Механизм позиционирования фюзеляжа (варианты), летательный аппарат и способ балансировки летательного аппарата (варианты) - RU2695754C1
Код документа: RU2695754C1
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к летательным аппаратам, а в частности, к летательным аппаратам, имеющим сдвижные крылья для управления весом и балансировкой путем смещения центра тяжести летательного аппарата относительно центра подъемной силы для компенсации веса и положения полезной нагрузки без необходимости использования балласта или с уменьшением потребности в балласте.
УРОВЕНЬ ТЕХНИКИ
[002] Вес и балансировка летательного аппарата являются наиболее важными факторами, влияющими на безопасность полетов. Летательный аппарат, центр тяжести которого находится вне допустимых пределов относительно центра подъемной силы летательного аппарата, является неэффективным и опасным для полетов. Ответственность за надлежащий контроль за весом и балансировкой начинается с инженеров и проектировщиков, которые проектируют летательный аппарат, и распространяется на авиационного техника, который обслуживает летательный аппарат, на старшего по погрузочно-разгрузочным работам, который несет ответственность за загрузку полезной нагрузки и топлива на борт летательного аппарата, и, в конечном счете, на пилота, который управляет летательным аппаратом
[003] Два элемента имеют жизненно важное значение при определении веса и балансировки летательного аппарата: общий вес летательного аппарата, который не должен превышать максимальной общей массы, допустимой для конкретного типа и конкретной модели летательного аппарата и конкретных видов полетов, которые он должен выполнить; и местоположение его центра тяжести, или точки, в которой, как считается, сконцентрирован весь вес летательного аппарата, относительно его центра подъемной силы или средней аэродинамической хорды, который должен или которая должна всегда находиться в пределах допустимого диапазона для конкретного рабочего веса летательного аппарата. Вес и центр тяжести определяют стабильность, управление, эффективность и другие характеристики полета летательного аппарата. В ранее известных летательных аппаратах, когда центр тяжести выходит за допустимый диапазон относительно центра подъемной силы, добавляют балласт для балансировки летательного аппарата. Балласт имеет вес и находится в месте, расположенном внутри летательного аппарата, которое перемещает центр тяжести в положение, находящееся в пределах допустимого диапазона относительно центра подъемной силы. Хотя балласт позволяет осуществить балансировку летательного аппарата, балласт отрицательно влияет на полезную нагрузку и количество топлива, которое может брать с собой летательный аппарат, когда он приближается к максимальным пределам взлетного веса. Увеличение веса летательного аппарата без положительного влияния на способность нести топливо или полезную нагрузку приводит к общему уменьшению возможностей и эффективности летательного аппарата.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[004] В одном из аспектов настоящего изобретения раскрыт летательный аппарат. Летательный аппарат включает в себя фюзеляж, имеющий продольную ось, узел крыла и механизм позиционирования фюзеляжа, функционально соединяющий фюзеляж с узлом крыла. Механизм позиционирования фюзеляжа выполнен с возможностью перемещения фюзеляжа относительно узла крыла в продольном направлении параллельно продольной оси между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа.
[005] Еще в одном аспекте настоящего изобретения раскрыт способ балансировки летательного аппарата. Летательный аппарат включает в себя фюзеляж и узел крыла, установленный на нем, для перемещения фюзеляжа относительно узла крыла в продольном направлении, которое параллельно продольной оси фюзеляжа, между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа. Способ включает подготовку летательного аппарата к полету, определение положения центра тяжести летательного аппарата вдоль продольной оси, определение, находится ли центр тяжести в допустимом диапазоне продольных расстояний от центра подъемной силы летательного аппарата, и регулировку продольного положения фюзеляжа с переводом центра тяжести в допустимый диапазон продольных расстояний от центра подъемной силы при определении того, что центр тяжести не находится в допустимом диапазоне продольных расстояний от центра подъемной силы.
[006] Еще в одном аспекте настоящего изобретения раскрыт механизм позиционирования фюзеляжа для перемещения фюзеляжа летательного аппарата относительно узла крыла летательного аппарата в продольном направлении, которое параллельно продольной оси фюзеляжа. Механизм позиционирования фюзеляжа включает в себя направляющую позиционирования фюзеляжа, установленную на фюзеляже параллельно продольной оси, и узел кулачкового держателя, установленный на направляющей позиционирования фюзеляжа и выполненный с возможностью перемещения на ней между множеством отдельных положений в продольном направлении. Узел кулачкового держателя функционально соединен с узлом крыла, так что перемещение узла кулачкового держателя вдоль направляющей позиционирования фюзеляжа способствует перемещению фюзеляжа в продольном направлении между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа.
[007] Дополнительные аспекты настоящего изобретения определены в формуле изобретения в данном документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[008] На ФИГ. 1 приведен изометрический вид летательного аппарата с фюзеляжем и узлом крыла в соответствии с раскрытием настоящего изобретения;
[009] на ФИГ. 2 приведен вид сбоку летательного аппарата по ФИГ. 1 без полезной нагрузки и с фюзеляжем в первом продольном положении относительно узла крыла;
[0010] на ФИГ. 3 приведен вид сбоку летательного аппарата по ФИГ. 1 с полезной нагрузкой внутри фюзеляжа и фюзеляжем в первом продольном положении;
[0011] на ФИГ. 4 приведен вид сбоку летательного аппарата по ФИГ. 1 с полезной нагрузкой внутри фюзеляжа и фюзеляжем во втором продольном положении относительно узла крыла;
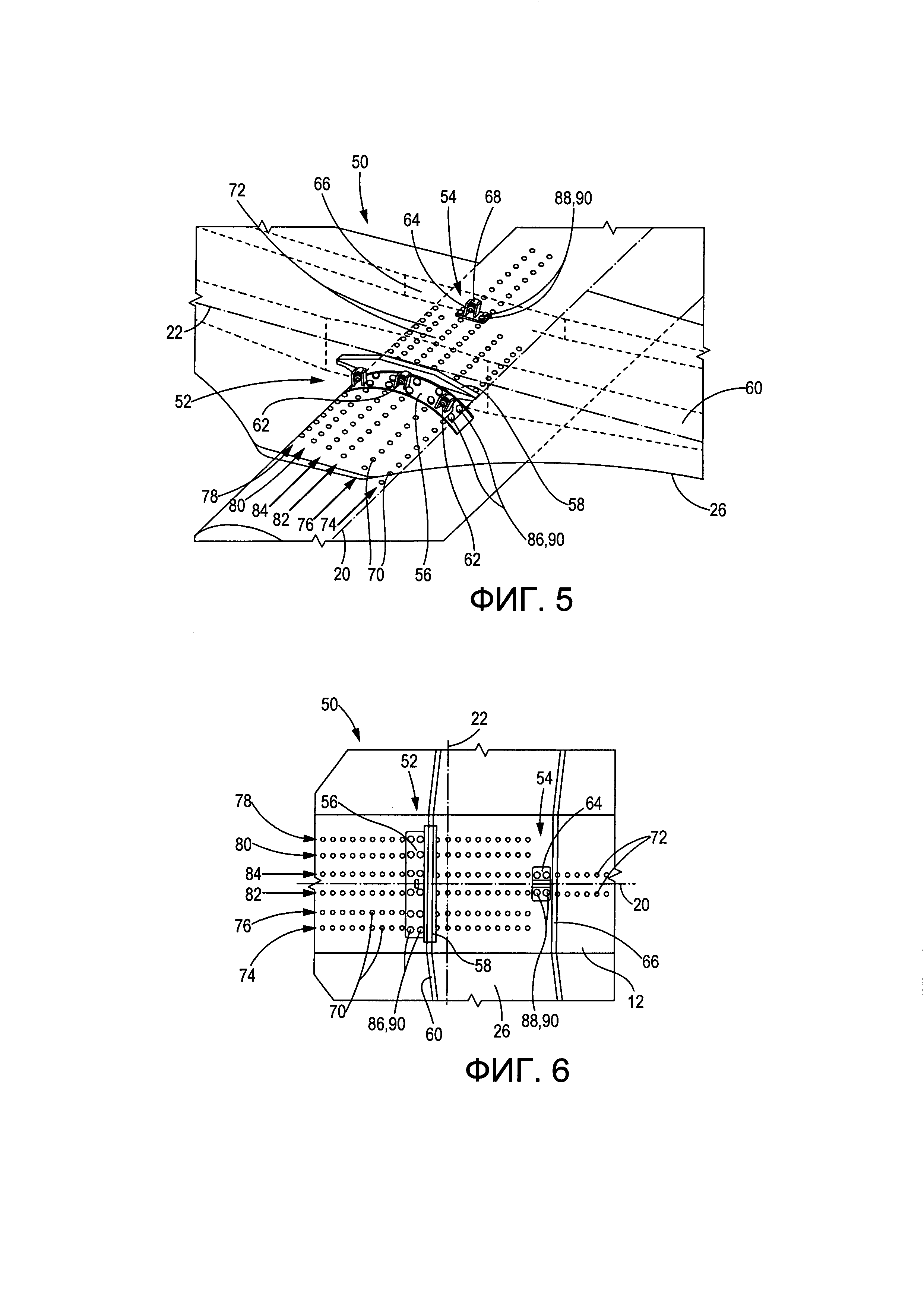
[0012] на ФИГ. 5 приведен увеличенный изометрический вид центральной части летательного аппарата по ФИГ. 1 с прозрачным центральным крылом, чтобы показать вариант реализации механизма позиционирования фюзеляжа в соответствии с раскрытием настоящего изобретения;
[0013] на ФИГ. 6 приведен вид сверху центральной части летательного аппарата по ФИГ. 1 с прозрачным центральным крылом, чтобы показать механизм позиционирования фюзеляжа по ФИГ. 5;
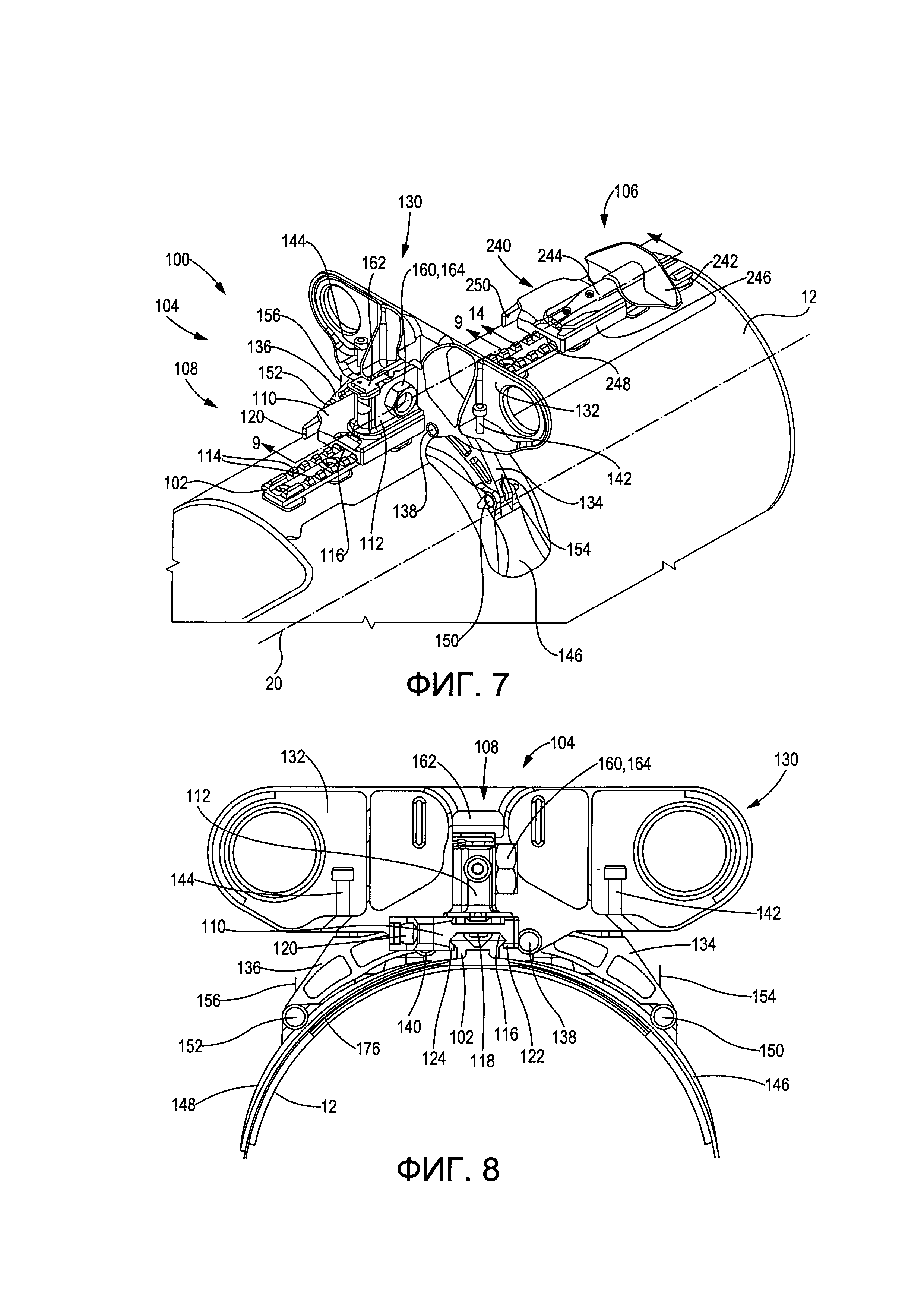
[0014] на ФИГ. 7 приведен увеличенный изометрический вид центральной части летательного аппарата по ФИГ. 1 с удаленным узлом крыла, чтобы показать альтернативный вариант реализации механизма позиционирования фюзеляжа в соответствии с раскрытием настоящего изобретения;
[0015] на ФИГ. 8 приведен вид спереди центральной части летательного аппарата по ФИГ. 1 с удаленным узлом крыла, чтобы показать механизм позиционирования фюзеляжа по ФИГ. 7;
[0016] на ФИГ. 9 приведен вид в разрезе центральной части летательного аппарата, выполненном по линии 9-9 по ФИГ. 7 и показывающем передний узел соединения крыла механизма позиционирования фюзеляжа по ФИГ. 7 с узлом кулачкового держателя, зафиксированным относительно узла нервюрного элемента придания поперечной устойчивости центральному крылу и относительно направляющей позиционирования фюзеляжа;
[0017] на ФИГ. 10 приведен вид в разрезе летательного аппарата по ФИГ. 9 с узлом кулачкового держателя, расфиксированным относительно узла нервюрного элемента придания поперечной устойчивости центральному крылу и расфиксированным относительно направляющей позиционирования фюзеляжа;
[0018] на ФИГ. 11 приведен вид в разрезе летательного аппарата по ФИГ. 9 с узлом кулачкового держателя, зафиксированным в определенном положении на направляющей позиционирования фюзеляжа и расфиксированным относительно узла нервюрного элемента придания поперечной устойчивости центральному крылу;
[0019] на ФИГ. 12 приведен вид в разрезе летательного аппарата по ФИГ. 9 с узлом кулачкового держателя, зафиксированным в определенном положении на направляющей позиционирования фюзеляжа и в первом состоянии фиксации на узле нервюрного элемента придания поперечной устойчивости центральному крылу;
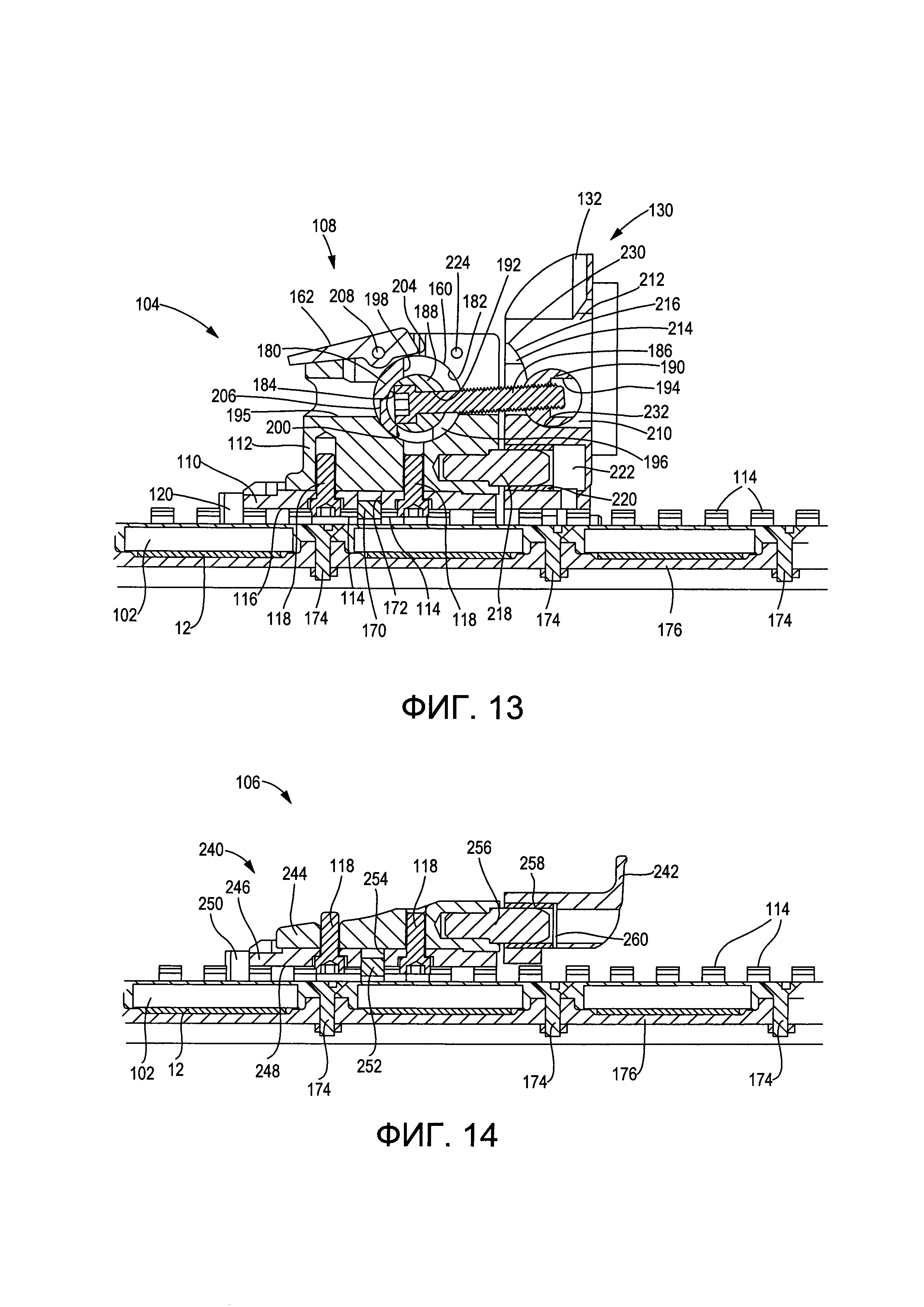
[0020] на ФИГ. 13 приведен вид в разрезе летательного аппарата по ФИГ. 9 с узлом кулачкового держателя, зафиксированным в определенном положении на направляющей позиционирования фюзеляжа и в промежуточном состоянии фиксации на узле нервюрного элемента придания поперечной устойчивости центральному крылу;
[0021] на ФИГ. 14 приведен вид в разрезе центральной части летательного аппарата, выполненном по линии 14-14 по ФИГ. 7 и показывающем задний узел соединения крыла механизма позиционирования фюзеляжа по ФИГ. 7;
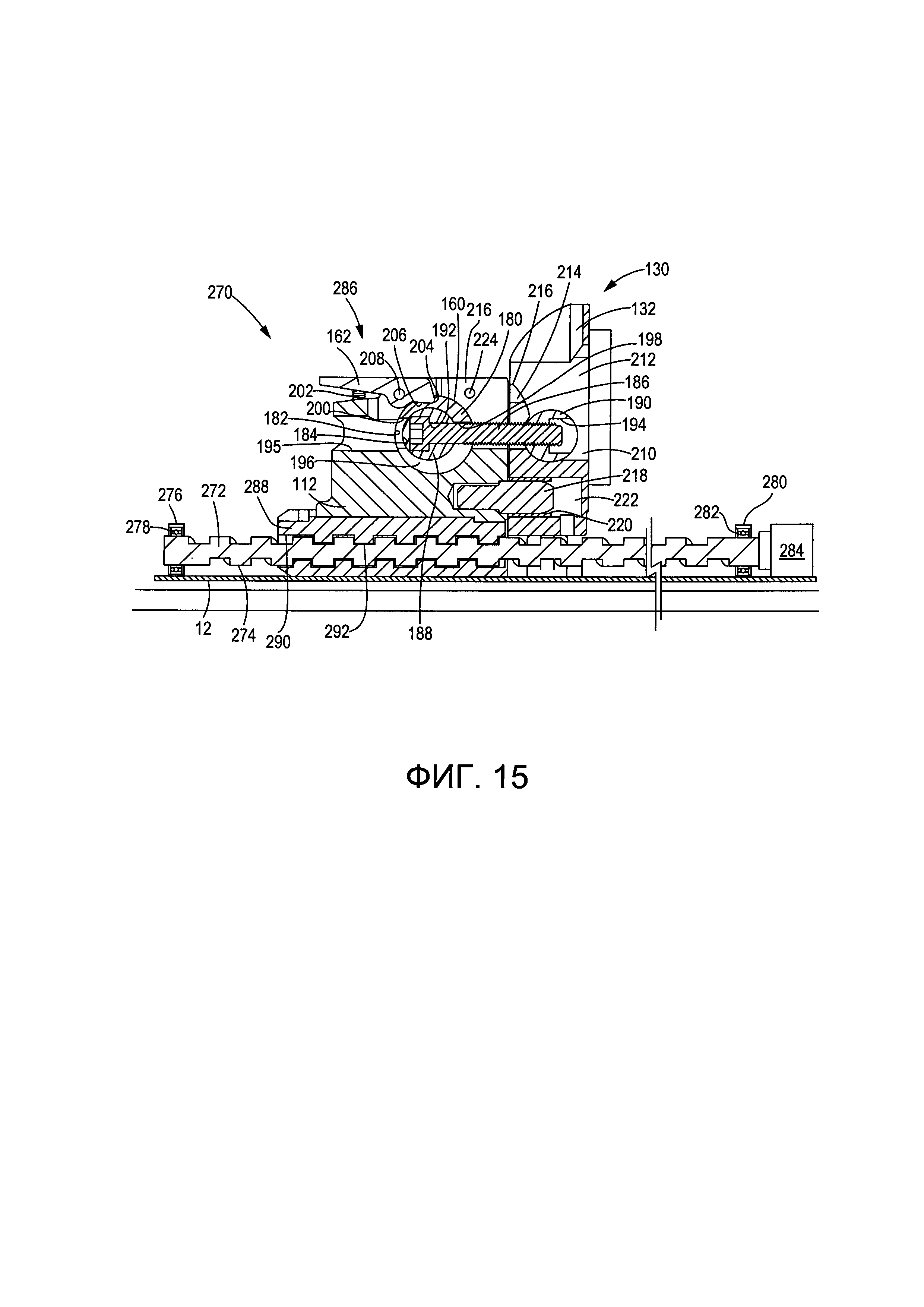
[0022] на ФИГ. 15 приведен вид в разрезе летательного аппарата по ФИГ. 9 с еще одним альтернативным вариантом реализации механизма позиционирования фюзеляжа, имеющего винтовой вал, установленный с возможностью вращения на фюзеляже, и передний узел соединения крыла с узлом кулачкового держателя, имеющим основание кулачкового держателя, принимающее винтовой вал и взаимодействующее с винтовым валом; и
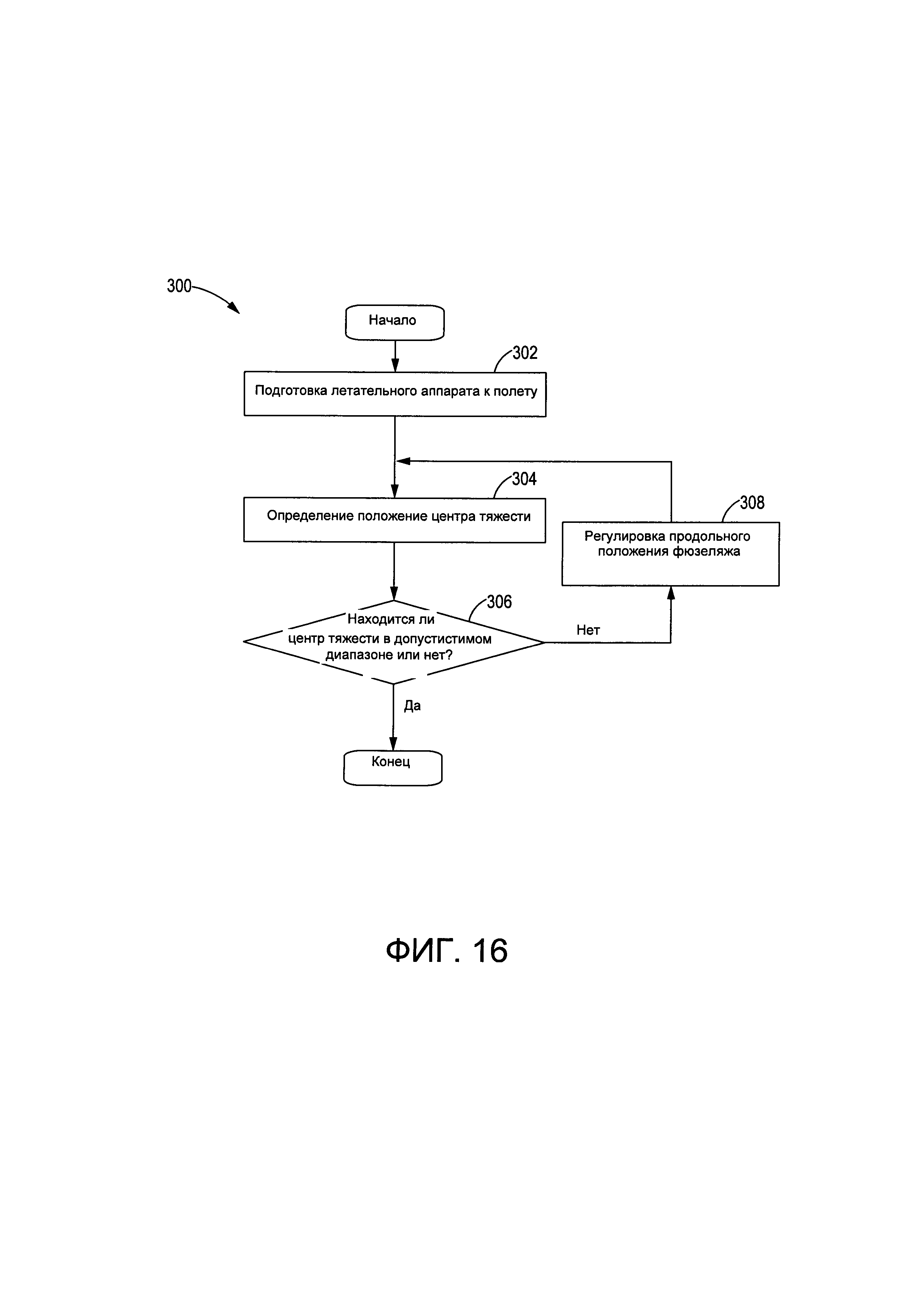
[0023] на ФИГ. 16 приведена блок-схема операции балансировки летательного аппарата в соответствии с раскрытием настоящего изобретения для позиционирования узла крыла летательного аппарата по ФИГ. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0024] На ФИГ. 1 показан приведенный в качестве примера летательный аппарат 10 в виде беспилотного летательного аппарата (БПЛА) 10, или дрона, в котором может быть выполнен сдвижной фюзеляж в соответствии с раскрытием настоящего изобретения. В иллюстративном примере летательный аппарат 10 может включать в себя фюзеляж 12 с носом 14 на переднем конце и хвостом 16 с корпусом двигателя на заднем конце для привода пропеллера 18 и создания тяги для летательного аппарата 10. Продольная ось 20 проходит через фюзеляж 12 от носа 14 до хвоста 16, а поперечная ось 22, перпендикулярная продольной оси 20, проходит от законцовки крыла до законцовки крыла. Летательный аппарат 10 также включает в себя узел 24 крыла, образованный центральным крылом 26, имеющим левое крыло 28 и правое крыло 30, проходящие наружу от него в поперечном направлении, и левую балку 32 и правую балку 34, проходящие назад и имеющие хвостовое крыло 36, установленное между ними. Фюзеляж 12 может быть установлен на узле 24 крыла таким образом, чтобы обеспечить возможность перемещения фюзеляжа 12 вперед и назад параллельно продольной оси 20. Положение фюзеляжа 12 может быть использовано для балансировки летательного аппарата 10 и размещения центра тяжести летательного аппарата 10 в допустимом диапазоне расстояний от центра подъемной силы, создаваемой узлом 24 крыла, при добавлении полезной нагрузки в летательный аппарат 10 или ее удаления из летательного аппарата 10, что вызывает смещение центра тяжести в положение, в котором центр тяжести летательного аппарата 10 находится слишком далеко впереди или слишком далеко позади относительно центра подъемной силы.
[0025] На ФИГ. 2-4 показаны рабочие принципы позиционирования фюзеляжа 12 относительно узла 24 крыла в соответствии с раскрытием настоящего изобретения. ФИГ. 2 может представлять летательный аппарат 10 перед добавлением полезной нагрузки, подлежащей транспортировке во время полета. В настоящем примере для ясности центр 40 тяжести летательного аппарата 10 расположен вдоль продольной оси 20 и центрирован на поперечной оси 22. Центр 42 подъемной силы летательного аппарата 10 находится там, где уравновешивается общая сумма всех подъемных сил, создаваемых компонентами летательного аппарата 10. Центр 42 подъемной силы главным образом определяется подъемной силой крыльев 26, 28, 30, 38, однако другие управляющие поверхности и аэродинамические части фюзеляжа 12 также влияют на величину и местоположение центра 42 подъемной силы. В этом примере центр 42 подъемной силы имеет известное местоположение в узле 24 крыла. Положение центра 40 тяжести относительно центра 42 подъемной силы будет определять характеристики полета летательного аппарата 10. В целом, центр 40 тяжести должен быть расположен вдоль продольной оси 20 в допустимом диапазоне 44 продольных расстояний от центра 42 подъемной силы. Продольные положения центра 40 тяжести вне допустимого диапазона 44 приведут к нестабильному полету. Как показано на ФИГ. 2, с узлом 24 крыла в первом продольном положении, центр 40 тяжести находится впереди центра 42 подъемной силы, но в допустимом диапазоне 44.
[0026] На ФИГ. 3 показан летательный аппарат 10 после загрузки полезной нагрузки 46 в фюзеляж 12. Полезная нагрузка 46 находится впереди относительно положения центра 40 тяжести по сравнению с пустым летательным аппаратом 10, как показано на ФИГ. 2. Как показано на чертежах, полезная нагрузка 46 имеет достаточную массу для смещения центра 40 тяжести вперед вдоль продольной оси 20 и за пределы допустимого диапазона 44 центра 40 тяжести относительно центра 42 подъемной силы. В известных летательных аппаратах, в которых продольное положение фюзеляжа зафиксировано относительно крыльев, в летательный аппарат обычно добавляли балласт позади центра 40 тяжести для перемещения центра 40 тяжести назад, чтобы сбалансировать летательный аппарат и получить необходимые характеристики полета. Балансировка выполняется за счет снижения эффективности использования топлива вследствие дополнительного веса балласта. Однако в летательном аппарате 10 в соответствии с раскрытием настоящего изобретения фюзеляж 12 и, соответственно, центр 40 тяжести могут быть перемещены назад вдоль продольной оси 20 посредством соответствующего механизма позиционирования фюзеляжа в соответствии с раскрытием настоящего изобретения в положение, показанное на ФИГ. 4, в котором центр 40 тяжести снова находится в допустимом диапазоне 44 относительно центра 42 подъемной силы. В результате, летательный аппарат 10 может иметь желаемые рабочие характеристики без ущерба для топливной эффективности вследствие дополнительного веса балласта.
[0027] На ФИГ. 5 и 6 показан первый вариант реализации летательного аппарата 10 с механизмом 50 позиционирования фюзеляжа, обеспечивающим возможность регулировки продольного положения фюзеляжа 12 относительно узла 24 крыла. Со ссылкой на ФИГ. 5, центральное крыло 26 является прозрачным, чтобы открыть компоненты механизма 50 позиционирования фюзеляжа. Показанный механизм 50 позиционирования фюзеляжа включает в себя передний узел 52 соединения крыла и задний узел 54 соединения крыла. Передний узел 52 соединения крыла включает в себя держатель 56 фюзеляжа, форма которого соответствует контуру наружной поверхности фюзеляжа 12, и крыльевую нервюру 58, установленную на ней. Крыльевая нервюра 58, в свою очередь, установлена на опорной конструкции центрального крыла 26, такой как передний шпангоут 60 для центрального крыла, так что передний узел 52 соединения крыла неподвижен относительно узла 24 крыла.
Крыльевая нервюра 58 может быть соединена с держателем 56 фюзеляжа двумя или более работающими на сдвиг (sheer) штифтами 62. Задний узел 54 соединения крыла включает в себя задний держатель 64 работающих на сдвиг штифтов, соединенный с опорной конструкцией центрального крыла 26, такой как задний шпангоут 66 для центрального крыла, одним или более работающими на сдвиг штифтами 68, так что задний узел 54 соединения крыла также неподвижен относительно узла 24 крыла. При таком расположении работающие на сдвиг штифты 62, 68 могут выдерживать все сдвижные усилия, создаваемые во время полета летательного аппарата 10 силами, воздействующими на фюзеляж 12 и узел 24 крыла и стремящимися переместить компоненты в противоположных направлениях.
[0028] Положение фюзеляжа 12 может быть изменено посредством обеспечения ряда отверстий 70, 72, проходящих через фюзеляж 12 с выравниванием параллельно продольной оси 20. Как лучше всего показано на виде сверху по ФИГ. 6, монтажные отверстия 70 для держателя фюзеляжа расположены в два ряда 74, 76 с левой стороны фюзеляжа 12 и в два ряда 78, 80 с правой стороны фюзеляжа 12. Отверстия 72 для держателя работающих на сдвиг штифтов расположены в два ряда 82, 84 на верхней части фюзеляжа 12 и охватывают осевую линию фюзеляжа 12. Соответствующие отверстия 86, 88 на держателе 56 фюзеляжа и заднем держателе 64 работающих на сдвиг штифтов расположены на расстоянии друг от друга для выравнивания с отверстиями 70, 72 в множестве отдельных положений, в которых узел 24 крыла может быть установлен на фюзеляже 12. Крепежные элементы 90 могут выступать из внутренней части фюзеляжа 12 через отверстия 70, 72, 86, 88, когда фюзеляж 12 расположен так, что узел 24 крыла может быть прикреплен с занятием минимального пространства внутри фюзеляжа 12 и с предотвращением повреждения компонентов внутри фюзеляжа 12.
[0029] При размещении полезной нагрузки 46 (ФИГ. 3 и 4) внутри фюзеляжа 12 наземный персонал, готовящий летательный аппарат 10 к полету, может оценить и определить, смещено ли положение центра 40 тяжести летательного аппарата 10 вдоль продольной оси 20 и если да, находится ли смещенный центр 40 тяжести летательного аппарата 10 в допустимом диапазоне 44 расстояний от центра 42 подъемной силы. Как раскрыто выше, в известных летательных аппаратах в фюзеляж 12 помещают дополнительный балласт для уравновешивания полезной нагрузки и перемещения центра тяжести летательного аппарата обратно в пределы допустимого расстояния от центра подъемной силы.
С помощью механизма 50 позиционирования фюзеляжа в соответствии с раскрытием настоящего изобретения уменьшается или устраняется потребность в балласте за счет смещения центра 40 тяжести летательного аппарата 10 к центру 42 подъемной силы узла 24 крыла для балансировки сил во время полета без дополнительного увеличения веса летательного аппарата 10. Например, если полезная нагрузка расположена впереди нормального центра 40 тяжести летательного аппарата 10, фюзеляж 12 может быть перемещен назад и закреплен в самых задних отверстиях 70, 72 для изменения положения центра 40 тяжести, и наоборот. Если центр 40 тяжести летательного аппарата 10 все еще находится за пределами допустимого диапазона 44 от центра 42 подъемной силы после перемещения фюзеляжа в максимально переднее или заднее положение, может быть изменено положение полезной нагрузки 46 внутри фюзеляжа 12, или может быть добавлен балласт, хотя количество балласта вряд ли будет меньше, чем это необходимо для сравнимого летательного аппарата, в котором положение фюзеляжа 12 не может быть отрегулировано.
[0030] На ФИГ. 7 и 8 показан альтернативный вариант реализации механизма 100 позиционирования фюзеляжа, обеспечивающего возможность регулировки местоположения фюзеляжа 12 с перемещением между множеством отдельных положений без необходимости доступа во внутреннюю часть фюзеляжа 12 для удаления и переустановки крепежных элементов 90 механизма 50 позиционирования фюзеляжа. Механизм 100 позиционирования фюзеляжа использует систему направляющих, такую как система направляющих Пикатинни, установленная на верхней части фюзеляжа 12. Со ссылкой на ФИГ. 7, на которой узел 24 крыла удален для наглядности, механизм 100 позиционирования фюзеляжа, как показано на чертежах, включает в себя направляющую 102 позиционирования фюзеляжа, установленную на фюзеляже 12, передний узел 104 соединения крыла на переднем конце механизма 100 позиционирования фюзеляжа и задний узел 106 соединения крыла на заднем конце механизма 100 позиционирования фюзеляжа. Передний узел 104 соединения крыла включает в себя узел 108 кулачкового держателя, имеющий основание 110 кулачкового держателя, выполненное с возможностью скольжения по направляющей 102 позиционирования, и кулачковый держатель 112, установленный на нем. Направляющая 102 позиционирования имеет множество зубцов 114, расположенных на равных расстояниях друг от друга в двух рядах параллельно продольной оси 20 фюзеляжа 12. Направляющая 102 позиционирования имеет в целом Т-образное поперечное сечение (ФИГ. 8) со скошенными боковыми кромками, размещенными в канавке 116 для направляющей и взаимодействующим с канавкой 116 основания 110 кулачкового держателя, при этом канавка имеет форму, дополняющую форму направляющей 102 позиционирования, с боковыми губками, взаимодействующими со скошенными боковыми кромками так, что узел 108 кулачкового держателя может скользить вдоль направляющей 102 позиционирования, но без подъема с направляющей 102 позиционирования. Ряды зубцов 114 расположены на расстоянии друг от друга в поперечном направлении для размещения крепежных элементов 118, крепящих кулачковый держатель 112 к основанию 110 кулачкового держателя с возможностью прохода в канавку 116 для направляющей. Узел 108 кулачкового держателя выполнен с возможностью скольжения по направляющей 102 позиционирования в продольном направлении, а основание 110 кулачкового держателя также включает в себя механизм фиксации узла кулачкового держателя, который по выбору может входить во взаимодействие с направляющей 102 позиционирования и выходить из взаимодействия с ней для фиксации или расфиксации узла 108 кулачкового держателя на месте так, как описано более подробно ниже. Фиксацией и расфиксацией механизма фиксации узла кулачкового держателя управляют рычагом 120 раскрепления основания кулачкового держателя, показанным в фиксированном положении на ФИГ. 7 и 8.
[0031] Передний узел 104 соединения крыла также включает в себя узел 130 нервюрного элемента придания поперечной устойчивости центральному крылу, который соединен с опорной конструкцией центрального крыла 26, такой как передний шпангоут 60 для центрального крыла, раскрытый выше, и выборочно взаимодействует с узлом 108 кулачкового держателя для позиционирования фюзеляжа 12 относительно узла 24 крыла вдоль продольной оси 20. Узел 130 нервюрного элемента придания поперечной устойчивости центральному крылу, как показано на чертежах, включает в себя нервюрный элемент 132 придания поперечной устойчивости центральному крылу, который соединен с передним шпангоутом 60 центрального крыла или другой опорной конструкцией центрального крыла 26. Нервюрный элемент 132 придания поперечной устойчивости центральному крылу выполнен с возможностью взаимодействия с кулачковым держателем 112 и фиксации на нем, как более подробно описано ниже. Левый стержень 134 придания поперечной устойчивости и правый стержень 136 придания поперечной устойчивости соединены с возможностью поворота с нервюрным элементом 132 придания поперечной устойчивости центральному крылу соответствующими штифтами 138, 140, задающими оси вращения стержней 134, 136 придания поперечной устойчивости. Поворот стержней 134, 136 придания поперечной устойчивости по направлению к нервюрному элементу 132 придания поперечной устойчивости центральному крылу крыла может регулироваться ограничительными болтами 142, 144 стержней придания поперечной устойчивости, соответственно, размещаемыми в резьбовых отверстиях (не показано) нервюрного элемента 132 придания поперечной устойчивости центральному крылу и проходящими наружу за нижнюю поверхность нервюрного элемента 132 придания поперечной устойчивости центральному крылу.
[0032] На концах стержней 134, 136 придания поперечной устойчивости, противоположных штифтам 138, 140, левая накладка 146 придания поперечной устойчивости и правая накладка 148 придания поперечной устойчивости (ФИГ. 8) соединены с возможностью поворота со стержнями 134, 136 придания поперечной устойчивости штифтами 150, 152. Накладки 146, 148 придания поперечной устойчивости имеют вогнутые поверхности, обращенные к фюзеляжу 12, взаимодействующие с ним и имеющие формы, которые дополняют внешнюю поверхность фюзеляжа 12. Штифты 150, 152 задают оси вращения накладок 146, 148 придания поперечной устойчивости, которые параллельны осям вращения стержней 134, 136 придания поперечной устойчивости, задаваемым штифтами 138, 140. Штифты 150, 152 могут иметь пружины 154, 156 кручения, соответственно, обернутые вокруг них. Пружины 154, 156 кручения взаимодействуют с накладками 146, 148 придания поперечной устойчивости таким образом, что происходит смещение накладок 146, 148 придания поперечной устойчивости друг от друга для приема фюзеляжа 12, с тем чтобы упростить сборку фюзеляжа 12 и узла 24 крыла. При такой компоновке накладки 146, 148 придания поперечной устойчивости взаимодействуют с наружной поверхностью фюзеляжа 12, так что нервюрный элемент 132 придания поперечной устойчивости центральному крылу оказывается расположен над направляющей 102 позиционирования. Ограничительные болты 142, 144 стержней придания поперечной устойчивости могут быть отрегулированы для установки нервюрного элемента 132 придания поперечной устойчивости центральному крылу на необходимой высоте над направляющей 102 позиционирования. При таких конфигурациях продольное положение узла 24 крыла может быть отрегулировано посредством скользящего перемещения накладок 146, 148 придания поперечной устойчивости по наружной поверхности фюзеляжа 12 до тех пор, пока узел 24 крыла не окажется в необходимом положении.
[0033] Узел 108 кулачкового держателя и узел 130 нервюрного элемента придания поперечной устойчивости центральному крылу выполнены с возможностью фиксации относительно друг друга для фиксации фюзеляжа 12 в определенном положении относительно узла 24 крыла и расфиксации и возможностью разделения во время переустановки фюзеляжа 12. Фиксацией и расфиксацией узлов 108, 130 управляют с внешней стороны кулачкового держателя 112 с помощью кулачкового фиксатора 160 и соответствующего рычага 162 защелки кулачкового фиксатора в показанном варианте реализации. Кулачковый фиксатор 160 имеет шестигранную головку 164 кулачкового фиксатора, проходящую наружу от кулачкового держателя 112. Конфигурация шестигранной головки 164 кулачкового фиксатора обеспечивает возможность взаимодействия с инструментом (не показано), выполненным с возможностью приложения крутящего момента для поворота кулачкового фиксатора 160 между фиксированным и расфиксированным положениями. Шестигранная головка 164 кулачкового фиксатора имеет шестиугольную форму, так что обеспечена возможность наложения гаечного ключа, регулируемого гаечного ключа, торцевого гаечного ключа или т.п.и приложения крутящего момента. Шестигранная головка 164 кулачкового фиксатора может иметь любую другую подходящую конфигурацию, позволяющую осуществлять взаимодействие соответствующим инструментом и поворот между фиксированным и расфиксированным положениями.
[0034] На ФИГ. 9 приведен вид в разрезе узла 108 кулачкового держателя, узла 130 нервюрного элемента придания поперечной устойчивости центральному крылу и соответствующих частей фюзеляжа 12 и направляющей 102 позиционирования. На этом чертеже узел 108 кулачкового держателя взаимодействует и зафиксирован на узле 130 нервюрного элемента придания поперечной устойчивости центральному крылу. Рычаг 120 раскрепления основания кулачкового держателя находится в своем зафиксированном положении, так что узел 108 кулачкового держателя не может скользить вдоль направляющей 102 позиционирования. Рычаг 120 раскрепления основания кулачкового держателя функционально соединен с планкой 170 фиксации основания, которая расположена с возможностью скольжения внутри щелевого отверстия 172 планки фиксации основания 110 кулачкового держателя. Когда рычаг 120 раскрепления основания кулачкового держателя перемещается в свое зафиксированное положение, планка 170 фиксации основания скользит вниз и расположена между соседними зубьями 114 направляющей 102 позиционирования для закрепления узла 108 кулачкового держателя в положении, показанном на ФИГ. 9. Как дополнительно показано на ФИГ. 9, направляющая 102 позиционирования прикреплена к фюзеляжу 12 множеством крепежных элементов 174, и к внутренней поверхности фюзеляжа 12 может быть прикреплена опорная пластина 176 направляющей для обеспечения дополнительной конструктивной опоры для фюзеляжа 12.
[0035] Механизм фиксации основания 110 кулачкового держателя приведен в качестве примера, и авторами изобретения рассматривается возможность использования альтернативного фиксирующего механизма. Например, в патенте США №8,567,105, выданном Bobro 29 октября 2013 года, раскрыто устройство для установки с сопряжением, выполненное с возможностью прикрепления к направляющей, такой как направляющая 102 позиционирования фюзеляжа, показанной и описанной в настоящем документе. Когда основание 110 кулачкового держателя выполнено в виде устройства для установки с сопряжением согласно патенту Bobro, одна из губок 122 (ФИГ. 8), взаимодействующая с направляющей 102 позиционирования, закреплена относительно основания 110 кулачкового держателя, а другая губка 124 (ФИГ. 8) является подвижной зажимной губкой 124, которая функционально соединена с рычагом 120 раскрепления основания кулачкового держателя. Когда рычаг 120 раскрепления основания кулачкового держателя находится в фиксированном положении, подвижные зажимные губки 124 зафиксированы на месте и взаимодействуют с направляющей 102 позиционирования для удержания узла 108 кулачкового держателя на направляющей 102 позиционирования. Когда рычаг 120 раскрепления основания кулачкового держателя находится в расфиксированном положении, подвижные зажимные губки 124 могут быть свободно отведены в основание 110 кулачкового держателя для раскрепления направляющей 102 позиционирования, так что узел 108 кулачкового держателя может быть повернут со снятием с направляющей 102 позиционирования. В этом варианте реализации планка 170 фиксации основания постоянно закреплена в нижнем положении по ФИГ. 9 и вставлена между соседними зубьями 114, когда закрепленная губка 122 взаимодействует с направляющей 102 позиционирования, и узел 108 кулачкового держателя повернут для введения направляющей 102 позиционирования во взаимодействие с подвижными зажимными губками 124 с удержанием узла 108 кулачкового держателя, закрепленного вдоль направляющей 102 позиционирования и продольной оси 20. Предусмотрены дополнительные варианты основания кулачкового держателя.
[0036] Кулачковый фиксатор 160 включает в себя цилиндрическое тело 180 кулачкового фиксатора, проходящее от шестигранной головки 164 кулачкового фиксатора (не показано) и расположенное с возможностью поворота внутри сквозного отверстия 182 кулачкового держателя 112. Цилиндрическое тело 180 кулачкового фиксатора имеет сквозное отверстие 184, проходящее через тело кулачкового фиксатора, которое смещено относительно продольного центра цилиндрического тела 180 кулачкового фиксатора, так что положение сквозного отверстия 184, проходящего через тело кулачкового фиксатора, вдоль продольной оси 20 фюзеляжа 12, будет варьироваться по мере вращения цилиндрического тела 180 кулачкового фиксатора в сквозном отверстии 182 кулачкового держателя. Между барабанной шайбой 188 кулачкового фиксатора и головной шайбой 190 кулачкового фиксатора проходит рычаг 186 кулачкового фиксатора. Рычаг 186 кулачкового фиксатора имеет головку на одном конце, резьбовую часть на противоположном конце и стержневую часть между ними. Барабанная шайба 188 кулачкового фиксатора имеет сквозное отверстие 192 барабанной шайбы, через которое проходят резьбовая и стержневая части рычага 186 кулачкового фиксатора и которая взаимодействует с головой рычага 186 кулачкового фиксатора. Головная шайба 190 кулачкового фиксатора имеет сквозное отверстие 194 с внутренней резьбой головной шайбы, которая принимает резьбовую часть рычага 186 кулачкового фиксатора. Шайбы 188, 190 также могут иметь отверстия для установочных винтов (не показано), которые могут быть затянуты для взаимодействия с рычагом 186 кулачкового фиксатора и фиксации рычага 186 кулачкового фиксатора в определенном положении в сквозных отверстиях 192, 194 для поддержания необходимого разделения между шайбами 188, 190. Для регулировки расстояния между шайбами 188, 190 и натяжения, которое существует в рычаге 186 кулачкового фиксатора, когда узлы 108, 130 зафиксированы относительно друг друга, установочные винты могут быть ослаблены и может быть вставлен инструмент, такой как отвертка или торцевой ключ через отверстие 195 в кулачковом держателе 112 для поворота рычага 186 кулачкового фиксатора в соответствующем направлении для резьбы с перемещением головной шайбы 190 кулачкового фиксатора в направлении барабанной шайбы 188 кулачкового фиксатора или от нее.
[0037] Барабанная шайба 188 кулачкового фиксатора расположена с возможностью поворота внутри сквозного отверстия 184, проходящего через тело кулачкового фиксатора. Однако конфигурация цилиндрического тела 180 кулачкового фиксатора будет определять величину поворота барабанной шайбы 188 кулачкового фиксатора и, соответственно, рычага 186 кулачкового фиксатора и головной шайбы 190 кулачкового фиксатора. Резьбовая и стержневая части рычага 186 кулачкового фиксатора проходят через щелевое отверстие 196 рычага кулачкового фиксатора, проходящее по окружности вокруг цилиндрического тела 180 кулачкового фиксатора на более чем 180° от поверхности 198 фиксации к поверхности 200 расфиксации. Как показано на чертежах, поверхность 198 фиксации расположена над рычагом 186 кулачкового фиксатора, когда узел 108 кулачкового держателя зафиксирован. В этом положении поверхность 198 фиксации предотвращает поворот рычага 186 кулачкового фиксатора и барабанной шайбы 188 кулачкового фиксатора в направлении против часовой стрелки, как показано на чертежах. В то же время рычаг 186 кулачкового фиксатора предотвращает дальнейший поворот кулачкового фиксатора 160 в направлении по часовой стрелке и потерю зажатия между узлом 108 кулачкового держателя и нервюрным элементом 132 придания поперечной устойчивости центральному крылу вследствие смещения сквозного отверстия 184, проходящего через тело кулачкового фиксатора, и перемещение барабанной шайбы 188 кулачкового фиксатора назад в направлении нервюрного элемента 132 придания поперечной устойчивости центральному крылу. Кулачковый фиксатор 160 удерживается в фиксированном положении рычагом 162 защелки кулачкового фиксатора, который поворачивают по часовой стрелке, как показано, пружиной 202 рычага защелки кулачкового фиксатора, так что кончик 204 рычага защелки кулачкового фиксатора оказывается расположен в фиксирующей выемке 206 в наружной поверхности цилиндрического тела 180 кулачкового фиксатора. Рычаг 162 защелки кулачкового фиксатора может быть установлен с возможностью вращения на кулачковом держателе 112 с помощью пружинного штифта 208 или другого соответствующего поворотного механизма.
[0038] Нервюрный элемент 132 придания поперечной устойчивости центральному крылу выполнен с возможностью приема рычага 186 кулачкового фиксатора и головной шайбы 190 кулачкового фиксатора для прикрепления узла 130 нервюрного элемента придания поперечной устойчивости центральному крылу к узлу 108 кулачкового держателя. Нервюрный элемент 132 придания поперечной устойчивости центральному крылу имеет приемное щелевое отверстие 210 для кулачкового фиксатора, имеющее приемную часть 212 головной шайбы, имеющую ширину, которая больше ширины головной шайбы 190 кулачкового фиксатора, и приемную часть 214 кулачкового рычага, имеющую ширину, которая меньше ширины головной шайбы 190 кулачкового фиксатора, но больше внешнего диаметра резьбовой части рычага 186 кулачкового фиксатора. Переход между приемной частью 212 головной шайбы и приемной частью 214 кулачкового рычага задает поверхность 216 взаимодействия с головной шайбой, взаимодействующую с головной шайбой 190 кулачкового фиксатора для предотвращения протягивания головной шайбы 190 кулачкового фиксатора через приемную часть 214 кулачкового рычага.
[0039] В фиксированном положении, как показано на ФИГ. 9, взаимодействие между узлом 108 кулачкового держателя и направляющей 102 позиционирования, и между узлом 108 кулачкового держателя и узлом 130 нервюрного элемента придания поперечной устойчивости центральному крылу, будет фиксировать нервюрный элемент 132 придания поперечной устойчивости центральному крылу и, соответственно, фюзеляж 12 и узел 24 крыла в фиксированном положении вдоль продольной оси 20. Во время полета силы, воздействующие на фюзеляж 12 и узел 24 крыла, как правило, могут вызывать перемещение кулачкового держателя 112 и нервюрного элемента 132 придания поперечной устойчивости центральному крылу в противоположных направлениях относительно друг друга перпендикулярно продольной оси 20. В этой ситуации сдвиговые напряжения, возникающие на рычаге 186 кулачкового фиксатора и пересекающие место сопряжения между кулачковым держателем 112 и нервюрным элементом 132 придания поперечной устойчивости центральному крылу, предотвращаются путем обеспечения переднего работающего на сдвиг штифта 218, проходящего назад от кулачкового держателя 112 и размещаемого во втулке 220 внутри отверстия 222 для работающего на сдвиг штифта нервюрного элемента 132 придания поперечной устойчивости центральному крылу. Когда указанные силы приложены к кулачковому держателю 112 и нервюрному элементу 132 придания поперечной устойчивости центральному крылу, по существу все эти силы и соответствующие сдвиговые напряжения выдерживаются передним работающим на сдвиг штифтом 218.
[0040] На ФИГ. 10 показан узел 108 кулачкового держателя, расфиксированный и отделенный от узла 130 нервюрного элемента придания поперечной устойчивости центральному крылу, который опущен для ясности. Узел 108 кулачкового держателя расфиксируется поворотом рычага 162 защелки кулачкового фиксатора против часовой стрелки, как показано на чертежах, вокруг подпружиненного штифта 208, так что кончик 204 рычага защелки кулачкового фиксатора выходит из взаимодействия с фиксирующей выемкой 206. Во взаимодействие с кулачковым фиксатором 160 был введен подходящий инструмент, которым фиксатор 160 поворачивают против часовой стрелки приблизительно на 250° из положения, показанного на ФИГ. 9. Когда кулачковый фиксатор 160 прошел поворот на 180°, барабанная шайба 188 кулачкового фиксатора была в крайнем заднем положении, что обеспечивало зазор для головной шайбы 190 кулачкового фиксатора от поверхности 216 взаимодействия с головной шайбой. По мере продолжения кулачковым фиксатором 160 поворота против часовой стрелки в показанное расфиксированное положение, поверхность 200 расфиксации взаимодействует с рычагом 186 кулачкового фиксатора и головной шайбой 190 кулачкового фиксатора и поднимает рычаг 186 и головную шайбу 190 с выводом из приемного щелевого отверстия 210 для кулачкового фиксатора в отведенное положение. Кулачковый держатель 112 также включает в себя подпружиненный плунжер 224, проходящий внутрь от боковой стенки 226 кулачкового держателя с образованием упора, взаимодействующего с рычагом 186 кулачкового фиксатора для удержания рычага 186 кулачкового фиксатора в расфиксированном и отведенном положении.
[0041] На ФИГ. 10 также показан узел 108 кулачкового держателя расфиксированный с откреплением от направляющей 102 позиционирования. Рычаг 120 раскрепления основания кулачкового держателя перемещен в расфиксированное положение, которое не видно на ФИГ. 10. Перемещение рычага 120 раскрепления основания кулачкового держателя вызывает скольжение планки 170 фиксации основания вверх в щелевое отверстие 172 планки фиксации и с выходом из взаимодействия с зубьями 114 направляющей 102 позиционирования. С использованием основания, описанного в упомянутом выше патенте Bobro, рычаг 120 раскрепления основания кулачкового держателя раскрепляет подвижные зажимные губки 124, так что узел 108 кулачкового держателя может быть повернут с выходом из направляющей 102 позиционирования. Специалистам в данной области техники будет очевидно, что узел 108 кулачкового держателя может быть перемещен в любое из множества отдельных положений, в которых планка 170 фиксации основания выровнена между соседними зубьями 114. Например, на ФИГ. 11 узел 108 кулачкового держателя кронштейна был перемещен вперед вдоль направляющей 102 позиционирования в положение, находящееся там, где планка 170 фиксации основания выровнена между двумя соседними зубьями 114. С узлом 108 кулачкового держателя в определенном положении, рычаг 120 раскрепления основания кулачкового держателя перемещается назад в фиксированное положение и вызывает скольжение планки 170 фиксации основания вниз между соседними зубьями 114 или с фиксацией подвижных зажимных губок. С узлом 108 кулачкового держателя, зафиксированном на месте, узел 130 нервюрного элемента придания поперечной устойчивости центральному крылу скользит вместе с узлом 24 крыла вдоль фюзеляжа 12 к узлу 108 кулачкового держателя, или наоборот.
[0042] На ФИГ. 12 узел 108 кулачкового держателя находится в первом состоянии фиксации на узле 130 нервюрного элемента придания поперечной устойчивости центральному крылу. Рычаг 186 кулачкового фиксатора проталкивается за плунжер 224 и поворачивается по часовой стрелке в приемное щелевое отверстие 210 для кулачкового фиксатора нервюрного элемента 132 придания поперечной устойчивости центральному крылу. Когда рычаг 186 кулачкового фиксатора вращается, с головной шайбой 190 кулачкового фиксатора взаимодействует поверхность 216 взаимодействия с головной шайбой. Поверхность 216 взаимодействия с головной шайбой имеет начальную выпуклую часть 230, которая направляет головную шайбу 190 кулачкового фиксатора к вогнутой части 232. Вогнутая часть 232 будет взаимодействовать с головной шайбой 190 кулачкового фиксатора и удерживать головную шайбу 190 кулачкового фиксатора, когда затянут кулачковый фиксатор 160.
[0043] На ФИГ. 13 показан узел 108 кулачкового держателя в промежуточном состоянии фиксации, в котором кулачковый фиксатор 160 повернут приблизительно на 90° по часовой стрелке. Вследствие смещения сквозного отверстия 184, проходящего через тело кулачкового фиксатора, рычаг 186 кулачкового фиксатора и шайбы 188, 190 перемещается в продольном направлении вперед, и головная шайба 190 кулачкового фиксатора взаимодействует с вогнутой частью 232 поверхности 216 взаимодействия с головной шайбой с подтягиванием узла 130 нервюрного элемента придания поперечной устойчивости центральному крылу к узлу 108 кулачкового держателя. В завершении, как показано на ФИГ. 9, кулачковый фиксатор 160 оказывается повернут в полностью зафиксированное положение. Рычаг 186 кулачкового фиксатора и шайбы 188, 190 находятся в максимально переднем положении, и поверхность 198 фиксации предотвращает поворот рычага 186 кулачкового фиксатора в направлении против часовой стрелки. По мере поворота кулачкового фиксатора 160 в фиксированное положение передняя кромка фиксирующей выемки 206 поворачивается за кончик 204 рычага защелки кулачкового фиксатора, и пружина 202 рычага защелки кулачкового фиксатора поворачивает рычаг 162 защелки кулачкового фиксатора по часовой стрелке и кончик 204 рычага защелки кулачкового фиксатора в фиксирующую выемку 206 с предотвращением поворота кулачкового фиксатора 160 назад в направлении против часовой стрелки в направлении расфиксированного положения.
[0044] Возвращаясь к ФИГ. 7, задний узел 106 соединения крыла работает совместно с передним узлом 104 соединения крыла с фиксацией узла 24 крыла в необходимом положении. Задний узел 106 соединения крыла включает в себя задний узел 240 держателя работающих на сдвиг штифтов и блок 242 работающих на сдвиг штифтов для крыла. Задний узел 240 держателя работающих на сдвиг штифтов включает в себя держатель 244 работающих на сдвиг штифтов, установленный на основании 246 держателя работающих на сдвиг штифтов. Основание 246 держателя работающих на сдвиг штифтов может иметь конфигурацию, схожую с основанием 110 кулачкового держателя с канавкой 248 для направляющей, принимающей направляющую 102 позиционирования, и рычагом 250 раскрепления основания работающих на сдвиг штифтов, выполненным с возможностью перемещения между зафиксированным и расфиксированным положениями. Как показано на виде в разрезе по ФИГ. 14, держатель 244 работающих на сдвиг штифтов прикреплен к основанию 246 держателя работающих на сдвиг штифтов крепежными элементами 118. Планка 252 фиксации основания выполнена с возможностью скольжения внутри щелевого отверстия 254 планки фиксации для перемещения между фиксированным положением, расположенным между соседними зубьями 114, как показано на чертежах, и расфиксированным положением с отведением внутрь щелевого отверстия 254 планки фиксации, когда рычаг 250 раскрепления основания работающих на сдвиг штифтов перемещен в свое расфиксированное положение. С использованием основания, описанного в патенте Bobro, планка 252 фиксации основания попеременно фиксирует и расфиксирует подвижные зажимные губки 122. Задний работающий на сдвиг штифт 256 проходит назад от держателя 244 работающих на сдвиг штифтов и принимается втулкой 258 в отверстии 260 для работающего на сдвиг штифта блока 242 работающих на сдвиг штифтов для крыла.
[0045] Блок 242 работающих на сдвиг штифтов для крыла установлен на конструктивном компоненте узла 24 крыла, таком как задний шпангоут 66 для центрального крыла. Следовательно, блок 242 работающих на сдвиг штифтов для крыла остается на фиксированном расстоянии от нервюрного элемента 132 придания поперечной устойчивости центральному крылу. Когда регулируют продольное положение фюзеляжа 12 и выполняют переустановку узла 108 кулачкового держателя вдоль направляющей 102 позиционирования с повторной фиксацией, задний узел 240 держателя работающих на сдвиг штифтов перемещают на то же самое расстояние вдоль направляющей 102 позиционирования с повторной фиксацией в определенном положении для обеспечения возможности приема заднего работающего на сдвиг штифта 256 блоком 242 работающих на сдвиг штифтов для крыла. Подобно кулачковому держателю 112 и нервюрному элементу 132 придания поперечной устойчивости центральному крылу, силы, воздействующие на фюзеляж 12 и узел 24 крыла, как правило, могут вызывать перемещение держателя 244 работающих на сдвиг штифтов и блока 242 работающих на сдвиг штифтов для крыла в противоположных направлениях относительно друг друга перпендикулярно продольной оси 20. Когда указанные силы приложены к держателю 244 работающих на сдвиг штифтов и блоку 242 работающих на сдвиг штифтов для крыла, по существу все эти силы и соответствующие сдвиговые напряжения выдерживаются задним работающим на сдвиг штифтом 256. Между держателем 244 работающих на сдвиг штифтов и блоком 242 работающих на сдвиг штифтов для крыла поддерживается зазор, чтобы гарантировать передачу продольных нагрузок через место сопряжения узла 108 кулачкового держателя/узла 130 нервюрного элемента придания поперечной устойчивости центральному крылу.
[0046] На ФИГ. 15 показан еще один альтернативный вариант реализации механизма 270 позиционирования фюзеляжа, в котором регулировка продольного положения фюзеляжа 12 автоматизирована и может обеспечивать регулировку положения фюзеляжа 12, когда летательный аппарат 10 находится в воздухе. В механизме 270 позиционирования фюзеляжа направляющая 102 позиционирования заменена винтовым валом 272, имеющим внешнюю спиральную резьбу 274 и устанавливаемым на фюзеляже 12 с помощью переднего винтового держателя 276, имеющего передний подшипник 278 вала, и заднего винтового держателя 280, имеющего задний подшипник 282 вала. Механизм 270 позиционирования фюзеляжа также включает в себя устройство 284 приведения в действие вала, установленное на фюзеляже 12 и функционально соединенное с винтовым валом 272. Устройство 284 приведения в действие вала выполнено с возможностью приведения в действие для вращения винтового вала 272 в любом направлении вокруг оси вращения винтового вала, которая параллельна продольной оси, с тем чтобы вызывать перемещение механизма 270 позиционирования фюзеляжа 12 параллельно продольной оси 20 в любом направлении. Устройство 284 приведения в действие вала может быть любым подходящим приводным механизмом, способным вращать винтовой вал 272 в первом направлении вращения винтового вала и втором направлении вращения винтового вала, таким как вращающийся привод, шаговый двигатель, сервомотор и тому подобное.
[0047] Механизм 270 позиционирования фюзеляжа также включает в себя узел 286 кулачкового держателя, который представляет собой модифицированный вариант узла 108 кулачкового держателя, и узел 130 нервюрного элемента придания поперечной устойчивости центральному крылу по существу, как описано выше. В этом варианте реализации аналогичные элементы, описанные выше, идентифицированы с использованием одинаковых ссылочных позиций. В узле 286 кулачкового держателя кулачковый держатель 112 установлен на основании 288 кулачкового держателя, который выполнен с возможностью приема винтового вала 272 и взаимодействия с ним. Основание 288 кулачкового держателя имеет винтовой канал 290, проходящий в продольном направлении через основание 288 кулачкового держателя. Узел 286 кулачкового держателя может включать в себя позиционирующие устройства (не показано), аналогичные стержням 134, 136 придания поперечной устойчивости и накладкам 146, 148 придания поперечной устойчивости узла 130 нервюрного элемента придания поперечной устойчивости центральному крылу, которые взаимодействуют с фюзеляжем 12 для удержания узла 286 кулачкового держателя в стоячем положении, показанном на ФИГ. 15. Винтовой канал 290 включает в себя внутреннюю спиральную резьбу 292, которая зацепляется с внешней спиральной резьбой 274 винтового вала 272. Хотя это не показано, держатель 244 работающих на сдвиг штифтов может быть установлен на основании держателя работающих на сдвиг штифтов, имеющего схожую конфигурацию для приема винтового вала 272 и взаимодействия с винтовым валом 272.
[0048] Вследствие зацепления спиральных резьб 274, 292, фюзеляж 12 будет перемещаться вперед, когда устройство 284 приведения в действие вала вращает винтовой вал 272 в первом направлении, и будет перемещаться назад, когда устройство 284 приведения в действие вала вращает винтовой вал 272 в противоположном направлении. Поскольку механизм 270 позиционирования фюзеляжа не требует ручного вмешательства для перемещения фюзеляжа 12, как это необходимо для механизмов 50, 100 позиционирования фюзеляжа, устройство 284 приведения в действие вала может приводиться в действие во время полета, чтобы при необходимости изменить положение фюзеляжа 12. Такое выполняемое в полете изменение положения может быть необходимо, если полезная нагрузка 46 смещается после взлета и перемещает центр 40 тяжести летательного аппарата 10, по мере сжигания топлива двигателем и перемещения центра 40 тяжести летательного аппарата 10 от топливного бака или при выдаче части или всей полезной нагрузки с фюзеляжа 12. Выполняемая в полете регулировка положения может повлиять на перемещение центра 40 тяжести в допустимый диапазон 44 относительно центра 42 подъемной силы.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0049] Механизмы 50, 100, 270 позиционирования фюзеляжа, показанные и описанные в настоящем документе, способствуют регулировке продольного положения фюзеляжа 12, выполняемой для балансировки центра 40 тяжести и центра 42 подъемной силы летательного аппарата 10, чтобы компенсировать изменения местоположения и величины центра 40 тяжести, вызываемые изменениями массы и местоположения полезных нагрузок 46, переносимых летательным аппаратом 10, топлива, хранимого в летательном аппарате 10, и другими факторами, связанными с нагрузкой. На ФИГ. 16 показана процедура 300 балансировки приведенного в качестве примера летательного аппарата, которая может быть использована для определения того, когда необходима регулировка продольного положения фюзеляжа 12 с переводом центра 40 тяжести в допустимый диапазон 44 центра 42 подъемной силы. В летательном аппарате 10, как раскрыто в настоящем документе, фюзеляж 12 вносит минимальный вклад в подъемную силу летательного аппарата 10, поэтому центр 42 подъемной силы сконцентрирован в фиксированном местоположении на узле 24 крыла. Допустимый диапазон 44 положений центра 40 тяжести также известен и может быть механически нанесен, записан или обозначен иным образом на узле 24 крыла.
[0050] Процедура 300 балансировки может быть начата в блоке 302, при реализации которого летательный аппарат 10 готовят к полету. Подготовка к полету может включать в себя загрузку полезной нагрузки 46 в фюзеляж 12 или удаление полезной нагрузки 46 из фюзеляжа 12 в зависимости от требований к предстоящему полету. Как раскрыто выше, вес и положение полезной нагрузки 46 влияют на положение центра 40 тяжести летательного аппарата 10. В некоторых случаях фюзеляж 12 и узел 24 крыла могут иметь модульные конструкции, так что с данным узлом 24 крыла могут быть использованы различные фюзеляжи 12, имеющие различные конфигурации и возможности. Например, различные фюзеляжи 12 могут иметь разные датчики и другое оборудование для обследования участка, над которым летательный аппарат 10 будет совершать полет, и сбора видео и других данных, относящихся к обследуемой области. В других вариантах осуществления фюзеляжи 12 могут иметь различные возможности для транспортировки и развертывания полезной нагрузки 46 во время полета, например, когда летательный аппарат 10 может транспортировать посылки и сбрасывать их в местах доставки вдоль маршрута полета. Во время подготовки летательного аппарата 10 фюзеляж 12 размещают относительно узла 24 крыла с использованием реализованного механизма позиционирования, такого как один из механизмов 50, 100, 270 позиционирования фюзеляжа, описанных выше. Там, где реализован механизм 100 позиционирования фюзеляжа, например, узел 108 кулачкового держателя и задний узел 240 держателя работающих на сдвиг штифтов размещены вдоль направляющей 102 позиционирования, и узел 108 кулачкового держателя зажат на узле 130 нервюрного элемента придания поперечной устойчивости центральному крылу с задним работающим на сдвиг штифтом 256, вставленным в отверстие 260 для работающего на сдвиг штифта.
[0051] После того, как летательный аппарат 10 готов к полету в блоке 302 управление процедурой 300 переходит к блоку 304, в котором определяют продольное положение центра 40 тяжести подготовленного летательного аппарата 10. Местоположение центра 40 тяжести может быть определено любыми подходящими средствами. Например, летательный аппарат 10 может включать в себя датчики (не показано) для определения распределения веса внутри летательного аппарата 10, и сигналы датчиков с измеренными нагрузками могут быть использованы автоматически контроллером или вручную техническим специалистом для вычисления положения центра 40 тяжести. Такая же обработка может быть использована, когда полезная нагрузка 46 загружена и когда фюзеляж 12 пуст. Подобные вычисления могут быть выполнены, если летательный аппарат 10 опирается на двое или более весов (не показано), обеспечивающих измерения веса, которые могут быть использованы для вычисления местоположения центра 40 тяжести. В других вариантах осуществления технические специалисты, готовящие летательный аппарат 10 к полету, могут знать приблизительное местоположение центра 40 тяжести, когда летательный аппарат пуст, исходя из предыдущих вычислений или опыта. При добавлении полезной нагрузки 46 технический специалист может использовать массу и местоположение полезной нагрузки 46 для определения отрегулированного положения центра 40 тяжести с учетом полезной нагрузки 46.
[0052] При еще одном альтернативном подходе точки балансировки механически нанесены на узел 24 крыла, которые представляют передние и задние пределы допустимого диапазона 44, как раскрыто выше. Приблизительное местоположение центра 40 тяжести может быть определено путем балансировки летательного аппарата 10 в точках балансировки на каждом конце допустимого диапазона 44. Когда центр 40 тяжести находится в допустимом диапазоне 44, летательный аппарат 10 будет наклоняться вперед при поддержке в задней точке балансировки и будет наклоняться назад при поддержке в передней точке балансировки. Центр 40 тяжести находится впереди допустимого диапазона 44, если летательный аппарат 10 наклоняется вперед в обеих точках балансировки, и находится позади допустимого диапазона 44, если летательный аппарат 10 наклоняется назад в обеих точках балансировки. Специалистам в данной области техники будут очевидны дальнейшие альтернативные стратегии определения местоположения центра 40 тяжести.
[0053] После определения продольного положения центра 40 тяжести в блоке 304 и с положениями центра 42 подъемной силы и допустимым диапазоном 44 известными, как раскрыто выше, можно определить потребность в регулировке положения фюзеляжа 12 для балансировки летательного аппарата 10. Управление может перейти к блоку 306 для определения, находится ли центр 40 тяжести в допустимом диапазоне 44. Если центр 40 тяжести находится в допустимом диапазоне 44, фюзеляж 12 не нужно перемещать для балансировки летательного аппарата 10. В этом случае управление может перейти к концу процедуры 300 балансировки, и процедура 300 балансировки может быть прекращена.
[0054] Если центр 40 тяжести не находится в допустимом диапазоне 44, фюзеляж 12 должен быть перемещен для балансировки летательного аппарата 10. Управление может перейти к блоку 308 для регулировки продольного положения фюзеляжа 12 для перемещения центра 40 тяжести между максимальными положениями фюзеляжа в допустимом диапазоне 44. Там, где реализован механизм 50 позиционирования фюзеляжа, передний узел 52 соединения крыла и задний узел 54 соединения крыла переустанавливают и выравнивают с другим набором отверстий 70, 72, соответственно. Для механизма 100 позиционирования фюзеляжа, основания 110, 246 расфиксируют, так что передний узел 104 соединения крыла и задний узел 240 держателя работающих на сдвиг штифтов могут быть перемещены вдоль направляющей 102 позиционирования, и основания 110, 246 снова фиксируют там, где центр 40 тяжести по оценке находится в допустимом диапазоне 44. В вариантах осуществления с механизмом 270 позиционирования фюзеляжа, устройство 284 приведения в действие вала приводят в действие для вращения винтового вала 272 и перемещения фюзеляжа 12 в новое положение. После перемещения фюзеляжа 12 и его фиксации в новом положении управление процедурой 300 балансировки может быть возвращено к блоку 304 для определения нового положения центра 40 тяжести летательного аппарата 10 и к блоку 306 для определения, находится ли новое положение центра 40 тяжести в допустимом диапазоне 44. Этот итеративный процесс и регулировки положения фюзеляжа 12 и, соответственно, центра 40 тяжести можно продолжать в блоке 308 до тех пор, пока центр 40 тяжести не окажется в допустимом диапазоне 44, после чего процедуру 300 балансировки прекращают до следующего изменения центра 40 тяжести летательного аппарата 10.
[0055] С использованием автоматизированных механизмов позиционирования, таких как механизм 270 позиционирования фюзеляжа, процедура 300 балансировки может выполняться непрерывно или с периодическими интервалами во время полета для непрерывного отслеживания положения центра 40 тяжести и регулировки положения фюзеляжа 12 по мере необходимости для сохранения балансировки летательного аппарата 10 на протяжении полета. Автоматизированные механизмы позиционирования также обеспечивают возможность планировать регулировку положения фюзеляжа 12 в предсказуемое время во время полетов, когда центр 40 тяжести сместился или сместится, а величина регулировки положения может быть определена. Например, использование топлива летательным аппаратом 10 может быть измерено или оценено во время полета, а влияние на центр 40 тяжести летательного аппарата 10 рассчитано на основании этих данных. Исходя из местоположения топливных баков, центр 40 тяжести может быть перемещен вперед или назад по мере использования топлива. Точка, в которой центр 40 тяжести приближается к концу допустимого диапазона 44, может быть рассчитана заранее, и бортовой контроллер может приводить в действие устройство 284 приведения в действие вала механизма 270 позиционирования фюзеляжа для перемещения центра 40 тяжести назад в направлении центра 42 подъемной силы. При выполнении других задач могут быть известны временные характеристики события, которое приведет к изменению полезной нагрузки 46, переносимой летательным аппаратом 10, и может быть запланирована соответствующая регулировка положения фюзеляжа 12, осуществляемая в это же время. Например, летательный аппарат 10 может транспортировать еще один БПЛА, который может быть развернут во время полета, что приводит к мгновенному изменению полезной нагрузки 46, переносимой летательным аппаратом 10. При выполнении задач по доставке упаковок пакеты могут сбрасываться с летательного аппарата 10 в запланированных местоположениях вдоль траектории полета, и регулировки положения фюзеляжа 12 могут быть предварительно спланированы так, чтобы соответствовать доставке упаковок и обеспечивать сохранение центра 40 тяжести в допустимом диапазоне 44. Подобное планирование регулировки положения в полете может быть выполнено для других прогнозируемых ситуаций, когда положение центра 40 тяжести может изменяться относительно центра 42 подъемной силы.
[0056] Могут возникать ситуации, при которых полезная нагрузка 46 перемещает центр 40 тяжести в положение, в котором для фюзеляжа 12 потребовалось бы перемещение за пределы одного из максимальных положений фюзеляжа с переводом центра 40 тяжести в допустимый диапазон 44 и балансировки летательного аппарата 10. Для того чтобы справится с этими ситуациями может быть изменена процедура 300 балансировки для перемещения фюзеляжа 12 в максимально переднее или заднее положение механизмов 50, 100, 270 позиционирования фюзеляжа, в зависимости от того, что переведет центр 40 тяжести ближе всего к допустимому диапазону 44. После перемещения фюзеляжа 12 балласт может быть загружен в фюзеляж 12 для окончания балансировки летательного аппарата 10 так же, как в ранее известных летательных аппаратах. Балласт может иметь массу и размещаться для перемещения центра 40 тяжести в допустимом диапазоне 44. Вес летательного аппарата 10 может быть увеличен балластом, но в большинстве ситуаций способность перемещения фюзеляжа 12 и центра 40 тяжести может привести к уменьшению балласта, необходимого для балансировки летательного аппарата 10 с получением меньшей величины, чем потребовалось бы для известных ранее летательных аппаратов, имеющих фюзеляжи, закрепленные относительно крыльев.
[0057] Несмотря на то, что в приведенном выше тексте отражено подробное описание множества различных вариантов реализации, следует понимать, что объем защиты определен пунктами формулы изобретения, приведенной в конце данного документа. Раздел "Осуществление изобретения" следует толковать исключительно в качестве примера, при этом оно не описывает каждый возможный вариант реализации, поскольку описание каждого возможного варианта реализации является нецелесообразным или даже невозможным. Многочисленные альтернативные варианты могут быть реализованы с использованием существующих технологических средств или технологических средств, созданных после даты подачи данного документа, при этом такие варианты реализации все еще находятся в пределах объема пунктов формулы изобретения, определяющих объем защиты.
Кроме того, настоящее раскрытие содержит варианты реализации согласно следующим пунктам:
Пункт 1. Летательный аппарат, содержащий: фюзеляж, имеющий продольную ось; узел крыла и
механизм позиционирования фюзеляжа, функционально соединяющий фюзеляж с узлом крыла, причем
механизм позиционирования фюзеляжа выполнен с возможностью перемещения фюзеляжа относительно узла крыла в продольном направлении параллельно продольной оси между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа.
Пункт 2. Летательный аппарат по пункту 1, в котором механизм позиционирования фюзеляжа содержит:
передний узел соединения крыла, соединенный с узлом крыла;
множество первых фюзеляжных отверстий, проходящих через фюзеляж и размещенных в первом ряду фюзеляжных отверстий параллельно продольной оси; и
первый крепежный элемент, проходящий через одно из указанного множества первых фюзеляжных отверстий и взаимодействующий с передним узлом соединения крыла для соединения узла крыла с фюзеляжем, причем
обеспечена возможность перемещения продольного положения фюзеляжа между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа посредством изменения указанного одного из множества первых фюзеляжных отверстий, через которое проходит первый крепежный элемент.
Пункт 3. Летательный аппарат по пункту 2, в котором механизм позиционирования фюзеляжа содержит:
задний узел соединения крыла, соединенный с узлом крыла;
множество вторых фюзеляжных отверстий, проходящих через фюзеляж и размещенных во втором ряду фюзеляжных отверстий параллельно продольной оси; и
второй крепежный элемент, проходящий через одно из указанного множества вторых фюзеляжных отверстий и взаимодействующий с задним узлом соединения крыла для соединения фюзеляжа с узлом крыла, причем
каждое из указанного множества вторых фюзеляжных отверстий имеет соответствующее одно из указанного множества первых фюзеляжных отверстий в продольном направлении на длину пространства отверстий.
Пункт 4. Летательный аппарат по пункту 1, в котором механизм позиционирования фюзеляжа содержит:
направляющую позиционирования фюзеляжа, установленную на фюзеляже параллельно продольной оси; и
передний узел соединения крыла, содержащий узел кулачкового держателя, установленный на направляющей позиционирования фюзеляжа и выполненный с возможностью перемещения между множеством отдельных положений в продольном направлении, причем
узел кулачкового держателя функционально соединен с узлом крыла, так что перемещение узла кулачкового держателя вдоль направляющей позиционирования фюзеляжа способствует перемещению фюзеляжа в продольном направлении между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа.
Пункт 5. Летательный аппарат по пункту 4, в котором узел кулачкового держателя содержит механизм фиксации узла кулачкового держателя, выполненный с возможностью поочередного взаимодействия с направляющей позиционирования фюзеляжа для удержания узла кулачкового держателя в продольном положении вдоль направляющей позиционирования фюзеляжа и возможностью вывода из взаимодействия с направляющей позиционирования фюзеляжа для обеспечения возможности перемещения узла кулачкового держателя между указанным множеством отдельных положений вдоль направляющей позиционирования фюзеляжа в продольном направлении.
Пункт 6. Летательный аппарат по пункту 4, в котором передний узел соединения крыла содержит узел нервюрного элемента придания поперечной устойчивости центральному крылу, функционально соединенный с узлом крыла, причем
узел кулачкового держателя содержит рычаг кулачкового фиксатора, выполненный с возможностью перемещения между фиксированным положением, в котором рычаг кулачкового фиксатора взаимодействует с узлом нервюрного элемента придания поперечной устойчивости центральному крылу с фиксацией узла кулачкового держателя с узлом нервюрного элемента придания поперечной устойчивости центральному крылу для совместного перемещения в продольном направлении, и расфиксированным положением, в котором рычаг кулачкового фиксатора выведен из взаимодействия с узлом нервюрного элемента придания поперечной устойчивости центральному крылу для обеспечения возможности независимого перемещения узла кулачкового держателя и узла нервюрного элемента придания поперечной устойчивости центральному крылу в продольном направлении.
Пункт 7. Летательный аппарат по пункту 6, в котором узел кулачкового держателя содержит головную шайбу кулачкового фиксатора, установленную на резьбовой части рычага кулачкового фиксатора, причем
узел нервюрного элемента придания поперечной устойчивости центральному крылу содержит приемное щелевое отверстие для кулачкового фиксатора, принимающее рычаг кулачкового фиксатора и головную шайбу кулачкового фиксатора, когда рычаг кулачкового фиксатора перемещается в фиксированное положение, и поверхность взаимодействия с головной шайбой, которая взаимодействует с головной шайбой кулачкового фиксатора для предотвращения протягивания головной шайбы кулачкового фиксатора через приемное щелевое отверстие для кулачкового фиксатора.
Пункт 8. Летательный аппарат по пункту 6, в котором механизм позиционирования фюзеляжа содержит задний узел соединения крыла, содержащий:
- задний узел держателя работающих на сдвиг штифтов, имеющий задний работающий на сдвиг штифт, проходящий от него назад, причем
задний узел держателя работающих на сдвиг штифтов установлен на направляющей позиционирования фюзеляжа и выполнен с возможностью перемещения на ней в продольном направлении; и
- блок работающих на сдвиг штифтов для крыла, функционально соединенный с узлом крыла позади узла нервюрного элемента придания поперечной устойчивости центральному крылу, так что блок работающих на сдвиг штифтов для крыла перемещается с узлом крыла в продольном направлении, причем
блок работающих на сдвиг штифтов для крыла содержит отверстие для работающего на сдвиг штифта, которое принимает задний работающий на сдвиг штифт и взаимодействует с ним, так что задний работающий на сдвиг штифт выдерживает сдвигающие нагрузки, создаваемые, когда силы, воздействующие на фюзеляж и узел крыла, вызывают перемещение заднего узла держателя работающих на сдвиг штифтов и блока работающих на сдвиг штифтов для крыла в противоположных направлениях перпендикулярно продольной оси.
Пункт 9. Летательный аппарат по пункту 1, в котором механизм позиционирования фюзеляжа содержит:
винтовой вал с внешней спиральной резьбой, установленный на фюзеляже параллельно продольной оси и выполненный с возможностью вращения вокруг оси вращения винтового вала;
двигатель винта, установленный на фюзеляже, соединенный с винтовым валом и выполненный с возможностью приведения в действие для вращения винтового вала в первом направлении вращения винтового вала и втором направлении вращения винтового вала, которое противоположно первому направлению вращения винтового вала; и
узел кулачкового держателя, имеющий винтовой канал с внутренней спиральной резьбой, принимающий винтовой вал, причем
внутренняя спиральная резьба винтового канала, зацеплена с внешней спиральной резьбой винтового вала, так что фюзеляж перемещается вперед параллельно продольной оси, когда винтовой вал вращается в первом направлении вращения винтового вала, и фюзеляж перемещается назад параллельно продольной оси, когда винтовой вал вращается во втором направлении вращения винтового вала, и
узел кулачкового держателя функционально соединен с узлом крыла, так что перемещение фюзеляжа вследствие вращения винтового вала способствует перемещению фюзеляжа между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа.
Пункт 10. Летательный аппарат по пункту 9, в котором механизм позиционирования фюзеляжа содержит узел нервюрного элемента придания поперечной устойчивости центральному крылу, функционально соединенный с узлом крыла, причем
узел кулачкового держателя содержит рычаг кулачкового фиксатора, выполненный с возможностью перемещения между фиксированным положением, в котором рычаг кулачкового фиксатора взаимодействует с узлом нервюрного элемента придания поперечной устойчивости центральному крылу с фиксацией узла кулачкового держателя с узлом нервюрного элемента придания поперечной устойчивости центральному крылу для совместного перемещения в продольном направлении, и расфиксированным положением, в котором рычаг кулачкового фиксатора выведен из взаимодействия с узлом нервюрного элемента придания поперечной устойчивости центральному крылу для обеспечения возможности независимого перемещения узла кулачкового держателя и узла нервюрного элемента придания поперечной устойчивости центральному крылу в продольном направлении.
Пункт 11. Способ балансировки летательного аппарата, имеющего фюзеляж и узел крыла, установленный на нем, для перемещения фюзеляжа относительно узла крыла в продольном направлении, которое параллельно продольной оси фюзеляжа, между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа, включающий:
подготовку летательного аппарата к полету;
определение положения центра тяжести летательного аппарата вдоль продольной оси;
определение, находится ли центр тяжести в допустимом диапазоне продольных расстояний от центра подъемной силы летательного аппарата; и
регулировку продольного положения фюзеляжа с переводом центра тяжести в допустимый диапазон продольных расстояний от центра подъемной силы при определении того, что центр тяжести не находится в допустимом диапазоне продольных расстояний от центра подъемной силы.
Пункт 12. Способ по пункту 11, согласно которому летательный аппарат включает в себя передний узел соединения крыла, функционально соединяющий фюзеляж с узлом крыла, причем регулировка продольного положения фюзеляжа включает:
открепление переднего узла соединения крыла от фюзеляжа;
переустановку переднего узла соединения крыла и фюзеляжа с переводом центра тяжести в допустимый диапазон продольных расстояний от центра подъемной силы и повторное прикрепление переднего узла соединения крыла к фюзеляжу.
Пункт 13. Способ по пункту 11, согласно которому летательный аппарат включает в себя направляющую позиционирования фюзеляжа, установленную на фюзеляже параллельно продольной оси, и передний узел соединения крыла, содержащий узел кулачкового держателя, установленный на направляющей позиционирования фюзеляжа и выполненный с возможностью перемещения между множеством отдельных положений в продольном направлении, и имеющий механизм фиксации узла кулачкового держателя, выполненный с возможностью поочередного взаимодействия с направляющей позиционирования фюзеляжа для удержания узла кулачкового держателя в продольном положении и возможностью вывода из взаимодействия с направляющей позиционирования фюзеляжа для обеспечения возможности перемещения узла кулачкового держателя между указанным множеством отдельных положений вдоль направляющей позиционирования фюзеляжа в продольном направлении, при этом
узел кулачкового держателя функционально соединен с узлом крыла, так что перемещение узла кулачкового держателя вдоль направляющей позиционирования фюзеляжа способствует перемещению фюзеляжа в продольном направлении между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа, причем регулировка продольного положения фюзеляжа включает:
расфиксацию механизма фиксации узла кулачкового держателя с откреплением от направляющей позиционирования фюзеляжа;
перемещение фюзеляжа относительно узла кулачкового держателя и узла крыла с переводом центра тяжести в допустимый диапазон продольных расстояний от центра подъемной силы и
фиксацию механизма фиксации узла кулачкового держателя на направляющей позиционирования фюзеляжа.
Пункт 14. Способ по пункту 13, согласно которому узел кулачкового держателя прикреплен с возможностью снятия к узлу крыла, причем регулировка продольного положения фюзеляжа включает:
открепление узла кулачкового держателя от узла крыла перед расфиксацией механизма фиксации узла кулачкового держателя с откреплением от направляющей позиционирования фюзеляжа;
перемещение узла кулачкового держателя вдоль направляющей позиционирования фюзеляжа после открепления узла кулачкового держателя от узла крыла и в положение балансировки с переводом центра тяжести в допустимый диапазон продольных расстояний от центра подъемной силы;
фиксацию механизма фиксации узла кулачкового держателя на направляющей позиционирования фюзеляжа;
скользящее перемещение узла крыла вдоль фюзеляжа в положение балансировки узла кулачкового держателя и
прикрепление узла кулачкового держателя к узлу крыла с удерживанием фюзеляжа в определенном положении относительно узла крыла.
Пункт 15. Способ по пункту 11, согласно которому летательный аппарат включает в себя винтовой вал с внешней спиральной резьбой, установленный на фюзеляже параллельно продольной оси и выполненный с возможностью вращения вокруг оси вращения винтового вала, двигатель винта, соединенный с винтовым валом и выполненный с возможностью приведения в действие для вращения винтового вала в первом направлении вращения винтового вала и втором направлении вращения винтового вала, которое противоположно первому направлению вращения винтового вала, и узел кулачкового держателя, имеющий винтовой канал с внутренней спиральной резьбой, принимающий винтовой вал, при этом
внутренняя спиральная резьба винтового канала, зацеплена с внешней спиральной резьбой винтового вала, так что фюзеляж перемещается вперед параллельно продольной оси, когда винтовой вал вращается в первом направлении вращения винтового вала, и фюзеляж перемещается назад параллельно продольной оси, когда винтовой вал вращается во втором направлении вращения винтового вала, и
узел кулачкового держателя функционально соединен с узлом крыла, так что перемещение фюзеляжа вследствие вращения винтового вала способствует перемещению фюзеляжа в продольном направлении между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа, причем
регулировка продольного положения фюзеляжа включает приведение в действие двигателя винта, с тем чтобы вызвать вращение винтового вала либо в первом направлении вращения винтового вала, либо во втором направлении вращения винтового вала для перемещения фюзеляжа с переводом центра тяжести в допустимый диапазон продольных расстояний от центра подъемной силы.
Пункт 16. Механизм позиционирования фюзеляжа для перемещения фюзеляжа летательного аппарата относительно узла крыла летательного аппарата в продольном направлении, которое параллельно продольной оси фюзеляжа, содержащий:
направляющую позиционирования фюзеляжа, установленную на фюзеляже параллельно продольной оси; и
узел кулачкового держателя, установленный на направляющей позиционирования фюзеляжа и выполненный с возможностью перемещения на ней между множеством отдельных положений в продольном направлении, причем
узел кулачкового держателя функционально соединен с узлом крыла, так что перемещение узла кулачкового держателя вдоль направляющей позиционирования фюзеляжа способствует перемещению фюзеляжа в продольном направлении между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа.
Пункт 17. Механизм позиционирования фюзеляжа по пункту 16, в котором узел кулачкового держателя содержит механизм фиксации узла кулачкового держателя, выполненный с возможностью поочередного взаимодействия с направляющей позиционирования фюзеляжа для удержания узла кулачкового держателя в продольном положении вдоль направляющей позиционирования фюзеляжа и возможностью вывода из взаимодействия с направляющей позиционирования фюзеляжа для обеспечения возможности перемещения узла кулачкового держателя между указанным множеством отдельных положений вдоль направляющей позиционирования фюзеляжа в продольном направлении.
Пункт 18. Механизм позиционирования фюзеляжа по пункту 16, содержащий узел нервюрного элемента придания поперечной устойчивости центральному крылу, функционально соединенный с узлом крыла, причем
узел кулачкового держателя содержит рычаг кулачкового фиксатора, выполненный с возможностью перемещения между фиксированным положением, в котором рычаг кулачкового фиксатора взаимодействует с узлом нервюрного элемента придания поперечной устойчивости центральному крылу с фиксацией узла кулачкового держателя с узлом нервюрного элемента придания поперечной устойчивости центральному крылу для совместного перемещения в продольном направлении, и расфиксированным положением, в котором рычаг кулачкового фиксатора выведен из взаимодействия с узлом нервюрного элемента придания поперечной устойчивости центральному крылу для обеспечения возможности независимого перемещения узла кулачкового держателя и узла нервюрного элемента придания поперечной устойчивости центральному крылу в продольном направлении.
Пункт 19. Механизм позиционирования фюзеляжа по пункту 18, в котором узел кулачкового держателя содержит головную шайбу кулачкового фиксатора, установленную на резьбовой части рычага кулачкового фиксатора, причем
узел нервюрного элемента придания поперечной устойчивости центральному крылу содержит приемное щелевое отверстие для кулачкового фиксатора, принимающее рычаг кулачкового фиксатора и головную шайбу кулачкового фиксатора, когда рычаг кулачкового фиксатора перемещается в фиксированное положение, и поверхность взаимодействия с головной шайбой, которая взаимодействует с головной шайбой кулачкового фиксатора для предотвращения протягивания головной шайбы кулачкового фиксатора через приемное щелевое отверстие для кулачкового фиксатора.
Пункт 20. Механизм позиционирования фюзеляжа по пункту 16, причем механизм позиционирования фюзеляжа содержит задний узел соединения крыла, содержащий:
- задний узел держателя работающих на сдвиг штифтов, имеющий задний работающий на сдвиг штифт, проходящий от него назад, причем
- задний узел держателя работающих на сдвиг штифтов установлен на направляющей позиционирования фюзеляжа и выполнен с возможностью перемещения на ней в продольном направлении;и
- блок работающих на сдвиг штифтов для крыла, функционально соединенный с узлом крыла позади переднего узла соединения крыла, так что блок работающих на сдвиг штифтов для крыла перемещается с узлом крыла в продольном направлении, причем
блок работающих на сдвиг штифтов для крыла содержит отверстие для работающего на сдвиг штифта, которое принимает задний работающий на сдвиг штифт и взаимодействует с ним, так что задний работающий на сдвиг штифт выдерживает сдвигающие нагрузки, создаваемые, когда силы, воздействующие на фюзеляж и узел крыла, вызывают перемещение заднего узла держателя работающих на сдвиг штифтов и блока работающих на сдвиг штифтов для крыла в противоположных направлениях перпендикулярно продольной оси.
Следует понимать, что, если только термин не был специально определен в данном документе, отсутствует какое-либо намерение ограничить значение этого термина в явной форме или по смыслу рамками его обычного или нормального значения, при этом такой термин не следует интерпретировать таким образом, что он имеет ограниченный объем значений в любом утверждении, приведенном в любом разделе данного документа (за исключением формулировок пунктов формулы изобретения). В тех случаях, когда какой-либо термин, использованный в пунктах формулы изобретения, приведенной в конце данного документа, приведен в данном документе в соответствии с его одиночным значением, это делается исключительно в целях ясности, а не для того, чтобы ввести читателя в замешательство, при этом не предполагается, что такой термин из пункта формулы изобретения ограничен по смыслу или иным образом указанным одиночным значением.
Реферат
Летательный аппарат включает в себя фюзеляж, имеющий продольную ось, узел крыла и механизм позиционирования фюзеляжа, функционально соединяющий фюзеляж с узлом крыла. Варианты механизма позиционирования фюзеляжа выполнены с возможностью перемещения фюзеляжа относительно узла крыла в продольном направлении параллельно продольной оси между максимально передним положением фюзеляжа и максимально задним положением фюзеляжа. Варианты способа балансировки характеризуют процессы подготовки летательного аппарата с использованием механизма позиционирования фюзеляжа к полету. При этом определяют положение центра тяжести летательного аппарата относительно центра подъемной силы. Фюзеляж может быть перемещен относительно узла крыла с переводом центра тяжести в допустимый диапазон расстояний от центра подъемной силы для балансировки летательного аппарата к полету. Механизм позиционирования фюзеляжа может быть автоматизирован для обеспечения возможности регулировки положения фюзеляжа во время полета летательного аппарата. Группа изобретений направлена на увеличение возможностей эффективного использования летательного аппарата. 7 н. и 8 з.п. ф-лы, 16 ил.
Комментарии