Винт пирогова махового действия с асимметрично поворотной лопастью - RU2501712C1
Код документа: RU2501712C1
Чертежи
















Описание
Изобретение относится к области воздушного, надводного и подводного
транспорта, в частности к воздушным винтам самолетов, вертолетов и надводных транспортных средств и к водяным винтам надводных и подводных транспортных средств.
Техническое решение также может быть использовано в устройствах с лопастными колесами для погрузочно-разгрузочных работ жидких и сыпучих веществ.
Известен винт махового действия с асимметрично поворотной лопастью, содержащий корпус, выполненный с возможностью вращения относительно продольной оси посредством приводного механизма, по меньшей мере, одну лопасть, установленную в корпусе на оси и снабженную индивидуальным приводом (опубликованная заявка RU №2010144758 «Способ образования махов и устройство для его осуществления в виде машущего винта» на патент России, МПК B63H 1/00 (2006.01), В64С 11/00 (2006.01), дата публикации 10.05.2012).
Данное техническое решение является наиболее близким к изобретению, поэтому принято за прототип.
Недостатками прототипа является невысокая эффективность при использовании на транспортных средствах вследствие нестабильности направления вектора подъемной силы, вызванной постоянным изменением положения плоскости лопасти относительно направления ее вращения и вдоль ее продольной оси.
Задачей изобретения является создание средства преобразования маховых движений лопастей в поступательное движение технического объекта или перемещаемой среды.
Технический эффект - стабилизация траектории движения объекта при перемещении его в заданном направлении.
Технический результат от использования заявленного технического решения заключается в обеспечении стабильности положения вектора силы в направлении поступательного перемещения объекта от воздействия лопасти.
Ниже приведены общие и частные существенные признаки, характеризующие причинно-следственную связь изобретения с указанным техническим результатом.
Винт махового действия с асимметрично поворотной лопастью, содержащий корпус, выполненный с возможностью вращения относительно своей продольной оси посредством приводного механизма, и, по меньшей мере, одну лопасть, установленную на оси, снабженной приводом, и закрепленную на корпусе. Корпус выполнен в виде полой оболочки, имеющей на наружной поверхности расположенные диаметрально противоположно продольные сквозные прорези, продольные оси которых расположены в плоскости, проходящей через ось корпуса или под острым углом к ней. Упомянутая лопасть размещена внутри полости корпуса и выполнена в форме крыла, ось вращения которого установлена под углом к плоскости крыла и перпендикулярно осевой плоскости прорезей с возможностью свободного прохождения лопасти через указанные две сквозные продольные прорези на боковой поверхности корпуса. Корпус установлен на раме, снабженной средством крепления к транспортному средству, а указанные привод лопасти и приводной механизм корпуса объединены в комплексный силовой привод, выполненный с возможностью обеспечения синхронного и однонаправленного вращения корпуса и лопасти, обеспечивая периодическое совпадение асимметричного положения лопасти и указанных боковых прорезей в корпусе. Указанная полая оболочка может иметь форму цилиндра или тела вращения криволинейного поперечного сечения. Указанные прорези могут иметь прямоугольную или криволинейную форму. Указанная ось вращения лопасти может быть установлена под прямым углом к ней. Указанная ось вращения лопасти расположена в плоскости, проходящей через ось корпуса, или может быть смещена в сторону наружной поверхности корпуса. Указанный силовой привод оси лопасти и корпуса выполнен механическим в виде угловой передачи, соединяющей ось лопасти и вал приводного механизма вращения корпуса, и может быть в виде зубчатого конического редуктора, в виде фрикционного конического редуктора, независимым электрическим, независимым электромеханическим или независимым гидравлическим. В конструкции винта с двумя лопастями лопасти вращаются во взаимно противоположные стороны с возможностью одновременного асимметричного выхода из корпуса в одну и ту же прорезь в корпусе. Указанное крепление рамы корпуса винта к транспортному средству может быть выполнено с возможностью ее произвольного поворота в пространстве, например шаровым или в виде осей, ориентированных по трем направлениям Декартовых осей координат.
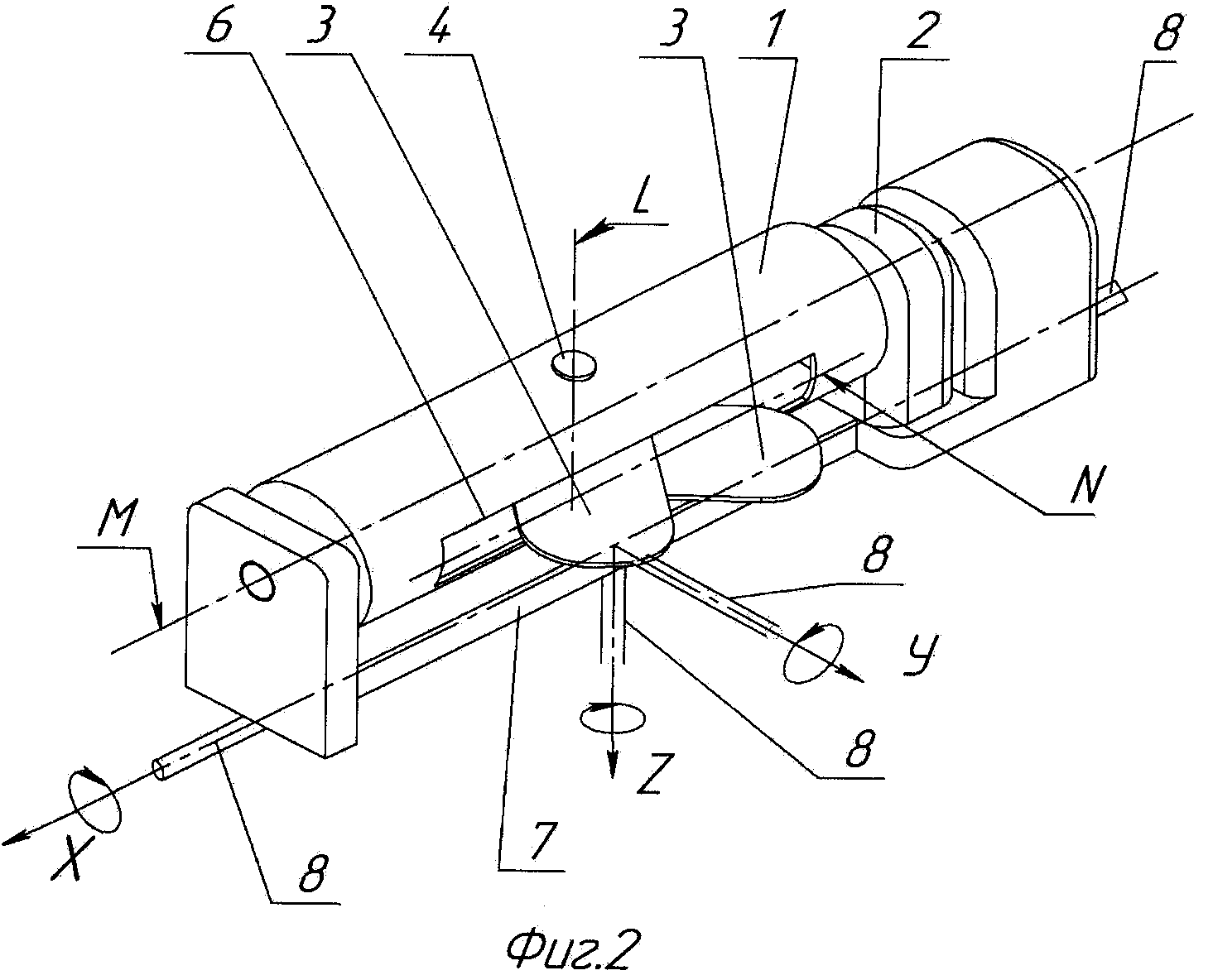
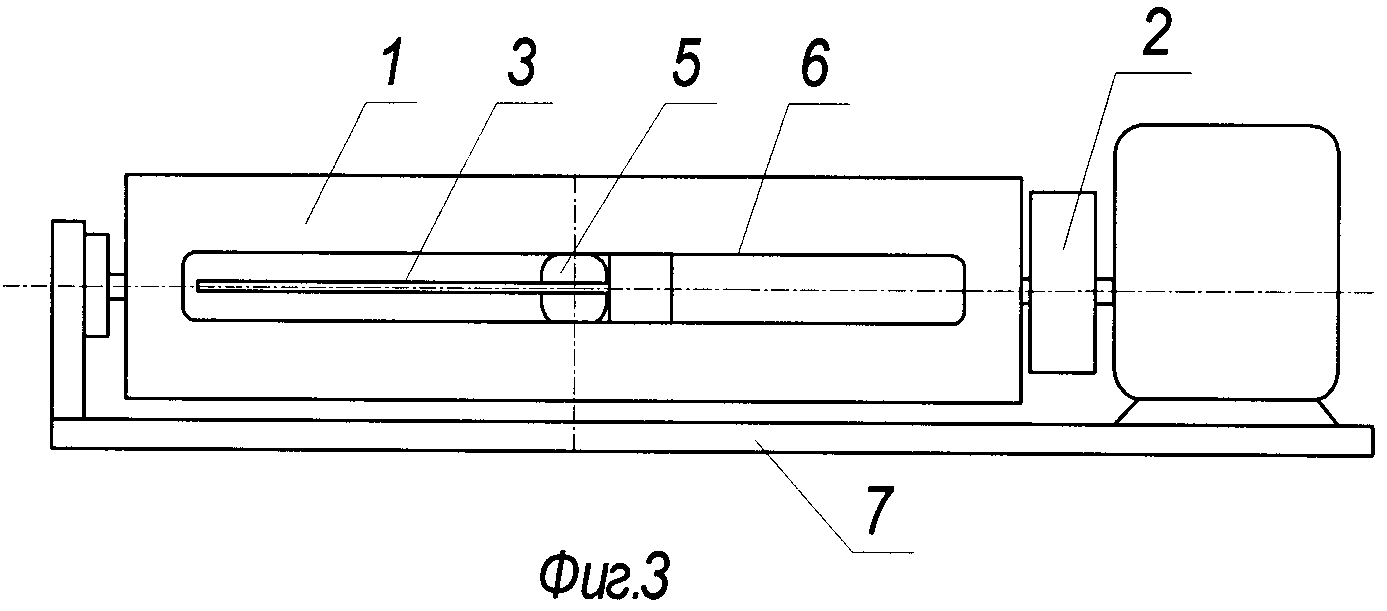
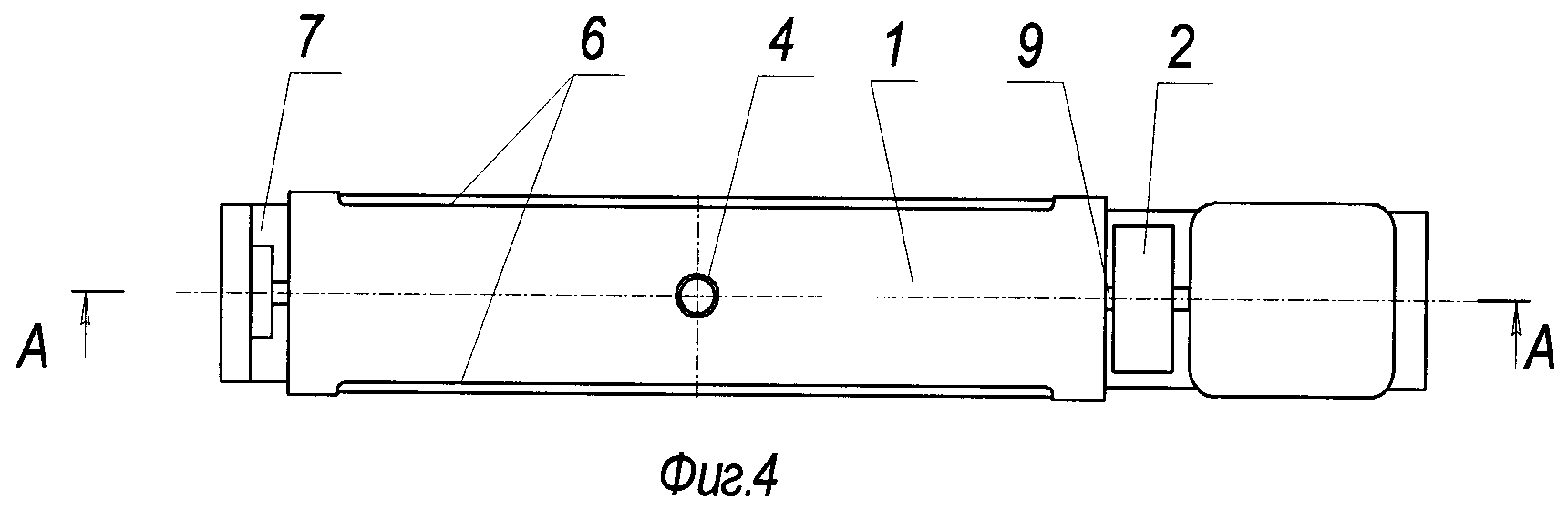
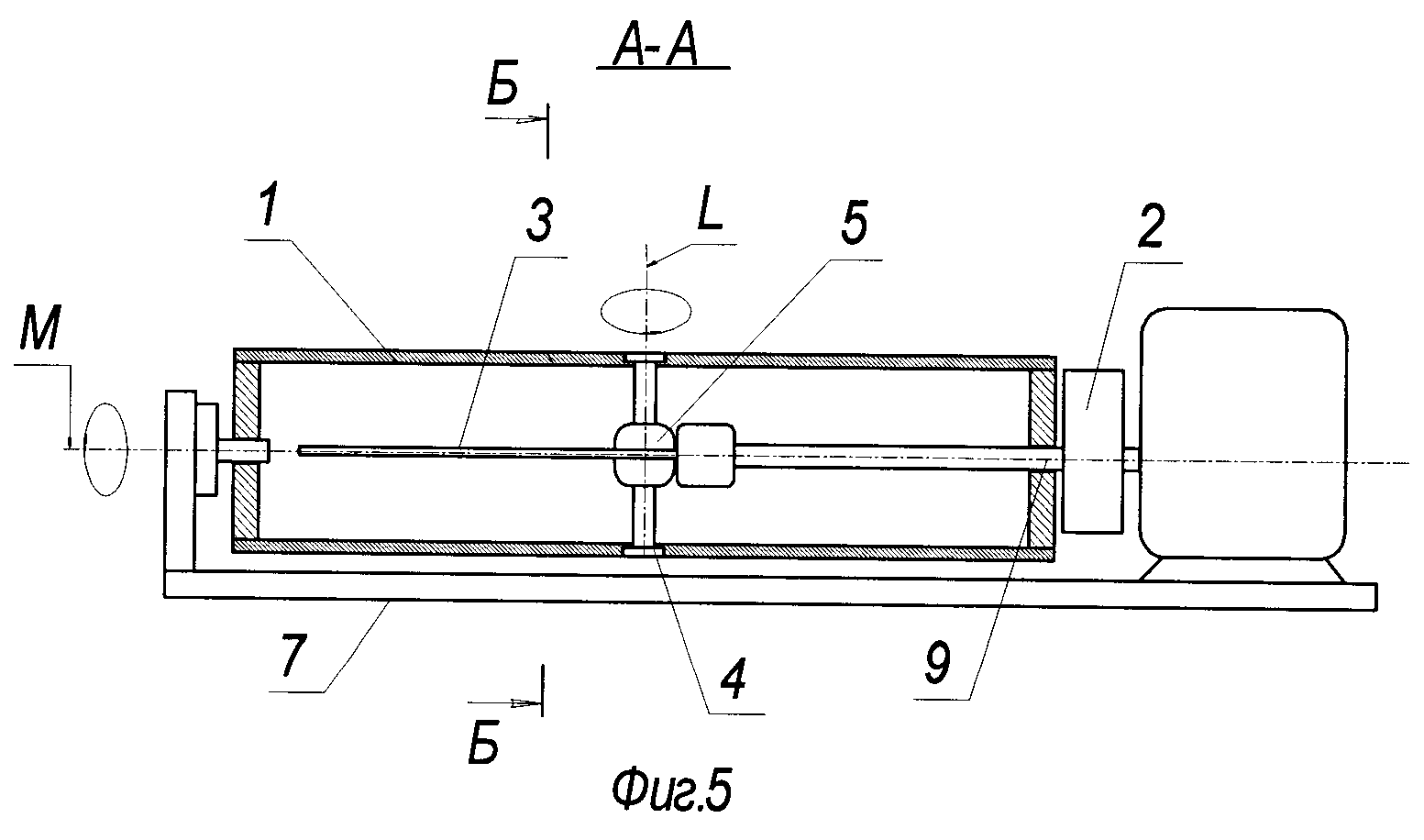
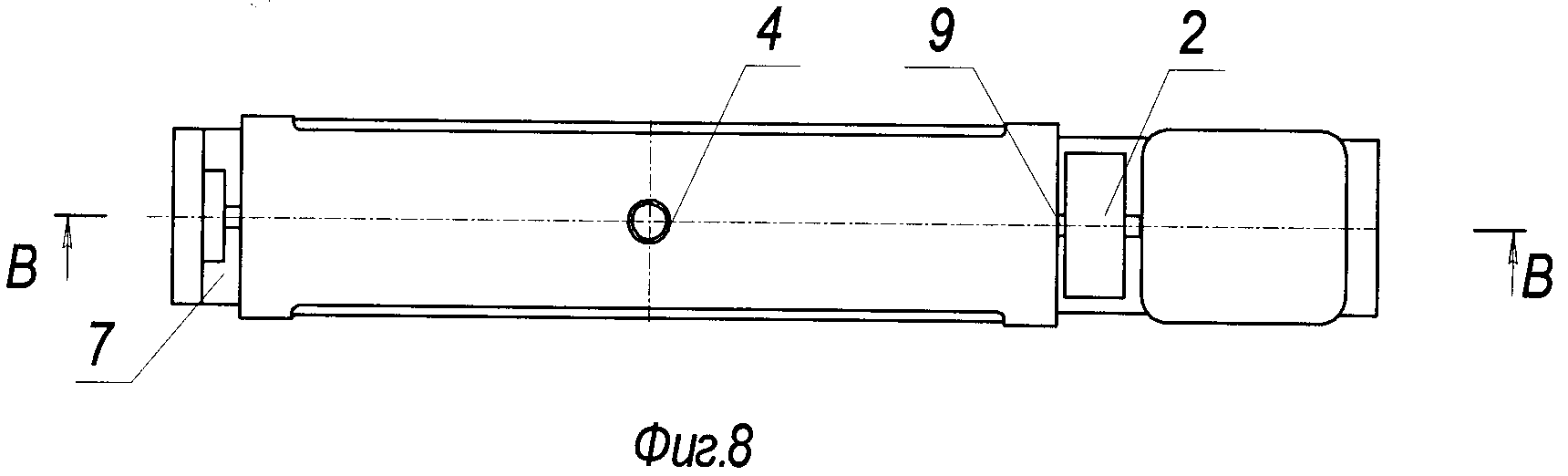
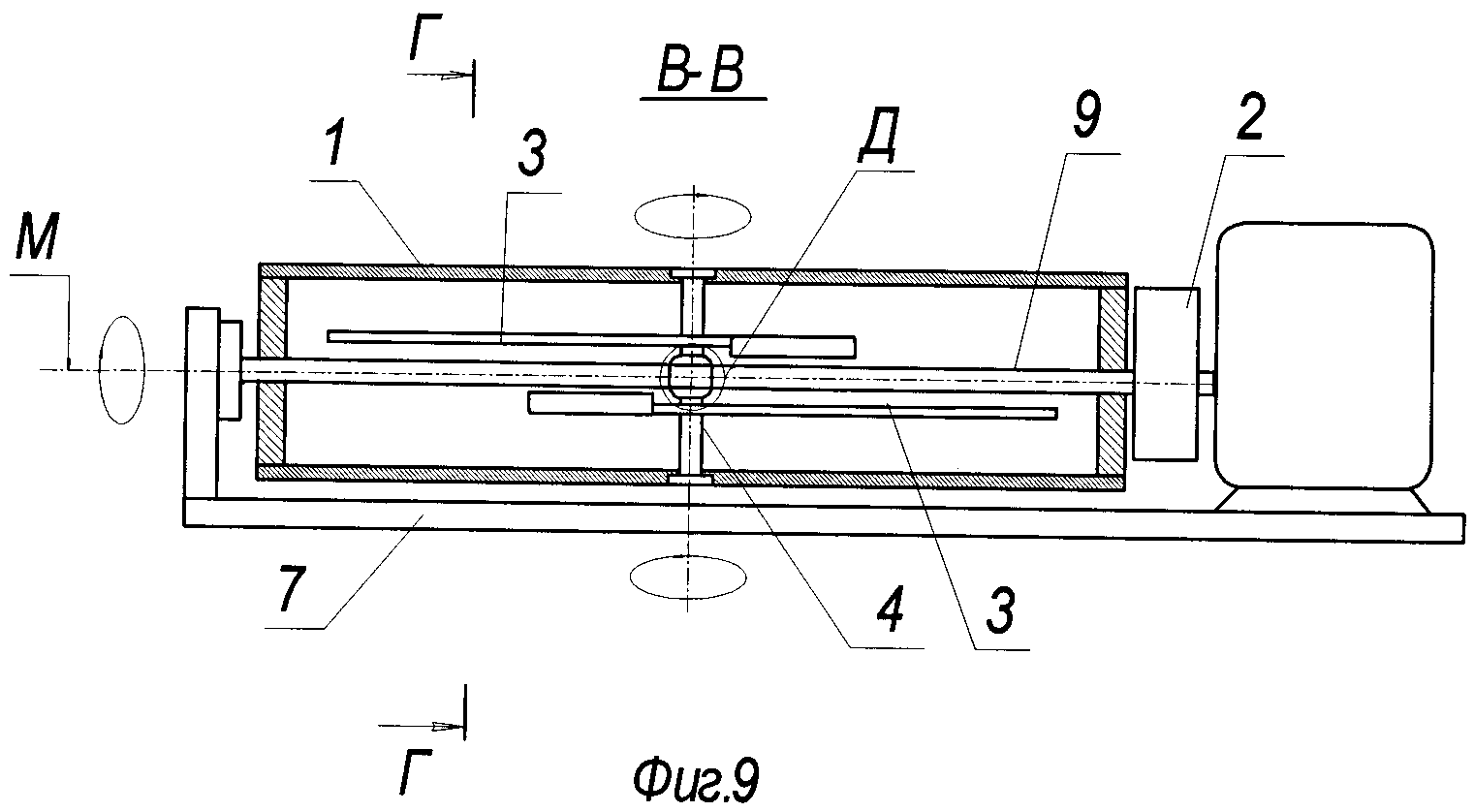
Изобретение иллюстрируется чертежами, где: на фиг.1 представлен общий вид устройства, смонтированного на транспортном средстве; на фиг.2 - вид устройства с двумя лопастями, изометрия; на фиг.3 - вид сбоку на устройство с одной лопастью; на фиг.4 - то же, вид сверху; на фиг.5 - вид А-А на фиг.4; на фиг.6 - вид Б-Б на фиг.5; на фиг.7 - вид сбоку на устройство с двумя лопастями;
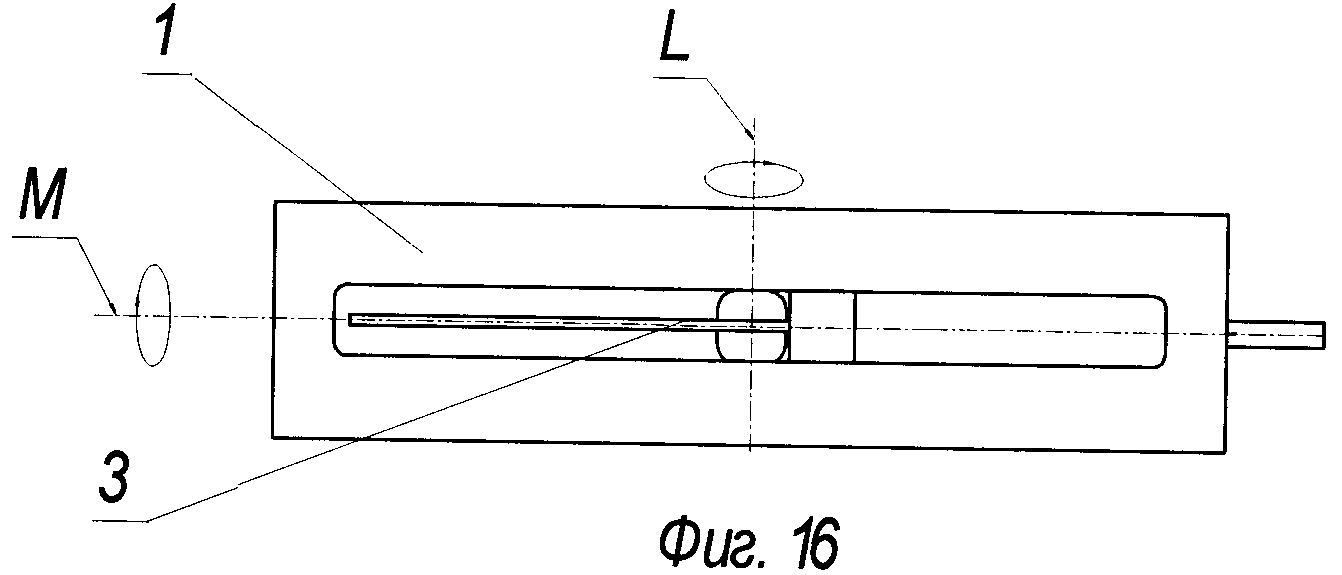
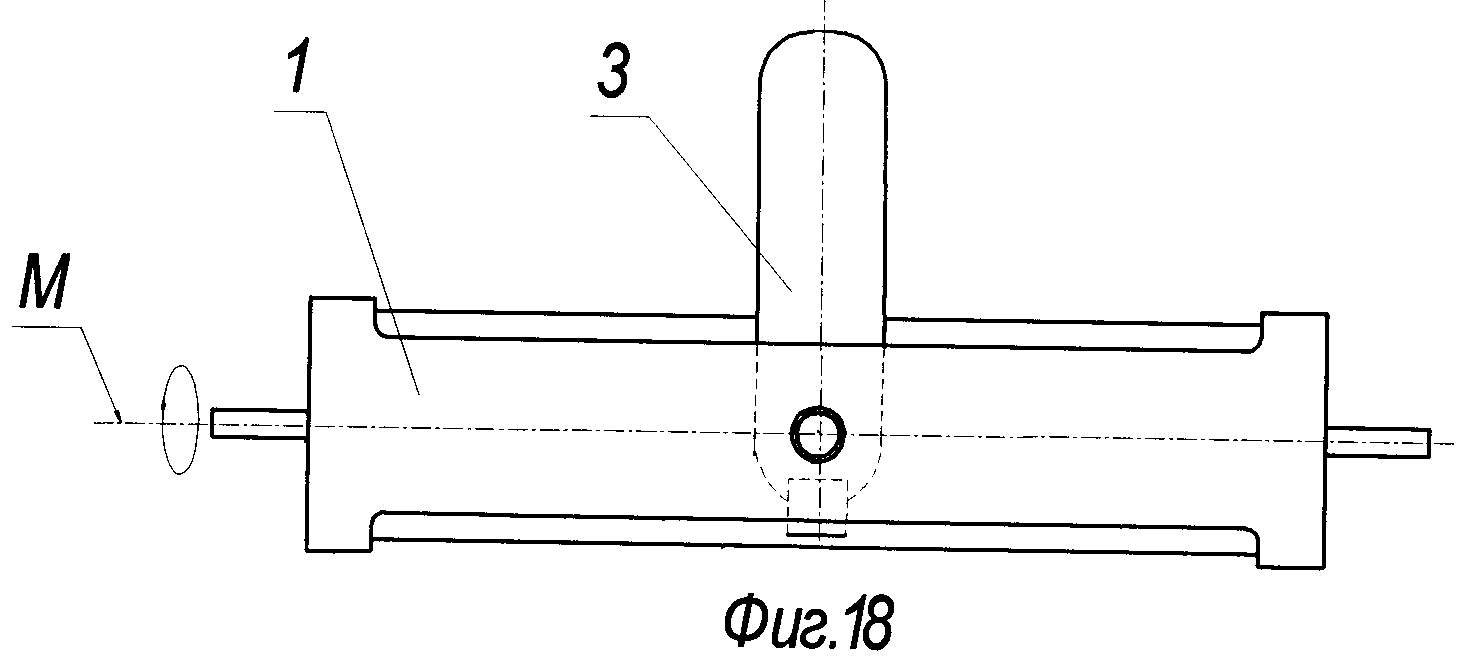
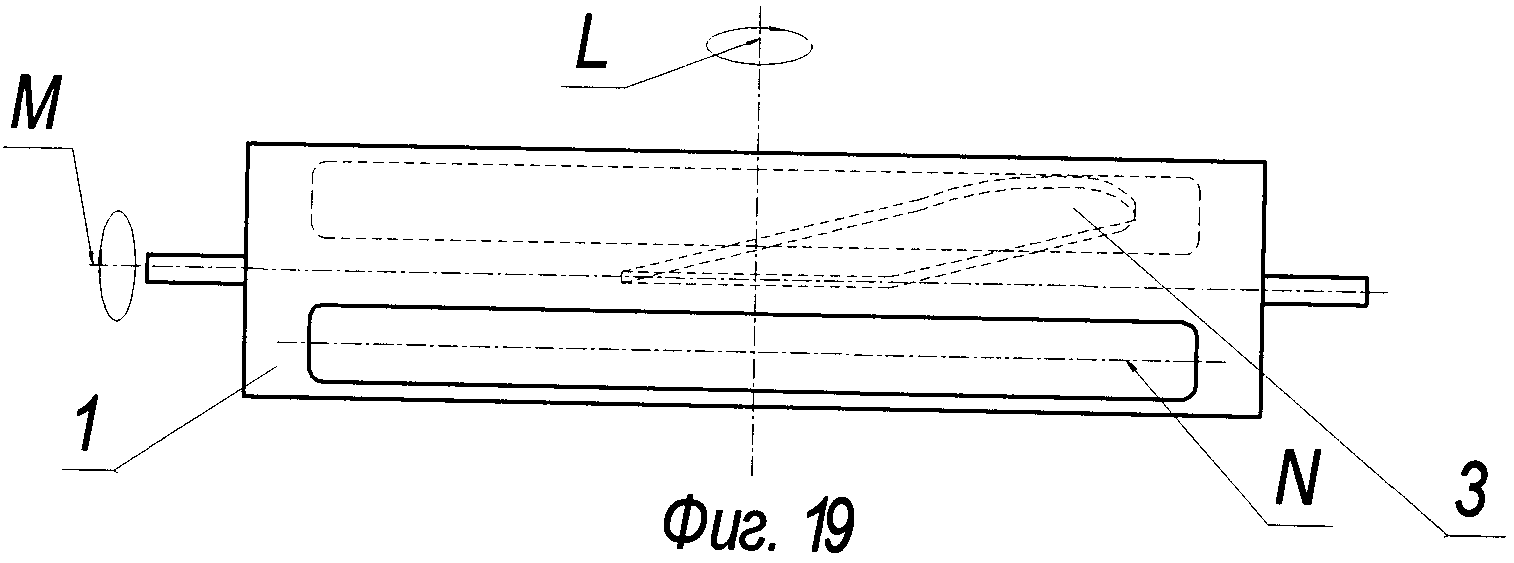
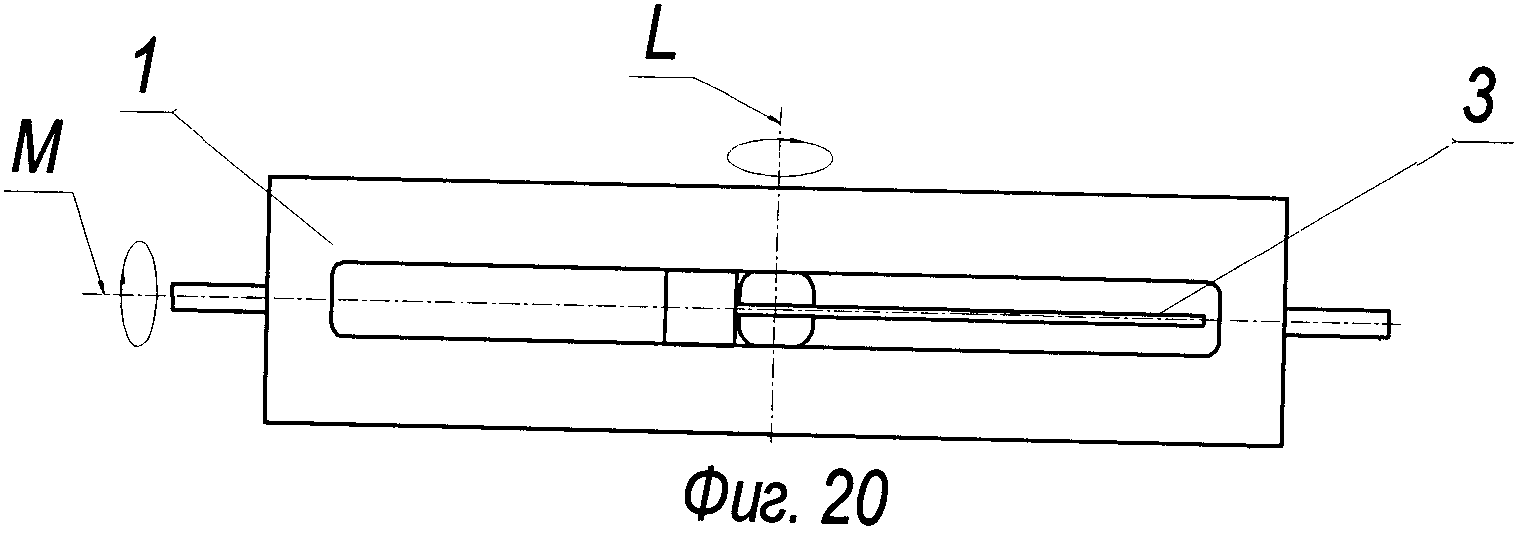
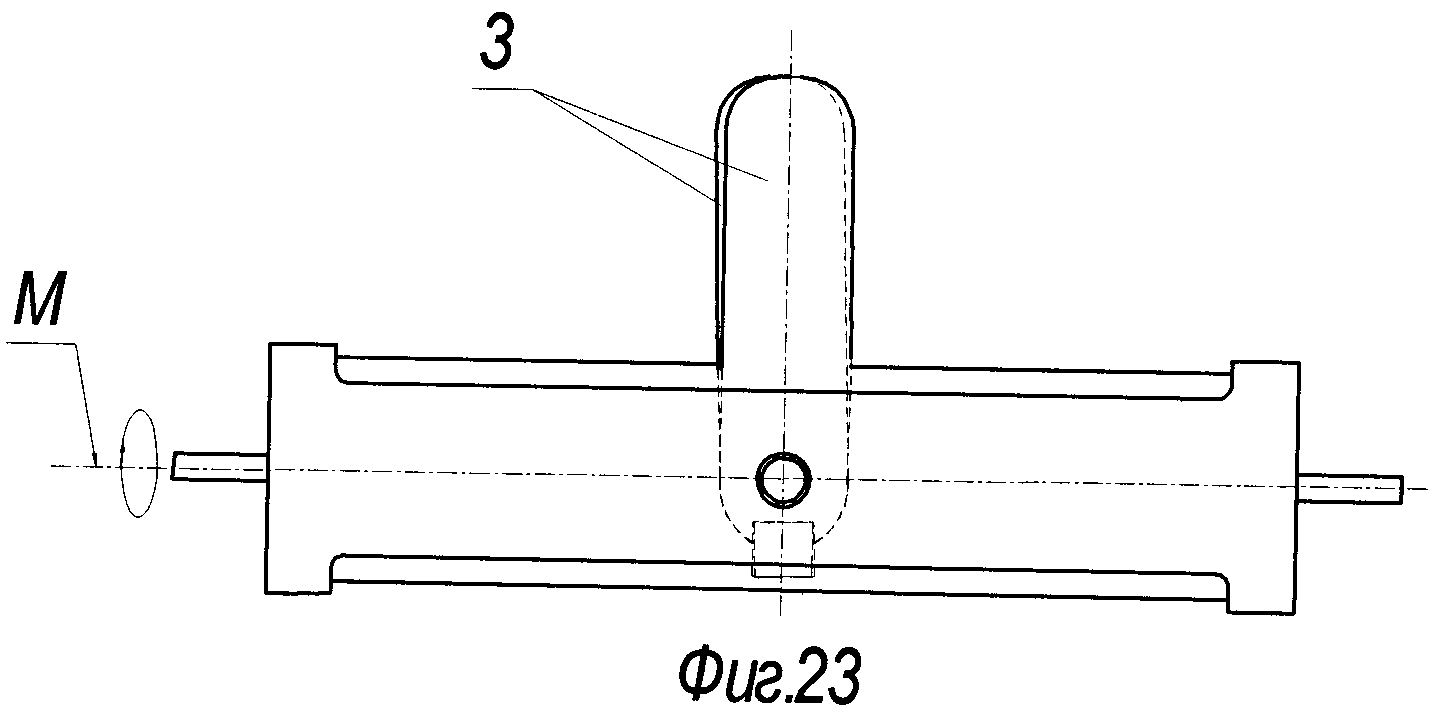
на фиг.8 - то же, вид сверху; на фиг.9 - вид В-В на фиг.8; на фиг.10 - вид Г-Г на фиг.9; на фиг.11 - вид Д на фиг.9; на фиг.12- исходное положение однолопастного устройства (и далее до фиг.20); на фиг.13 - первая четверть выхода лопасти; на фиг.14 - лопасть под прямым углом к оси корпуса; на фиг.15 - вторая четверть выхода лопасти; на фиг.16 - лопасть под углом 180° к исходному положению; на фиг.17 - лопасть в третьей четверти выхода; на фиг.18 - лопасть под углом 270° к исходному положению; на фиг.19 - лопасть в четвертой четверти от исходного; на фиг.20 - лопасть под углом 360° к исходному положению, возврат в исходное положение; на фиг.21 - исходное положение двухлопастного устройства (до фиг.29); на фиг.22 - первая четверть выхода лопастей; на фиг.23 - лопасти под прямым углом к оси корпуса; на фиг.24 - вторая четверть выхода лопастей; на фиг.25 - лопасти под углом 180° к исходному положению; на фиг.26 - лопасти в третьей четверти выхода; на фиг.27 - лопасти под углом 270° к исходному положению; на фиг.28 - лопасть в четвертой четверти от исходного; на фиг.29 -лопасти под углом 360° к исходному положению, возврат в исходное положение; на фиг.30 - суммарная траектория движения конца лопасти; на фиг.31 - график изменения подъемной силы лопасти за один взмах.
Винт махового действия состоит из корпуса 1, выполненного с возможностью вращения относительно своей продольной оси М посредством приводного механизма 2, и, по меньшей мере, одной лопасти 3, установленной на оси 4, снабженной приводом 5, и закрепленной на корпусе 1.
Корпус 1 может быть выполнен в виде голой оболочки, имеющей на наружной поверхности расположенные диаметрально противоположно продольные сквозные прорези 6, продольные оси N (фиг.2) которых расположены в плоскости, проходящей через ось М корпуса или под острым углом к ней (не показано). В вариантном исполнении корпус может иметь рамную структуру, покрытую указанной оболочкой или без нее.
Упомянутая лопасть 3 размещена внутри полости корпуса 1 и выполнена в форме крыла, ось вращения L которого установлена под углом к плоскости крыла и перпендикулярно осевой плоскости прорезей 6 с возможностью свободного прохождения лопасти 3 через указанные две сквозные продольные прорези 6, выполненные на боковой поверхности корпуса 1.
Корпус 1 установлен на раме 7, снабженной средством крепления 8 к транспортному средству, а указанные привод 5 лопасти 3 и приводной механизм 2 корпуса 1 объединены в комплексный силовой привод, выполненный с возможностью обеспечения синхронного и однонаправленного вращения корпуса 1 и лопасти 3, обеспечивая периодическое совпадение асимметричного положения лопасти 3 и указанных боковых прорезей 6 в корпусе 1. При этом лопасть 3 всегда выходит из корпуса 1 через прорези, когда они проходят внешнюю половину круга своей траектории движения.
Указанная полая оболочка (корпус) 1 может иметь форму цилиндра или тела вращения криволинейного (не показано) поперечного сечения. Указанные прорези 6 могут иметь прямоугольную или криволинейную (не показано) форму. Указанная ось L вращения лопасти 3 может быть установлена под прямым углом к ней или под другим углом при условии обеспечения совпадения лопасти 1 и прорезей 6. Указанная ось L вращения лопасти 3 может быть расположена в плоскости, проходящей через ось М корпуса 1 или может быть смещена в сторону наружной поверхности корпуса 1. Указанный силовой привод оси 4 лопасти 3 и корпуса 1 может быть выполнен механическим в виде угловой передачи, соединяющей ось 4 лопасти и вал 9 приводного механизма 2 вращения корпуса 1 и может быть в виде зубчатого конического редуктора 10 (фиг.11), в виде фрикционного конического редуктора, независимым электрическим, независимым электромеханическим или независимым гидравлическим. В конструкции винта с двумя лопастями (фиг.9) лопасти 3 вращаются во взаимно противоположные стороны с возможностью одновременного асимметричного выхода из корпуса 1 в одну и ту же прорезь 6 в корпусе 1. Указанное крепление рамы 7 корпуса 1 винта к транспортному средству 11 может быть выполнено с возможностью ее произвольного поворота в пространстве, например шаровым (фиг.1) или в виде осей, ориентированных по трем направлениям Декартовых осей координат (фиг.2).
Сравнение заявленного технического решения с уровнем техники, известным из научно-технической и патентной документации на дату приоритета в основной и смежной рубриках, не выявило средство, которому присущи признаки, идентичные всем признакам, содержащимся в предложенной заявителем формуле изобретения, включая характеристику назначения. Т.е. совокупность существенных признаков заявленного решения ранее не была известна и не тождественна каким-либо известным техническим решениям, следовательно, оно соответствует условию патентоспособности "новизна".
Данное техническое решение промышленно применимо, поскольку в описании к заявке и названии изобретения указано его назначение, оно может быть изготовлено промышленным способом и использовано в транспортных средствах и для транспортировки жидких и сыпучих веществ.
Техническое решение работоспособно, осуществимо и воспроизводимо, а отличительные признаки устройства позволяют получить заданный технический результат, т.е. являются существенными.
Техническое решение в том виде, как оно охарактеризовано в каждом из пунктов формулы, может быть осуществлено с помощью средств и методов, описанных в прототипе, ставшем общедоступным до даты приоритета изобретения. Следовательно, заявленное техническое решение соответствует условию патентоспособности "промышленная применимость".
Анализ известных технических решений в области изобретения показал, что предложенное устройство не следует для специалиста явным образом из уровня техники, поскольку не выявлены решения, имеющие признаки, совпадающие с отличительными признаками изобретения, и не подтверждена известность влияния отличительных признаков на указанный в материалах заявки технический результат. Т.е. заявленное изобретение имеет признаки, которые отсутствуют в известных технических решениях, а использование этих признаков в заявленной совокупности существенных признаков дает возможность получить новый технический результат - обеспечение стабильности положения вектора силы в направлении поступательного перемещения объекта от воздействия лопасти.
Следовательно, предложенное техническое решение может быть получено только путем творческого подхода и неочевидно для среднего специалиста в этой области, т.е. соответствует условию патентоспособности изобретения «изобретательский уровень» и, следовательно, является новым и имеет изобретательский уровень.
Устройство осуществляется следующим образом.
Существуют осевые и центробежные винты.
Данное техническое решение за счет конструкции и иного принципа действия сочетает в себе и винт, и лопасть, совершающую маховые движения.
Поскольку вращение корпуса 1 и вращение лопасти 3 синхронны, то лопасть (крыло) будет совершать махи, все время выходя из прорези 6 в корпусе с одной его стороны, а чтобы лопасть 3 не задела корпус 1, необходимо положение в начале движения установить, как показано на фиг.12 или фиг.21.
При вращении корпуса 1 по часовой стрелке со стороны привода 2 лопасть 3 также вращается по часовой стрелке со стороны ее оси 4 вращения в одну и ту же сторону.
В результате получается, что за один оборот корпуса 1 лопасть 3 делает тоже один оборот, но два маха (полуоборота). Т.е. за один полуоборот вращения корпуса 1 лопасть 3 делает мах, двигаясь слева направо относительно корпуса 1, а при втором полуобороте корпуса 1 лопасть 3 делает мах, двигаясь справа налево относительно корпуса 1.
При этом, если наблюдать за перемещением конца лопасти 3 со стороны привода 2 корпуса 1, то видно, что данный конец описывает круг, а если наблюдать за этим перемещением глядя на корпус 1 сверху, то за полуоборот корпуса 1 виден след точки конца лопасти 3, который рисует фигуру в форме буквы «S", а за второй полуоборот рисует отраженную фигуру в форме буквы «S".
А если рассматривать движение лопасти 3 сбоку, то конец лопасти нарисует полукруг, в первом полуобороте корпуса 1 полукруг будет нарисован в одну сторону, во втором - в обратную.
На фиг.30 конец лопасти 3 перемещается вокруг ее оси L по траектории I и одновременно - по траектории II относительно оси М вращения корпуса 1, т.е. суммарная траектория движения конца лопасти будет III. Траектория движения края лопасти (лопастей) 3 показана пунктиром/штрихом, вид со стороны привода 2 корпуса 1.
Данная конструкция дает возможность применять данный «Винт Пирогова» на летательных, надводных и подводных транспортных средствах и других устройствах.
Преимущества данного технического решения следующие.
- Возможность динамического изменения направления движения.
- Возможность сверхзвукового перемещения. В этом случае данное устройство становится более эффективным, т.к. сверхзвуковое сжатие среды на поверхности лопасти создаст мощную тяговую силу. При сверхзвуковом движении на плоскости возникает ударный клин, этот ударный клин есть мощное сжатие воздушного потока на лопасти.
В случае с осевыми винтами это явление носит негативный характер, в данном устройстве повышает эффективность работы лопастей, создавая мощную тяговую силу. При многократной разнице скоростей самого транспортного средства и лопастей осевых винтов, создающих для него тяговую силу, даже при незначительной скорости транспортного средства, конец осевого винта движется со сверхзвуковой скоростью. При этом получается, что лобовое сопротивление винта значительно затрудняет его работу. Ввиду отсутствия лобового сопротивления при работе нашего устройства кпд «Винта Пирогова» значительно выше.
- Эффективное использование кариолисовых сил. Возникающие кариолисовы силы на маховой стороне лопастей от продольных потоков среды создают дополнительную движущую силу.
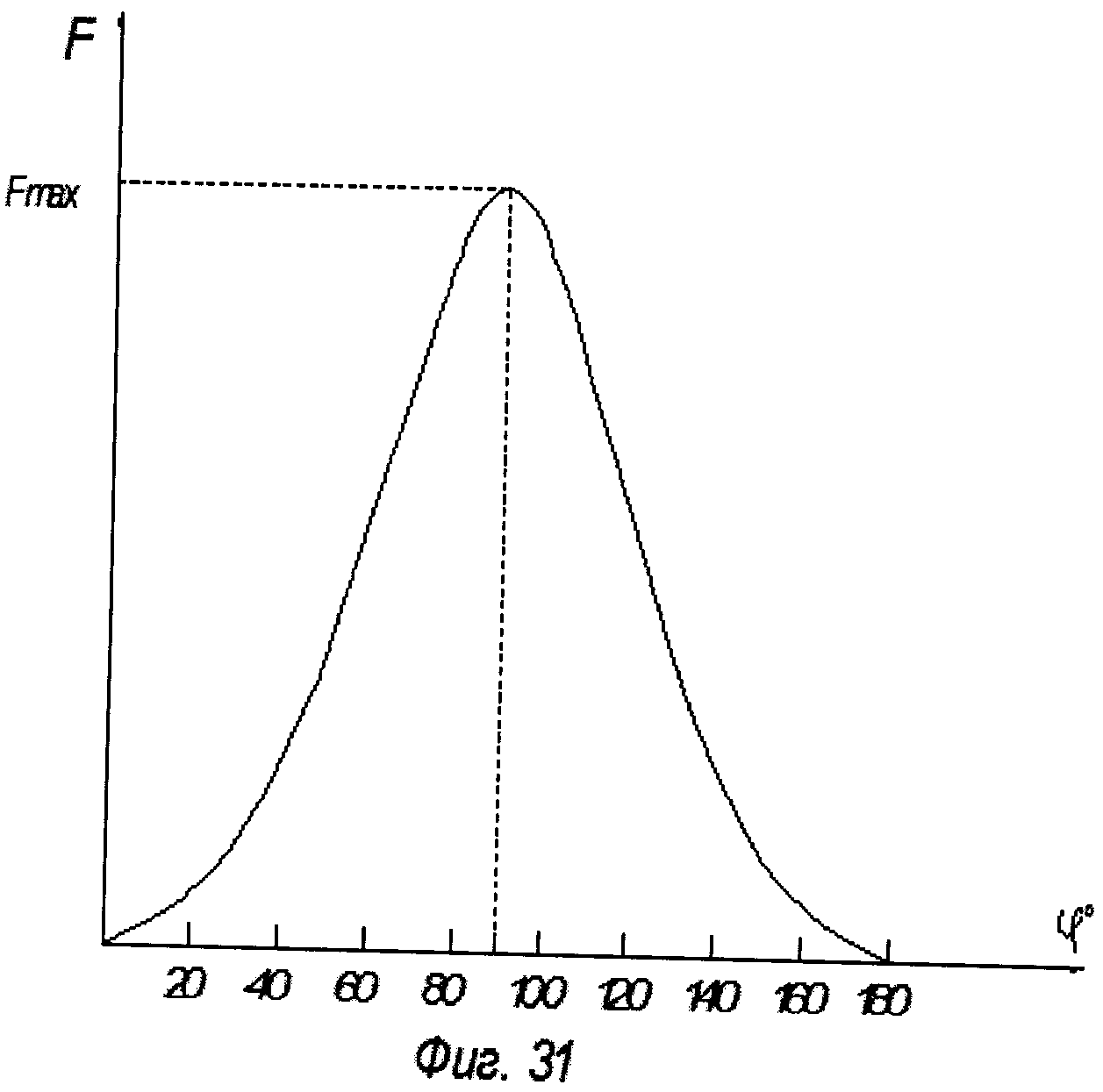
Оценочный график изменения тяговой силы лопасти будет выглядеть, как показано на графике зависимости гребного усилия винта от угла поворота лопасти (фиг.31), откуда видно, что максимальное усилие маха крыла при его полном выдвижении в горизонтальном положении относительно рамы, как показано на фиг.2.
Использование винта данной конструкции позволяет создать средства преобразования маховых движений лопастей в поступательное движение транспортного средства или другого технического объекта, а также перемещаемой среды. При этом потери мощности у данного устройства на бесполезное движение лопасти (лопастей), незначительны, т.к. неэффективный взмах лопасти (лопастей) происходит при их малом выходе из прорезей в корпусе.
Реферат
Изобретение относится к области воздушного и водного транспорта, в частности к движителям летательных аппаратов и водных транспортных средств. Винт махового действия состоит из полого корпуса, внутри которого могут размещаться одна или две лопасти на соответствующих осях. Корпус выполнен в виде полой оболочки с диаметрально противоположными продольными сквозными прорезями, при этом корпус может вращаться относительно своей продольной оси. Привод лопасти и приводной механизм корпуса объединены в комплексный силовой привод, выполненный с возможностью обеспечения синхронного и однонаправленного вращения корпуса и лопасти, обеспечивая периодическое совпадение асимметричного положения лопасти и указанных боковых прорезей в корпусе. Полая оболочка может иметь форму цилиндра или тела вращения криволинейного поперечного сечения, а указанные прорези - прямоугольную или криволинейную форму. Указанная ось вращения лопасти может быть установлена под разными углами к ней или смещена к наружной поверхности корпуса. Указанный силовой привод оси лопасти и корпуса может быть механическим, независимым электрическим, независимым электромеханическим или независимым гидравлическим. Обеспечивается стабильность положения вектора силы в направлении поступательного перемещения объекта от воздействия лопастей. 16 з.п. ф-лы, 31 ил.
Комментарии