобретении гибкой управляющей поверхности 1. Управляющая поверхность 1 имеет две точки 2 приложения усилий, на каждую из которых воздействует исполнительный механизм, или привод, 3. Подобный исполнительный механизм 3 обычно содержит двигатель 4 и передачу 5, например, для передачи линейного или вращательного движения. Двигатель может быть выполнен в виде генератора силы и движения, такого как электродвигатель, пьезокерамическое, пневматическое или гидравлическое устройство и т.п. Исполнительные механизмы 3 могут приводиться в действие таким образом, чтобы при их одновременном приведении в действие обеспечить различное отклонение ими точек 2 приложения усилий. Таким образом можно обеспечить упругую деформацию управляющей поверхности 1, направленную, например, вверх или вниз, в двух точках приложения усилий либо только в одной такой точке.
На фиг.2-4 показано несколько возможных деформированных состояний управляющей поверхности, которые также можно использовать в нужной комбинации друг с другом. На фиг.2 показана управляющая поверхность 1, изогнутая относительно оси, параллельной направлению 6 набегающего потока. Геометрический центр 1а управляющей поверхности 1 приподнялся над ее левым 1b и правым 1с краями, которые можно соединить друг с другом горизонтальной линией 7, проведенной пунктиром.
Управляющую поверхность 1 также можно деформировать через точки 2 приложения усилий, приложив к ней крутильную нагрузку (см. фиг.3). В случае управляющей поверхности 1, показанной на фиг.3, ось кручения проходит в поперечном направлении относительно направления 6 набегающего потока. Вместе с тем, ось кручения можно расположить на любой заданной оси, если это целесообразно для достижения требуемого эффекта обтекания (например, что касается подъемной силы, аэродинамического сопротивления, момента тангажа) и/или образования небольших завихрений потока.
Кроме того, управляющую поверхность 1 можно искривить таким образом, чтобы средний участок задней кромки 1d выдвинулся вперед относительно боковых краев 1b и 1с по направлению 6 набегающего потока (см. фиг.4). В рассматриваемом примере противоположная кромка 1е искривилась в направлении набегающего потока приблизительно в той же мере, что и задняя кромка 1d. Вместе с тем, во избежание образования зазора противоположная кромка также может быть жестко защемлена. Возможность придания управляющей поверхности 1 подобных деформаций в отношении изгиба, кручения и/или искривления зависит от высокой степени эластичности по заданным осям при одновременно высокой прочности, что достижимо, например, при изготовлении управляющей поверхности из волокнистого композиционного материала.
На фиг.5 и 6 показаны другие возможные деформированные состояния предлагаемой в изобретении управляющей поверхности. На фиг.5 показан аэродинамический профиль 8, например основная несущая поверхность или лопасть воздушного винта, на которой сзади по направлению обтекающего потока, т.е. по задней кромке профиля, расположена гибкая управляющая поверхность 1. На фиг.5 направление набегающего потока также обозначено позицией 6, а направление размаха - позицией 9. Исполнительные механизмы, деформирующие и/или отклоняющие гибкую управляющую поверхность 1, для наглядности не показаны. Гибкая управляющая поверхность 1 способна деформироваться на изгиб, кручение и/или искривление (изгиб в своей плоскости), как это описано при рассмотрении фиг.2-4, причем управляющая поверхность 1 по всей своей протяженности является плоской и сплошной, т.е. не имеет никаких зазоров, щелей или разрезов. В варианте осуществления изобретения, показанном на фиг.5, задняя кромка 12 управляющей поверхности 1 проходит по непрерывной линии волнистой формы.
На фиг.6 показан местный вид, иллюстрирующий еще одну возможность деформирования гибкой управляющей поверхности 1, которая расположена на аэродинамическом профиле 8, в частности основной несущей поверхности или лопасти воздушного винта, сзади по направлению обтекающего потока, по ее задней кромке. Как и на фиг.5, исполнительные механизмы, отклоняющие управляющую поверхность 1, для наглядности не показаны. Направление набегающего потока опять же обозначено позицией 6, и направление размаха - позицией 9. Гибкая управляющая поверхность 1, показанная на фиг, 6, справа от переходного участка 22 не отклонена, но на переходном участке 22 волнообразной формы плавно сопрягается с отклоненным участком (по левую сторону от переходного участка 22).
На фиг.7 представлен вид в аксонометрии основной несущей поверхности 8 летательного аппарата 21. Рядом друг с другом в направлении 9 размаха основной несущей поверхности 8 расположена группа исполнительных механизмов 3. В этом варианте пять исполнительных механизмов 3 воздействуют на первую управляющую поверхность 11, имеющую заднюю кромку 12 и переднюю кромку 13. Исполнительные механизмы в рассматриваемом варианте приводятся в действие таким образом, чтобы вызывать такую деформацию гибкой первой управляющей поверхности 11, при которой за счет плавности обводов без изломов, зазоров или выраженных граней на различных этапах полета, таких как взлет, крейсерский полет или посадка, достигается благоприятное распределение подъемной силы и нагрузки на крыло по размаху. Например, на участке, показанном на фиг.7, первая управляющая поверхность 11 изогнута и закручена в направлении размаха.
В показанной на фиг.7 компоновке рядом с первой управляющей поверхностью 11 предусмотрена вторая управляющая поверхность 14, имеющая заднюю кромку 15 и переднюю кромку 16, а также пять исполнительных механизмов 3, расположенных рядом друг с другом по размаху крыла и аналогичным образом воздействующих на вторую управляющую поверхность 14. Точки приложения усилий на второй управляющей поверхности 14 могут отклоняться с таким расчетом, например, чтобы сохранять как можно меньшим зазор 17 между основной несущей поверхностью 8 и второй управляющей поверхностью 14. С этой целью вторая управляющая поверхность 14 искривляется в направлении 6 набегающего потока. Любым по протяженности непрерывным участкам управляющих поверхностей 11 и 14 может быть придана волнообразная форма в направлении размаха.
В направлении размаха между первой управляющей поверхностью 11 и второй управляющей поверхностью 14 имеется промежуток 18, показанный на фиг.7 и 8. Для минимизации отрицательного влияния этого промежутка с точки зрения прироста аэродинамического сопротивления, повышенного вихреобразования и возбуждаемого, как следствие, шума точки приложения усилий двух расположенных рядом друг с другом управляющих поверхностей 11 и 14 могут отклоняться исполнительными механизмами таким образом, чтобы изогнуть по меньшей мере один край из обращенных друг к другу краев 11а, 14а соответствующих управляющих поверхностей 11, 14 в сторону соответственно другого края, обеспечив, таким образом, практически непрерывный переход между управляющими поверхностями. В случае показанных на фиг.8 управляющих поверхностей 11 и 14 два края 11а, 14а можно соединить друг с другом воображаемой прямой линией, образуя непрерывный переход между этими двумя управляющим поверхностями, благодаря чему в воздухе образуются лишь небольшие вихри. Разумеется, подобные квазинепрерывные переходы можно аналогичным образом организовать между одним краем управляющей поверхности и близлежащим жестким соединительным участком, который, например, интегрирован в основную несущую поверхность 8 (см. на фиг.7 участки, выделенные пунктирными кружками); это означает, что, например на фиг.8, управляющую поверхность 14 также можно заменить жестким соединительным участком.
На фиг.8 также показано нежелательное отклонение 19 первой управляющей поверхности 11, обусловленное, например, заклиниванием одного исполнительного механизма. Требуемое же отклонение 20 первой управляющей поверхности 11 обозначено пунктиром. Сравнение отклонения 20 и отклонения 19 выявляет несоответствие фактического профиля требуемому. Однако благодаря упругой податливости первой управляющей поверхности 11 на изгиб отклонение 19 приводит лишь к незначительному изменению контура первой управляющей поверхности 11, вследствие чего первая управляющая поверхность 11 большей частью по-прежнему эффективна в плане низкого вихреобразования и шумности.
В принципе, число исполнительных механизмов, приходящееся на каждую управляющую поверхность, не ограничено, что обеспечивает возможность деформации управляющей поверхности с очень тонкими градациями, причем не только в направлении размаха, но и в направлении набегающего потока.
В показанной на фиг.7 компоновке вместо двух управляющих поверхностей 11 и 14 можно также использовать единственную управляющую поверхность (как это в качестве примера показано на фиг.5 или 6), проходящую практически по всему размаху основной несущей поверхности 8 (например, от левого участка, отмеченного пунктирным кружком, до правого участка, отмеченного пунктирным кружком). В этом случае управляющая поверхность может деформироваться квазинепрерывно в месте перехода от одного бокового края управляющей поверхности к соединительному участку, как это описано со ссылкой на фиг.8. Рассмотренные выше гибкие управляющие поверхности 1, 11 и 14 позволяют устранить зазоры и промежутки, изломы или разрывы линий контура в местах перехода от управляющей поверхности к соответствующим жестким соединительным участкам, причем как в направлении размаха, так и в направлении набегающего потока.
Реферат
Гибкая управляющая поверхность (1, 11, 14) является по существу плоской в направлениях (9) размаха и набегающего потока (6), выполнена упругоэластичной и содержит исполнительные механизмы (3), воздействующие на управляющую поверхность (1, 11, 14) в разных точках приложения усилий, разнесенных в поперечном направлении относительно направления (6) набегающего потока. Механизмы (3) рассчитаны так, чтобы при одновременном приведении в действие отклонять точки (2) приложения усилий по-разному с обеспечением упругой деформации без изломов управляющей поверхности (1, 11, 14) в направлениях размаха (9) и набегающего потока (6). Изобретение направлено на ослабление вихрей и уменьшение шума. 3 н. и 16 з.п. ф-лы, 8 ил.
Формула
указанная по меньшей мере одна управляющая поверхность (1, 11, 14) расположена у задней кромки аэродинамического профиля (8),
в состоянии упругой деформации управляющая поверхность (1, 11, 14) имеет по меньшей мере частично непрерывную волнистую форму в направлении (9) размаха, и
в состоянии упругой деформации управляющая поверхность (1, 11, 14) образует квазинепрерывный переход к смежным управляющим поверхностям (1, 11, 14), близлежащим соединительным участкам (8) и/или примыкающим зазорам или промежуткам (17, 18).
Комментарии