Дирижабль дальнего радиолокационного обнаружения - RU2604914C2
Код документа: RU2604914C2
Чертежи
Описание
Изобретение относится к области радиолокационных систем дальнего обнаружения и воздухоплавания и может быть использовано при разработке радиолокационной станции (РЛС) обзора воздушного, наземного и надводного пространства.
Известен аэростат 420K дальнего радиолокационного обнаружения (ДРЛО), разработанный США для контроля воздушного, надводного и наземного пространства в заданной зоне ответственности (см., например, Верба B.C. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции их развития / Под ред. B.C. Верба. - М.: Радиотехника, 2008. - 432 с.). Данный аэростат оснащен РЛС обнаружения L-88(V)3, расположенной вместе с антенной в радиопрозрачной гондоле. РЛС имеет антенну с размером апертуры 8,7 м, круговой обзор которой обеспечивается ее механическим вращением.
Основным недостатком такого аэростата является то, что РЛС L-88(V)3 работает в сантиметровом диапазоне волн (Х-диапазон), который является малоэффективным для обнаружения малозаметных воздушных целей (беспилотных летательных аппаратов (БЛА), крылатых ракет, самолетов типа «СТЕЛС») (см., например, Верба B.C. Авиационные комплексы радиолокационного дозора и наведения. Состояние и тенденции их развития / Под ред. B.C. Верба. - М.: Радиотехника, 2008. - 432 с.). Более эффективными считаются L- или Р-диапазон. Однако работа РЛС в L- или Р-диапазоне при условии обеспечения требуемых направленных свойств антенны требует значительного увеличения апертуры (до нескольких сотен метров) и массы антенной системы, что практически делает невозможным ее установку и механическое вращение в радиопрозрачной гондоле аэростата.
Также известны проекты дирижаблей, оснащенные РЛС обнаружения, где в качестве антенной системы используется плоская активная фазированная антенная решетка (АФАР), установленная внутри оболочки дирижабля параллельно строительной оси (см., например, Верба B.C., Гандурин В.А. Радиолокатор с синтезированной апертурой на высотном беспилотном дирижабле // Антенны. - 2004. - №8-9. - С. 128-138). Однако в случае использования L- и Р-диапазонов размеры АФАР значительно больше (как минимум на один порядок), что существенно уменьшит рабочий объем дирижабля и соответственно его подъемную силу.
Техническим результатом изобретения является повышение эффективности обнаружения малозаметных целей дирижаблем ДРЛО.
Технический результат достигается тем, что в известном дирижабле, состоящем из оболочки, гондолы, двигателя, винта и бортовой РЛС, установленной в гондоле, антенная система бортовой РЛС выполнена в виде АФАР, приемо-передающие модули (ППМ) и распределительная система питания которой вмонтированы в материал оболочки дирижабля на одной из его боковых сторон, а на противоположной стороне оболочки нанесена контрольная разметка; дополнительно введены оснащенный двумя слабонаправленными излучателями беспилотный летательный аппарат (БЛА) с возможностью взлета и посадки со стартовой площадки, размещенной в гондоле дирижабля, система слежения, установленная на БЛА, а также канал управления БЛА.
Сущность изобретения заключается в том, что на одной из боковых сторон известного дирижабля в материал оболочки вмонтированы ППМ Р-диапазона с распределительной системой питания. Для возбуждения ППМ и управления угловым положением луча диаграммы направленности (ДН) используется БЛА вертолетного типа, оснащенный двумя слабонаправленными излучателями, работающими на разных, но близких по значению частотах. При этом на выходе квадратичного амплитудного детектора каждого ППМ в результате сложения двух разнесенных по частоте сферических волн образуются биения разностной частоты, которые далее усиливаются и переизлучаются в пространство, формируя узконаправленное излучение. Управляя угловым положением БЛА в азимутальной и угломестной плоскостях на определенном расстоянии относительно оболочки дирижабля, изменяются амплитуда и фаза биений на выходе всех ППМ, а соответственно, и угловое положение луча ДН. Таким образом, размещение ППМ Р-диапазона на оболочке дирижабля и возбуждение их с помощью двух слабонаправленных излучателей, установленных на БЛА, позволяет создать антенную систему бортовой РЛС в виде приемо-передающей крупноапертурной выпуклой АФАР, работающей в Р-диапазоне, что способствует повышению вероятности обнаружения малозаметных целей дирижаблем ДРЛО. Описанный способ возбуждения ППМ и управления лучом ДН с помощью двух слабонаправленных излучателей, установленных на БЛА, соответствует основным положениям известной теории нелинейно-дифракционного фазирования (см., например, Бахрах Л.Д., Степаненко C.H., Поваренкин Н.В. Использование квазиволн для фазирования антенных решеток с произвольным расположением модулей // Электромагнитные волны и электронные системы. - 1997. - №6, т. 2. - С. 55-62), достоинством которого считается возможность фазирования решеток с неэквидистантным размещением излучателей без помощи фазовращателей.
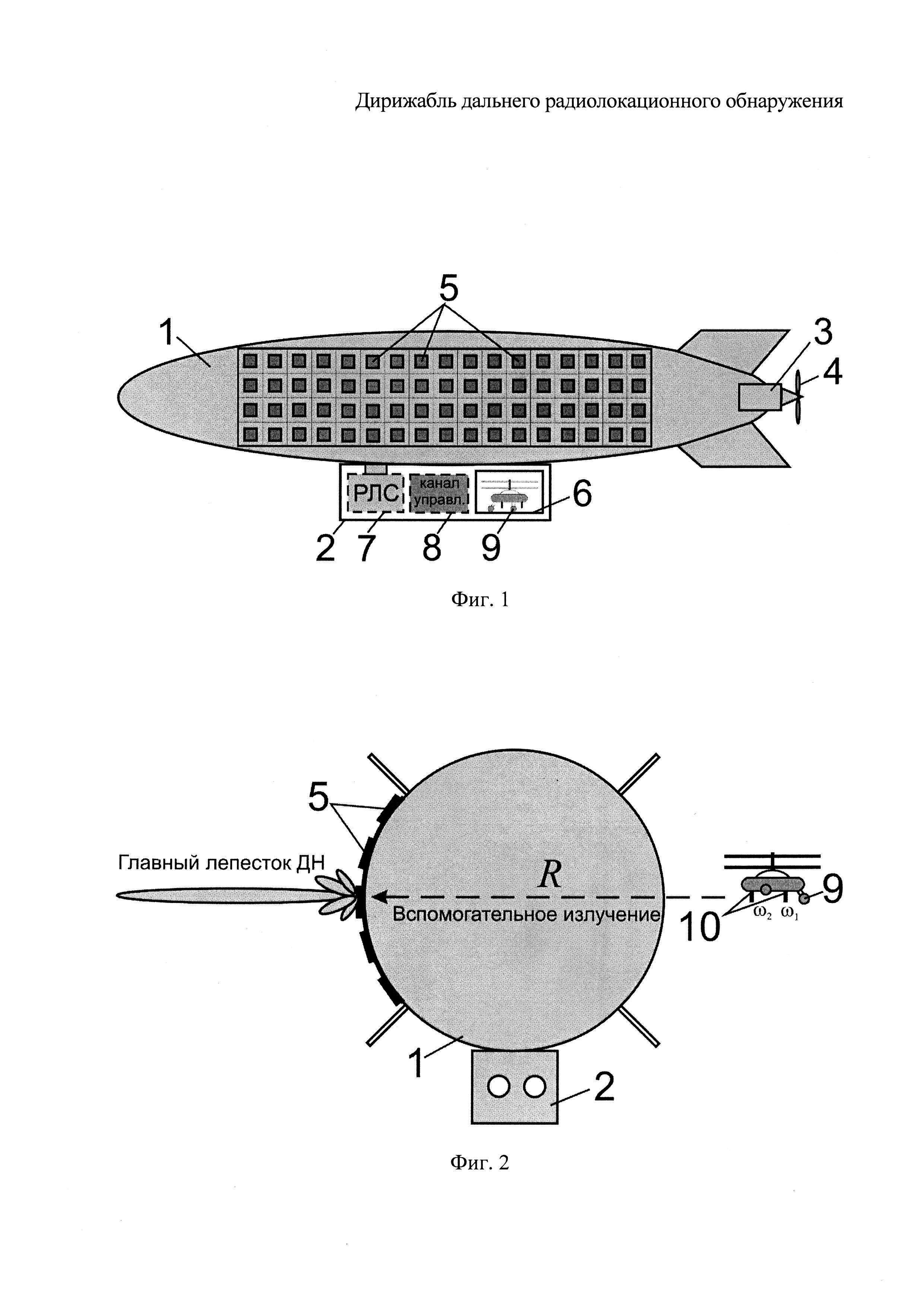
На фигуре 1 представлен вариант исполнения дирижабля ДРЛО, где цифрами обозначены: 1 - оболочка дирижабля, заполненная инертным негорючим газом (например, гелием); 2 - гондола; 3 - двигатель; 4 - винт; 5 - ППМ; 6 - стартовая площадка для БЛА; 7 - РЛС обнаружения (за исключением антенны); 8 - канал управления БЛА; 9 - БЛА вертолетного типа.
Работа устройства поясняется фигурой 2. На фигуре 2 представлен вид спереди дирижабля ДРЛО. Антенная система РЛС обнаружения 7, выполненная в виде вмонтированной в оболочку дирижабля 1 решетки ППМ 5, работает по принципу антенной решетки с оптической схемой питания проходного типа (см., например, Вендик О.Г., Парнес М.Д. Антенны с электрическим сканированием (Введение в теорию) / Под ред. Л.Д. Бахраха. - M.: САЙНС-ПРЕСС, 2002. - 187 с.). При этом внешний облучатель представляет собой два слабонаправленных излучателя 10 с близкими по значению частотами излучения ω1 и ω2, неподвижно установленных в нижней части БЛА вертолетного типа 9. В качестве слабонаправленных излучателей 10 используются слабонаправленные антенны с полупроводниковыми СВЧ-генераторами, достоинством которых является малая масса и габариты. Расстояние между излучателями 10 должно быть на порядок больше излучаемых ими длин волн (исходя из условия меньшего взаимовлияния друг на друга). Сигналы от слабонаправленных излучателей 10, проходя через радиопрозрачную оболочку дирижабля 1, поступают на вход каждого ППМ 5. В ППМ 5 с помощью квадратичного амплитудного детектора выделяются биения, имеющие синусоидальную форму с частотой Ω=ω1-ω2. Выходное напряжение квадратичного детектора используется как сигнал возбуждения в режиме передачи и как гетеродинный сигнал в режиме приема.
В отличие от известной антенной решетки проходного типа, содержащей фазовращатели, сканирование лучом ДН осуществляется вращением по азимуту и углу места БЛА 9 согласно заданной программе. При этом главный лепесток ДН формируется в направлении оси, проходящей через слабонаправленные излучатели 10, в сторону излучателя с меньшей частотой (ω2).
В качестве носителя слабонаправленных излучателей 10 используется БЛА вертолетного типа 9, имеющий конструкцию соосной схемы, поскольку вертолеты данного типа отличаются высокой маневренностью и меньшими габаритами. Для осуществления взлета и посадки БЛА 9 в гондоле 2 оборудована стартовая площадка 6 (фигура 1).
Расстояние R между антенной решеткой и БЛА (фокусное расстояние) определяется радиусом кривизны боковой поверхности оболочки дирижабля 1 в азимутальной плоскости. При таких условиях местоположение большей части ППМ 5 будет совпадать с поверхностью нулевой фазовой погрешности области формирования биений, имеющих плоский фронт, что в свою очередь обеспечивает формирование максимальной площади синфазного раскрыва в решетке (см., например, Неудакин А.А., Малугин К.А. Конформная фазированная антенная решетка с нелинейно-дифракционным способом фазирования // Антенны. - 2012. - №5. - С. 3-10).
Для управления полетом БЛА 9 и режимом излучения слабонаправленных излучателей 10 в состав дирижабля дополнительно введен канал управления 8 (фигура 1). Данный канал может быть реализован по типу известной системы командной радиолинии управления (см., например, Канащенков А.И., Меркулов В.И. Авиационные системы радиоуправления. Т. 3. / Под ред. А.И. Канащенкова, В.И. Меркулова. - М.: Радиотехника, 2004. - 320 с.).
С целью обеспечения режима «висения» БЛА 9 в точке фокуса антенной решетки (фигура 2) в состав его оборудования включена система слежения, а на оболочку с противоположной стороны относительно поверхности с ППМ 5 нанесена контрольная разметка. Работа данной системы аналогична принципу действия известной оптико-электронной системы слежения корреляционного типа (см., например, Авиационные лазерные и оптико-электронные системы / В.М. Сидорин. - М.: ВВИА им. проф. Н.Е. Жуковского, 2003. - 550 с.).
Реферат
Изобретение относится к области использования в области воздухоплавания радиолокационных систем дальнего обнаружения. Дирижабль дальнего радиолокационного обнаружения состоит из оболочки, гондолы, двигателя, винта и бортовой РЛС, установленной в гондоле. Антенная система бортовой РЛС выполнена в виде активной фазированной антенной решетки. Приемо-передающие модули и распределительная система питания вмонтированы в материал оболочки дирижабля на одной из его боковых сторон. На противоположной стороне оболочки нанесена контрольная разметка. В гондоле размещены стартовая площадка для беспилотного летательного аппарата, система слежения и канал управления упомянутым летательным аппаратом, который оснащен двумя слабонаправленными излучателями. Изобретение направлено на повышение эффективности обнаружения малозаметных целей. 2 ил.
Комментарии