Движительная установка - RU2763447C1
Код документа: RU2763447C1
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к судовой движительной (пропульсивной) установке.
Уровень техники
Гребные валы (валы гребного винта) в судовых движительных установках могут совершать вращательное движение и опираться на роликовые подшипники или подшипники скольжения.
Шариковые подшипники с глубоким желобом - это самый распространенный тип подшипников в электрических машинах. Шариковые подшипники с глубоким желобом могут работать как с радиальными, так и с осевыми нагрузками. Низкий момент сил трения в шариковых подшипниках с глубоким желобом делает их особенно пригодными для высоких скоростей. Цилиндрические роликовые подшипники используются в задачах, где они должны выдерживать высокие радиальные нагрузки. Контакт между наружной и внутренней обоймой в цилиндрическом роликовом подшипнике осуществляется не в точке, как в шариковом подшипнике, а по линии. Это распределяет нагрузку по большей площади, позволяя цилиндрическому роликовому подшипнику работать с гораздо большими радиальными нагрузками, чем шариковый подшипник. Цилиндрические роликовые подшипники не рассчитаны на работу с большими осевыми нагрузками.
Подшипники скольжения имеют практически неограниченный срок службы в том случае, если условия их работы поддерживать в пределах определенного диапазона. Электрические машины содержат подшипники скольжения на обеих сторонах. Подшипник на стороне привода может представлять собой направляющий подшипник, который способен выдерживать ограниченные неосевые нагрузки. Подшипник неприводной стороны может быть изолированным. Подшипники могут быть жестко смонтированы в каждом торцевом щите электрической машины. Корпус подшипника может быть выполнен из чугуна. Резьбовые отверстия под термометр, впуск масла, выпуск масла и индикатор уровня масла могут быть предусмотрены на обеих сторонах корпуса подшипника. Смазка подшипников скольжения может осуществляться гидродинамически по типу самосмазывания или циркуляционного смазывания. Вкладыши подшипников могут быть сферически посажены в корпус подшипника. Течение масла в самосмазывающихся подшипниках может быть гарантировано центральным расположением маслоудерживающего кольца. Точная посадка вкладыша также обеспечивает хорошую теплопередачу между вкладышем подшипника и корпусом подшипника. Вкладыш подшипника может состоять из стального тела, облицованного баббитом. Подшипники с системой циркуляционного смазывания могут также быть оснащены маслоудерживающим кольцом. Маслоудерживающее кольцо может обеспечить безопасную работу электрического мотора в случае пропадания питания, при котором ротор электрического мотора продолжает вращаться некоторое время после пропадания питания.
Подшипник скольжения (иногда также называемый гладким подшипником, скользящей опорой, втулочным подшипником, глухим подшипником, цапфовым подшипником или подшипником трения) является самым простым типом подшипника, содержащим только рабочую (несущую) поверхность без каких-либо элементов качения. Поэтому, цапфа вала, т.е. часть вала, находящаяся в контакте с подшипником, скользит по поверхности подшипника.
Электрические машины могут быть также оснащены радиальным подшипником и упорным подшипником на одной стороне вала электрической машины. Радиальный подшипник и упорный подшипник могут быть заключены в общий корпус.
Раскрытие сущности изобретения
Задача настоящего изобретения получить усовершенствованную движительную установку.
Движительная установка, соответствующая настоящему изобретению, охарактеризована в п. 1 формулы изобретения.
Движительная установка содержит:
- корпус, закрепленный посредством опорного рычага на корпусе судна, причем указанный корпус содержит первый конец и второй противоположный конец в продольном направлении корпуса;
- гребной вал, проходящий в продольном направлении корпуса внутри последнего, причем гребного вал имеет ось вращения и поддерживается с возможностью вращения внутри корпуса посредством первой опоры и второй опоры;
- гребной винт, прикрепленный по меньшей мере к одному концу гребного вала снаружи корпуса.
Движительная установка отличается тем, что:
- первая опора содержит первый радиальный подшипник и первый упорный подшипник, причем первый радиальный подшипник представляет собой подшипник скольжения, расположенный в осевом направлении внутри первого упорного подшипника, при этом первая опора расположена на первом конце корпуса, а вторая опора расположена на втором конце корпуса, или наоборот.
То, что первый радиальный подшипник расположен в осевом направлении внутри первого упорного подшипника, делает возможным обеспечение доступа к указанному первому подшипнику изнутри корпуса. Таким образом, первый подшипник можно обслуживать и/или заменять изнутри корпуса без постановки судна в сухой док. Оба подшипника, первый радиальный подшипник и первый упорный подшипник, можно заменять и/или обслуживать изнутри корпуса.
Расположение первого радиального подшипника в осевом направлении внутри первого упорного подшипника дает возможность выполнять обслуживание и/или замену первого радиального подшипника изнутри корпуса либо с осевого направления, либо с радиального направления. Конструкция первого радиального подшипника может быть такой, что подшипник можно обслуживать и/или заменять с осевого направления, или такой, что подшипник можно обслуживать и/или заменять с радиального направления.
Расположение первого радиального подшипника в осевом направлении внутри первого упорного подшипника дает возможность выполнять обслуживание и/или замену первого упорного подшипника изнутри корпуса с радиального направления.
Расположение первого радиального подшипника в осевом направлении внутри первого упорного подшипника оставляет свободное пространство в радиальном направлении снаружи радиально наружной поверхности первого радиального подшипника и снаружи радиально наружной поверхности первого упорного подшипника. Свободное пространство также остается в осевом направлении внутрь от внутреннего в осевом направлении конца первого радиального подшипника.
Краткое описание чертежей
Ниже изобретение будет описано более подробно посредством предпочтительных вариантов его осуществления со ссылками на прилагаемые чертежи, среди которых:
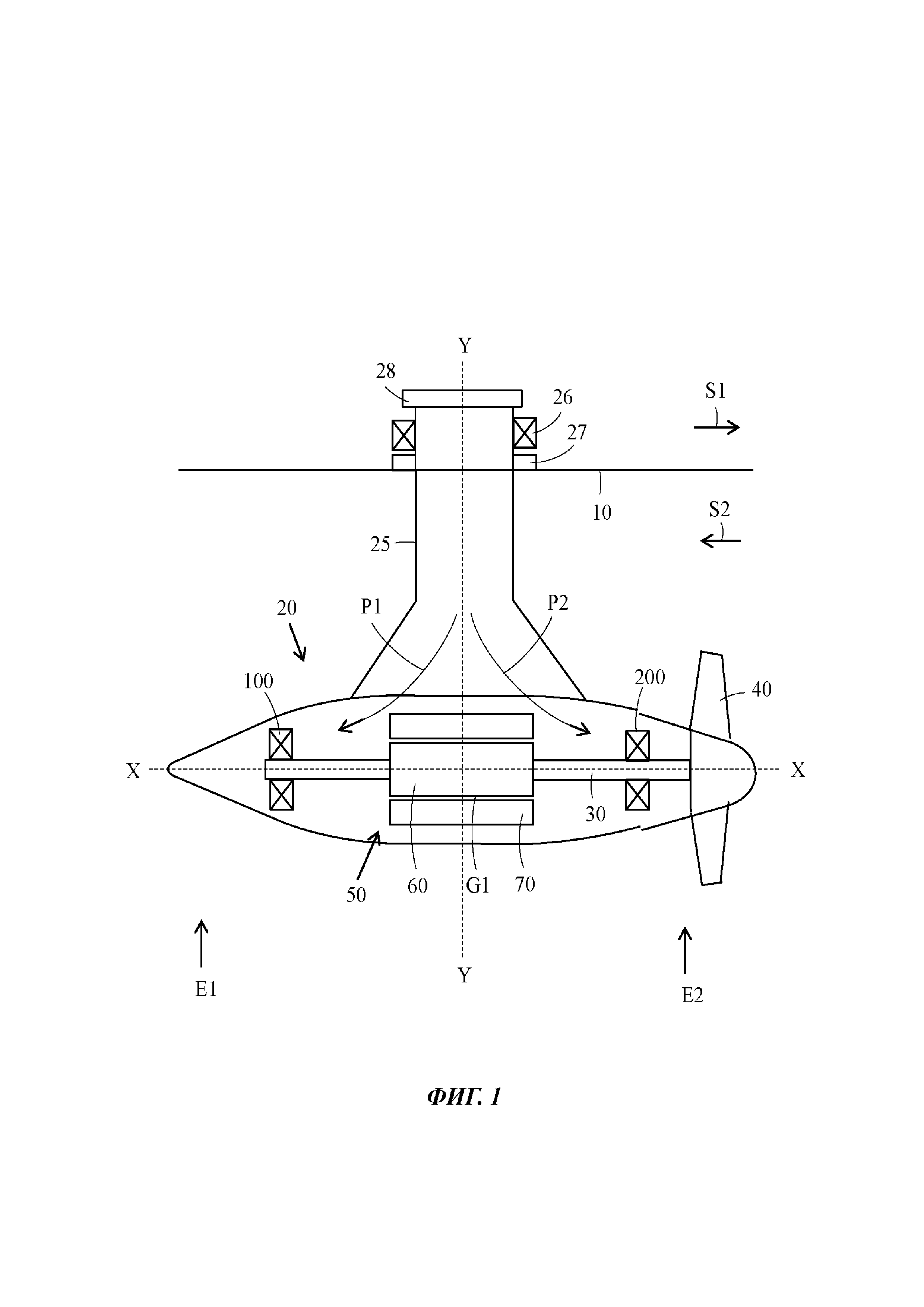
фиг. 1 изображает движительную установку в разрезе,
фиг. 2 изображает первую опору в разрезе,
фиг. 3 изображает вторую опору в разрезе,
фиг. 4 и 5 изображают радиальные подшипники в разрезе,
фиг. 6 изображает упорный подшипник в разрезе.
Осуществление изобретения
На фиг. 1 изображена движительная установка в разрезе.
Движительная установка может содержать корпус 20, который поддерживается опорным рычагом 25 на корпусе 10 судна. Корпус 20 может иметь протяженную в продольном направлении форму. Корпус 20 может образовывать кожух для различного оборудования движительной установки. Опорный рычаг 25 может быть закреплен на корпусе 10 судна с возможностью поворота. Опорный рычаг 25 может поддерживаться на корпусе 10 судна посредством опорно-поворотного подшипника 26. Дополнительное уплотнение опорного рычага 25 относительно корпуса 10 судна может быть выполнено посредством поворотного уплотнения 27. Внутри корпуса 10 судна к опорному рычагу 25 может быть прикреплено поворотное колесо 28. Поворотное колесо 28 может быть приведено в действие посредством известных электрических моторов или гидравлических моторов (не показаны).
Корпус 20 может содержать первый конец Е1 и второй конец Е2 - противоположный в продольном направлении корпуса 20. Корпус 20 может быть расположен ниже ватерлинии судна. Корпус 20 может быть водонепроницаемым, так что морская вода не может затекать в корпус 20. Опорный рычаг 25 может быть пустотелым.
Опорный рычаг 25 может проходить вниз от корпуса 10 судна. Опорный рычаг 25 может быть выполнен с возможностью вращения вокруг собственной продольной центральной оси. Продольная центральная ось Y-Y опорного рычага 25 таким образом образует ось вращения опорного рычага 25. Продольная центральная ось Y-Y опорного рычага 25 может быть вертикальной или наклонной относительно вертикальной линии. Ось Y-Y вращения опорного рычага 25 образует также ось вращения движительной установки 20. Опорный рычаг 25, и тем самым корпус 20 могут быть повернуты на 360° вокруг оси Y-Y вращения. Тем самым и движительная установка может быть повернута на 360° вокруг оси Y-Y вращения.
Внутри корпуса 20 может быть расположен гребной вал 30. Гребной вал 30 может иметь ось вращения Х-Х. Ось Х-Х вращения гребного вала 30 может также образовывать продольную ось корпуса 20. Гребной вал 30 может выступать наружу по меньшей мере с одного конца Е1, Е2 корпуса 20. В варианте осуществления изобретения, показанном на фигурах, гребной вал 30 выступает наружу из второго конца Е2 корпуса 20. Внутри корпуса 20 гребной вал 30 может поддерживаться опорами 100, 200 с возможностью вращения. Первая опора 100 может располагаться на первом конце Е1 корпуса 20. Вторая опора 200 может располагаться на втором конце Е2 корпуса 20. Первая опора 100 и вторая опора 200 могут бы расположены в соответствующем корпусе подшипника. Внутри корпуса 20 корпус подшипника может поддерживаться при помощи опорной конструкции корпуса 20. Ось Х-Х вращения гребного вала 30 может проходить в продольном направлении корпуса 20.
К гребному валу 30 с наружной стороны по меньшей мере одного конца Е1, Е2 корпуса 20 может быть присоединен гребной винт 40. В варианте осуществления изобретения, показанном на фигурах, гребной винт 40 присоединен к гребному валу 30 снаружи второго конца Е2 корпуса 20. Гребной винт 40 может совершать вращение посредством гребного вала 30. Гребной винт 40 может представлять собой винт тянущего типа, т.е. гребной винт 40 тянет судно в первом направлении S1. Первое направление S1 представляет собой нормальное направление движения судна. Однако, гребной винт 40 мог бы также совершать вращение в обратном направлении, чтобы приводить судно в движение во втором направлении S2, противоположном первому направлению S1 (реверс судна). Реверс судна может требоваться, например, при выходе из гавани и при заходе в гавань.
Движительная установка может быть размещена у кормы судна. Первый конец Е1 корпуса 20 может образовывать хвостовой конец корпуса 20, а второй конец Е2 корпуса 20 может образовывать носовой конец корпуса 20, когда гребной винт 40 тянет судно вперед в первом направлении S1.
Первая опора 100 может содержать первый радиальный подшипник и первый упорный подшипник (см. фиг. 2)
Гребной вал 30 может приводиться во вращение мотором 50. Мотор 50 может представлять собой электрический мотор. Электрический мотор 50 может быть расположен в корпусе 20. Электрический мотор 50 может содержать ротор 60, соединенный с гребным валом 30, и статор 70, который окружает ротор 60. Ротор 60 вращается вместе гребным валом 30. Статор 70 может быть неподвижно закреплен в корпусе 20. Между наружной поверхностью ротора 60 и внутренней поверхностью статора 70 имеется воздушный зазор G1. Гребной вал 30 может проходить сквозь электрический мотор 50. Противоположные концевые участки гребного вала 30 могут выступать из соответствующих осевых концов электрического мотора 50.
Электрическое питание к электрическому мотору 50 может подаваться изнутри судна. На судне могут быть установлены один или более генераторов, приводимых во вращение двигателями внутреннего сгорания. Электроэнергия, вырабатываемая генераторами на судне, может передаваться электрическому мотору 50 в корпусе 20 через токосъемное контактное кольцо, установленное в месте соединения с верхней частью опорного рычага 25.
На фигуре изображен вариант осуществления изобретения, в котором опорный рычаг 25 и тем самым корпус 20 могут быть повернуты на 360° вокруг оси Y-Y вращения. Таким образом движительная установка может быть повернута на 360° вокруг оси Y-Y вращения. С другой стороны, движительная установка могла бы быть неподвижной относительно корпуса 10 судна. В таком варианте осуществления опорный рычаг 25 был бы неподвижным. Таким образом, опорный рычаг 25 не обладал бы способностью вращения вокруг оси Y-Y вращения.
Опорный рычаг 25 может быть пустотелым и обеспечивать проход изнутри корпуса 10 судна вниз в корпус 20. Такой проход может пролегать через середину опорного рычага 25 вниз в корпус 20. Могут быть предусмотрены люки или дверцы, открывающие проход из вертикального центрального прохода к обоим концам Е1, Е2 корпуса 20, расположенным на оси Х-Х. Первый проход Р1 может вести из опорного рычага 25 в корпус 20 к первому концу Е1 корпуса 20, расположенному на оси Х-Х. Первый проход Р1 обеспечивает доступ из опорного рычага 25 через корпус 20 к первой опоре 100. Второй проход Р2 может вести из опорного рычага 25 в корпус 20 ко второму концу Е2 корпуса 20, расположенному на оси Х-Х. Второй проход Р2 обеспечивает доступ из опорного рычага 25 через корпус 20 ко второй опоре 200.
Фиг. 2 изображает первую опору в разрезе.
Первая опора 100 может содержать первый радиальный подшипник 110 и первый упорный подшипник 120. Первый радиальный подшипник 110 может быть расположен в осевом направлении Х-Х внутри первого упорного подшипника 120. Первый радиальный подшипник 110 может быть подшипником скольжения. Первый упорный подшипник 120 может также быть подшипником скольжения. Первый радиальный подшипник 110 и первый упорный подшипник 120 могут быть расположены в отдельных корпусах 131, 132 или в общем корпусе 130 подшипников. Отдельные корпуса 131, 132 подшипников могут быть скреплены друг с другом. Каждый из корпусов 131, 132 или общий корпус 130 подшипников могут поддерживаться при помощи опорной конструкции корпуса 20 внутри корпуса 20.
Первый радиальный подшипник 110 может содержать первый опорный элемент 111, окружающий гребной вал 30. Первый опорный элемент 111 может быть неподвижным. Таким образом вал 30 может вращаться внутри первого опорного элемента 111. Первый опорный элемент 111 может содержать рабочую (несущую) поверхность 112, расположенную вплотную к наружной поверхности гребного вала 30. Между наружной поверхностью гребного вала 30 и рабочей поверхностью 112 может быть использована смазка. Первый опорный элемент 111 может быть выполнен в виде цилиндрического кольца, содержащего два или более сегментов окружности, которые образуют цилиндрическое кольцо. Сегменты окружности могут быть расположены с примыканием друг к другу, так чтобы образовался цилиндр. Рабочая поверхность 112 может проходить вдоль внутренней поверхности цилиндрического кольца. Рабочая поверхность может быть образована сегментами окружности, расположенными так, чтобы противоположные края соседних сегментов окружности соединялись друг с другом, или так, чтобы противоположные края соседних сегментов окружности находились на определенном угловом расстоянии друг от друга.
Первый опорный элемент 111 может поддерживаться во втором опорном элементе 113, который окружает первый опорный элемент 111. Наружная поверхность первого опорного элемента 111 может иметь выпуклую форму, а второй опорный элемент 113 может иметь вогнутую форму. Выпуклая часть первого опорного элемента 111 может входить в вогнутую часть второго опорного элемента 113. Первый опорный элемент 111 и второй опорный элемент 113 могут таким образом двигаться друг относительно друга по указанным криволинейным поверхностям, когда происходит изгиб гребного вала 30. Второй опорный элемент 113 может быть закреплен в корпусе 130, 131 первого радиального подшипника.
Первый упорный подшипник 120 может содержать кольцо 121, выступающее радиально наружу от гребного вала 30. Кольцо 121 может быть прочно прикреплено к гребному валу 30. Таким образом, кольцо 121 может вращаться вместе с гребным валом 30. Кольцо 121 может содержать две противоположный боковые поверхности 121А, 121В. Каждая боковая поверхность 121А, 121В может опираться на элемент скольжения (фиг. 6). Элементы скольжения удерживают кольцо 121 и тем самым гребной вал 30 в надлежащем осевом положении.
Корпус 132 первого упорного подшипника 120 или общий корпус 130 первого радиального подшипника 110 и первого упорного подшипника 120 может быть прикреплен к соединительному фланцу 140. Соединительный фланец 140 может быть прикреплен к опорным конструкциям в корпусе 20. Между корпусом 130, 132 подшипника и соединительным фланцем 140 может быть предусмотрен слой электрической изоляции. Соединительный фланец 140 может быть расположен в осевом направлении снаружи первого упорного подшипника 120, обеспечивая свободное пространство в радиальном направлении между корпусом 20 и радиально наружной поверхностью первого упорного подшипника 120. Однако, также было бы возможно предусмотреть дополнительную опору между первой опорой 100 и корпусом 20 в осевом направлении внутрь от соединительного фланца 140. Такую дополнительную опору можно было бы выполнить с радиальными опорными рычагами, проходящими между первой опорой 100 и корпусом 20. Радиальные опорные рычаги можно было бы распределить по периметру радиально наружной поверхности первой опоры, так чтобы между опорными рычагами обеспечить проходы для доступа. Радиальные опорные рычаги можно было бы, например, предусмотреть в области между первым радиальным подшипником 110 и первым упорным подшипником 120, чтобы обеспечить радиальный доступ к первому радиальному подшипнику 110 и первому упорному подшипнику 120.
Когда у первого радиального подшипника 110 имеется свой собственный корпус 131, тогда корпус 131 первого радиального подшипника 110 может быть прикреплен к корпусу 132 первого упорного подшипника 120. Корпус 131 первого радиального подшипника 110 может быть болтами прикреплен к корпусу 132 первого упорного подшипника 120. Тогда первая опора 100 может поддерживаться в корпусе 20 только за счет корпуса 132 первого упорного подшипника 120. Таким образом, корпус 132 первого упорного подшипника 120 может быть закреплен на корпусе 20 в осевом направлении Х-Х снаружи от первого радиального подшипника 110. То же самое может относиться к ситуации, при которой первый радиальный подшипник 110 и первый упорный подшипник заключены в общий корпус 130 подшипников. Тогда общий корпус 130 подшипников может быть прикреплен к корпусу 20 в осевом направлении Х-Х снаружи от первого радиального подшипника 110. Таким образом, в данном варианте осуществления первая опора 100 может поддерживаться на корпусе 20 в месте в осевом направлении снаружи от первого радиального подшипника 110. Таким образом, может быть обеспечен радиальный доступ к первому радиальному подшипнику 110. Соединительный фланец 140 может быть расположен в осевом направлении Х-Х снаружи от первого радиального подшипника 110.
Первый радиальный подшипник 110 может быть уплотнен первым уплотнением 150 на внутреннем (в осевом направлении Х-Х) конце первого радиального подшипника 110. Первое уплотнение 150 может работать по наружной поверхности гребного вала 30 или по вкладышу, предусмотренному на наружной поверхности гребного вала 30. Первое уплотнение может быть расположено с примыканием к внутренней (в осевом направлении Х-Х) поверхности корпуса 130, 131 первого радиального подшипника 110. Первое уплотнение 150 препятствует вытеканию смазывающей жидкости из первого радиального подшипника 110 и ее растеканию по гребному валу 30 в корпусе 20. Первое уплотнение 150 может быть съемным, так что обеспечивается доступ А1 к первому радиальному подшипнику 110 от наружного (в осевом направлении Х-Х) конца корпуса 130, 131 первого радиального подшипника 110 для обслуживания и/или замены первого радиального подшипника 110.
Первый радиальный подшипник 110 можно обслуживать и/или заменять в осевом направлении А1 изнутри корпуса 20, когда снято первое уплотнение 150. Таким образом, конструкция первого радиального подшипника 110 может быть такова, что позволяет проводить обслуживание и/или замену первого радиального подшипника 110 в осевом направлении А1 изнутри корпуса 20.
Однако, первый радиальный подшипник 110 мог бы иметь такую конструкцию, что обслуживание и/или замену первого радиального подшипника 110 можно было бы выполнять в радиальном направлении R1 от радиально наружной поверхности первого корпуса 130 подшипника изнутри корпуса 20. Тогда доступ к первому радиальному подшипнику 110 мог бы быть обеспечен от радиально наружной поверхности первого корпуса 130 подшипника. Тогда конструкция первого радиального подшипника 110 была бы таковой, чтобы было возможным обслуживание и/или замена первого радиального подшипника 110 в радиальном направлении R1. Между радиально наружной поверхностью корпуса 131, 130 первого радиального подшипника 110 и корпусом 20 имеется достаточно свободного пространства, так что радиальный доступ к первому радиальному подшипнику 110 возможен.
Первый проход Р1 ведет от опорного рычага 25 к первой опоре 100 внутри корпуса 20, обеспечивая доступ к первой опоре 100. Первый радиальный подшипник 110 можно заменять и/или обслуживать в осевом направлении изнутри корпуса 20. Первый упорный подшипник 120 можно обслуживать в радиальном направлении изнутри корпуса 20. Таким образом, первую опору 100 в целом можно заменять и/или обслуживать изнутри корпуса 20. Таким образом, для обслуживания первой опоры 100 не требуется постановка судна в сухой док.
Фиг. 3 изображает вторую опору в разрезе.
Вторая опора 200 может содержать второй радиальный подшипник 210. Второй радиальный подшипник 210 может являться подшипником скольжения. Второй радиальный подшипник 210 может содержать первый опорный элемент 211, окружающий гребной вал 30. Первый опорный элемент 211 может быть неподвижным. Гребной вал 30 может вращаться внутри первого опорного элемента 211. Первый опорный элемент 211 может содержать рабочую (несущую) поверхность 212, расположенную вплотную к наружной поверхности гребного вала 30. Между наружной поверхностью гребного вала 30 и рабочей поверхностью 212 может быть использована смазка. Первый опорный элемент 211 может быть выполнен в виде цилиндрического кольца, содержащего два или более сегментов окружности, которые образуют цилиндрическое кольцо. Сегменты окружности могут быть расположены с примыканием друг к другу, так чтобы образовался цилиндр. Рабочая поверхность 212 может проходить вдоль внутренней поверхности цилиндрического кольца. Рабочая поверхность может быть образована сегментами окружности, расположенными так, чтобы противоположные края соседних сегментов окружности соединялись друг с другом, или так, чтобы противоположные края соседних сегментов окружности находились на определенном угловом расстоянии друг от друга.
Первый опорный элемент 211 может поддерживаться во втором опорном элементе 213, который окружает первый опорный элемент 211. Наружная поверхность первого опорного элемента 211 может иметь выпуклую форму, а второй опорный элемент 213 может иметь вогнутую форму. Выпуклая часть первого опорного элемента 211 может входить в вогнутую часть второго опорного элемента 213. Первый опорный элемент 211 и второй опорный элемент 213 могут таким образом двигаться друг относительно друга по указанным криволинейным поверхностям, когда происходит изгиб гребного вала 30. Второй опорный элемент 213 может быть закреплен в корпусе 230 подшипника. Корпус 230 подшипника может быть закреплен на опорных конструкциях корпуса 20.
Второй радиальный подшипник 210 может быть уплотнен вторым уплотнением 250 на внутреннем (в осевом направлении Х-Х) конце второго радиального подшипника 210. Второе уплотнение 250 может работать по наружной поверхности гребного вала 30 или по вкладышу, предусмотренному на наружной поверхности гребного вала 30. Второй радиальный подшипник 210 может быть дополнительно уплотнен третьим уплотнением 260 на наружном (в осевом направлении Х-Х) конце второго радиального подшипника 210. Третье уплотнение 260 может работать по наружной поверхности гребного вала 30 или по вкладышу, предусмотренному на наружной поверхности гребного вала 30. Второе уплотнение 250 и третье уплотнение 260 препятствуют вытеканию смазывающей жидкости из второго радиального подшипника 210 и ее растеканию по гребному валу 30 в корпусе 20, и/или вытеканию в море. Второе уплотнение 250 и третье уплотнение 260 могут быть съемными. Снятие второго уплотнения 250 обеспечивает доступ A3 ко второму радиальному подшипнику 210 в осевом направлении Х-Х изнутри корпуса 20. Снятие третьего уплотнения 260 обеспечивает доступ А4 ко второму радиальному подшипнику 210 в осевом направлении Х-Х снаружи корпуса 20 с целью обслуживания и/или замены второго радиального подшипника 210.
Снятие второго уплотнения 250 дает возможность выполнять обслуживание и/или замену второго радиального подшипника 210 в осевом направлении Х-Х изнутри корпуса 20. При этом для замены второго радиального подшипника 210 постановка судна в сухой док не потребуется.
Снятие третьего уплотнения 260 дает возможность выполнять обслуживание и/или замену второго радиального подшипника 210 в осевом направлении Х-Х снаружи корпуса 20. Это можно выполнять во время постановки судна в сухой док.
Вместо того, чтобы второй радиальный подшипник 210 оснащать уплотнениями 250, 260 с обеих сторон (в осевом направлении Х-Х), указанный подшипник можно было бы оснастить только уплотнением 250 на внутренней (в осевом направлении Х-Х) стороне второго радиального подшипника 210, или только уплотнением 260 на наружной (в осевом направлении Х-Х) стороне второго радиального подшипника 210. Доступ ко второму радиальному подшипнику 210 был бы возможен в осевом направлении Х-Х только изнутри корпуса 20 или только снаружи корпуса 20.
Второй радиальный подшипник 210 мог бы иметь такую конструкцию, что обслуживание и/или замену второго радиального подшипника 210 можно было бы выполнять в радиальном направлении. Тогда потребовалось бы обеспечить доступ ко второму радиальному подшипнику 210 в радиальном направлении. В опорных конструкциях корпуса 230 подшипника можно было бы устроить люк, обеспечивающий осевой проход в опорные конструкции корпуса 230 подшипника.
Второй проход Р2 ведет от опорного рычага 25 ко второй опоре 200 внутри корпуса 20, обеспечивая доступ ко второй опоре 200. Замена и/или обслуживание второй опоры 200 может быть выполнено в осевом направлении и/или в радиальном направлении изнутри корпуса 20. Таким образом, для замены и/или обслуживания второй опоры 200 не требуется постановка судна в сухой док.
Фиг. 4 и 5 изображают радиальные подшипники в разрезе.
Радиальные подшипники, изображенные на фиг. 4 и 5, могут являться подшипниками скольжения.
На фиг. 4 изображен радиальный подшипник, в котором рабочая поверхность 112 сформирована цилиндрической поверхностью внутри первого опорного элемента 111. Цилиндрическая рабочая поверхность 112 может состоять из двух половинок цилиндра. Конструкция радиального подшипника дает возможность выполнять обслуживание и/или замену радиального подшипника в осевом (Х-Х) направлении вдоль гребного вала 30.
На фиг. 5 изображен радиальный подшипник, в котором рабочая поверхность 112 сформирована из сегментов окружности, внутри первого опорного элемента 111. Первый опорный элемент 111 может содержать люк 111А, через который можно производить замену рабочих поверхностей 112. Во время осуществления замены и/или обслуживания подшипник может быть повернут, как барабан револьвера, чтобы можно было выполнять замену рабочих поверхностей в радиальном направлении через люк. Конструкция радиального подшипника дает возможность выполнять обслуживание или замену радиального подшипника со стороны радиально наружной поверхности корпуса подшипника.
Замена и/или обслуживание радиального подшипника могут быть выполнены в радиальном направлении изнутри корпуса 20. Элементы скольжения (башмаки) в форме сегментов окружности, которые находятся внутри подшипника, можно заменять и/или обслуживать в радиальном направлении изнутри корпуса 20. Радиальный подшипник может представлять собой подшипник револьверного типа. На поверхности корпуса радиального подшипника может быть предусмотрен люк обслуживания. Люк обслуживания может открывать сегмент радиальной поверхности корпуса радиального подшипника и обеспечивать доступ к элементам скольжения в форме сегментов окружности, которые находятся внутри подшипника. Затем радиальный подшипник можно поворачивать, как барабан револьвера, чтобы один за другим извлекать элементы скольжения в форме сегментов окружности из радиального подшипника. Таким же способом, один за другим могут быть вставлены новые элементы скольжения в форме сегментов окружности.
Фиг. 6 изображает упорный подшипник в разрезе.
Первый упорный подшипник 120 может содержать кольцо 121, выступающее радиально наружу от гребного вала 30. Кольцо 121 может быть прочно прикреплено к гребному валу 30. Таким образом, кольцо 121 может вращаться вместе с гребным валом 30. Кольцо 121 может содержать две противоположный боковые поверхности 121А, 121В. Каждая боковая поверхность 121А, 121В может опираться на элемент 122, 123 скольжения. Элементы 122, 123 скольжения удерживают кольцо 121 и тем самым гребной вал 30 в надлежащем осевом положении. Элементы 122, 123 скольжения могут быть оснащены рабочей поверхностью, скользящей по боковым поверхностям 121А, 121В кольца 121.
Элементы 122, 123 скольжения могут быть закреплены на корпусе 130, 132 подшипника. Корпус 130, 132 подшипника может быть жестко закреплен в корпусе 20. Относительно наружной поверхности гребного вала 30 корпус 130, 132 подшипника может быть уплотнен с противоположных в осевом направлении сторон посредством уплотнений 124, 125. Уплотнения 124, 125 препятствуют вытеканию смазывающей жидкости из первого упорного подшипника 120, и ее распространению по наружной поверхности гребного вала 30.
Элементы 122, 123 скольжения могут иметь цилиндрическую форму. Замена и/или обслуживание первого упорного подшипника 120 может производиться в радиальном направлении изнутри корпуса 20. Элементы 122, 123 скольжения можно заменять и/или обслуживать в радиальном направлении изнутри корпуса 20. Первый упорный подшипник 120 может представлять собой подшипник револьверного типа. На радиальной поверхности корпуса первого упорного подшипника 120 может быть предусмотрен люк обслуживания. Люк обслуживания может открывать сегмент радиальной поверхности корпуса первого упорного подшипника 120, и обеспечивать доступ к элементам 122, 123 скольжения внутри первого упорного подшипника 120. Тогда первый упорный подшипник 120 можно поворачивать, как барабан револьвера, чтобы один за другим извлекать элементы 122, 123 скольжения из первого упорного подшипника 120. Таким же способом, один за другим в упорный подшипник могут быть вставлены новые элементы 122, 123 скольжения.
В первый упорный подшипник 120 может быть направлена смазывающая жидкость, чтобы обеспечить смазку между элементами 122, 123 скольжения и боковыми поверхностями 121А, 121В кольца 121.
На чертежах показан вариант осуществления изобретения, в котором первая опора 100 расположена на первом (в осевом направлении Х-Х) конце Е1 корпуса 20, а вторая опора 200 расположена на втором (в осевом направлении Х-Х) конце Е2 корпуса 20. Данный вариант осуществления является предпочтительным. Форма корпуса 20 может быть оптимизирована, и наружный периметр корпуса 20 выдержан небольшого размера в передней части движительной установки, т.е. у второго конца Е2 корпуса 20.
Однако, ситуация могла бы быть обратной, при которой первая опора 100 была бы расположена у второго конца Е2 корпуса 20, а вторая опора 200 была бы расположена на первом конце Е1 корпуса 20. В данном варианте осуществления первый радиальный подшипник 110 все равно был бы расположен в осевом направлении Х-Х внутрь относительно первого упорного подшипника 120.
На чертежах показан вариант осуществления изобретения, в котором гребной винт 40 присутствует только снаружи одного конца корпуса 20, т.е. снаружи второго конца Е2 корпуса 20. Данный вариант является предпочтительным. Однако, возможен вариант, при котором гребные винты присутствуют снаружи обоих концов корпуса 20, т.е. один гребной винт 40 снаружи первого конца Е1 корпуса 20, и один гребной винт 40 снаружи второго конца Е2 корпуса 20.
На чертежах показан вариант осуществления изобретения, в котором первый радиальный подшипник 110 и первый упорный подшипник 120 размещены в общем корпусе 130 первых подшипников. Данный вариант является предпочтительным. Однако, вместо этого первый радиальный подшипник 110 и первый упорный подшипник 120 могли бы быть размещены в отдельных корпусах 131, 132.
Первый радиальный подшипник 110 и второй радиальный подшипник 210 могут являться подшипниками скольжения.
На чертежах показан вариант осуществления изобретения, в котором гребной винт 40 является тянущим винтом. Изобретение также относится и ситуации, когда гребной винт40 является толкающим винтом.
На чертежах показан вариант осуществления изобретения, в котором гребной винт 40 является одиночным. Изобретение также относится и к ситуации, при которой гребной винт 40 образован двумя или более гребными винтами, например, двумя встречно вращающимися гребными винтами.
На чертежах показан вариант осуществления изобретения, в котором гребной винт 40 свободно вращается в морской воде. Гребной винт 40 естественно может быть окружен упорным кольцом.
Настоящее изобретение и варианты его осуществления не ограничены вышеприведенными примерами, но могут быть изменены в рамках объема изобретения в соответствии с формулой изобретения.
Реферат
Изобретение относится к судовой движительной установке. Движительная установка содержит корпус, который закреплен на судне. В корпусе проходит гребной вал, который поддерживается с возможностью вращения посредством первой и второй опор. Гребной винт прикреплен по меньшей мере к одному концу гребного вала. Первая опора содержит первый радиальный подшипник и первый упорный подшипник. Первый радиальный подшипник является подшипником скольжения, расположенным в осевом направлении внутри первого упорного подшипника. Первая опора расположена на первом конце корпуса, а вторая опора расположена на втором конце корпуса, или наоборот. Достигается удобство в обслуживании или замене подшипников изнутри корпуса судна. 2 н. и 13 з.п. ф-лы, 6 ил.

Формула
Документы, цитированные в отчёте о поиске
Силовая установка
Комментарии