Комбинированный летательный аппарат - RU2380276C2
Код документа: RU2380276C2
Чертежи



Описание
Настоящее изобретение относится к комбинированному летательному аппарату, содержащему фюзеляж, несущий винт и крыло.
Предпосылкой изобретения явилось желание создать совершенно новую концепцию комбинированного летательного аппарата, представляющего собой по возможности оптимальный компромисс между вертолетом и самолетом, имеющим неподвижное крыло. Эта концепция рассчитана, в первую очередь, но не исключительно, на небольшие, управляемые автоматически летательные аппараты типа разведывательных. Такие летательные аппараты описаны в WO 01/56879 А1 и WO 02/096752 А1.
Примеры вертолетов, имеющих несущий винт с втяжными крыльями, описаны в US 6062508 и 5240204. Другие известные летательные аппараты описаны в патентах US 1418248 и 4913376.
Целью изобретения является создание комбинированного летательного аппарата, который позволяет осуществлять плавное и неограниченно гибкое управление при переходе от режима движения с помощью несущего винта, т.е. вертолетного режима, к режиму движения с помощью неподвижного крыла, т.е. самолетному режиму движения.
Эта концепция улучшает управляемый переход по нескольким аспектам:
1) Совместное циклическое и общее управление системой несущего винта в течение всей фазы перехода, т.е. очень хорошее управление движениями крена, тангажа и по вертикали.
2) Регулирование вектора тяги в хвостовой части создает широкие возможности управления движением тангажа и движением рыскания.
3) Основные крылья с большим отношением сторон и регулируемыми динамическими поверхностями управления, которые в течение всей фазы перехода находятся под действием скошенного потока от несущего винта, обеспечивают очень хорошее управление движениями крена и рыскания.
Это обеспечивает управляемый и безопасный переход от режима движения с помощью несущего винта к режиму движения с помощью неподвижного крыла и наоборот, что дает возможность использовать:
1) эффективные свойства вертолета в сочетании с высокой скоростью, дальностью и временем действия, присущими самолету с неподвижным крылом;
2) эффективные свойства неподвижного крыла в сочетании с хорошими свойствами висения и медленного полета, присущими обычному вертолету, и возможностями вертикального взлета и посадки.
Согласно изобретению это достигается в комбинированном летательном аппарате описанного типа, отличающемся тем, что его крыло установлено на фюзеляже с возможностью поворота.
Несущий винт предпочтительно содержит кожух для приема его лопастей, которые могут вдвигаться и выдвигаться.
В одном варианте осуществления несущий винт может быть выполнен, как описано в патентной заявке Норвегии №20035350, где он конструктивно скомбинирован с крылом, причем активная часть лопастей несущего винта почти вдвое больше, чем предлагалось прежде. Это значит, что длина активной части лопасти несущего винта не только соответствует радиусу неподвижного кожуха или крыла, но фактически близка к диаметру. Целью применения вдвижных лопастей несущего винта в летательном аппарате такого типа является уменьшение лобового сопротивления на больших скоростях. Чем больше отношение между площадью несущего винта и площадью крыла, в которое втягиваются лопасти несущего винта, тем лучше, т.е. тем меньше, лобовое сопротивление.
Лопасти несущего винта предпочтительно выполнены с возможностью поворота вокруг их продольной оси относительно кожуха несущего винта.
В предпочтительных вариантах осуществления летательный аппарат имеет хвостовой винт, предпочтительно содержащий пропеллер, окруженный трубой. Труба снабжена одним или несколькими управляемыми стабилизаторами.
Крыло комбинированного летательного аппарата имеет соответствующие поверхности управления. Каждая половина крыла может иметь по выбору несколько поверхностей управления, действующих независимо друг от друга.
Другие цели, особенности и преимущества изобретения станут понятны из последующего описания предпочтительного варианта его осуществления, сопровождаемого чертежами, на которых:
фиг.1 схематично изображает в аксонометрии летательный аппарат согласно изобретению во время вертикального подъема;
фиг.2 схематично изображает летательный аппарат, показанный на фиг.1, во время ускорения при движении вперед со скоростью приблизительно 50 км/ч;
фиг.3 схематично изображает летательный аппарат, показанный на фиг.1, во время полета вперед со скоростью приблизительно 120 км/ч;
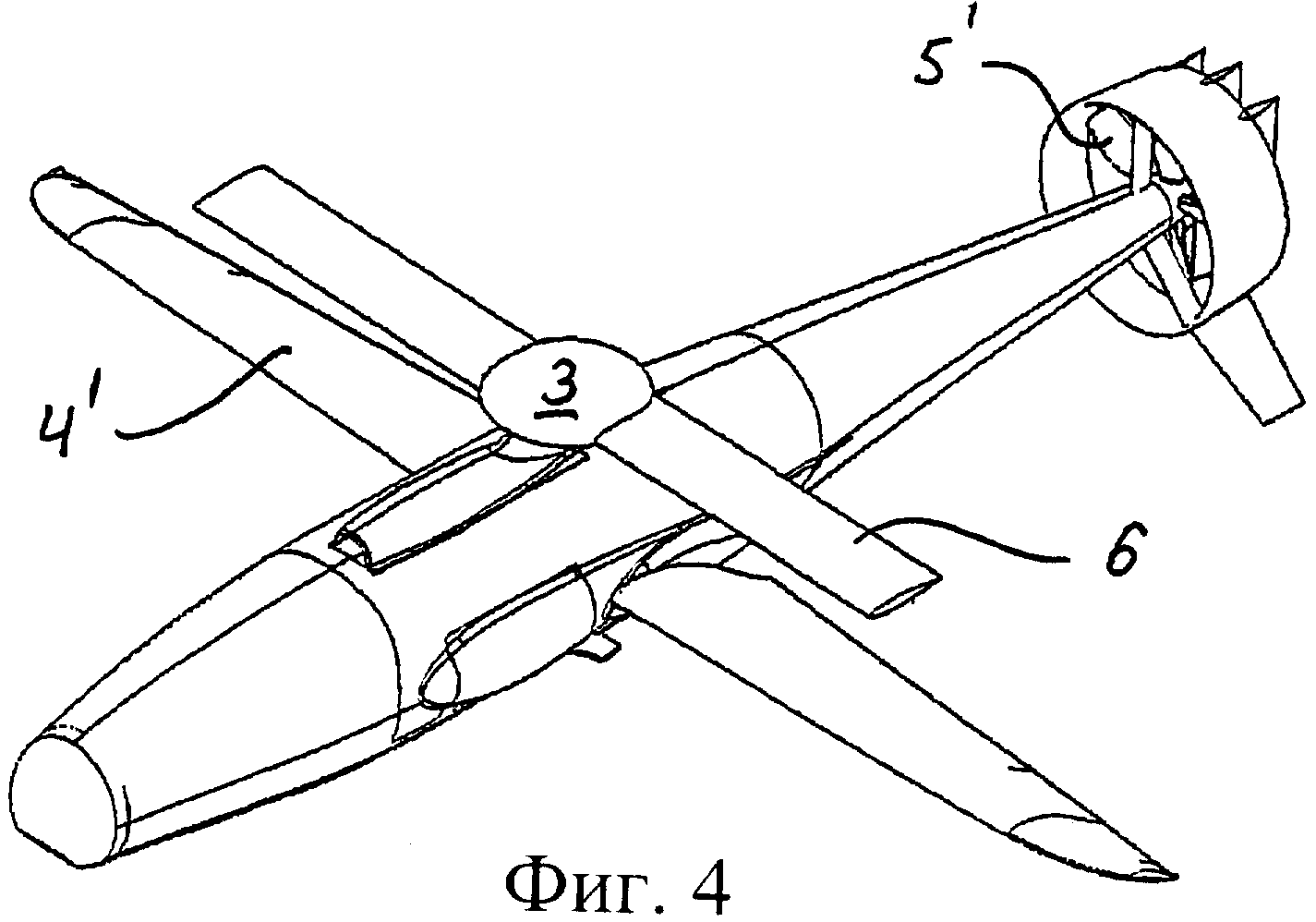
фиг.4 схематично изображает летательный аппарат, показанный на фиг.1, во время полета вперед со скоростью приблизительно 170 км/ч;
фиг.5 схематично изображает летательный аппарат, показанный на фиг.1, во время полета вперед со скоростью приблизительно 200 км/ч.
Далее со ссылками на фиг.1-5 комбинированный летательный аппарат 1 согласно изобретению описан более подробно на различных фазах его движения. Летательный аппарат содержит фюзеляж 2, основной несущий винт 3 и крыло 4. Основной несущий винт 3 имеет кожух 6, в котором размещен механизм (не показан) несущего винта, содержащий по меньшей мере две лопасти 7 несущего винта, которые могут полностью вдвигаться в кожух 6. Кожух 6 установлен с возможностью вращения вместе с лопастями 7. Лопасти 7 могут поворачиваться на небольшой угол вокруг их продольных осей относительно кожуха 6.
Летательный аппарат 1 содержит также хвостовой винт 5, создающий тягу для движения вперед. Хвостовой винт 5 содержит пропеллер 5', установленный с возможностью вращения внутри окружающей его трубы 9, снабженной выступающими управляемыми стабилизаторами 9' и стабилизирующими перьями 9".
На фиг.1 летательный аппарат 1 показан при вертикальном подъеме без существенного горизонтального движения вперед. Вертикальный подъем осуществляется основным несущим винтом 3, лопасти 7 которого полностью выдвинуты, как видно на фиг.1. Каждая половина 4' крыла установлена на фюзеляже 2 с возможностью поворота и на фиг.1 показана повернутой примерно на 90° относительно ее положения при нормальном полете. Каждая половина 4' крыла имеет поверхности 8 управления, которые могут путем дистанционного управления отклоняться на некоторый угол относительно этой половины 4' крыла для маневрирования летательного аппарата на различных фазах полета и в различных ситуациях. Во время вертикального подъема поверхности 8 обращены вниз и половины 4' крыла создают момент рыскания для противодействия моменту, создаваемому системой основного несущего винта. Следует также заметить, что хвостовой винт 5 создает дополнительный противодействующий момент рыскания.
Летательный аппарат 1 должен управляться по 6 степеням свободы с помощью следующего:
1) "Вертикальный подъем": Общий "шаг" основного несущего винта 3.
2) "Управление по крену": Циклический "шаг" основного несущего винта 3.
3) "Управление по тангажу": Циклический "шаг" основного несущего винта 3 + "регулирование вектора тяги в хвостовой части".
4) "Управление по рысканию": "Поворотные основные крылья с поверхностями управления" + "регулирование вектора тяги в хвостовой части".
5) "Тяга для движения вперед": "Циклический шаг" основного несущего винта 3 + "хвостовой пропеллер".
6) "Боковая сила": "Циклический шаг" основного несущего винта 3.
На фиг.2 летательный аппарат 1 показан во время начального ускорения вперед на скорости примерно 50 км/ч. Ускорение летательного аппарата 1 обеспечивается пропеллером 5', окруженным трубой, который расположен на заднем конце фюзеляжа 2. Основной несущий винт 3 осуществляет вертикальный подъем и основное управление движениями "тангажа" и "крена". Поворотные половины 4' крыла постепенно поворачиваются кверху в сторону положения полета, начиная создавать небольшую подъемную составляющую в воздушном потоке от основного несущего винта 3 и свободном воздушном потоке за счет скорости движения вперед.
Управление летательным аппаратом по 6 степеням свободы осуществляется с помощью следующего:
1) "Вертикальный подъем": Общий "шаг" основного несущего винта 3 + небольшое содействие от основного крыла..
2) "Управление по крену": Циклический "шаг" основного несущего винта 3.
3) "Управление по тангажу": Циклический "шаг" основного несущего винта 3 + "регулирование вектора тяги в хвостовой части".
4) "Управление по рысканию": "Поворотные основные крылья с поверхностями управления" + "регулирование вектора тяги в хвостовой части".
5) "Тяга для движения вперед": "Хвостовой пропеллер + "циклический шаг" основного несущего винта 3.
6) "Боковая сила": -
На фиг.3 показан летательный аппарат 1 на следующей фазе ускорения при движении вперед со скоростью примерно 120 км/ч. Ускорение летательного аппарата 1 по-прежнему обеспечивается пропеллером 5'. Основной несущий винт 3 теперь создает меньшую вертикальную подъемную силу, а его лопасти 7 наполовину вдвинуты в кожух 6 несущего винта. Поворотные половины 4' крыла еще больше повернуты кверху в сторону положения полета и создают примерно половину необходимой подъемной силы.
Управление летательным аппаратом по 6 степеням свободы осуществляется с помощью следующего:
1) "Вертикальный подъем": Основное крыло со средствами увеличения подъемной силы + общий "шаг" основного несущего винта 3.
2) "Управление по крену": Элероны + циклический "шаг" основного несущего винта 3.
3) "Управление по тангажу": Руль высоты + "регулирование вектора тяги в хвостовой части" + циклический "шаг" основного несущего винта 3.
4) "Управление по рысканию": "Вертикальная хвостовая часть / регулирование вектора тяги" + "поворотные основные крылья с поверхностями управления.
5) "Тяга для движения вперед": "Хвостовой пропеллер".
6) "Боковая сила":
На фиг.4 показан летательный аппарат 1 на следующей фазе ускорения вперед на скорости примерно 170 км/ч. Ускорение летательного аппарата 1 по-прежнему обеспечивается пропеллером 5'. Основной несущий винт 3 теперь создает минимальную вертикальную подъемную силу, а его лопасти 7 полностью вдвинуты в кожух 6 несущего винта. Кожух 6 постепенно замедляет свое вращение и останавливается. Поворотные половины 4' крыла еще больше повернуты кверху в сторону положения полета и создают большую часть необходимой подъемной силы.
Управление летательным аппаратом 1 по 6 степеням свободы осуществляется с помощью следующего:
1) "Вертикальный подъем": Основное крыло со средствами увеличения подъемной силы + общий "шаг" основного несущего винта 3.
2) "Управление по крену": "Элероны".
3) "Управление по тангажу": Руль высоты + "регулирование вектора тяги в хвостовой части".
4) "Управление по рысканию": "Вертикальная хвостовая часть/регулирование вектора тяги".
5) "Тяга для движения вперед": "Хвостовой пропеллер".
6) "Боковая сила":
На фиг.5 показан летательный аппарат 1 во время установившегося плавного полета со скоростью примерно 200 км/ч. Летательный аппарат 1 движется вперед с помощью окруженного трубой пропеллера 5' и в принципе летит так же, как обычный самолет с неподвижным крылом. Кожух 6 остановлен в положении, перпендикулярном к фюзеляжу 2, а лопасти 7 по-прежнему полностью вдвинуты в кожух 6. Поворотные половины 4' крыла полностью повернуты кверху в положение полета и создают всю необходимую подъемную силу. При полете вперед кожух 6 сбалансирован так, что создается минимальное лобовое сопротивление. Во время полета кожух 6 не участвует в создании подъемной силы.
Управление летательным аппаратом по 6 степеням свободы осуществляется с помощью следующего:
1) "Вертикальный подъем": Основное крыло.
2) "Управление по крену": "Элероны".
3) "Управление по тангажу": Руль высоты + "регулирование вектора тяги в хвостовой части".
4) "Управления по рысканию": "Вертикальная хвостовая часть/ регулирование вектора тяги".
5) "Тяга для движения вперед": "Хвостовой пропеллер".
6) "Боковая сила".
Реферат
Изобретение относится к комбинированному летательному аппарату. Комбинированный летательный аппарат содержит удлиненный фюзеляж, несущий винт с лопастями для создания подъемной силы и крыльевую часть, выступающую от каждой стороны фюзеляжа. Каждая крыльевая часть установлена на фюзеляже с возможностью поворота вокруг ее продольной оси. Несущий винт имеет кожух для размещения вдвижных и выдвижных лопастей несущего винта. Достигается увеличение плавности управления летательного аппарата при переходе от режима движения с помощью несущего винта к режиму движения с помощью неподвижного крыла. 6 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Комбинированный летательный аппарат
Комментарии