Гибридное воздушное судно - RU2160689C2
Код документа: RU2160689C2
Чертежи















Описание
Изобретение имеет отношение к созданию гибридного воздушного судна, а более конкретно гибридного воздушного судна с вертикальным взлетом и посадкой (VTOL), с пробегом и вертикальным взлетом и посадкой (R-VTOL) и/или со сверхкоротким пробегом и вертикальным взлетом и посадкой (S-STOL). Термин "гибридное" судно означает, что в его конструкции использованы все четыре известных принципа образования подъемной силы, а именно аэродинамическая подъемная сила, эффект влияния близости земли, подъемная сила, образуемая за счет тяги, и статическая подъемная сила.
Необходимость перевозки тяжелых грузов и/или большого числа пассажиров на значительные расстояния быстро, эффективно и экономически выгодно привела к созданию различных конструкций воздушных судов, имеющих коммерческую нагрузку от средней до высокой (от 30 до 100 тонн), которые успешно применяются на средних и больших дистанциях, причем для поддержки операций таких судов имеется разветвленная наземная инфраструктура.
В настоящее время отсутствуют проекты по созданию соответствующим образом сбалансированных транспортных услуг, чтобы обеспечить возможность перевозки средней коммерческой нагрузки (30 - 40 тонн) с крейсерской скоростью ориентировочно до 400 км/час, с комфортом, обеспечиваемым в широкофюзеляжном салоне, при операционных возможностях VTOL и S-STOL, на полетных расстояниях от малых до средних (150 - 1000 миль), при высокой экономичности транспортировки и при возможности использования неподготовленных посадочных полей и/или устаревших и/или существующих наземных авиационных инфраструктур, при функциональном совмещении с работой существующей коммерческой сети авиаперевозок.
В семидесятых и восьмидесятых годах возникли новые принципы создания воздушных судов, которые можно рассматривать как попытку проектирования воздушного судна со специфическими характеристиками. Эти воздушные суда, которые обычно именуют воздушными судами более легкими, чем воздух (LTA), основаны на принципах создания подъемной силы за счет плавучести. С учетом использования статического подъемного газа такое LTA воздушное судно должно иметь огромный размер и объем, чтобы обеспечить достаточную (30 - 50 тонн) подъемную силу. Подобное воздушное судно имеет ряд серьезных недостатков. Оно обладает неудовлетворительными характеристиками управления на малых скоростях, его трудно обслуживать на земле, а процедуры, связанные с использованием балласта, делают загрузку и разгрузку судна непрактичной. Кроме того, такие воздушные судна не могут быть приспособлены к существующим структурам авиационной поддержки и не способны поддерживать скорости более 160 км/час из-за отрицательного воздействия лобового сопротивления, вызванного их большими объемами, что приводит к низкой производительности перевозок.
Уже были предприняты попытки повышения скорости LTA за счет создания "гибридных воздушных судов", как это показано, например, в патенте США N 4,591,112 на имя Пясецки и др., в котором LTA снабжен средствами создания тяги, в результате чего созданная статическая подъемная сила обеспечивает компенсацию собственного веса конструкции судна и средств создания тяги. Предложенное решение все еще не позволяет обеспечить высокие скорости полета, так как указанное воздушное судно имеет большое поперечное сечение и, соответственно, высокое лобовое сопротивление. Предложенное гибридное воздушное судно также создает проблемы наземного обслуживания из-за его чрезмерного физического размера. Его низкие скорости полета (110-130 км/час) совершенно не подходят для коммерческого использования при транспортировке пассажиров. Это воздушное судно может быть использовано только для осуществления специальных заданий, таких как применение в качестве подъемного крана. Другой критичной инженерной проблемой, с которой сталкиваются в таких конструкциях, является воздействие вибрационных сил, создаваемых средствами тяги вертолетного типа, на плохо интегрированные объемные опоры тяговых средств и на конструктивные элементы планера.
Дальнейшие усилия по улучшению гибридного летательного аппарата привели к созданию частично плавучих летательных аппаратов, которые обладают некоторой ограниченной подъемной силой за счет формы их корпуса (фюзеляжа). Пример такого летательного аппарата содержится в патенте США N 4,052,025 на имя Кларка и др. Этот летательный аппарат в действительности представляет собой воздушное судно чрезвычайно больших размеров, которое не может использовать существующую авиационную инфраструктуру. Этот летательный аппарат является чрезвычайно сложным и дорогостоящим при конструировании, причем каждая из панелей фюзеляжа имеет различную конфигурацию. Кроме того, базовая конструкция фюзеляжа в виде спиральной намотки не обладает жесткостью, что не позволяет воздушному судну достигать средних и высоких крейсерских скоростей полета порядка 400 км/час. Инженерные проблемы создаются в результате огромного размаха крыльев воздушного судна и других его больших размеров, что делает наземное обслуживание этого частично плавучего летательного аппарата затруднительным, аналогично воздушному судну LTA. Кроме того, этот частично плавучий летательный аппарат не обладает возможностями VTOL или R-VTOL. Указанный тип летательного аппарата позволяет транспортировать большие коммерческие нагрузки на очень большие расстояния. Однако в сравнении с другими воздушными судами, такими как большие реактивные аэробусы, частично плавучий летательный аппарат не является конкурентоспособным в терминах коммерческой нагрузки, скорости и общей эффективности.
В той же самой категории судов был предложен частично плавучий летательный аппарат с использованием "щитка реактивной струи" в сочетании с обладающим подъемной силой корпусом, см. патент США N 4,149,688 на имя Дж. Миллера. Несмотря на то, что это воздушное судно представляется подходящим для обеспечения короткого взлета и посадки, его возможность VTOL не обладает эффективностью, так как дельтовидная форма судна плохо сочетается со средствами создания тяги (с трастерами), в особенности с большими трастерами, эффективными для создания вертикальной тяги. Расположенные в задней части судна трастеры препятствуют получению хороших характеристик VTOL, так как их спутная струя сталкивается с задним концом корпуса судна. Кроме того, трастеры при осуществлении функции VTOL, когда они находятся в предложенных положениях в носовой части судна и у его кормы, будут создавать наземные эффекты скоса потока вниз (при обтекании профиля), что приводит к значительной разбалансировке моментов тангажа воздушного судна при его зависании. Более того, структурно такой дельтовидный фюзеляж неэффективен и дорог при его построении.
Вертолеты представляют собой обычные воздушные суда VTOL, однако они являются сложными и дорогостоящими в эксплуатации. Так как вся подъемная сила вертолета получена от его двигателей, он не способен перевозить большие коммерческие нагрузки (коммерческие нагрузки более 10 тонн) на средние (1 000 миль) расстояния, так как большая часть полезной нагрузки образована топливом. Перевозка пассажиров и сыпучих грузов малой плотности при помощи вертолета является дорогостоящей из-за ограниченного пространства салона или ангара для груза. Однако вертолеты имеют преимущества при доставке приоритетных грузов в удаленные местности, не имеющие авиационной инфраструктуры или доступа по земле, когда их способность VTOL оправдывает понесенные расходы. Были предприняты попытки улучшения возможности транспортирования при помощи вертолета за счет увеличения размера и числа несущих винтов. Однако это не привело к существенному улучшению коммерческой привлекательности вертолетного транспорта.
Еще одной конструкцией воздушного судна, которое предназначено для решения проблем воздушной транспортировки на короткие (до 500 миль) расстояния, является воздушное судно с наклонным несущим винтом, известное также как Bell Boеing V-22. Такое воздушное судно имеет большие, обладающие возможностью наклона несущие винты, которые позволяют судну иметь как возможность VTOL, так и горизонтальную тягу. Воздушное судно такого типа имеет фиксированные крылья, которые обеспечивают некоторую аэродинамическую подъемную силу. Подобно вертолету, воздушное судно с наклонным несущим винтом является дорогостоящим при производстве и в эксплуатации, оно не позволяет перевозить крупногабаритные грузы и имеет салон с малым объемом и комфортом. Такое судно не обеспечивает экономически эффективную перевозку пассажиров. Главным преимуществом воздушного судна с наклонным несущим винтом по сравнению с вертолетом является возможность транспортировки коммерческих грузов на более высоких скоростях. Однако в связи с более высокой стоимостью воздушного судна с наклонным несущим винтом его единственная область применения связана с доставкой военных грузов, когда имеет значение скорость доставки, причем эта область ограничена некоторыми специальными операциями разведки. Можно полагать, что до настоящего времени воздушное судно с наклонным несущим винтом не нашло коммерческого применения.
Воздушное судно с наклонным несущим винтов и с имеющими возможность изменения наклона крыльями раскрыто в краткой технической информации NASA "Воздушное судно с имеющими возможность изменения наклона крыльями и с имеющим возможность изменения наклона несущим винтом", май 1986 г.
Гибридное воздушное судно раскрыто в заявке ФРГ 3,508,101 на имя Бота. Фюзеляж этого судна образует резервуар подъемного газа и имеет главным образом форму яйца. На воздушном судне закреплены аутригеры, на которых установлены 4 воздушных винта (пропеллера), имеющие возможность изменения наклона.
В патенте США N 2,462,201 на имя Килгора и др. описана электрическая система создания тяги воздушного судна. В патенте США N 3,110,456 на имя Кризи описано воздушное судно с вертикальным взлетом, которое приводится в движение при помощи установленных в воздуховодах (коробах) вентиляторов, вертикальные оси которых встроены в секции крыльев воздушного судна.
В соответствии с настоящим изобретением предлагается воздушное судно, которое обеспечивает баланс возможности транспортировки коммерческого груза от 5 до 50 тонн, полезных крейсерских скоростей полета в определенном диапазоне расстояний, способность работы как с существующими, так и с устаревшими (недоразвитыми) авиационными инфраструктурами, а также возможность взлета и посадки на неподготовленных полях.
Предлагаемое воздушное судно обладает возможностями VTOL или R-VTOL и S-STOL, при использовании ориентировочно 30% длины ВПП, необходимой для обычного воздушного судна, а также обладает возможностью достижения средней крейсерской скорости в диапазоне от 280 до 370 км/час. Предлагаемое воздушное судно имеет существенно увеличенный салон для пассажиров и увеличенное пространство для размещения груза по сравнению с обычными самолетами и вертолетами; это судно имеет разумную стоимость производства, технической эксплуатации и обслуживания. Воздушное судно в соответствии с настоящим изобретением может быть изготовлено с размерами, сопоставимыми с обычными самолетами, что позволяет использовать имеющиеся структуры авиационной поддержки и обслуживания.
В связи с разносторонними возможностями предлагаемого воздушного судна и его высокой экономической эффективностью оно может быть использовано в самых различных областях применения. Например, воздушное судно в соответствии с настоящим изобретением полезно для комбинированной транспортировки пассажиров и доставки легких приоритетных грузов, а также для доставки тяжелых грузов с комбинированными операционными возможностями R-VTOL и VTOL в регионы, где отсутствуют обычные авиационные инфраструктуры. Воздушное судно полезно при проведении воздушных операций на малой скорости или малой высоте, таких как наблюдение, патрулирование, поиск или спасение. Воздушное судно полезно при использовании в высокоразвитых промышленных зонах для точечной доставки пассажиров и груза на очень малые расстояния (150- 300 км), при обслуживании челночного типа с множеством остановок.
Предлагается воздушное судно, которое имеет определенную геометрию планера с размещением (конфигурацией) крыльев тандемом (последовательно друг за другом), что обеспечивает увеличенную безопасность в результате существенно уменьшенных скоростей взлета и посадки, которые типично составляют от 90 до 150 км/час, причем форма фюзеляжа такова, что воздушное судно главным образом не может сваливаться, при этом указанная форма обеспечивает воздушную подушку безопасности под фюзеляжем при VTOL и R-VTOL.
В соответствии с первым аспектом настоящего изобретения предлагается воздушное судно, которое имеет фюзеляж с множеством крыльев, которые выполнены в виде аэродинамических профилей, выступающих относительно фюзеляжа. Каждое из крыльев имеет средство обеспечения тяги, такое как, например, пропеллер или жесткий пропеллер - несущий винт, установленный на крыле. Каждое из крыльев имеет возможность поворота относительно его нейтральной аэродинамической оси давления, причем каждое из средств обеспечения тяги также установлено с возможностью независимого поворота. Движение поворота крыльев и средств создания тяги является управляемым и в сочетании обеспечивает тяговые усилия подъема, тяговые усилия управления и прямые тяговые усилия. В соответствии с первым вариантом настоящего изобретения движение поворота всех элементов контролируется (управляется) компьютером, при этом обеспечиваются главным образом мгновенные усилия управления, например, при появлении бокового порыва ветра и т.п.
Поворот крыльев осуществляется относительно их нейтральной оси, так что требуется минимальное усилие для осуществления существенных изменений в положении индивидуального крыла. Это позволяет главным образом мгновенно приложить вектор сил, вырабатываемый при воздействии спутной струи пропеллера на крыло, для получения моментов управления, например, для дифференциального отклонения двух секций крыла, левой и правой, для противодействия ротационному моменту, создаваемому боковым порывом ветра. Когда требуются большие усилия для поддержания желательного положения воздушного судна, тогда несущие винты могут быть приведены в действие для изменения их наклона, чтобы создать дополнительные существенные усилия управления.
В соответствии с другим аспектом настоящего изобретения предлагается такая форма фюзеляжа воздушного судна, которая позволяет получить существенный эффект подъема с земли, содействующий операциям VTOL и существенно улучшающий параметры подъемной силы VTOL. Эффект подъемной силы с земли получают за счет использования множества пропеллеров, смещенных относительно фюзеляжа и установленных таким образом, чтобы создать главным образом вертикальную тягу. Пропеллеры расположены со смещением относительно фюзеляжа, так что их спутные струи главным образом не сталкиваются с фюзеляжем. При таком размещении пропеллеров, при первоначальном отрыве от земли, 50% воздушной массы, которая нагнетается вертикально вниз при помощи каждой из тяговых колонок пропеллеров, отклоняется поверхностью земли для перемещения внутрь под фюзеляж. Эти воздушные массы от каждого из пропеллеров сталкиваются и принудительно направляются вверх, создавая при этом воздушную подушку под фюзеляжем, действующую в направлении вверх для создания эффекта подъема (отрыва) с земли. Преимущественно пропеллеры вращаются таким образом, что их направление вращения в виде сверху направлено к центральной точке фюзеляжа. Например, 4 пропеллера в носовой и кормовой части, слева и справа, могут иметь противоположные направления вращения.
В соответствии с другим аспектом настоящего изобретения фюзеляж обеспечивает основную аэродинамическую подъемную силу в R-VTOL и S-STOL. После достижения крейсерского режима фюзеляж разгружается и до 50% необходимой аэродинамической подъемной силы создается секциями крыльев. Это позволяет увеличить отношение подъемная сила/лобовое сопротивление до величин (8 - 1), сопоставимых с крыльями обычной конструкции. Форма фюзеляжа такова, что он обладает переменной кривизной профиля на своих верхней и нижней поверхностях, в результате чего он обладает большей аэродинамической подъемной силой в воздушном потоке. Аэродинамическая подъемная сила фюзеляжа позволяет воздушному судну в режимах R-VTOL и S-STOL увеличивать грузоподъемность на 100-120% по сравнению с грузоподъемностью в режиме VTOL. В соответствии с предпочтительным вариантом настоящего изобретения размеры фюзеляжа воздушного судна выбирают таким образом, чтобы одновременно максимально повысить грузоподъемность воздушного судна и свести к минимуму лобовое сопротивление, чтобы таким образом оптимизировать эффективность транспортировки.
В соответствии с еще одним аспектом настоящего изобретения фюзеляж сконструирован таким образом, что он сохраняет жесткость и может выдерживать скорости полета ориентировочно до 400 км/час. Фюзеляж воздушного судна сконструирован из множества поперечных колец, с расположенными между ними модульными элементами, работающими на скручивание, в результате чего формируется образованная из треугольников пространственная оболочковая рама геодезического типа. Жесткая внешняя композитная оболочка полужестким образом смонтирована вокруг пространственной оболочковой рамы. Дополнительные средства внутреннего наддува делают планер при нормальных условиях крейсерской нагрузки напряженной, за счет приложения давления, структурой, что увеличивает жесткость ориентировочно на 50% в сравнении с планером без наддува. Размеры пространственной оболочковой рамы выданы таким образом, чтобы обеспечить структурную целостность планера при аварийном отключении давления. При этом безопасный полет может быть продолжен при снижении крейсерских скоростей ориентировочно до 200 - 220 км/час.
Воздушное судно в соответствии с настоящим изобретением может иметь привод от любой подходящей силовой системы. Например, может быть использован привод с обычной кинематической цепью. В соответствии с другим аспектом настоящего изобретения может быть использована турбоэлектрическая система привода. Турбоэлектрическая система привода включает в себя центральную газовую турбину и средства передачи мощности к средствам создания тяги. Подобная система имеет различные преимущества по сравнению с обычной системой, в том числе обеспечивает уменьшение веса и исключение поперечной трансмиссии. Кроме того, при установке турбины внутри фюзеляжа имеются внутренние каналы для отвода горячих газов от турбины. При таком построении силовой установки выхлопные газы могут быть использованы для обогрева салона, устранения возможного обледенения критических поверхностей или, по желанию, для создания статической подъемной силы.
В соответствии с еще одним аспектом настоящего изобретения при проектировании геометрии фюзеляжа использованы новые для авиации методы конструирования, которые можно назвать "подходом к конструированию планера с большими компонентами". Этот метод позволяет изготовить планер из существенно уменьшенного числа (номенклатуры) различных компонентов. Различные узлы планера могут быть созданы из меньшего числа балок среднего размера и панелей за счет использования композитных технологий, а не дорогой технологии отверждения с расщеплением. Использование технологии соединения и самоустановки компонентов облегчает процесс сборки такого воздушного судна. В результате меньших скоростей судна и сниженной аэродинамической нагрузки можно использовать менее дорогие материалы, такие как кевлар, E-стекла и формуемые термопластики.
В соответствии с настоящим изобретением могут быть использованы средства создания тяги (воздушные винты) любого типа, например пропеллер - несущие винты или высокоскоростные вентиляторы. В случае использования высокоскоростных вентиляторов их размещают у корпуса фюзеляжа и в таком случае воздушное судно именуют "передовым гибридным воздушным судном" (AHA). Преимущественно используют от 8 до 12 вентиляторов, например, диаметром от 2, 5 до 4 м, которые установлены вдоль горизонтальной осевой линии фюзеляжа и снабжены дефлекторами тяги для обеспечения диапазона направлений тяги. Могут быть установлены также другие вентиляторы для создания направленной или передней крейсерской тяги, например, у кормы фюзеляжа. Такое воздушное судно обладает прекрасными характеристиками удержания по курсу в любых режимах полета.
Таким образом, в соответствии с широким аспектом настоящего изобретения, предлагается воздушное судно, которое включает в себя фюзеляж, множество крыльев, имеющих форму аэродинамических профилей, установленных относительно фюзеляжа со смещением друг от друга, причем каждое крыло имеет возможность поворота относительно нейтральной оси аэродинамического давления, и средства создания тяги, установленные на каждом крыле и имеющие возможность поворота независимо от крыла.
В соответствии с другим широким аспектом настоящего изобретения предлагается воздушное судно, которое включает в себя фюзеляж, имеющий верхнюю поверхность и нижнюю поверхность, а также геометрическую центральную точку, вертикальную ось, проходящую через центральную точку, множеств средств создания тяги, установленных на фюзеляже со смещением относительно центральной точки, причем каждое из средств создания тяги установлено таким образом, что оно обеспечивает тягу главным образом параллельно вертикальной оси и создает спутную струю, направленную к нижней поверхности фюзеляжа, причем форма нижней поверхности такова, что она улавливает спутную струю, которая отклоняется под фюзеляж.
В соответствии с еще одним широким аспектом настоящего изобретения предлагается воздушное судно, которое включает в себя фюзеляж, имеющий продольную ось и такую форму, которая обеспечивает существенную аэродинамическую подъемную силу в воздушном потоке, причем фюзеляж имеет коэффициент формы в диапазоне от 1 до 2,5 и отношение толщины хорды фюзеляжа в диапазоне от 3 до 4,5.
В соответствии с дополнительным аспектом настоящего изобретения предлагается фюзеляж воздушного судна, поперечное сечение которого образовано четырьмя дуговыми сегментами, соединенными тангенциально.
В соответствии с другим аспектом настоящего изобретения предлагается воздушное судно, которое включает в себя фюзеляж, имеющий продольную ось, причем фюзеляж включает в себя множество соединенных последовательно секций рамы, каждая из которых установлена главным образом ортогонально к продольной оси, и множество торсионных (работающих на скручивание) элементов, расположенных между смежными последовательными секциями рамы, при этом кольца и торсионные элементы соединены между собой с образованием рамы из треугольников.
В соответствии с другим аспектом настоящего изобретения предлагается воздушное судно, которое включает в себя фюзеляж, имеющий множество секций крыльев, закрепленных на нем, и множество средств создания тяги, причем средства создания тяги имеют привод от турбоэлектрической системы привода, которая содержит газовую турбину, генератор переменного тока и систему управления и передачи мощности, для подачи мощности, вырабатываемой газовой турбиной, на средства создания тяги.
В соответствии с дополнительным аспектом настоящего изобретения предлагается воздушное судно, которое включает в себя фюзеляж, имеющий такую форму, которая обеспечивает существенную аэродинамическую подъемную силу в воздушном потоке, множество секций крыльев, закрепленных на фюзеляже, и множеств высокоскоростных вентиляторов, установленных определенным образом относительно фюзеляжа и имеющих средства отклонения тяги, установленные совместно с вентиляторами для обеспечения определенного диапазона направлений тяги.
Указанные вкратце ранее и другие характеристики изобретения будут более ясны из последующего детального описания, приведенного со ссылкой на сопроводительные чертежи, на которых показаны только типичные варианты осуществления настоящего изобретения и которые не следует считать ограничивающими объем настоящего изобретения.
На фиг. 1 показан вид в перспективе воздушного судна; можно видеть его полную внешнюю конфигурацию, причем пропеллеры показаны в горизонтальном положении тяги.
На фиг. 2 показан вид сбоку воздушного судна фиг. 1, причем пропеллеры показаны в вертикальном положении тяги; можно видеть построение салона и кабины экипажа.
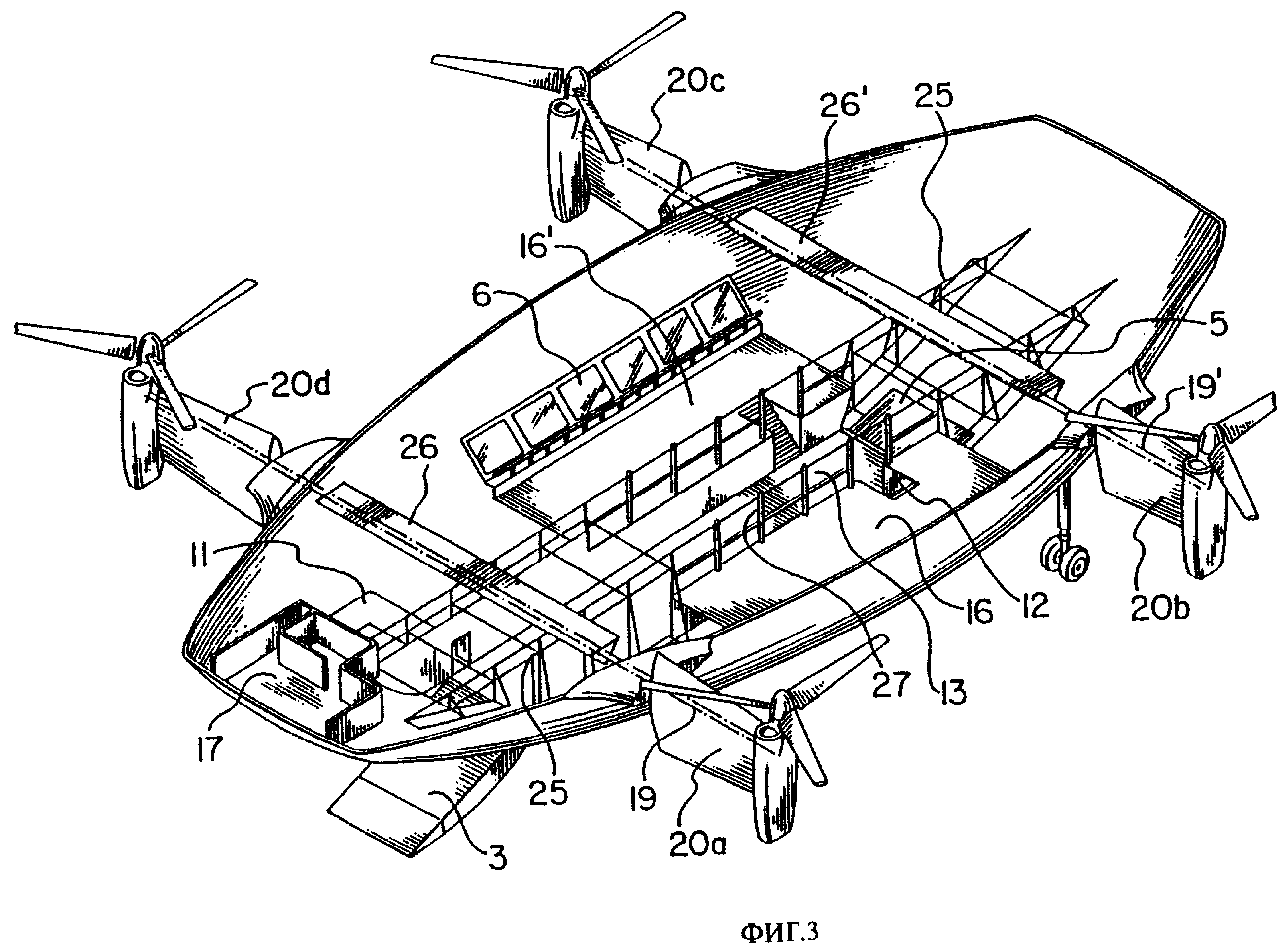
На фиг. 3 показан вид в перспективе нижнего фюзеляжа со снятой верхней частью поверхности подъемного корпуса судна.
На фиг. 4А отображены геометрические принципы образования конструкции фюзеляжа в поперечном сечении.
На фиг. 4В приведен схематично вид в перспективе, отображающий геометрические принципы образования конструкции компонентов фюзеляжа.
На фиг. 5А показан вид спереди, иллюстрирующий принципы создания эффекта подъема (отрыва) с земли.
На фиг. 5В приведен вид сверху, иллюстрирующий вихревую картину, создаваемую установленным в четырех положениях трастерами под подъемным корпусом судна.
На фиг. 6А приведен вид в перспективе фюзеляжа с его конструктивными элементами.
На фиг. 6В показано поперечное сечение по линии 6b - 6b фиг. 6А.
На фиг. 6С приведен вид в перспективе коробчатого пластинчатого узла (элемента) поверхности фюзеляжа.
На фиг. 6D приведен вид в перспективе типичной одиночной секции корпуса, причем показаны также киль, пространственная оболочковая рама и поперечные ребра.
На фиг. 7A приведен вид в перспективе и в сечении узлового соединителя рамы, совместно с направляющей и устройством зажима троса, а также с множеством пространственных элементов рамы.
На фиг. 7B показано поперечное сечение узлового соединителя рамы, совместно с направляющей и устройством зажима троса, а также с множеством пространственных элементов рамы.
На фиг. 8A приведен вид в перспективе узлового соединителя оболочковой рамы, причем показана секция ребра, стыкующаяся с внешней крышкой.
На фиг. 8B показано поперечное сечение узлового соединителя оболочковой рамы, причем показана секция ребра, стыкующаяся с внешней крышкой, а также соединительный элемент панели крышки.
На фиг. 8C показан вид сбоку, где можно видеть секцию ребра, установленную между пространственной оболочковой рамой и панелями внешней крышки.
На фиг. 8D показано сечение соединителя панели внешней крышки.
На фиг. 8E показано поперечное сечение альтернативной панели поверхности фюзеляжа.
На фиг. 8F показано поперечное сечение альтернативной панели поверхности фюзеляжа с встроенным воздуховодом.
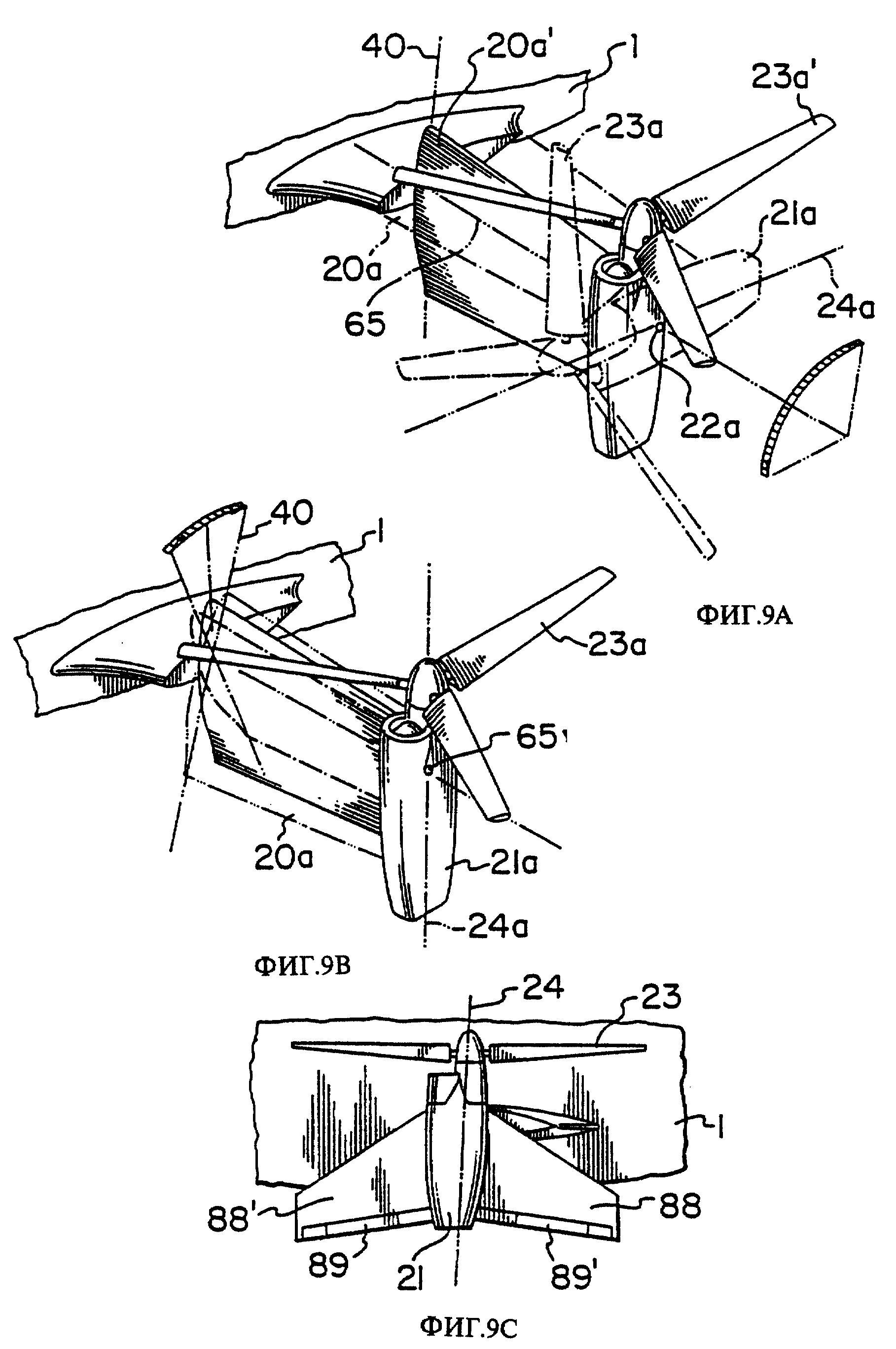
На фиг. 9A показан вид в перспективе пропеллера и секции крыла для воздушного судна, показанного на фиг. 1, причем можно видеть диапазоны поворота, полезные в соответствии с настоящим изобретением.
На фиг. 9B приведен вид в перспективе, показывающий возможность вертикального наклона независимой секции крыла, причем отображен диапазон дифференциального вертикального наклона.
На фиг. 9C приведен вид сбоку, где показано альтернативное построение пропеллера, имеющего стабилизатор, соединенный с гондолой двигателя.
На фиг. 10 приведена блок-схема, где можно видеть основные элементы системы управления полетом.
На фиг. 11 приведена блок-схема, где можно видеть цепи турбоэлектрической системы привода (TEDS).
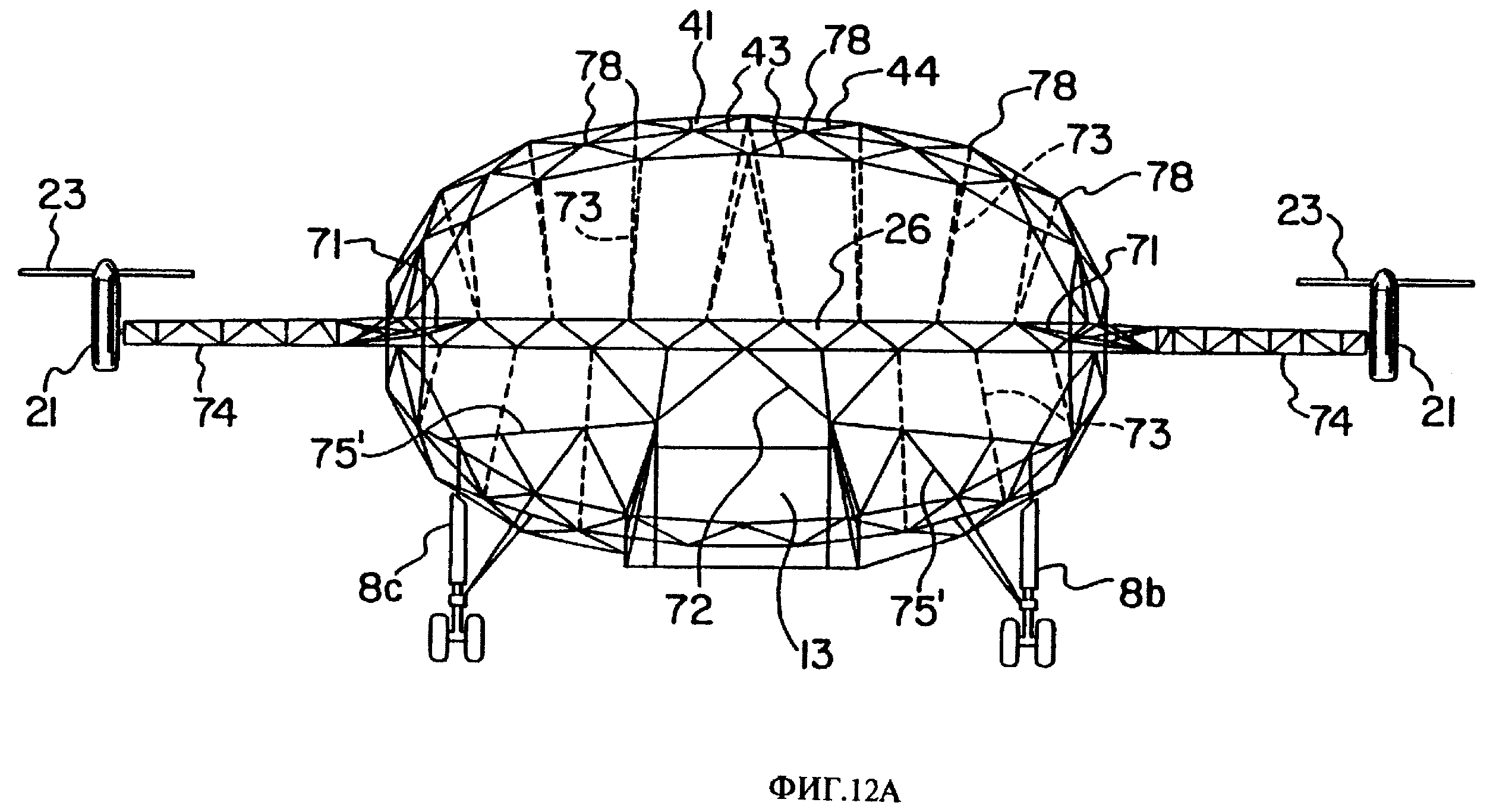
На фиг. 12A показано поперечное сечение корпуса воздушного судна с встроенной в него несущей сквозной балкой.
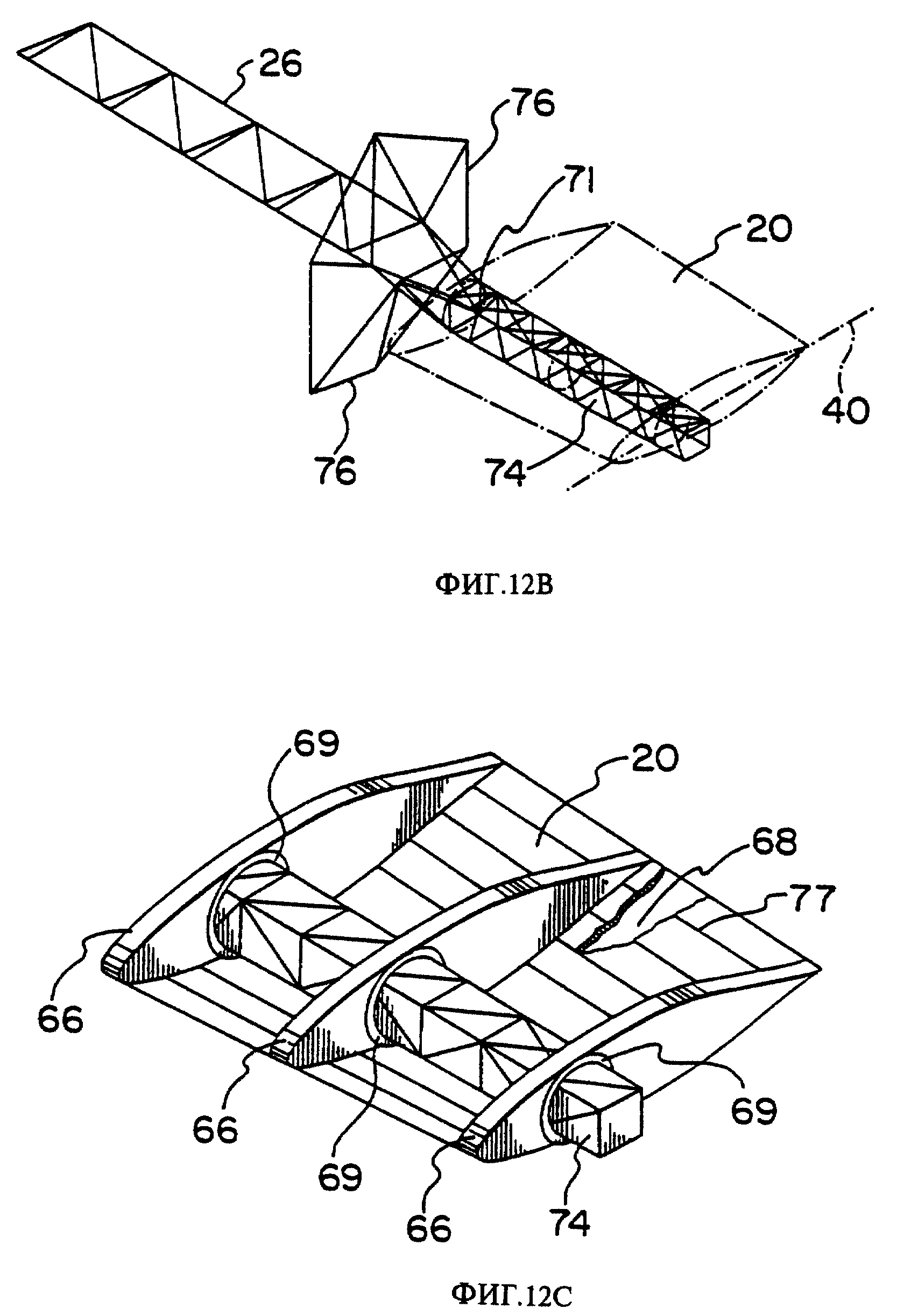
На фиг. 12B показан вид в перспективе внутренней рамы в месте ее стыка с несущей сквозной балкой и с аутригером.
На фиг. 12C показан вид в перспективе внешнего аутригера и поворотной секции крыла.
На фиг. 13A показан вид сверху альтернативного судна AHA.
На фиг. 13B схематично показан вид спереди альтернативного судна АНА, где можно видеть построение трастера.
На фиг. 13С схематично показан вид сбоку, где можно видеть построение трастера альтернативного судна AHA.
На фиг. 13D приведено поперечное сечение блока вентилятора, который использован в альтернативном судне AHA фиг. 13A.
Начнем детальное описание настоящего изобретения с глобального обзора основных параметров воздушного судна и основных строительных блоков его планера (корпуса летательного аппарата). Затем рассмотрим аспекты "простой геометрии", которые создают основу для упрощения производства судна; после этого рассмотрим специфические являющиеся предметом изобретения механические аспекты построения фюзеляжа с наддувом. После этого будут рассмотрены аспекты управления судном, а затем будет приведено описание передовой системы создания тяги, которая особенно хорошо подходит для воздушного судна в соответствии с настоящим изобретением. В конце будет представлен второй альтернативный вариант гибридного воздушного судна в соответствии с настоящим изобретением.
Обратимся к рассмотрению фиг. 1, 2 и 9А, на которых показан преимущественный вариант гибридного воздушного судна (НА) в соответствии с настоящим изобретением. Воздушное судно имеет подъемный корпус (фюзеляж) 1 и четыре создающих тягу пропеллера - несущих винта 23a, 23b, 23c и 23d, которые установлены по обеим сторонам фюзеляжа относительно его центральной линии в носовой и хвостовой части судна, на концах аутригеров 74 (фиг. 12А и 12В). Четыре секции крыльев 20а, 20b, 20с и 20d установлены тандемом (друг за другом), что лучше всего видно на фиг. 1, и обладают возможностью поворота относительно аутригеров у их нейтральных осей аэродинамического давления 65 (фиг. 9А). Четыре создающих тягу пропеллера - несущих винта 23а, 23b, 23с и 23d имеют привод от двигателей, установленных в гондолах 21а, 21b, 21с и 21d; в своем горизонтальном положении (показанном штрих-пунктиром на фиг. 9А) они создают тягу для толкания воздушного судна вперед, а в вертикальном положении пропеллеры - несущие винты создают статическую вертикальную тяговую подъемную силу и тягу управления одновременно в VTOL, при зависании (парении) и в R- VTOL. Вращение пропеллеров - несущих винтов относительно оси 24а может быть организовано индивидуально, с независимым поворотом относительно оси 22а, проходящей через гондолу двигателя 21а, обычно в диапазоне от - 10o до 90o относительно вертикали. Преимущественно ось 65 крыльев 20 является совмещенной с осью 22 блоков пропеллеров - несущих винтов 21, 23. Как это будет обсуждаться далее более подробно, каждый блок пропеллеров - несущих винтов 21а, 23а состоит из пропеллера - несущего винта, двигателя, редуктора, системы смазки и установленного в гондоле устройства сочленения с поперечной силовой трансмиссией. Поперечная силовая трансмиссия 19, 19' установлена внутри фюзеляжа и поддерживается сквозными балками.
Обратимся теперь к рассмотрению фиг. 1, 2, 3, 6А и 6В, на которых показано расположение компонентов основной субсистемы и структурных элементов, несущих и распределяющих основную нагрузку всего планера "НА". В нижней части подъемного корпуса фюзеляжа 1 встроен большой киль 25. У киля 25 перпендикулярно ему идут две несущие сквозные балки 26, 26' в носовой и хвостовой части фюзеляжа 1. Эти балки 26, 26' соединены с килем 25 и конструкцией пространственной оболочковой рамы 41. Дополнительные балочные раскосы 75, 75' (фиг. 12А) стыкуются с килем 25 и оболочковой рамой 41; они проходят через нижний донный корпус, наружу с левой и правой сторон киля 25 у положения заднего шасси 8b, 8c. Балочные раскосы 75, 75' поглощают и перераспределяют нагрузки от шасси 8а, 8b и 8c и передающих на киль 25 и на нижние части фюзеляжа 1. Шасси 8а, 8b и 8c выполнено по традиционной трехточечной схеме. Жесткая точка для осуществления внешних операций подъема (подвески) груза обеспечена при помощи крюка 10, выступающего из нижней средней секции фюзеляжа, и упрочняющего раскоса 10' внутри фюзеляжа. Структурно он встроен в киль 25.
В нижнем фюзеляже также образованы поперечные ребра 50, 50'. Эти ребра 50, 50' выполнены в виде раскосов, встроены в оболочку 41 и киль 25 и следуют за кривизной нижнего фюзеляжа. Киль 25, балки 75, 75' и поперечные ребра 50, 50' совместно образуют наиболее прочную часть планера. Нижний фюзеляж ограничен оболочкой 30, образованной коробчатыми пластинчатыми элементами 54, которые соединены таким образом, что они способствуют созданию дополнительной жесткости фюзеляжа. Указанная оболочка 30 нижнего фюзеляжа воздушного судна функционально должна обладать наивысшей механической жесткостью поверхности. На нижнюю оболочку 30 воздействуют существенные аэродинамические и механические поверхностные силы в результате ударных нагрузок при обработке судна на земле, за счет эффекта воздействия поверхности земли, например ударов гравия при VTOL, а также при приводнении.
Преимущественно воздушное судно также содержит закрытые конструкции 48, 48', которые разделяют верхнюю половину внутреннего пространства фюзеляжа от нижней половины, причем внутри киля 25 образуется нижний салон 13, а верхние салоны 14 образуются за счет платформы 16 и половых балок, поддерживаемых ребрами 50, 50'. Двухпалубная концепция обладает существенными преимуществами по сравнению с обычной однопалубной концепцией воздушного судна, так как легкие объемные грузы, например пассажиры или посылки (почтовые отправления), могут перевозиться в верхних салонах 14, в то время как пространство нижнего ангара 13 специально оборудуется для перевозки тяжелых грузов и может выдерживать большие точечные нагрузки. Для типичной ширины фюзеляжа 6 - 7 м ангар на нижней палубе "НА" может быть использован для перевозки 30 тонн коммерческого груза, при этом существенное дополнительное пространство салона, например до 110% от размера нижнего ангара, может быть получено за счет введения платформы 16 и образования верхнего салона 14. Указанным образом может быть реализована 100% расчетная загрузка воздушного судна по весу. В верхней кабине могут располагаться пассажиры или груз малой плотности (7 - 10 фунтов на кв. фут). Это дает особые операционные преимущества при работе воздушного судна в режимах R-VTOL или S-STOL, так как в таком случае судно может поднимать коммерческую нагрузку на 100-120% больше в сравнении с его операциями в режиме VTOL.
Для облегчения транспортировки пассажиров предусмотрены трапы 12а, 12b, обеспечивающие сообщение между нижним и верхним салонами 13 и 14. Кроме того, предусмотрена задняя дверь доступа 5. Погрузка и разгрузка груза может быть осуществлена при помощи широкого переднего пандуса 3, который открывается в нижний ангар 13. Это может быть осуществлено без применения специального погрузочно-разгрузочного оборудования, что позволяет сократить время погрузки и разгрузки. Кроме того, в верхнем салоне 14 могут быть предусмотрены широкие иллюминаторы 6, которые могут быть выполнены в результате гораздо меньшего дифференциального давления между салоном и пространством окружающего воздуха, чем в обычном самолете. Эта проектная характеристика основного верхнего пассажирского салона 14 с широкими окнами 6, например размером 4 х 6 футов, создает привлекательную возможность лучшего наблюдения с такого воздушного судна, которое обычно может лететь на высотах от 8000 до 12000 футов. Во фронтальном пандусе 3 также могут быть предусмотрены иллюминаторы 7, позволяющие производить наблюдение из нижнего салона 13.
Оболочка 41 охватывает ориентировочно от 18 до 85% длины фюзеляжа. Она образована множеством поперечных колец 43 и торсионных элементов 44, которые объединяют указанные кольца и создают конструкцию, имеющую геодезический внешний вид. Оболочковая конструкция 41 в результате ее образования из треугольников создает очень жесткую внутреннюю корпусную оболочку, которая оптимизирована для поглощения усилий скручивания ориентировочно в 100 раз лучше, чем классическая конструкция из колец и продольных балок типа Цеппелина. Для удобства конструирования эта оболочка 41 фюзеляжа 1 подразделена на сегменты 43' (фиг. 6D), каждый из которых содержит 3-4 кольца 43 с соответствующими торсионными элементами 44, образующими совместно сегмент фюзеляжа длиной 5-7, 5 м. При сборке 5-10 сегментов, в зависимости от размера фюзеляжа, обычно получают оболочку полностью. На оболочке 41 сверху полужестким образом закрепляют панели покрытия 42, создающие герметичную и аэродинамическую обшивку фюзеляжа 1.
Пространственная оболочковая рама 41 снабжена ребрами жесткости (не показаны) на своих концах, которые позволяют произвести крепление конусного переднего обтекателя 57 фюзеляжа и конусного заднего обтекателя 57' фюзеляжа. Обтекатели 57, 57' являются самоподдерживающимися, причем они изготовлены из тех же самых коробчатых пластинчатых элементов 54, что и нижняя оболочка фюзеляжа 30. На фиг. 6С показано, что эти элементы образованы из слоистых композитов, которые содержат кевлар, графит, сотопласт и комбинации кевлара. Указанные элементы облегчат модульное конструирование концевых обтекателей 57, 57'.
В относительно большом объеме верхнего внутреннего участка фюзеляжа 1 имеется значительное место для ввода туда по желанию статического подъемного газа, например гелия или горячего воздуха. Введение такого подъемного газа особенно полезно, если воздушное судно используется в режиме VTOL. Альтернативно или в дополнение, объемное оборудование, например оборудование радара с широкой апертурой, когда воздушное судно используется в качестве измерительной платформы, по желанию может быть установлено в этом пространстве.
Фюзеляж, в том числе оболочки 30, 41, покрытия 42 и обтекатели 57, 57', преимущественно поддерживаются в напряженном состоянии. Даже при нахождении на поверхности земли требуется некоторое остаточное избыточное внутреннее давление, например 1-1,5" WC, чтобы поддерживать планер и фюзеляж в этом преимущественно напряженном состоянии. Таким образом, для осуществления всех практических задач требуются герметичные закрытые снаружи конструкции 48, 48', которые отделяют салоны 13, 14 и двери 3, 5 от верхней внутренней части фюзеляжа. Закрытые конструкции 48, 48' могут быть изготовлены из гибкого мембранного материала или же из тонкого слоистого композитного материала, толщиной, например, от 1 до 3 мм, причем число слоев у этого материала меньше, чем у обычного образующего фюзеляж слоистого композита. Закрытые конструкции 48, 48' отодвинуты от салонов 13, 14 и поддерживаются килем, тенто-подобной рамой из балок 27 и тросами подвески 49.
Определение геометрии управления формой фюзеляжа
Обратимся теперь к рассмотрению фиг. 1, 2,
4А и 4В, на которых показано, что форма фюзеляжа 1 основана на простой и локально
симметричной геометрии, причем фюзеляж имеет главным образом эллиптическое поперечное сечение и идет на конус к носу
1' и корме 1''. Общий размер фюзеляжа 1, то есть его эквивалентная поверхность
крыльев, определяется расчетной подъемной силой воздушного судна в режимах R-VTOL или S-STOL, а также желанием отрыва от
земли на низких скоростях, обычно составляющих 90-135 км/час. Геометрия
фюзеляжа дополнительно обеспечивает малое лобовое сопротивление при крейсерском полете, например отношение подъемной силы к
сопротивлению может составлять от 8 до 12, при обеспечении силы тяги,
которая требуется в VTOL, и при средней крейсерской скорости, которая обычно составляет 300-370 км/час. Кроме того, геометрия
фюзеляжа облегчает образование широкой "воздушной подушки" с
симметричными картинами эффекта влияния близости земли, которая воздействует по центру тяжести воздушного судна и по аэродинамическому
центру фюзеляжа. Фюзеляж 1 имеет закругленную форму с
использованием внутреннего наддува для придания жесткости подъемному телу фюзеляжа, причем эта форма подходит для приводнения на водной
поверхности с минимальным лобовым сопротивлением, обычно
составляющим 25 см. Такая форма позволяет добиться низкой стоимости производства, а полуосевое симметричное поперечное сечение позволяет
использовать при изготовлении воздушного судна повторяющиеся
пластинчатые элементы, при этом необходимо малое число различных пресс-форм, обычно составляющее 40-60 единиц.
При описании геометрии фюзеляжа для удобства использованы следующие стандартные геометрические обозначения: осью x именуется горизонтальная ось, идущая по ширине воздушного судна; осью y именуется вертикальная ось; и осью z именуется ось, идущая по длине воздушного судна. Контур поперечного сечения фюзеляжа состоит из 2 меньших дуговых сегментов 30, 30' и 2 больших дуговых сегментов 31, 31', с тангенциальными концевыми состояниями. Углы α и β количественно задают расстояние поворота концов дуг 30, 30' от оси x.
Важно отметить, что поперечное сечение близко по форме к
эллиптическому, однако математически не соответствует
контуру эллипса. Размеры поперечного сечения фюзеляжа изменяются при изменении заданного значения "z" по оси z фюзеляжа. В соответствии с
известными законами геометрии соотношения между значениями
максимальной ширины фюзеляжа X (x) и максимальной высоты Y (x) в каждом поперечном сечении могут быть определены следующим образом:
Значение макс. ширины фюзеляжа равно X = (0, 5 •
x1 • R0max) + rn (x)
Значение верхней высоты фюзеляжа равно Y = (f) α , (x1
• R0max + rn (x)
Значение нижней высоты фюзеляжа равно Y' = (f) β , (x1 • R0max) + rn (x),
где x1 может иметь значения от 2 до 3,5; R0max
представляет собой выбранный максимальный диаметр исходного тела вращения; а rn (x) представляет собой дискретный радиус каждой
меньшей дуги 30, 30' в каждом сечении фюзеляжа n вдоль оси
z.
Поперечное сечение фюзеляжа представляет собой главным образом разрезанное пополам тело вращения, с исходным максимальным радиусом R0max 30 и с постоянным средним сечением 32, введенным между центрами двух дуг 30 и 30'. Выбор основного радиуса R0max определяет базовую максимальную высоту фюзеляжа. Выбранный радиус R0max при умножении на коэффициент x дает ширину постоянного среднего сечения 32 и, следовательно, дает коэффициент формы фюзеляжа. Дискретное значение x зависит главным образом от значения аэродинамической подъемной силы, которое должно выдерживаться фюзеляжем при желательной скорости отрыва от земли. Для достижения хороших полных весовых характеристик планера и высоких аэродинамических параметров постоянное среднее сечение 32 должно иметь значения между 2 • R0max, и 3,5 • R0max, что составляет в зависимости от коэффициента формы от 0,75 до 2,5.
Другой используемой переменной, которая изменяет геометрию поперечного сечения фюзеляжа, является выбор углов α и β дуг относительно оси x. Для улучшения аэродинамической подъемной силы подъемного тела фюзеляжа одного и того же размера могут быть использованы различные углы α и β. Для нижней части фюзеляжа наиболее приемлемыми являются углы β = 75-85o, в то время как для верхней части фюзеляжа предпочтительными являются углы α = 60-70o. Подобная геометрия позволяет фюзеляжу 1 иметь большую кривизну профиля на его верхней дуге 31, что создает большую аэродинамическую подъемную силу. Как известно, большая кривизна аэродинамической поверхности существенно увеличивает коэффициент подъемной силы для одной и той же площади поверхности крыла. Вместе с тем большая кривизна профиля верхнего фюзеляжа по сравнению с нижним облегчает получение более прочного (надежного) фюзеляжа за счет изготовления нижних элементов оболочковой рамы более изогнутыми и в результате менее склонными к тому, что именуется внезапным отказом. Это имеет особое значение в режимах эксплуатации при приложении напряжений изгиба, вызванных максимальными вертикальными порывами ветра, или в случае аварии системы наддува фюзеляжа.
Аналогично, что вытекает из предложенной геометрии, нижний угол β, равный 75-850o, позволяет нижней части фюзеляжа иметь менее выраженную кривизну 31', чем у верхней дуги 31. В результате получают главным образом плоскую донную поверхность фюзеляжа, которая облегчает использование эффекта близости земли за счет захватывания (улавливания) воздуха и создания повышенного давления под подъемным корпусом (телом) 1. Потенциально более слабая конструкция плоского нижнего фюзеляжа 31' усиливается за счет наличия массивного создающего жесткость киля 25 и ребер 50, 50', установленных вдоль средней нижней части фюзеляжа 1.
Как это показано на фиг. 2 и 4А, последовательность изменений поперечного сечения при типичной толщине сегментов фюзеляжа 1,5 - 3м образует обычно в их полной сборке форму полностью или наполовину симметричного аэродинамического профиля. Этот аэродинамический профиль с коротким (малым) коэффициентом формы может иметь отношения хорда-длина к хорде-толщина в диапазоне от 1:3,5 до 1:5, то есть 20-28% толщины хорды в виде сбоку. Такое воздушное судно с телом средней сплюснутости более эффективно противодействует структурным деформациям, вызванным моментами изгиба, воздействующими на фюзеляж в крейсерском полете.
При использовании описанного выше метода можно получить формы фюзеляжа с оптимальным отношением поверхности к объему и с хорошими аэродинамическими параметрами, одновременно имея отношения точности в диапазоне ориентировочно от 3 до 4,5.
Обратимся теперь к рассмотрению фиг. 4В, на которой показано, что каждая длина дуги 30, 30', 31, 31' может быть разделена на определенное число n дуговых сегментов, для получения оптимальной длины дуги 1 - 1,5 м, при этом длина фюзеляжа может быть разделена на сегменты размером 2,5 м. При использовании такой сегментации покрытие фюзеляжа может быть произведено при помощи панелей, имеющих только 2 или 3 изменения кривизны. Эта сегментация может быть также применена к кольцу 43 фюзеляжа и к торсионным элементам 44. Это позволяет добиться существенного снижения номенклатуры компонентов и стоимости сборки. Кроме того, для некоторых применений форма фюзеляжа 1 может быть сделана главным образом симметричной в носовой и хвостовой частях, что показано пунктиром 39 на фиг. 5В, при этом число различающихся по форме компонентов планера сокращается на 50%.
Подъемное тело
фюзеляжа
и построение трастеров с четырьмя несущими винтами
Обратимся теперь к рассмотрению фиг. 5А и 5В, на которой показано воздушное судно в режиме VTOL или в режиме зависания (парения);
судно
имеет симметричный фюзеляж и четыре пропеллера - несущих винта (в альтернативном варианте имеется более четырех генераторов тяги); 50% воздуха, который перемещается вниз всеми создающими скос
потока
вниз колоннами 35а, 35b, 35с, 35d, после столкновения с поверхностью земли отражается вверх под фюзеляж, как это показано на фиг. 5А стрелками. Все эти комбинированные с противоположным
направлением
вращения вихревые диски воздуха сталкиваются, как это показано позицией 36, под фюзеляжем и пересекаются под центом тяжести 38, который в основном совпадает с аэродинамическим центром.
При
столкновении вихрей они создают зону повышенного воздушного давления с тягой, направленной под углом 90o вверх, и создают опорную воздушную полушку 36'. Это создает фонтанный эффект.
При
надлежащем размещении пропеллеров - несущих винтов 23а, 23b, 23с, 23d и результирующих колонн скоса воздушного потока вниз 35а, 35b, 35с, 35d они действуют как "воздушные завесы" и загоняют воздух
под относительно широкий фюзеляж. Вращение в противоположном направлении пропеллеров 23а, 23d в носовой части и пропеллеров 23b, 23с в хвостовой части, а также слева и справа усиливает этот эффект и
является предпочтительным. При указанном вращении в противоположном направлении пропеллеров имеются только два зазора 37, 37', через которые может выходить воздух. Предпочтительной формой фюзеляжа 1
является форма с симметричным контуром 39 или форма, близкая к симметричному телу.
Проведенные эксперименты на 6 м модели, отображающей геометрию "НА" фюзеляж - несущий винт, подтвердили обоснованность выдвинутой концепции и дали детальные научные данные, позволяющие добиться улучшения подъемной силы. Было обнаружено, что в случае, когда расстояние от поверхности земли до нижней точки кривизны фюзеляжа равно диаметру пропеллера, может быть получена подъемная сила отрыва от земли за счет эффекта близости земли, равная 30% исходной силы тяги пропеллера. При более близких расстояниях от земли, например, когда расстояние от поверхности земли до нижней точки кривизны фюзеляжа равно 0,35 - 0,50 диаметра пропеллера, может быть получена еще большая подъемная сила отрыва от земли за счет эффекта близости, например до 36% от исходной силы тяги пропеллера. В частности, этот эффект возможен при нагрузке диска пропеллера более 80 кг/м2.
Геометрия,
позволяющая снизить до минимума вредное влияние фюзеляжа на вертикальную тягу пропеллера - несущего винта
Обратимся теперь к рассмотрению фиг. 2, на которой показано, что избежать
потерь
подъемной силы, вызванных воздухом, который проталкивается над фюзеляжем и поступает на пропеллер, особенно в случае расположения пропеллеров для обеспечения режима зависания воздушного судна
или
режима VTOL, можно при размещении несущих винтов снаружи от внешнего периметра фюзеляжа в виде сверху. В соответствии с предпочтительным вариантом настоящего изобретения, горизонтальная плоскость
вращения пропеллера находится главным образом у такого же вертикального положения, что и высота внешней кривизны фюзеляжа в соответствующих положениях по длине фюзеляжа. Результирующий воздушный
поток
является почти тангенциальным к плоскости пропеллера, в результате чего снижаются до минимума эффекты затягивания воздуха вниз, когда поступающий на пропеллеры воздух просасывается над
поверхностью
фюзеляжа. Показанный на фиг. 5В зазор C между внешними границами вращения пропеллера и внешним периметром фюзеляжа в виде сверху преимущественно должен составлять по меньшей мере 15-20%
диаметра
пропеллера.
Дифференциальная секция крыла фюзеляжа, диапазон наклона пропеллера
Подъемное тело планера 1 образует основную конструкцию рамы, к которой с внешней
стороны
присоединена система создания тяги. Обратимся теперь к рассмотрению фиг. 9А, 9В и 12А-12С, на которых показано, что пропеллеры - несущие винты большого диаметра 23а, 23d установлены в
концевых точках
консольных аутригеров 74а, 74d. Имеющие возможность наклона секции крыльев 20а, 20d установлены между фюзеляжем и пропеллерами - несущими винтами 23а, 23d. Центральная линия хорды 40
этих секций
крыльев может быть наклонена (повернута) независимо от наклона пропеллеров - несущих винтов. Преимущественно, секции крыльев установлены с возможностью поворота в диапазоне от - 10o до
130o относительно горизонтальной оси, при обычном положении в крейсерском полете 1- 5o, при положении в R-VTOL 40-75o и до 130o в некоторых
положениях
зависания. Ось несущего винта 24 обычно имеет возможность наклона в диапазоне от 0o до 110o относительно горизонтали, причем ось пропеллера в крейсерском полете
находится под
углом 0o, при зависании - под углом 90o, а в других режимах управления и отрыва от земли может находиться под различными другими углами. Обычно на практике имеется
дифференциальный угол до 23o между положением оси несущего винта и положением крыла.
За счет указанной возможности дифференциального наклона возникает множество преимуществ. В частности, имеются три преимущества, которые представляют собой существенное улучшение по сравнению с известной технологией обеспечения наклона несущего винта. Обратимся к рассмотрению фиг. 9А, на которой показана вертикально ориентированная секция крыла 20а', а штрих-пунктиром показана горизонтально ориентированная секция крыла 20а. Прежде всего, настоящее изобретение позволяет снизить потерю подъемной силы пилона в режиме VTOL и S- STOL. При вертикально ориентированной секции крыла 20а' в основном удается избежать блокировки спутной струи пропеллера, причем сопротивление скоса потока вниз на аутригере 74 крыла уменьшается ориентировочно до 1,5% потери подъемной силы VTOL, в то время как обычно имеют 8% потери подъемной силы VTOL при фиксированном, не имеющем наклона крыле, которое использовано в качестве пилона поддержки для наклоняемого пропеллера.
Угол поворота секции крыла может поддерживаться положительным над углом поворота пропеллера, при нахождении в режиме S-STOL и при переходе к крейсерскому режиму. В отличие от обычного воздушного судна с фиксированным крылом и имеющим возможность наклона несущим винтом, данное построение не только позволяет устранить потери тягового усилия подъема, но и увеличивает генерируемую аэродинамическую подъемную силу, или же может быть использовано для снижения подъемной силы при приземлении в режиме S-STOL. Кроме того, секции крыльев 20а, 20b, 20с, 20d в присутствии тяговой спутной струи пропеллера становятся секциями 20 с наддувом, что обеспечивает подъемную силу и управление при весьма малых скоростях, например менее 80 км/час. Это особенно важно для сохранения управления высотой в последние моменты процесса посадки. В результате получают улучшение аэродинамической подъемной силы в режиме S-STOL и в переходном полете, а также лучшие характеристики управления судном.
Кроме того (в-третьих), возможность независимого наклона четырех секций крыльев 20а, 20b, 20с, 20d позволяет осуществлять распределение требуемой аэродинамической подъемной силы между четырьмя крыльями в крейсерском полете. В зависимости от скорости и режима полета требуемая аэродинамическая подъемная сила для любой заданной точки диапазонов режима полета с удержанием воздушного судна в требуемом положении обеспечивается суммой подъемных сил, создаваемых подъемным корпусом (фюзеляжем) и четырьмя секциями крыльев. Так как подъемный корпус 1 имеет существенно меньший коэффициент формы, чем секции крыльев 20а, 20b, 20с, 20d, то в результате он создает большее лобовое сопротивление для определенной вырабатываемой аэродинамической подъемной силы. Поэтому предпочтительно разгружать подъемный корпус при крейсерских скоростях и получать от 4 секций крыльев дополнительную порцию аэродинамической подъемной силы. 4 секции крыльев 20а, 20b, 20с, 20d позволяют получать такую же величину аэродинамической подъемной силы с существенно меньшим лобовым сопротивлением, чем подъемный корпус 1, который сам несет 100% аэродинамической нагрузки.
Наддув жесткого фюзеляжа с гибко подвешенной наружной оболочкой
Обратимся теперь к рассмотрению фиг. 6А и 6В, на
которых показан фюзеляж в соответствии с настоящим изобретением, который состоит из жесткой самоподдерживающейся пространственной оболочковой рамы 41, вокруг которой полужестким образом навешены
полужесткие панели покрытия 42. Такой фюзеляж обладает возможностью сохранять общую геометрию поверхности даже при отсутствии внутреннего давления (наддува). Между оболочкой 41 и панелями 42 имеется
зазор 53, который обычно составляет 0,5 - 0,75 м. При создании внутреннего наддува оболочка 41 и панели 42 взаимодействуют с образованием легкого по весу жесткого резервуара под давлением, что
обеспечивает существенное увеличение по сравнению с аналогичной механической конструкцией без наддува (ориентировочно на 50-55%) стойкости к моменту изгиба и позволяет выбрать оптимальную технологию
изготовления рамы 41 для получения желательной аэродинамической формы поверхности фюзеляжа. Указанный механический подход позволяет получить фюзеляж, который назван авторами настоящего изобретения
"Нагруженной давлением оболочковой рамой" (PTSF).
Несмотря на то, что внутренний наддув представляет собой известный метод инженерного проектирования в механике для повышения жесткости резервуаров и широко используется в аэрокосмической промышленности, до настоящего времени не были получены конструкции, которые могут быть использованы на больших воздушных судах, летающих со средними и высокими скоростями. Обычно оболочка 41 представляет собой набор колец 43, установленных ортогонально z оси. В соответствии с предпочтительным вариантом настоящего изобретения, показанным на фиг. 12А, каждое из колец 43 образовано множеством трубок в виде многоугольника, имеющего от 12 до 18 угловых вершин 78 (на фиг. 12А показаны кольца с 18 вершинами). Каждое второе кольцо повернуто на 30o или 20o, в результате чего создается поперечное сечение рамы (в виде спереди), имеющее 24 - 36 рядов вершин 78. В соответствии с альтернативным вариантом, показанным на фиг. 6А и 6В, кольцо 43 и вершины 78 регулярно смещены относительно верхнего участка и боковых участков поперечного сечения внутреннего контура фюзеляжа, в то время как нижние секции колец 43' изменены для включения большего числа элементов, чтобы можно было присоединить конструктивные ребра.
Каждая вершина 78 совмещена для каждого второго кольца вдоль оси z с кривизной фюзеляжа. Кольца 43 и промежуточные торсионные балки 44 образуют решетку взаимно блокированных (зацепленных) треугольников, соединенных в завышенных узловых точках 45 у вершин, что обеспечивает некоторый объем глубины пространства для оболочковой структуры.
Обратимся теперь к рассмотрению фиг. 7А, 7В и 8А-8D, где показано, что каждый узел 45 главным образом имеет форму кольца с 6 отверстиями для ввода болтов 45', установленных изнутри кольцевого узла 45 и заходящих в резьбовые расточки, образованные в концевых конусах 43', 44' элементов 43, 44. Каждый из узлов 45 представляет собой соединение типа штифта и осуществляет соединение 6 трубчатых элементов оболочковой рамы 41. Перпендикулярно плоскости пересечения кольцевых трубчатых элементов 43 с узлом 45 в щель 62 преимущественно введена защелка 63, идущая поперек верхней стороны узла 45.
Защелка 63 удерживается в щели при помощи штифта 46 и является частью зажимного устройства 60, которое позволяет производить местный захват троса 58 и кончика "зазубренного" участка ребра 52, которое является полужестким и которое перекрывает зазор 53 между расположенной внутри жесткой пространственной оболочковой рамой 41 и полужестким наружным покрытием из панелей 42. Панели 42 имеют форму клиньев, идущих от носового обтекателя 57 до кормового обтекателя 57'. Направляющая троса/зажимное устройство 60 имеет обычно длину 0,65 м и высоту 0,15 м и содержит зажим 60', который зажимает два плоских элемента 60''. Плоские элементы 60'' связаны с ребром 52 и вводятся в зажим 60' в процессе сборки.
Для более полного понимания механики креплений внешних панелей покрытия 42 далее будут объяснены конструктивные и механические особенности построения внешних панелей покрытия 42, их соединение с продольными соединительными ребрами 52 и их механическая функция.
Внешние панели покрытия 42 изготовлены из легкого слоистого композитного материала. Слоистые материалы обеспечивают наибольшее отношение прочности к весу из всех известных в настоящее время материалов. По толщине от наружной к внутренней поверхности они содержат: очень тонкий слой, например 0,005 мм, износостойкой пленки (например, тедлара); слой трехосевой (тканной в трех направлениях) ткани с использованием полиарамидного волокна (например, кевлара); слой листового сердечника из сотопласта толщиной от 10 до 15 мм; еще один слой трехосевой ткани с использованием полиарамидного волокна; и последний внутренний слой герметичной для газа пленки, такой как металлизированная майларовая пленка (имеющаяся в продаже). Слои соединяют между собой адгезивом. Сердечник из сотопласта создает достаточную "плоскостную" жесткость полученного "бутерброда" против коробления и напряжений, возникающих при флаттере, которые могут прикладываться к внешней поверхности в крейсерском полете на скоростях около 360 км/час. Указанная панель конструкции обычно имеет вес около 0,45-0,65 кг/м2. Панель имеет эквивалентное сопротивление на разрыв, соответствующее алюминиевому листу толщиной 1,5 мм, при аналогичном весе панели. Панель обладает прочностью на растяжение, которая в несколько раз превосходит прочность на растяжение современных звукопоглощающих гибких структур Блимп (Blimp).
В соответствии с альтернативным вариантом настоящего изобретения внешние панели покрытия фюзеляжа изготовлены из двух листов гибкого материала, между которыми проложен лист сотопласта малой плотности. В другом альтернативном варианте, который показан на фиг. 8Е, два тонких листа гибкого материала 42, 42' использованы для образования как внешнего, так и внутреннего слоя покрытия. Между листами 42, 42' размещен пенопласт (вспененный материал) с закрытыми порами 28, имеющий малую плотность в диапазоне ориентировочно от 15 до 30 кг/м3. Пространство между гибкими листами до начала инжекции вспененного материала раздувается, поэтому листы действуют как пресс-форма, пока происходит отверждение инжектированного материала. Такое построение обеспечивает достаточную структурную жесткость для поддержания формы поперечного сечения фюзеляжа. В соответствии с еще одним вариантом, показанным на фиг. 8F, покрытие образовано двумя пространственными листами 42, 42' гибкого, имеющего высокую прочность на растяжение материала, а пространство 28' между листами подвергается наддуву изолированно от всего объема фюзеляжа при помощи независимых средств наддува. При этом более высокое внутреннее давление в этом пространстве увеличивает локально жесткость внешнего покрытия, не воздействуя на весь объем фюзеляжа.
Указанный ранее слоистый композит представляет собой предпочтительный материал для образования панелей 42. Для сборки всего покрытия фюзеляжа используют разрезные повторяющиеся панели 42', которые соответствуют геометрии, определяемой последовательностью вершин 78 вдоль периметра оболочки 41. Обратимся теперь к рассмотрению фиг. 8В, на которой показан стыковочный шов двух смежных панелей 42 и перпендикулярно выступающее "зазубренное" ребро 52. "Зазубренные" ребра обычно имеют отношение высоты к пролету в диапазоне ориентировочно от 0,20 : 1 до 0,25 : 1 и могут быть изготовлены из такого же материала, что и панели 42, или из других легких слоистых материалов. Для соединения ребра 52 с панелями 42 используется метод конструирования, при котором применяют интегрированную технологию соединения концов, являющуюся усовершенствованием техники изготовления с использованием нагрева и ультразвуковой сварки и позволяющую упростить процесс соединения отдельных узлов. Обратимся к фиг. 8В и 8D, на которых показано, что соединение двух панелей 42 с ребром 52 производят при помощи соединителя 64, который объединен с ребром 52 и в который вставляют расширенные концы 42а панелей 42. Концы 42а панелей расширены при помощи интегрированной концевой технологии. В частности, соединитель 64 образован из верхней секции 64а и из нужней секции 64b, которые соединены между собой при помощи средства крепления 2, такого как винт. Нижняя секция 64b надежно соединена с ребром 52. В секциях 64а и 64b образованы соответствующие канавки 64а' и 64b', так что при сборке секций между ними образуется канал, форма которого позволяет вставить в него и надежно удерживать конец панели 42а. В ходе сборки покрытия концы 42а панелей 42 вводят в канавки 64b', после чего сверху устанавливают секцию 64а, так что концы 42а также заходят в канавки 64а'. После этого при помощи винта 2 надежно соединяют секции 64а и 64b. При использовании соединителей 64 навешивание покрытия может производиться снаружи фюзеляжа. Преимущественно соединители 64 изготавливают экструзией из полиарамидов, таких как кевлар.
Для соединения ребер 52 с узлами 45 пространственной оболочки 41 верхний "зазубренный" участок ребра зажимают в зажимном устройстве 60. Образованная в устройстве 60 защелка 63 соответствует геометрии и расположению каждой из точек 45 узлового соединителя и щели 62. Трос 58 из кевлара вводят вдоль конца ребра 52. Этот трос 58 действует как основной элемент натяжения для передачи усилий растяжения поверхности фюзеляжа, создаваемых частично за счет внутреннего наддува фюзеляжа, на направляющую троса/зажимное устройство 60, которое, в свою очередь, передает все концентрированные усилия растяжения через защелку 63 на узел 45. После ввода в щель 62 узла 45 защелка 63 обладает возможностью некоторого поворота вбок относительно шпильки 46. Это создает некоторую гибкость отклонения вбок для полужесткого ребра 52 между внешними панелями 42 и жесткой рамой 41. Геометрия защелки 63 определяется степенью напряжений при внутреннем наддуве фюзеляжа, воздействующих на единицу площади покрытия. Дополнительные зажимные устройства 60 могут быть установлены вдоль кольцевых элементов между узлами 45, если есть желание дополнительно распределить нагрузку по раме. Вдоль верхнего участка каждого кольца 43 имеется ориентировочно 36 точек соединения ребер.
Внешнее покрытие образовано полным набором панелей 42, причем каждая продольная панель образована из 12 -24 клиньев. Указанные панели могут устанавливаться от верхней центральной линии фюзеляжа вниз к пересечению с нижней оболочкой 30. После того как вся поверхность фюзеляжа полностью перекрыта покрытием верхнего фюзеляжа, образованным панелями 42, нижней оболочкой 30, носовым обтекателем фюзеляжа 57 и хвостовым обтекателем фюзеляжа 57', может быть произведен внутренний наддув фюзеляжа. Средства наддува хорошо известны сами по себе (например, они применяются в звукопоглощающих и воздушных колпаках) и не требуют дополнительного пояснения. При небольшом превышении давления окружающей среды, например около 3-12 дюймов WC (3000 Па), панели внешнего покрытия 42 будут плотно натянуты. Геометрия фюзеляжа выбрана таким образом, что при создании внутреннего давления находящиеся в фюзеляже газы (воздух и/или подъемный газ) создают однородное перпендикулярное к поверхности давление по всему фюзеляжу и воздействуют на панели 42 радиально наружу. Поверхностная плоскостная нагрузка растяжения, воздействующая на каждую из панелей 42, передается на ребра 52. Это растягивающее усилие затем передается через направляющую троса/зажимное устройство 60 к защелке 63 и к узлу 45. Это создает напряжения в нижних элементах 43, 44 конструкции оболочковой рамы. Дугообразная форма ребер 52 между двумя смежными узлами 45 способствует распределению накопленной растягивающей нагрузки между двумя кольцами 43.
Обратимся теперь к рассмотрению фиг. 6В и 7А, на которых показано, что по меньшей мере некоторые узлы 45 оболочковой формы содержат стержни 51 с проушинами для троса 51' вблизи от штифтов 46. Стержни 51 расположены свободно и могут идти под углами, позволяющими им сопрягаться с килем 25. Так, например, из центральной точки внутри узла 45, к проушине 51' концевого стержня 51 идет натяжной трос 47, который далее идет к верхнему правому 25а и левому 25b углам киля 25, в том месте, которое соответствует положению кольца 43, на котором локализован узел 45. Эти сети тросов 47 противодействуют напряжениям в кольцах (обручах), создаваемым внутренним давлением и удерживаемым за счет поверхностного натяжения; они также распределяют некоторые из сил, создаваемых концентрированной коммерческой нагрузкой, размещенной в нижнем ангаре 13 и в верхнем салоне 14, по конструкции киля 25 и по оболочке 41. Кроме того, натяжные тросы 47 придают конструкции оболочковой рамы 41 стабильность в отсутствии внутреннего давления.
Применение детального инженерного анализа, в том числе техники конечных элементов и имитации вертикального порыва ветра, создающего усилия, воздействующие на фюзеляж воздушного судна в крейсерском полете, показало, что комбинация описанных ранее панелей покрытия 42, ребер 52 и оболочковых элементов 43, 44, 45 остается главным образом в состоянии предварительного напряжения за счет наличия внутреннего наддува в широком диапазоне операционных скоростей судна, например, ориентировочно до крейсерской скорости 360 км/час. Только в том случае, когда при таких скоростях полета встречаются сильные порывы ветра, достигающие скорости свыше 60 футов/сек, некоторые из соединенных с килем элементов получают сжатие. Характерная напряженная природа элементов оболочки 41 при полете на типичных крейсерских скоростях обеспечивает высокое отношение веса к прочности фюзеляжа. Как известно, компоненты, изготовленные из таких материалов, как кевлар или графит (углерод), выдерживают во много раз большую нагрузку на растяжение, чем на сжатие. Поэтому за счет применения описанной технологии конструирования можно получить усредненный удельный вес поверхностной сборки порядка 2,2 -2,5 кг на м2. В результате получают легкую конструкцию планера, имеющую пустые весовые фракции от 0,45 до 0,5 при максимальном взлетном весе воздушного судна 40 тонн. При аварии наддува, за счет применения элементов 43, 44 пространственной рамы с местной стойкостью против коробления, которые имеют обычно диаметр балки 8-12 см и толщину стенки 0,5 - 2 мм, если использован сплав алюминия, может быть полностью сохранена целостность формы и конструктивная целостность подъемного тела фюзеляжа при крейсерских скоростях 110 - 125 узлов и воздействии момента вертикального порыва ветра 60 футов/сек. Это позволяет воздушному судну вернуться на базу даже в условиях плохой погоды.
Несущий
нагрузку интегрированный аутригер с наклоняемой секцией крыла
Обратимся теперь к
рассмотрению фиг. 12А - 12С. В связи с тем, что компонент вертикальной статической подъемной силы в небольшом
"НА" не играет роли или играет незначительную роль в балансе подъемных сил в режиме VTOL,
весьма существенная часть силы (обычно 10 - 20 тонн) и вибраций воздействует на аутригеры 74. Конструкция
каждого аутригера 74 должна быть достаточно жесткой для того, чтобы выдерживать воздействие
приложенных сил, и вместе с тем должна быть относительно легкой.
Внутренние несущие сквозные балки 26 (показана только одна балка) преимущественно изготовлены в виде обычных модульных раскосов (ферм) из труб большого диаметра. Балки 26 сопряжены с килем 25 и рамой 41 при помощи множества натяжных тросов 73, которые соединяют балки 26, 26' с оболочкой 41, в то время как жесткие трубчатые элементы 72 соединяют киль 25 с балками 26, 26', в результате чего получают балку 26, имеющую хорошую (надежную) опору. Концы 71 балки 26 непосредственно стыкуются с оболочкой 41 и создают очень жесткую местную решетку балок, которая может действовать как "жесткая точка" 76 для поддержки аутригеров 74b, 74с. Некоторые из балочных элементов решетки 76 обеспечивают тангенциальное распределение моментов между элементами 43, 44 конструкции пространственной оболочки фюзеляжа, что особенно желательно для поглощения действующих " в плоскости" усилий. Жесткая точка 76 обладает достаточной жесткостью против момента изгиба как в ее вертикальной, так и в горизонтальной плоскостях, что позволяет выдерживать тяговые усилия несущего винта, которые действуют в обоих направлениях в этой точке.
Внешние аутригеры 74 могут быть изготовлены из квадратной фермы, что показано на чертежах, или из трубы. Максимальная высота и ширина аутригера 74 ограничена геометрией внутренней максимальной высоты хорды секций крыльев 20 аэродинамического профиля. Обычно аутригер 74 имеет диаметр от 0,8 м до 1,8 м. Конкретный диаметр выбирают с учетом размера секции крыла 20, требуемой тяги и размеров пропеллера.
Каждая секция крыла 20 может быть повернута дифференциально от оси пропеллера, однако очень часто она наклонена на тот же угол, что и собственно (сама) ось пропеллера, поэтому воздействующие на край аутригера 74 тяговые усилия и результирующие моменты изгиба часто приложены последовательно с положением (по оси) секции крыла. Углы могут изменяться при VTOL зависании и в режиме полета S-STOL до максимального значения, ориентировочно 18-22o. При этом вектор силы, воздействующий на аутригер, является таким же, что и вектор тяги, который представляет собой самую большую воздействующую на конструкцию нагрузку. Секция крыла преимущественно представляет собой интегральную часть указанной конструкции. При ориентировочном совмещении с осью тяги секция крыла обеспечивает намного больший момент инерции в плоскости ее длины хорды, чем собственно балка аутригера.
Секция крыла 20 спроектирована в виде коробчатого жесткого крыла с ребрами жесткости 66, панелями 77, идущими между ребрами 66, и композитным слоистым поверхностным покрытием 68. Секция крыла имеет высокий момент инерции в поперечном сечении вдоль ее длины. Как момент инерции аутригера 74, так и момент инерции секции крыла 20 суммируются для положения того угла, на который секция крыла повернута в данный момент. Это существенно повышает жесткость для заданного конструктивного веса. При взаимодействии компонентов крыла 20 и аутригера 74 повышается индивидуальная стойкость к воздействию момента изгиба по сравнению со случаем изолированного воздействия нагрузки. Ребра 66 крыла установлены на подшипниках поверхностного типа 69, оптимизированных к воздействию скручивающих усилий. Для уменьшения веса подшипники 69 могут быть изготовлены из композитных материалов или же могут быть изготовлены из обычных подшипниковых материалов, например из стали.
При использовании указанной геометрии аутригера и крыла, в режиме полета VTOL, когда секции крыльев 20 находятся в вертикальном положении, при определенных условиях они действуют как генераторы момента управления, что обеспечивается соответствующей жесткостью аутригеров. Аналогично, в прямом полете, когда секции крыльев 20 действуют как обычный аэродинамический профиль для создания аэродинамической подъемной силы, имеется достаточная жесткость аутригера, позволяющая альтернативно выдерживать как тяговые усилия, так и аэродинамическую подъемную силу, воздействующую на секции крыльев 20 и на аутригер в зависимости от режима полета и от распределения аэродинамической подъемной нагрузки.
Интегрированная система
управления для приведения в движение в режиме VTOL и для создания тяги при зивисании
Воздушное
судно в соответствии с настоящим изобретением позволяет обеспечивать точное зависание и
удержание положения судна в 80% всех превалирующих скоростей ветра. Система управления включает в себя
аппаратные и программные средства, обеспечивающие в сочетании управление приведением в движение
судна и управление вектором силы, причем указанная система позволяет быстро производить изменения
вектора тяги для достижения хорошего управления положением судна. Небольшие изменения вектора могут
быть выданы в течение доли секунды, а большие изменения вектора могут быть выданы в течение 0,5-1,5
сек.
Имеющиеся в продаже пропеллеры - несущие винты большого диаметра с возможностью наклона обычно имеют скорость наклона, ограниченную величинами 0,7-1,5o/сек, чтобы избежать чрезмерных напряжении, возникающих за счет момента инерции гироскопических сил. Если принимать во внимание эффект порывов ветра на острой кромке или изменения направления ветра, которые могут происходить в течение ориентировочно 0,5 -1 сек, то становится понятно, что наклон только пропеллеров 24 не позволяет получать требуемые моменты рыскания, необходимые для удержания фюзеляжа в предтурбулентном положении в таких условиях полета. Это особенно касается случая удержания судна точно над целью на земле при зависании.
В данном случае установка секций крыльев с возможностью наклона позволяет обеспечить дополнительную функцию, а именно позволяет осуществлять быстрый поворот относительно нейтральной оси со скоростью до 22o/сек. Обратимся теперь к рассмотрению фиг. 1, 9А и 9В, на которых показано, что сразу же при начале поворота воздушного судна по оси y, бортовая измерительная система на базе компьютера производит измерение ускорения и определяет усилия, необходимые для прекращения или замедления вредного поворота. В течение ориентировочно 0, 2 сек около 6-7% тяги, вырабатываемой пропеллерами 23а, 23b, 23с и 23d, может быть получено в виде момента рыскания, за счет комбинации положительных и отрицательных подъемных сил, воздействующих почти перпендикулярно на наклонные секции крыльев 20а, 20b, 20с и 20d, которые имеют возможность наклона вперед (или, соответственно, назад) на угол до 22o относительно вертикального положения, в противоположных направлениях с левой и правой сторон воздушного судна.
Указанная немедленная активизация момента рыскания будет либо предотвращать начало поворота по оси у при пертурбациях (возмущениях) ориентировочно до 20 килоузлов, и/или существенно снижать скорости вращения (поворота) по этой оси, пока более медленно наклоняющиеся пропеллеры не достигнут угла наклона 2-3o относительно вертикали в течение ориентировочно 1,5-2 сек, также при дифференциальном наклоне вперед или назад с каждой стороны фюзеляжа, после начала столкновения возмущающего волнового фронта, порыва или поворота ветра с воздушным судном. Применение стандартной косинусной функции угла наклона несущего винта, которая определяет горизонтальный вектор тяги, имеющийся по оси x в вертикально действующем трасторе (средстве создания тяги) для заданной величины имеющейся вертикальной тяги, дает следующую картину: при наклоне 3o пропеллера - несущего винта, в дополнение к векторам, уже создаваемым немедленным наклоном секций крыла, имеется 5,2 % вектора вертикальной тяги. Процентное содержание каждого из двух добавленных векторов управления, создаваемых субсистемами 20а, 20b, 20с и 20d и 23а, 23b, 23с и 23d, достаточно для создания мощных комбинированных моментов рыскания. Из области управления современными вертолетами известно, что обычно 10-12% полной тяги следует резервировать для обеспечения хорошей управляемости машины. Было показано, что аналогичные резервы достижимы для гибридного воздушного судна "НА", например, около 7% от секций крыльев, плюс 5% от несущих винтов. Кроме того, следует иметь в виду, что в случае обычного коммерческого "НА" с размахом крыльев около 35-40 м, имеющийся вектор тяги будет приложен к концу очень длинного плеча длиной до 20 м. Это позволяет создавать очень мощные моменты управления для обратного разворота воздушного судна для совмещения с основным направлением ветра.
В том случае, когда пропеллеры - несущие винты 23а, 23b, 23с и 23d имеют дифференциальные углы наклона в носовой и кормовой части, составляющие ≥ 3o от вертикали, до 5% компонента вертикальной тяги может быть использовано для получения моментов при "рыскании", только за счет наклона собственно пропеллера. При больших углах наклона пропеллера относительно вертикали секции крыльев 20а, 20b, 20с и 20d продолжают вырабатывать указанные выше моменты, так как они могут поворачиваться параллельно с увеличением поворота оси пропеллер - несущий винт. Относительный вектор скоса потока вниз над секциями крыльев остается неизменным. Для стандартного "НА" коммерческого размера, имеющего силу тяги около 40000 килофунтов, при комбинированном наклоне крыла и оси тяги можно получить момент управления по оси у, превышающий 225000 метров-кг, что соответствует моментам возмущения (пертурбации) порывами ветра ориентировочно до 54 ктонн (при скорости ветра 28 м/сек, или 93 фута в секунду), воздействующим на фюзеляж. Это близко к предельным порывам ветра, на которые производят расчет современного воздушного судна для обеспечения его безопасного полета. Это также соответствует наиболее точной характеристике зависания современных вертолетов и достаточно для обеспечения 85% "станционного времени", что обычно желательно для осуществления коммерческих операций.
Режимы управления полетом и связанные с этим
элементы управления
В Таблице 1 приведены систематические симметричные "половинные" и "дифференциальные" комбинации и вариации
величин векторов тяги пропеллера, векторов оси ротора и
векторов отрицательной и положительной аэродинамической подъемной силы секции крыла в двух основных режимах полета, подлежащих управлению: при
зависании и в крейсерском полете. После Таблицы 1
приведено описание компонентов, задействованных в соответствии с требованиями контроля положения судна.
В Таблице 1 представлены в табличной форме элементы, задействованные при управлении положением воздушного судна в полете (см. в конце описания).
Режим полета VTOL и зависание
Управление положением
воздушного судна и выработка моментов тангажа и
крена по оси z и x осуществляется за счет дифференциальных коллективных изменений тяги несущих винтов со стороны на сторону судна и с носа на корму.
Основной момент рыскания для поворота относительно
"y оси" вырабатывается за счет наклона правых боковых пропеллеров назад до максимального угла 10o (от вертикали) и за счет наклона левых
боковых пропеллеров на такой же угол вперед. При
создании момента рыскания для управления зависанием участвуют дополнительно секции крыльев, как это было подробно описано ранее. Режим поступательного
перемещения вперед на малой скорости достигается
за счет коллективного наклона вперед всех четырех пропеллеров, обычно на 2-5o. Аналогичным образом, поступательные перемещения назад
достигаются за счет коллективного наклона назад всех
четырех пропеллеров или всех четырех секций крыльев. В случае поступательного перемещения назад, наклон пропеллера преимущественно должен быть
ограничен максимальным углом 10o назад.
Поступательное перемещение вбок обеспечивается введением прежде всего момента крена с дифференциальной тягой между левым и правым несущими винтами, с последующим удержанием коллективной тяги в той же самой пропорции. Среди других решений можно указать добавочные циклы вбок только по одной оси или установку других средств, таких как вентиляторные трастеры (вентиляторные средства создания тяги) (не показаны) в носовом и кормовом обтекателях, перпендикулярно к центральной линии фюзеляжа; указанным образом можно создавать движения поступательного перемещения вбок без крена. В соответствии с другим вариантом настоящего изобретения на гондолах двигателя 21 устанавливают вертикальные стабилизаторы 88, 88' (фиг. 9С). При нахождении оси 24 пропеллера в вертикальном положении интегрированные в стабилизаторы 88, 88' щитки руля 89, 89' коллективно смещаются влево или вправо, что вызывает отклонение спутной струи пропеллера и в результате обеспечивает поступательное перемещение в "x оси" без угла крена.
Режимы полета R-VTOL или S-STOL
В режиме S-STOL четыре пропеллера наклоняются в
положение 70-75o от горизонтали для
сохранения предпочтительного эффекта наземной воздушной полушки и для оптимизации векторов ускорения подъема и движения вперед. Четыре секции крыльев
наклоняются на угол, который ориентировочно на
15o больше наклона их соответствующих осей пропеллеров. Это обеспечивает создание весьма эффективно действующих поверхностей управления "с
продувом", над которыми ускоряется воздушный
поток пропеллеров, в результате чего секции крыльев могут обеспечивать момент управления тангажом и креном в режиме S-STOL, даже при весьма малых скоростях
полета от 80 до 110 км/час (45-60
килоузлов), когда аэродинамические поверхности управления обычно теряют эффективность в результате нехватки воздушного давления, которое почти не воздействует на них
при очень низких скоростях.
Управлением по курсу полета (управление рысканием) обеспечивается дифференциальной тягой между правыми и левыми пропеллерами.
В соответствии с опционным вариантом настоящего изобретения могут быть использованы вертикальные стабилизаторы 88, 88' (фиг. 9С), имеющие рули 89, 89', создающие вариант руля с продувом. Этот вариант позволяет обеспечить управлением по курсу полета (управление рысканием), которое применяется в обычных воздушных судах. Конфигурацию стабилизатор - руль можно считать надежной, но не предпочтительной по конструктивным соображениям и при применении передового компьютерного управления стабильностью.
Переходный режим полета (только из VTOL или зависания)
Начиная от режима полета VTOL или
зависания, при угле
около 90o пропеллера от горизонтали, вектор тяги может быть повернут за счет медленного наклона четырех пропеллеров коллективно вперед. Направленный вперед по x оси
компонент этого вектора
ускоряет воздушное судно вперед. Это приводит к увеличению скорости движения вперед и к выработке аэродинамической подъемной силы при помощи подъемного тела фюзеляжа и четырех
секций крыльев. Это
приводит к началу уменьшения значения требуемого тягового подъемного усилия и позволяет дополнительно отклонить назад к горизонтали ось пропеллера. В процессе наклона эффективность
выработки
связанного с осью вектора управления изменяется в соответствии с основными законами геометрии. Полное завершение переходного режима обеспечивается обычно при скоростях ≥ 165 км/час
(90
килоузлов).
Режим крейсерского полета
В крейсерском полете управление тангажом обеспечивается за счет дифференциального наклона одной из пар секций крыльев, например
левой и
правой секций крыльев, ближайших к носу, и другой хвостовой пары. Управление креном и поворот координат могут быть обеспечены за счет дифференциального наклона секций крыльев с каждой из
сторон
фюзеляжа и за счет дифференциальной тяги пропеллеров с левой и правой сторон. Балансировка в крейсерском полете обеспечивается за счет дифференциального заполнения топливных баков в носовой и
кормовой части воздушного судна относительно центра тяжести (не показано). Дифференциальная стабильность обеспечивается за счет дифференциальных вариаций тяги левой и правой пары пропеллеров; в
альтернативном варианте для этого дополнительно может быть использовано отклонение стабилизатора 88, установленного на щитке руля 89.
Основная концепция управления полетом и
навигации
Концепция управления воздушным судном основана на концепции активного компьютерного приращения стабильности. На фиг. 10 показана блок-схема основных компонентов системы управления
полетом, аппаратные средства которой описаны ниже. Основная концепция управления включает в себя следующие элементы управления:
Средства управления:
4 вариации шага воздушного винта
(пропеллера), регулировка тяги
4 вариации наклона оси пропеллера
4 вариации угла наклона секций крыльев
4 вариации рулей, установленных в спутной струе пропеллера
(необязательно)
Доступные пилоту средства управления:
1 ручка управления креном и тангажом, которая позволяет облегчить управление в режиме VTOL и при зависании, и обеспечивает
поступательное перемещение судна в боковом направлении и локальные перемещения вперед и назад.
1 установленная на ручке управления кнопка для коллективного наклона осей
пропеллеров
1 кнопка для коллективного изменения тяги
1 педаль для путевого управления полета.
Смесители:
5 входных переменных для пилота, которые должны
быть
преобразованы в определенный сигнал управления исполнительным механизмом; должны быть заданы для каждого из имеющихся 12 или 16 средств управления.
Исполнительные механизмы:
В связи с относительно большими временными периодами циклов воздушного судна могут быть использованы исполнительные механизмы с приводом от электродвигателей. Это позволяет отказаться от
гидравлики,
которая требует больших усилий по ее техническому обслуживанию.
Кабина экипажа размещение системы управления полетом
Обратимся теперь к рассмотрению фиг. 2, на
которой
показана кабина 17, размещенная в лицевой части носового обтекателя 57 фюзеляжа 1. Может быть использовано любое размещение оборудования в кабине и любые средства сопряжения пилота (с
оборудованием),
например, такие, которые недавно разработаны фирмой Боинг-Белл и применены в машине V-22 Osprey.
Обратимся теперь к рассмотрению фиг. 10, 12 и 16, на которых показаны перечисленные выше элементы, управление которыми осуществляется при помощи электрических исполнительных механизмов; в эту схему заложены двойная избыточность. Управление взаимодействием всех элементов координируется при помощи компьютера 80. Системный подход обычно основан на концепциях управления с использованием на борту проводного или волоконного монтажа. Компьютер 80, с которым соединены все компоненты проводной системы, находится в кабине экипажа.
Центральным элементом (сердцем) системы является трехосевой лазерный гироскоп 83, предназначенный для измерения углов вращения (поворота) относительно осей x, y и z, сопряженный с компьютером 80, который осуществляет непрерывный текущий контроль изменений положения воздушного судна. Обеспечиваются функции автопилота с обычной возможностью вмешательства по желанию в управление пилота. Функции автопилота предварительно запрограммированы для автоматического поддержания некоторых рекуррентных режимов полета, которые соответствуют различным операционным рутинным требованиям. Кроме того, система управления главным образом основана на принципах "Определенной скорости изменения управления" (RCC), в соответствии с которыми лазерный гироскоп 83 выдает данные с учетом скорости изменений относительного перемещения по осям x, y и z пространственной системы координат. Пилот при помощи ручки управления и других средств сопряжения с оборудованием судна имеет возможность установить желательные значения скоростей изменения различных параметров управления воздушным судном, подлежащих изменению и/или поддержанию в любой момент времени. Стандартные подпрограммы 85 компьютера создают "законы управления", в соответствии с которыми производится обработка предварительно запрограммированных уравнений, описывающих движения воздушного судна, и обеспечивают набор данных для смесителей 86, которые выдают дискретные сигналы 87а, 87b, 87с и 87d на комбинацию исполнительных механизмов, позволяющих обеспечить желательные условия управления полетом.
Система управления полетом преимущественно включает в себя бортовые оптические датчики 82, которые выдают на компьютер данные, касающиеся поступательного перемещения воздушного судна в непосредственной близости от поверхности земли. Для оценки превалирующих атмосферных условий используются обычные датчики 84, которые выдают данные на компьютер 80.
Современная "твердотельная" технология построения лазерного гироскопа позволяет также контролировать непрерывно перемещающуюся опорную точку, например действительное положение воздушного судна в любой момент времени, или же самое последнее изменение положения воздушного судна на трассе полета. Альтернативно, бортовая глобальная система местоопределения 81 может выдавать информацию относительно положения воздушного судна в реальном масштабе времени. Указанные сложные технологии управления недавно стали доступны в виде имеющихся в продаже систем с умеренной стоимостью, обычно в твердотельном исполнении, обеспечивающем высокую надежность и требующем незначительного технического обслуживания, если сравнивать с более ранними моделями, в которых использовалась комбинация вращающихся электрических и механических узлов.
На фиг. 10 показана передовая система управления полетом без применения механических средств связи. В упомянутой выше волоконной системе управления используется такой же системный подход, что и в проводной. Однако использование оптических волокон для передачи данных от центрального процессора управления к местным процессорам и исполнительным механизмам обеспечивает выигрыш по физическому размеру (объему) и повышение надежности при воздействии мощных магнитных полей, например, при использовании воздушного судна для инспекции высоковольтных линий электропередачи.
Система управления является полностью цифровой и имеет трехкратную или четырехкратную избыточность. Такая система также содержит передовой "режим обучения", который позволяет компьютеру системы "выучивать" и "запоминать" определенные ответы при воздействии порыва ветра, эффекта близости земли и турбулентности.
Для облегчения полетных операций, особенно в случае минимальной наземной инфраструктуры поддержки, в шасси встроены ячейки контроля нагрузки. Эти ячейки нагрузки обеспечивают автоматическое обновление данных относительно сдвигов центра тяжести в результате быстрого изменения ситуаций загрузки и разгрузки воздушного судна. Эти данные обеспечивают быстрое и гибкое изменение коммерческих нагрузок при минимальном наблюдении со стороны экипажа или прораба по загрузке.
Системы привода
На судне в соответствии
с настоящим изобретением
преимущественно используют две системы привода. Первая система привода включает в себя обычные основные компоненты трансмиссии. В нее входит обычная газовая осевая турбина с
принадлежностями, редуктор,
муфта и компоненты для "симплексной" поперечной передачи на каждую пару пропеллеров в носовой и кормовой части судна. Валы 19, 19' (фиг. 3) позволяют передавать около 50%
тяговой мощности от любого
из двух носового и кормового двигателей, а также к противоположно размещенному пропеллеру в случае аварии любого из двигателей. Валы 19, 19' поддерживаются при помощи
несущих сквозных конструкций 26,
26'. Такое построение является достаточно традиционным и не требует дополнительного пояснения.
Второй предпочтительной системой привода является турбоэлектрическая система привода (TEDS). В течение последних 10 лет достигнут очень существенный прогресс в создании электродвигателей малого веса и новых приводных технологий. Применение бесщеточных электродвигателей с постоянными магнитами и технологии высокоскоростных генераторов мощности в сочетании с полупроводниками (тиристорами), используемыми для переключения высоких напряжений и токов, привело к существенному расширению функциональных возможностей и к резкому снижению стоимости. В отличие от обычных электродвигателей указанные приводные блоки способны иметь скорости вращения в диапазоне от 10000 до 40000 об/мин. Турбоэлектрические приводы имеют весовые алгоритмы 0,2-0,25 кг/кВт на вал для электродвигателя, и уровень около 0,10- 0,15 кг/кВт для выходной мощности генератора переменного тока в диапазоне ≥ 1000 кВт. Несмотря на известность систем TEDS, они не использовались ранее в качестве первичных систем привода воздушного судна. По ряду важных инженерных и оперативных причин применение таких систем TEDS полезно в качестве альтернативного системного подхода для гибридного воздушного судна "НА" в соответствии с настоящим изобретением.
Построение TEDS показано на блок-схеме фиг. 11. Система включает в себя обычную (сертифицированную для воздушного судна) газовую турбину 90, 90' с резервированием, высокоскоростные, имеющие высокую плотность генераторы переменного тока 93 с резервированием, каждый из которых непосредственно подключен через редуктор 92, 92' (оптимизирующий скорость вращения (об/мин) генератора переменного тока) к электрическому блоку управления мощностью 91, 91'. Система передачи высоковольтной мощности 96 с резервированием осуществляет передачу мощности на четыре бесщеточных двигателя 99а, 99b, 99с, 99d с постоянными магнитами и на редукторы 95а, 95b, 95с, 95d, для привода при постоянных об/мин пропеллеров с переменным шагом 23а, 23b, 23с и 23d. Эта система преимущественно имеет регуляторы инжекции электронного питания (топлива), управление которыми производится от центрального полетного компьютера 80. Газотурбинные двигатели 90, 90' и генераторы переменного тока 93, 93' преимущественно установлены в двигательном отсеке 104 на корме "НА". Двигательный отсек преимущественно имеет возможность доступа из фюзеляжа в полете, что позволяет производить ремонт и модификации во время полета.
Осевая (одновальная) газовая турбина 90 является первичным двигателем для высокоскоростного генератора переменного тока 93. Этот привод с постоянной скоростью, выполненный в виде генератора переменного тока с прямым подключением вала, может вращаться со скоростью ≥ 10000 об/мин.
Блоки управления мощностью 91, 91' содержат набор тиристоров для мгновенного переключения токов, формы колебаний и выходных напряжений. Управление этими блоками производится компьютером, на вход которого поступают сигналы управления от полетного компьютера 80. Сигналы управления должны распределяться на различные исполнительные механизмы для осуществления уставок мощности в ответ на вводы пилота.
На уровне пользователя мощностью генераторы переменного тока 93, 93' подают энергию, модулированную блоками 91, 91', на четыре бесщеточных двигателя 99а, 99b, 99с, 99d с постоянными магнитами. Ведущие валы этих двигателей вращаются со скоростью в диапазоне около 10000 - 12000 об/мин. Обороты двигателей снижают при помощи обычных двухступенчатых редукторов 95а, 95b, 95с и 95d до уровней, соответствующих скорости конца пропеллера для оптимизированного размера пропеллера. Высоковольтные силовые линии 96 идут из двигательного отсека 104 к четырем двигателям (пропеллеров). Обмотки приводных двигателей могут быть выполнены в виде двух отдельных секций, что позволяет иметь 50 % резервирование по мощности в случае аварии одной из обмоток.
Использованы пропеллеры с постоянной скоростью вращения (об/мин). Для поддержания постоянной скорости вращения пропеллера, когда при изменении подъемной силы/управления требуется изменение шага лопаток для обеспечения большей или меньшей тяги, регулятор электронного питания производит инжекцию определенного объема питания в турбину, который соответствует сигналу нагрузки, вырабатываемому полетным компьютером. Системы, в которых использованы пропеллеры с постоянной скоростью вращения и регуляторы электронного питания, выполнены в соответствии с хорошо отработанной технологией.
Расположение силовой установки внутри фюзеляжа дает возможность нагрева подъемного газа или воздуха внутри фюзеляжа. Установка газовых турбин внутри фюзеляжа таким образом, что часть выделяемого ими тепла отводится ранее выхода отработанных газов с кормы воздушного судна, позволяет использовать достаточно практичные теплообменники, установленные на корме; в этом случае используется технология "супернагрева", которая намного проще традиционной технологии, в соответствии с которой отходящая теплота должна транспортироваться по трубам от расположенной снаружи турбины к теплообменникам, расположенным внутри фюзеляжа. Использование наиболее простых средств теплообмена и канализации теплоты расширяет возможности нагрева газа внутри фюзеляжа, что, по желанию, может увеличивать подъемную силу в режиме VTOL.
Альтернативное построение НА, имеющего последовательные подъемные
вентиляторы VTOL с встроенной кормовой системой тяги
Альтернативное
построение воздушного судна в соответствии с настоящим изобретением показано на фиг. 13А - 13D. Это воздушное судно названо
передовым воздушным судном ("AHA"). В этом построении имеются отличия в
устройстве элементов создания тяги и управления от обсуждавшихся ранее элементов.
Фюзеляж в целом "AHA" выполнен в виде подъемного тела фюзеляжа с малым или средним коэффициентом формы, например AR=1-3, при отношениях сплюснутости 1:4-1:6, с симметричным корпусом для оптимизации эффекта влияния близости земли. По желанию фюзеляж может быть заполнен подъемным газом, который обеспечивает до 15% его максимальной взлетной массы за счет статической подъемной силы. Общие проектные соображения для такого воздушного судна соответствуют основным принципам, изложенным ранее для предпочтительного варианта с четырьмя несущими винтами.
Подъемное тело фюзеляжа 105 имеет множество поворотных штыревых секций крыльев 106а, 106b, 106с, 106d, которые установлены на нем тандемом (последовательно), в носовой и кормовой части судна относительно центра тяжести 124. Крылья 106а - d обеспечивают управление тангажом и координированно поворачиваются в крейсерском полете и в полете на малых скоростях. На концах штыревых секций крыльев 106а, 106b, 106с, 106d установлены вертикальные стабилизаторы 115а, 115b, 115с, 115d с встроенными в них (интегральными) рулевыми щитками 116а, 116b, 116с, 116d, которые используются для управления по курсу в крейсерском полете. Штыревые секции крыльев установлены с возможностью поворота относительно их точек нейтрального аэродинамического давления, с углами поворота от 0o (нейтраль) до 25o.
Вдоль среднего участка фюзеляжа, имеющего максимальный диаметр, установлено множество вентиляторов 108а - 108g и 108а' - 108g'. Обычно 2 - 4 вентилятора устанавливают в носовой и кормовой части, а также справа и слева от центра тяжести 124. Вентиляторы установлены на горизонтальных фланцах 107 и 107', которые выступают из максимального периметра фюзеляжа 105. Преимущественно используют такие вентиляторы, которые обычно применяются в первых вентиляторных ступенях газовых турбин с высоким отношением обвода, например в турбинах, которые могут быть закуплены на фирме Дженерал Электрик. Они обычно используются в реактивных пассажирских самолетах большого размера и обеспечивают совместно с газовыми турбинами тягу (для каждого блока) 10000 - 30000 кг. Указанные вентиляторы являются чрезвычайно легкими и бесшумными. Обычно требуется всего 8-14 блоков вентиляторов с диаметром 1,5-4 м для создания тяги, необходимой для подъема воздушного судна весом от 15 до 30 тонн.
Обратимся теперь к рассмотрению фиг. 13D, на которой показано, что на установочных фланцах 107, 107' образованы воздуховоды (короба) 111 для установки в них вентиляторов. Короба имеют такой размер, что обеспечивается расстояние около 2 м между местоположениями вентиляторов, что позволяет подводить к каждому вентилятору воздух без помех. В коробе ниже диска вентилятора 108 может быть установлен индивидуальный блок привода 99 с высокоскоростным бесщеточным двигателем с постоянными магнитами высокой плотности, непосредственно насаженный на вал вентилятора. Блоки привода 99 с двигателями преимущественно имеют выходную мощность 800 - 2500 КВт. Электроэнергия для привода во вращение каждого из вентиляторов 108а - 108g и 108а' - 108g' подается от центральных силовых установок 113, расположенных в хвосте воздушного судна. Требуемую мощность получают от турбоэлектрической системы привода (TEDS), подробно описанной ранее со ссылкой на фиг. 11.
Ниже вентиляторов в коробах 111 установлены дефлекторы (устройства отклонения) тяги 109. Дефлекторы тяги 109 могут активно управляться для отклонения тяги до 25o вбок влево и вправо относительно вертикальной оси тяги. Для того чтобы позволить создание момента рыскания за счет отклонения тяги, независимо от создания поступательного перемещения вперед и назад, дефлекторы тяги четырех вентиляторов, наиболее близких к носу и корме, а именно 108а, 108b, 108а', 108b' 108f, 108f', 108g, 108g', имеют оси поворота, параллельные z-оси фюзеляжа 105, а дефлекторы остальных вентиляторов имеют оси поворота, параллельные x - оси.
Преимущественно, дефлекторы тяги вентиляторов 108d, 108d', расположенных по центру, установлены под вентиляторами в кольцевых рамках 117 с опорой на роликовых подшипниках. Кольцевые рамки 117, в которых установлены дефлекторы тяги 109, снабжены соответствующими механическими средствами для обеспечения быстрого вращения относительно их оси, что в результате облегчает быстрое изменение направления приложения тяги ориентировочно по меньшей мере на 180o, при обычной скорости вращения 90o-120o в секунду.
Верхнее и нижнее отверстия в коробе 111, через которое производят установку каждого вентилятора, могут быть перекрыты при помощи жалюзи 118, 118' для уменьшения лобового сопротивления в том случае, когда трастеры VTOL не используются, обычно в крейсерском полете.
Электроэнергию для вращения электродвигателей вентиляторов 99 получают от силовых установок 113, в которых используются высокоскоростные генераторы переменного тока 119. Бесщеточные высокоскоростные генераторы переменного тока 119 непосредственно насажены на валы больших газовых турбин 120, которые обычно создают выходные мощности 5000 - 10000 кВт. Управление формирователем тока на выходе электронного блока производится при помощи компьютеров, подключенных к системам навигации и управления полетом воздушного судна для обеспечения подачи надлежащим образом модулированной электрической мощности к каждому из бесщеточных двигателей 99.
По осевой линии задней секции фюзеляжа 105 в коробах 112а, 112b, 112с могут быть установлены дополнительные вентиляторы 108h, 108i, 108j (показанные пунктиром), аналогичные ранее описанным, при этом плоскость вращения вентилятора является вертикальной. Вентиляторы расположены ориентировочно у 95% длины хорды подъемного тела фюзеляжа 105. Указанные вентиляторы 108h, 108i, 108j образуют отдельную систему тяги вперед воздушного судна. Электроэнергию, необходимую для вращения этих вентиляторов, также получают при помощи той же самой комбинации турбины с высокоскоростным генератором переменного тока, имеющейся в силовых установках 113.
Впускные воздуховоды 114а, 114b, 114с для указанных блоков вентиляторов 108h, 108i, 108j встроены в верхнюю и нижнюю задние поверхности фюзеляжа ориентировочно в положении 85-90% длины хорды фюзеляжа. Спутные струи вентиляторов выходят через каналы 112а, 112b, 112с, выполненные по центру хвостовой части воздушного судна. Расположение впускных воздуховодов 114а, 114b, 114c для задних вентиляторов 108h, 108i, 108j позволяет снизить эффект образования пограничного слоя. Впускные воздуховоды могут быть выполнены на поверхности фюзеляжа в виде кольцевой щели 118 всасывания пограничного слоя, что способствует эффективному созданию тяги в спутной струе и одновременно управлению пограничным слоем, при обеспечении этих характеристик с синергией.
На судне AHA легко и точно осуществляется контроль по курсу. Приложение дифференциальных и коллективных векторов тяги, создаваемых дефлекторами тяги вентиляторов 108а - 108g и 108а' - 108g', действующими по осям x и z, обеспечивает моменты рыскания, которые позволяют производить поступательные перемещения судна с малой скоростью в стороны, а также вперед и назад. Дополнительное отклонение тяги в любом направлении на угол от 0o до 180o может быть обеспечено при помощи вентиляторов 108d, 108d' за счет поворота их дефлекторов. Это позволяет произвести точную настройку векторов для создания полной картины вектора управления, который дает возможность добиться точного управления и любого желательного направления полета при зависании и в режиме VTOL. Кроме того, установленные на корме вентиляторы также могут быть оборудованы дефлекторами тяги и могут быть использованы для контроля по курсу при полете вперед и при зависании. Это особенно полезно в случае лобового ветра, действующего в режиме зависания или VTOL.
Высокоскоростные вентиляторы 108а - 108g и 108а' - 108g' работают при очень высоких скоростях вращения, составляющих 6000 - 10000 об/мин. Дисковая нагрузка этих вентиляторов увеличена на 50% по сравнению с обычными пропеллерами - несущими винтами, а именно ориентировочно от 80-90 кг/м2 до 140-160 кг/м2, однако скорости скоса спутной струи вниз и характеристики удельной подъемной силы, измеренной как кг подъема на 1 лошадиную силу (hp), остаются в экономически приемлемом диапазоне. Плотность колонны тяги остается в диапазоне, который позволяет избежать проблем эрозии почвы, которые следует принимать во внимание для любого воздушного судна, имеющего режим зависания.
Критичность полного отказа системы тяги в режиме зависания за счет любого индивидуального отказа двигателя снижается в результате большого числа имеющихся тяговых элементов и за счет резервирования генераторов мощности, а также за счет существенно меньшего разбаланса момента, вызванного отказом одного или двух блоков вентиляторов VTOL. В соответствии с предпочтительным вариантом настоящего изобретения, в случае отказа одного или двух электродвигателей привода блоков вентиляторов, остальные 12 вентиляторов обеспечивают полные требуемые уровни тяги при сохранении условий безопасного полета, при этом суммарная тяга практически сохраняется равной 100%. Характеристики тяги могут быть сохранены в случае отказа одной из турбин за счет увеличения выходной мощности работоспособных турбин.
В альтернативном варианте обеспечивается аэродинамическое уменьшение лобового сопротивления в крейсерском полете за счет управления пограничным слоем и за счет тяги в спутной струе. За счет использованной геометрии получают 20-30% снижения сопротивления в спутной струе, особенно в случае относительно большого подъемного тела фюзеляжа воздушного судна. Тот факт, что турбинные двигатели с всасыванием воздуха установлены вблизи от кормы и преимущественно в пределах 85-95 % длины хорды фюзеляжа, позволяет относительно просто произвести комбинацию кольцевой щели всасывания и заборных (приточных) воздуховодов в местоположении у 85% длины фюзеляжа, с обеспечением возможности создания задней тяги.
Несмотря на то, что были описаны предпочтительные варианты осуществления изобретения, совершенно ясно, что в них специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят, однако, за рамки приведенной далее формулы изобретения.
Реферат
Изобретение относится к области авиации. Судно имеет фюзеляж, предназначенный для создания подъемной силы, и четыре секции крыльев, установленные тандемом (последовательно) с возможностью поворота относительно их нейтральной оси. Каждая секция крыльев имеет установленный на ней поворотный блок пропеллер - несущий винт для создания тяги. Крылья и пропеллеры встроены в фюзеляж при помощи аутригера, который является жестким по конструкции и предназначен для распределения усилий от крыльев и пропеллеров. Фюзеляж имеет форму, которая обеспечивает создание аэродинамической подъемной силы в воздушном потоке и облегчает конструирование за счет сведения к минимуму числа требующихся панелей различной кривизны. Носовой и хвостовой конусные обтекатели, а также нижняя рама фюзеляжа облицованы полужесткими панелями. Полужесткие панели покрытия рамы образованы из газонепроницаемого и стойкого к истиранию слоистого материала и соединены с рамой при помощи промежуточного ребра и блока защелки. Рама образована из множества изогнутых удлиненых сегментов, установленных последовательно, ортогонально длинной оси фюзеляжа, и соединенных при помощи торсионных элементов. Для приведения воздушного судна в движение использована турбоэлектрическая система тяги. Изобретение направлено на повышение грузоподъемности и крейсерской скорости полета. 4 с. и 42 з.п. ф-лы, 13 ил., 1 табл.
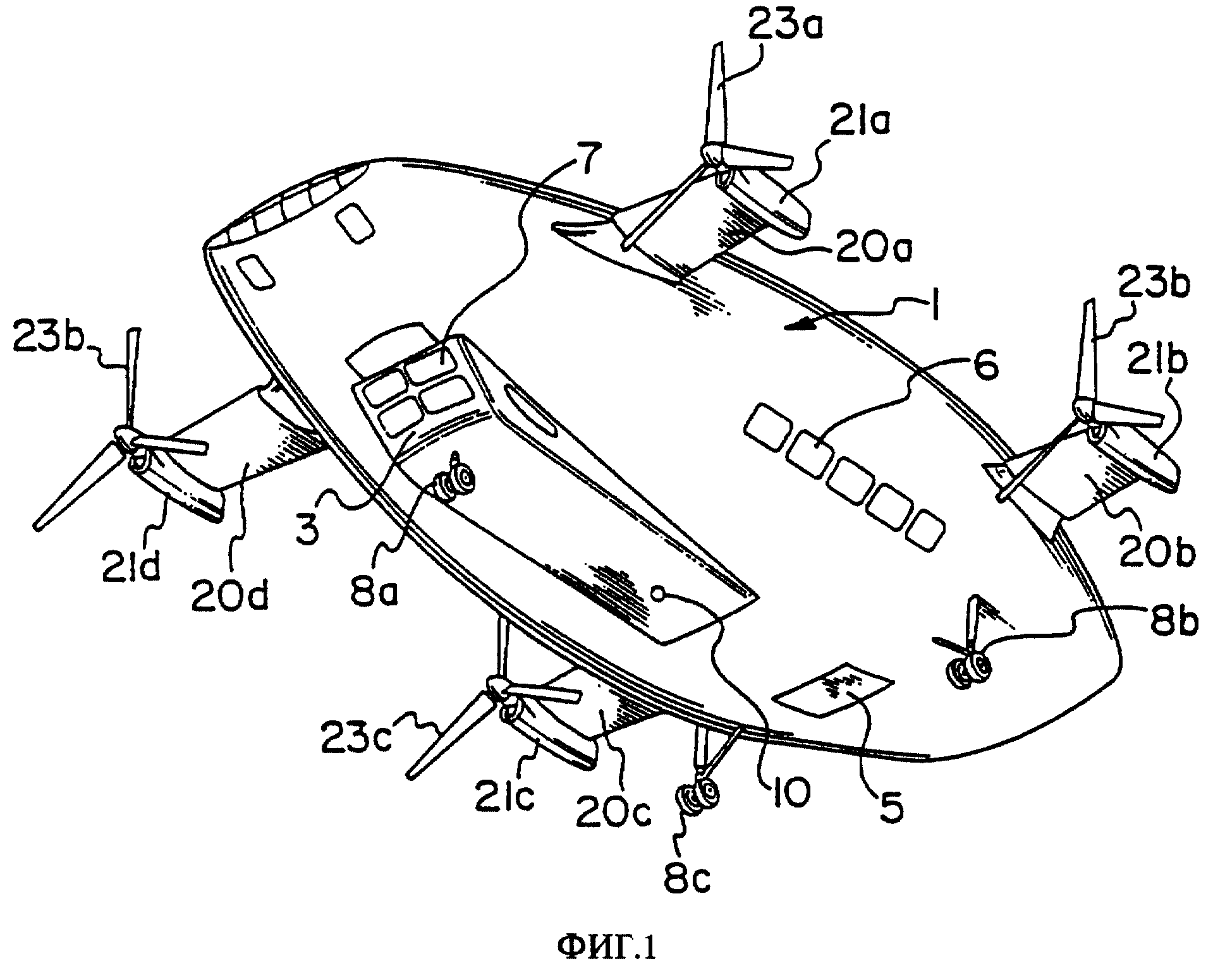
Комментарии