Движительная установка для морского судна и морское судно, содержащее движительную установку данного типа - RU2622168C2
Код документа: RU2622168C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к движительной установке для рулевого управления и приведения в движение в направлении вперед или назад морского суда, предназначенного для эксплуатации в свободной от льда воде и в ледовых условиях, например ледокола, танкера, грузового или контейнерного судна или аналогичного транспортного судна, содержащего группу поворотных движителей. Предлагаемое изобретение относится также к морскому судну, предназначенному для эксплуатации в свободной от льда воде и в ледовых условиях и имеющему такую движительную установку.
УРОВЕНЬ ТЕХНИКИ
В ряде морских судов используется движитель, который имеет рулевое устройство, выполненное с возможностью направления гребного винта и его тяги в различных направлениях. Подобные поворотные движители могут использоваться, таким образом, как для рулевого управления, так и для приведения в движение, что, таким образом, устраняет необходимость в рулях и кормовых туннельных подруливающих устройствах. Кроме этого подобные поворотные движители доказали свою эффективность в связи с раскалыванием льда. Поворотный движитель содержит кожух со стойкой и расположен в виде отдельного блока снаружи корпуса судна, причем указанная стойка соединена с рулевым устройством внутри корпуса судна. С одного конца кожуха или с двух его концов закреплен гребной винт. Двигатель для привода гребного винта в движение может быть расположен внутри кожуха или внутри корпуса судна. Если двигатель расположен внутри кожуха, то двигатель обычно представляет собой электродвигатель, и такой поворотный движитель с электродвигателем внутри кожуха обычно называется поворотной электрической винторулевой колонкой. Если двигатель расположен внутри корпуса судна, то двигатель часто представляет собой дизельный двигатель или электрический судовой двигатель, причем передача мощности на гребной винт происходит через механическую трансмиссию, содержащую одну зубчатую передачу или группу зубчатых передач. Подобный движитель обычно называется азимутальным механическим подруливающим устройством. Поворотные движители могут быть как толкающего типа, так и тягового типа. Это означает, что гребной винт может быть расположен вверх потоку или вниз по потоку от кожуха, иметь один или два гребных винта, вращающихся в одном направлении или в противоположных направлениях, и снабжен/не снабжен соплами. Гребной винт также может быть заменен ротором насосного водометного движителя.
Из области техники известны конструкции судов, снабженных поворотными движителями для различных применений, где параметры этого движителя важны для необходимых параметров судна. В известных решениях предусмотрены конфигурации с одним или двумя поворотными движителями, расположенными вблизи одного конца судна, обычно кормовой части. В двухдвижительной конфигурации движители обычно расположены симметрично относительно продольной оси судна. В трехдвижительной конфигурации третий движитель обычно расположен на расстоянии в переднем направлении от двух кормовых движителей на продольной оси судна. Недостаток данных конфигураций состоит в том, что имеющаяся мощность ограничена вследствие ограничения размеров поворотных движителей.
Возможность безопасной эксплуатации крупных судов в узких каналах или на мелководье и особенно в ледовых условиях при наличии дрейфующего льда значительно зависит от маневренности. Одно из преимуществ поворотного движителя состоит в том, что он может быть повернут таким образом, чтобы сила тяги могла быть направлена в любом направлении для обеспечения возможности использования полной тяговой мощности для рулевого управления с обеспечением максимальной маневренности. Путем поворота поворотных движителей для придания тяге направления, противоположного перемещению судна, судно может быть быстро остановлено, что является важным свойством для безопасной эксплуатации и, в частности, при эксплуатации в караване судов за головным ледоколом. Свойства поворотного движителя также оказались полезными при разламывании льда и, в частности, для судов двойного действия (судно DAS) по концепции, описанной в патенте США №5218917, в которой судно выполнено с возможностью перемещения назад в толстом льду, причем корма выполнена с формой, пригодной для разламывания льда, и использованы поворотные движители для прорезания канала через ледяные торосы. Возможные размеры судна, в том числе судна DAS, значительно зависят от имеющейся тяги при низкой скорости, известной под названием тягового усилия при работе на швартовых, и от тяги, необходимой для привода судна в движение с максимальной скоростью на свободной от льда воде. Таким образом, важные характеристики, такие как эксплуатация во льду, а также скорость и размеры судна зависят от имеющихся в наличии размеров поворотных движителей. Размеры поворотного движителя ограничены возможностью его установки под корпусом судна вследствие физических размеров и массы движителя. Существуют также проектные ограничения, которые ограничивают наличие крупногабаритных поворотных движителей, упрочненных для льда. Требования, определенные классификационными обществами для судов, эксплуатируемых во льдах, также накладывают ограничения на имеющиеся в наличии размеры.
Для решения данной проблемы ограниченной мощности от поворотных движителей предложено гибридное решение, как описано в патентном документе US 2005/0070179 A1, в котором два установленных на удалении от центра поворотных движителя скомбинированы с обычным трансмиссионным гребным валом, установленным в центре. Данное решение имеет существенные недостатки, состоящие в том, что значительно уменьшена имеющаяся в наличии мощность для рулевого управления, поскольку центральный гребной винт, выполненный для приема значительной части мощности, зафиксирован и может только передавать тягу назад для толкательного перемещения судна вперед и в ограниченной степени в противоположном направлении при изменении направления вращения. Вследствие этого имеющаяся в наличии мощность и тяга для движения назад также уменьшена. Кроме этого при необходимости в большой тяге имеется тенденция к увеличению диаметра центрального гребного винта, что увеличивает осадку судна и необходимую балластную осадку с увеличением, таким образом, потребления топлива во время плавания с балластом. В патентном документе US 20050070179 упомянуто, теоретическим образом, что вместо центрального гребного винта может быть использована винторулевая колонка (POD). Однако данная конструкция также имеет недостатки вследствие расположения винторулевой колонки в центре.
Аналогичное решение также предложено в патентном документе US 2010/0162934 A1 для решения проблемы ограничения мощности и тягового усилия при работе на швартовых в связи с разламыванием льда и судном DAS. Недостаток в сниженной маневренности становится более значимым при эксплуатации во льдах, и радиус поворота длинного судна может стать больше приемлемого со снижением, таким образом, возможных размеров судна. Обычно большой центральный гребной винт установлен возле кормового конца для получения разумной осадки судна. При этом данный винт настолько близко подходит к поворотным движителями, что блокирует их использование в больших угловых секторах. Наличие большого гребного винта в центре также смещает два поворотных движителя друг от друга на некоторое расстояние во избежание попадания в поток от центрального гребного винта при прямолинейном перемещении в направлении вперед. Данное смещение увеличивает риск того, что большие ледяные блоки могут накапливаться и застревать в центре при прямолинейном перемещении в направлении назад во время разламывания льда.
Кроме этого из патента США №6439936 B1 известно буровое судно, в котором предусмотрено использование группы движительных установок, конструкция которых имеет, с точки зрения разламывания льда, недостатки по ряду аспектов, например, при использовании группы центрально расположенных винторулевых колонок (POD).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача данного изобретения состоит в создании поворотной движительной установки, позволяющей эксплуатировать более крупные суда или суда с высокими требованиями по мощности и тяге или с высокими требованиями по маневренности и запасу мощности для выполнения своих эксплуатационных задач безопасным и надежным образом. Причем движительная установка подходит для разламывания льда (разрушения льда, прорезания льда), а также для эксплуатации в прорезанном канале и в открытой воде, и оптимизирует как ледоразрушающую способность, так и маневренность судна, эксплуатируемого в ледовых условиях и в свободных от льда водах, что достигнуто посредством конструкции, определенной в прилагаемой формуле изобретения.
При помощи предлагаемого изобретения мощность может быть увеличена таким образом, что более крупные суда могут использоваться без увеличения физических размеров движителей, что в противном случае требует увеличенной осадки судна. Предлагаемое изобретение также повышает запас мощности и функциональную гибкость, что повышает эксплуатационные характеристики и безопасность судна в различных режимах эксплуатации.
Предлагаемое изобретение относится также к эксплуатации поворотных движителей для оптимизации возможностей судна, эксплуатируемого во льдах.
В предпочтительном варианте предлагаемого изобретения указанные движители установлены на одном конце судна. Данная установка предпочтительно выполнена на корме судна, но может быть также выполнена на носу судна. На одном судне движители также могут быть установлены на обоих его концах.
В соответствии с одним предпочтительным конструктивным аспектом предлагаемой установки при использовании группы движителей возможно избежать ситуаций, в которых происходит соударение потока от гребного винта одного движителя с другим движителем, без снижения основных эксплуатационных характеристик судна.
В соответствии с другим предпочтительным аспектом предлагаемого изобретения при движении судна вперед на повышенных скоростях для рулевого управления предпочтительно используются самые задние движители. Кроме этого углы рулевого управления движителей, расположенных в продольных положениях спереди, могут быть предпочтительно ограничены таким образом, чтобы избежать соударения потока от гребных винтов данных движителей с движителями, расположенными далее ближе к корме.
Предпочтительно используются четыре поворотных движителя, но может также использоваться большее или меньшее их количество, например, 3 или от 5 до 7. Одно преимущество использования группы движителей вместо небольшого количества движителей состоит в том, что при использовании гребного винта меньшего диаметра может быть достигнута та же общая площадь диска гребного винта. Данный признак является преимуществом при эксплуатации во льдах, заключающимся в том, что расстояние между концами лопастей гребного винта и корпусом, то есть зазор на концах лопастей гребного винта может быть сохранен бо'льшим с учетом заданной осадки судна. Данное преимущество состоит в том, что оно обеспечивает возможность меньшего взаимодействия с ровным льдом и, как следствие, меньшее напряжение в гребных винтах. Как вариант, данное преимущество может быть использовано так, что стойка движителя может быть укорочена для достижения меньших напряжений в конструкции устройства путем обеспечения меньшего рычага ледовых нагрузок, воздействующих на гребной винт и данную конструкцию. Кроме этого упрощается конструкция судов для малой осадки, и обеспечена возможность поддержания низкой балластной осадки также для более крупных судов, что уменьшает потребление топлива во время плавания с балластом без груза.
Предлагаемое изобретение обеспечивает значительные преимущества для конструкции судов, предназначенных для эксплуатации в свободных от льда водах, а также в ледовых условиях, например, для ледокола, или танкера, или грузового или контейнерного судна, или аналогичного транспортного судна. При этом возможно использовать более крупные суда, что важно для прибыльности большинства транспортных проектов, без снижения требований к маневренности и ледоразрушающей способности на мелководье. В действительности, предлагаемое изобретение обеспечивает, как описано далее в нижеследующем подробном описании и в формуле изобретения, повышенную функциональную гибкость судов, которая может использоваться для повышения ледокольных характеристик судов, выполненных по концепции DAS. Предлагаемое изобретение также повышает запас мощности для продвижения судна и рулевого управления судном со значительным увеличением, таким образом, безопасности эксплуатации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее предлагаемое изобретение описано более подробно со ссылкой на прилагаемые чертежи, на которых:
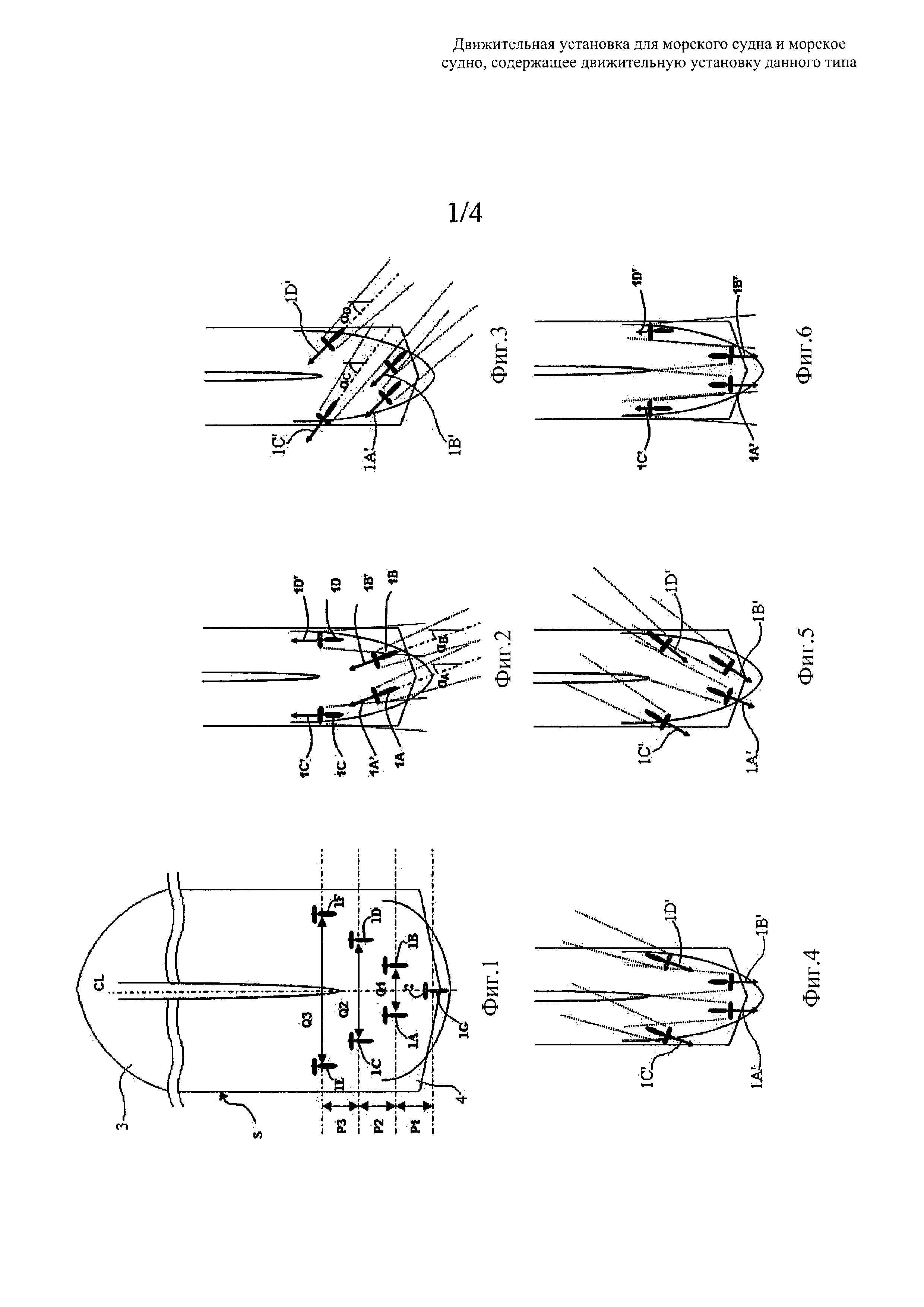
Фиг. 1 схематично изображает корму судна, имеющую симметричную предлагаемую конструкцию с семью поворотными движителями, причем все данные движители сориентированы для движения вперед;
Фиг. 2 схематично изображает другой вариант осуществления предлагаемого изобретения, в котором предусмотрено наличие четырех движителей, причем показано, как движители могут быть сориентированы для поворота при поддержании тяги для движения вперед;
фиг. 2 схематично иллюстрирует, как движители могут быть сориентированы для придания большей тяги для поворота при поддержании тяги для движения вперед;
фиг. 4 схематично иллюстрирует, как движители могут быть сориентированы для поворота при поддержании тяги для движения назад;
фиг. 5 схематично иллюстрирует, как движители могут быть сориентированы для придания большей тяги для поворота при поддержании тяги для движения назад;
фиг. 6 схематично иллюстрирует способ ориентации движителей для движения назад при разламывании льда и управлении скоростью судна;
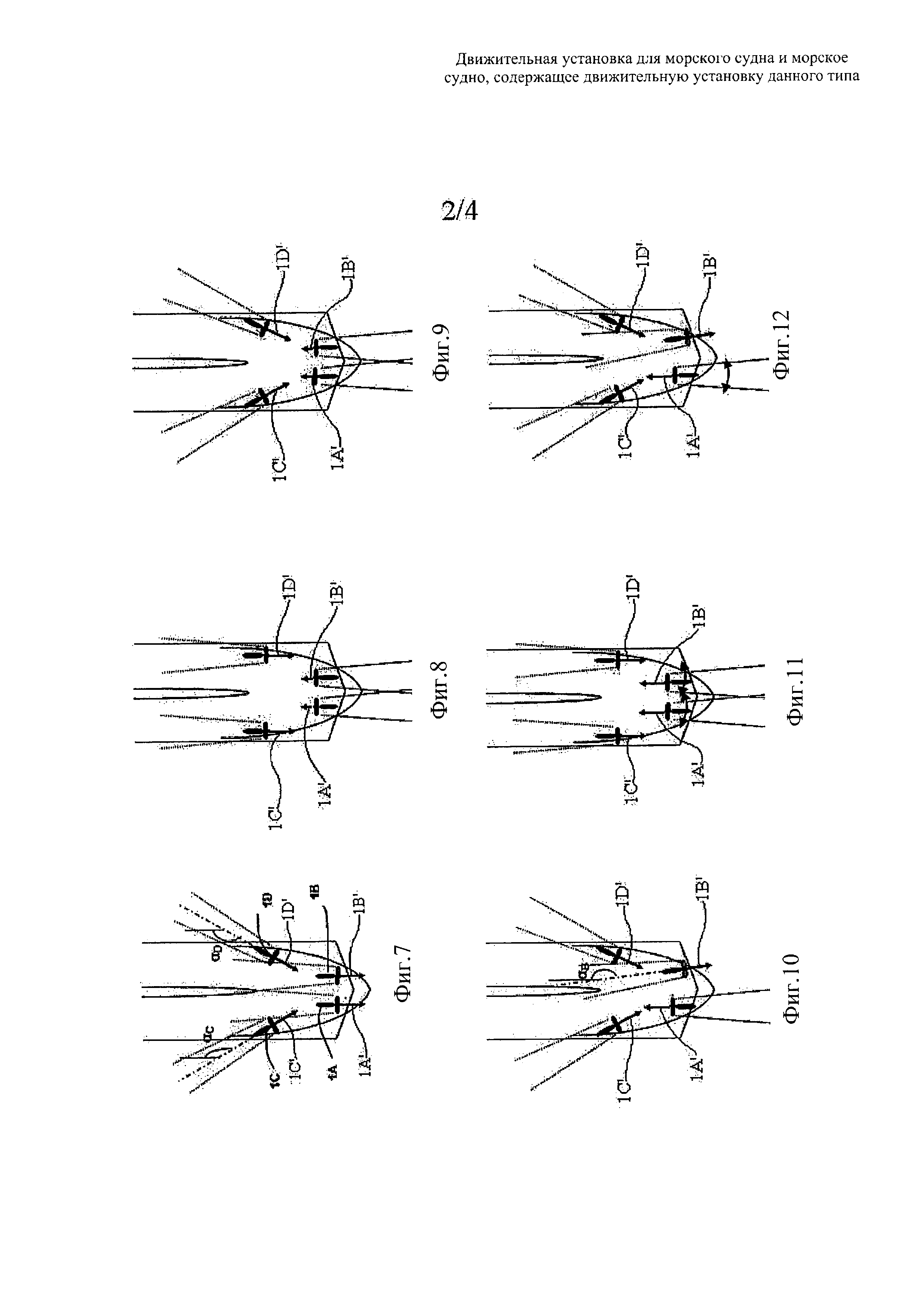
фиг. 7 схематично иллюстрирует, как самые передние движители могут быть сориентированы таким образом, что их промывочная вода направлена в наружном направлении для способствования перемещения разломанного льда от корпуса и под оставшийся лед, для уменьшения, таким образом, трения о корпус и очищения канала при одновременном расширении канала указанной промывочной водой;
фиг. 8 схематично иллюстрирует другой способ того, как движители могут быть сориентированы, при движении назад, также для одновременного разламывания льда путем направления промывочной воды от гребного винта на лед, находящийся на корме судна;
фиг. 9 схематично изображает комбинацию примеров с фиг. 7 и 8;
фиг. 10 схематично иллюстрирует другой способ того, как движители могут быть сориентированы, при движении назад, также для одновременного разламывания льда путем направления, одним движителем, промывочной воды от гребного винта на лед, причем остальные три движителя используются для расширения и очищения канала от льда и для продвижения судна назад;
фиг. 11 схематично иллюстрирует то, как подруливающие устройства могут совершать колебания вокруг своей вертикальной оси для достижения более широкого прохода при разламывании льда;
фиг. 12 схематично иллюстрирует то, как подруливающие устройства могут совершать колебания вокруг своей вертикальной оси для достижения более широкого прохода при разламывании льда для конфигурации, как в примере с фиг. 10;
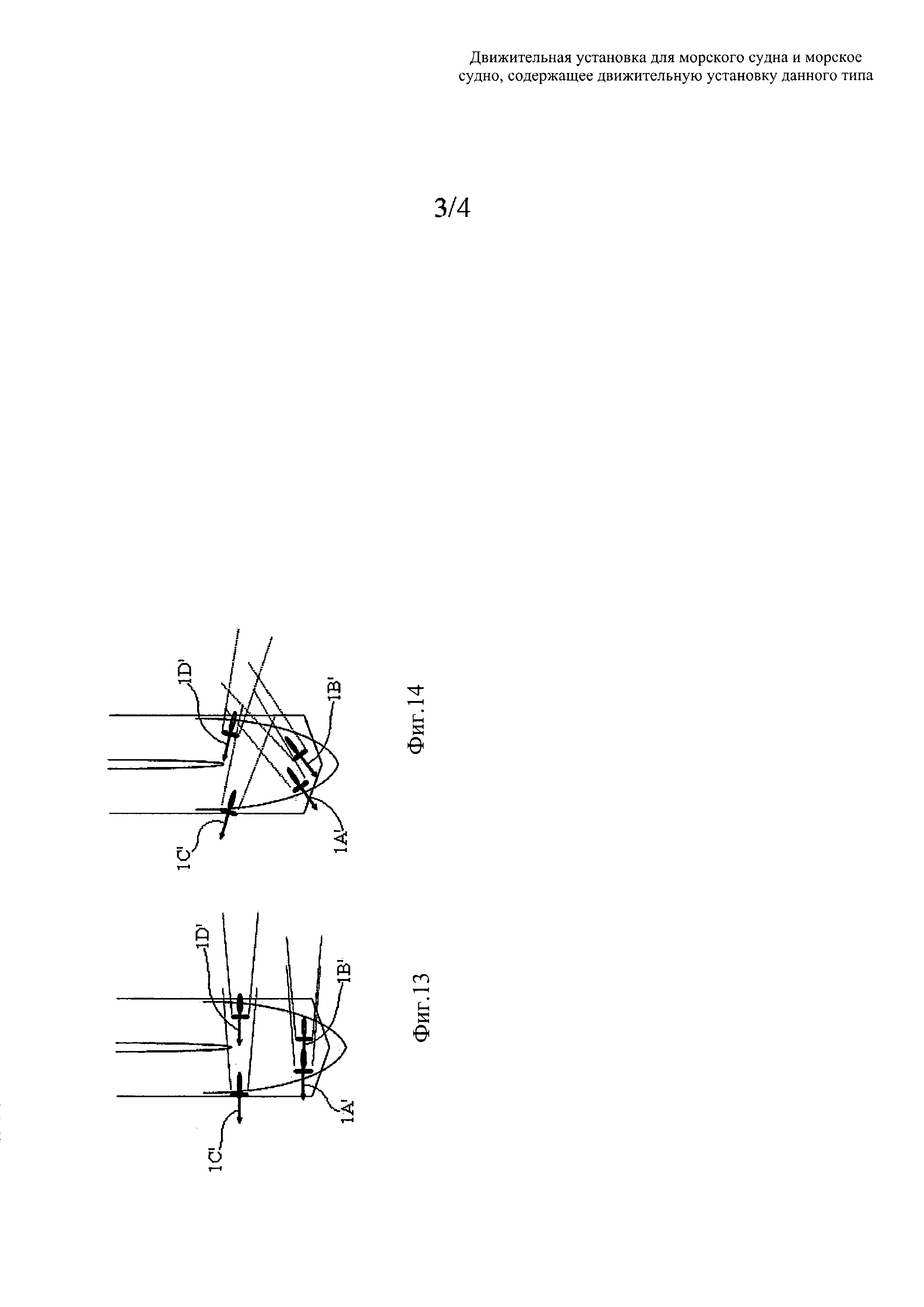
фиг. 13 схематично иллюстрирует, как движители могут использоваться для создания максимальной тяги для поворота без движительной тяги вперед или назад;
фиг. 14 схематично иллюстрирует, как движители могут быть сориентированы для придания значительной тяги для поворота без движительной тяги вперед или назад, избегая ударения потока от гребного винта о движитель, находящийся сзади;
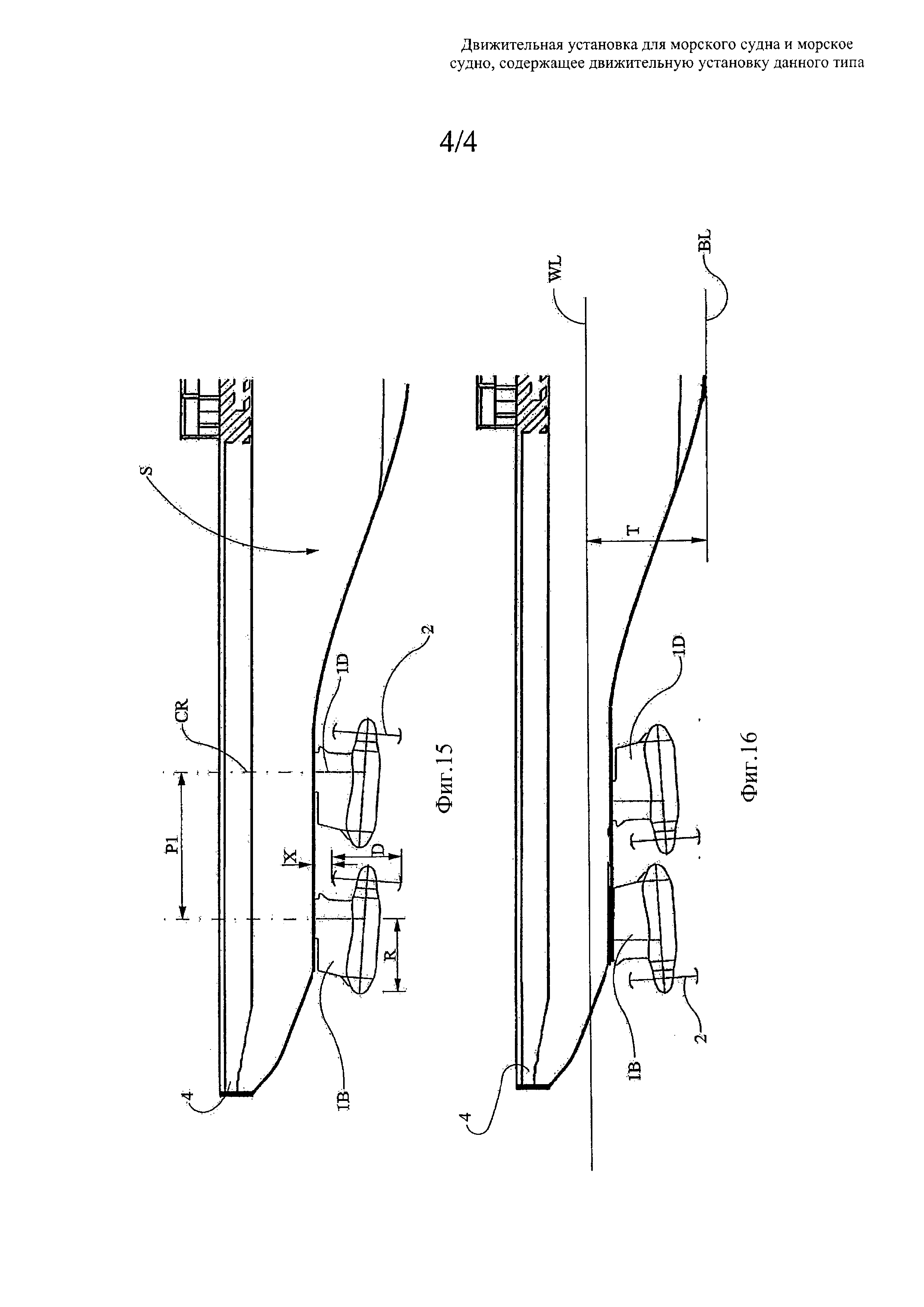
Фиг. 15 схематично изображает морское судно с четырьмя поворотными движителями, расположенными, в соответствии с предлагаемым изобретением, на конце К, известном как кормовой конец 4 судна, и сориентированными для движения вперед;
Фиг. 16 схематично изображает то же морское судно, но с движителями, сориентированными для движения назад.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1-14 схематично изображена корма 4 судна, имеющего корпус 5 и снабженного группой поворотных движителей 1A-1G, причем в соответствии с предпочтительным вариантом выполнения предлагаемого изобретения в конструкции предусмотрено V-образное групповое расположение меньших поворотных (азимутальных) движителей (вместо нескольких более крупных), например, до 7 поворотных движителей 1A-1G, на судне S.
В подробном описании и на схематичных чертежах изображены и описаны поворотные движители 1A-1G тягового типа с открытым гребным винтом на одном конце кожуха движителя, расположенные симметричным образом относительно продольной оси CL корпуса S на кормовом конце 4. Принципиальная конструкция может также использоваться для толкающих движителей или движителей со сдвоенным гребным винтом, снабженных гребными винтами, выполненными с возможностью вращения в одном направлении или в противоположных направлениях. Данная конструкция также может быть зеркально расположена на другом конце судна. При этом конструкция может быть не симметричной, а положения движителей могут быть отрегулированы индивидуально.
В соответствии с одним аспектом предлагаемого устройства группа движителей размещена так, чтобы избежать ситуаций, когда происходит соударение потока от гребного винта одного движителя с другим движителем. Данная задача может быть решена путем V-образного расположения, как изображено на фиг. 1, для конфигурации с семью движителями. В случае с нечетным количеством движителей первый движитель 1G расположен в центре возле кормового конца 4 судна. Следующие два движителя 1A, 1B расположены на определенном продольном расстоянии P1 в направлении вперед от первого движителя и на расстояниях Q1 в боковом направлении, предпочтительно симметрично, но также возможно асимметрично, от продольной оси CL судно таким образом, чтобы избежать соударения потока от гребных винтов данных движителей с первым движителем при движении в направлении вперед с высокой скоростью и обеспечить наличие достаточного зазора для возможности поворота движителей без соприкосновения друг с другом. Следующая пара движителей 1C, 1D расположена на определенном продольном расстоянии P2 в направлении вперед от первой пары 1A, 1B и в положениях Q2 на увеличенном боковом расстоянии таким образом, чтобы избежать соударения потока от гребных винтов данных движителей с первой парой движителей 1A, 1B при движении в направлении вперед с высокой скоростью. Следующие два движителя 1E, 1F расположены на другом продольном расстоянии P3 в направлении вперед и в положениях Q3 на увеличенном боковом расстоянии еще дальше в наружном направлении в сторону бортов судна.
Как изображено на фиг. 2, используется конструкция из четырех движителей (или винторулевых колонок), каждый из которых обеспечивает наличие вектора 1Aʹ-1Dʹ тяги. При четном количестве поворотных движителей первое отдельное устройство (1G на фиг. 1) удалено, и первая пара движителей перемещена ближе к кормовому концу судна, и предпочтительно движители этой пары расположены близко друг к другу. Одно преимущество использования четырех движителей вместо трех состоит в том, что при использовании меньшего диаметра D гребного винта может быть достигнута та же общая площадь поверхности гребного винта (ТА). Данный признак является преимуществом при эксплуатации во льдах, заключающимся в том, что расстояние X (как показано на фиг. 15) между концами лопастей гребного винта 2 и корпусом, то есть зазор X на концах лопастей гребного винта может быть сохранен бʹольшим с учетом заданной осадки судна. Данное преимущество состоит в том, что обеспечена возможность меньшего взаимодействия с ровным льдом и, как следствие, меньшее напряжение в гребных винтах. Кроме этого новая концепция позволяет обеспечивать неожиданную гибкость относительно эксплуатации и функционирования движительной установки, как описано в примерах далее. Это также обеспечивает возможность более низкой балластной осадки судна в свободных от льда водах, что может быть преимуществом при плавании без груза.
Другой путь использования повышенного количества движителей состоит в использовании того же диаметра для тройного решения вместо использования гребных винтов с меньшим диаметром. Посредством данной конструкции может быть достигнута повышенная общая эффективность в распределении движительной тяги по большей общей площади поверхности винта.
Данная концепция может быть использована в том, что стойка устройства создания тяги может быть укорочена для достижения меньших напряжений в конструкции устройства путем обеспечения меньшего рычага ледовых нагрузок, воздействующих на гребной винт и данную конструкцию.
На фиг. 1 изображены движители тягового типа, выполненные с возможностью тягового перемещения судна вперед. Однако могут быть также использованы движители толкающего типа, выполненные с возможностью толкательного перемещения судна вперед, или комбинация указанных обоих типов. На фиг. 1 движители расположены от кормового конца 4 и далее вперед по судну. Движители также могут быть расположены (не изображено) от носового конца и далее назад по судну. Однако, несмотря на то, что на фиг. 1 движители изображены так, что каждая боковая пара расположена в том же продольном положении и симметрично относительно продольной оси CL, в рамках предлагаемой концепции все движители, при специальном применении, могут регулироваться в своих относительных положениях.
На фиг. 1 изображена конфигурация с семью движителями. Задача изобретения решена путем V-образного расположения таким образом, что первый движитель 1G расположен в центре на продольной оси судна, предпочтительно максимально возможно ближе к кормовому концу судна на минимальном расстоянии 1R, равном максимальному радиусу поворота движителя (как изображено на фиг. 15), от граничной линии кормы таким образом, что весь движитель при повороте на 360° остается в пределах данной граничной линии. Однако данное расстояние может также составлять до 2R или более, как, например, на судне с кормовой секцией, выполненной для разламывания льда (DAS).
Однако в ряде приложений указанное расстояние может составлять также менее 1R.
Остальные движители 1A-1F расположены в боковых парах в трех продольных положениях P1-P3 или в двух продольных положениях P1-P2 для конфигурации с пятью движителями и в одном продольном положении Р1 для конфигурации с тремя движителями. Первая боковая пара 1A и 1B расположена на расстоянии P1 в направлении вперед от первого движителя, предпочтительно на расстоянии 2-3R, но может также быть расположена на большем или меньшем расстоянии. Боковое расстояние Q1 между данными движителями предпочтительно должно быть сохранено максимально малым для наличия бокового пространства для расположения следующего ряда движителей, но также достаточно протяженным во избежание ударения потоков от гребных винтов о первый движитель. Минимальное расстояние составляет 1R для того, чтобы иметь достаточный зазор для возможности поворота движителей на 360° без соприкосновения друг с другом, но также может составлять до 4R и более. Вторая боковая пара 1C и 1D расположена на расстоянии P2 в направлении вперед от первой пары, предпочтительно на расстоянии 2-3R, но может также быть расположена на большем или меньшем расстоянии. Боковое расстояние Q2 увеличено по сравнению с первой парой таким образом, чтобы избежать соударения потока от гребных винтов второй пары с первой парой движителей, предпочтительно данное расстояние увеличено до 2-4D, причем D соответствует диаметру гребного винта (как изображено на фиг. 15), но может также быть увеличено до большего или меньшего значения. Третья боковая пара 1E и 1F расположена на другом расстоянии Р3 в направлении вперед от второй пары, предпочтительно на расстоянии 2-3R, но может также быть расположена на большем или меньшем расстоянии. Боковое расстояние Q3 увеличено по сравнению со второй парой таким образом, чтобы избежать соударения потока от гребных винтов третьей пары со второй парой движителей, предпочтительно данное расстояние увеличено до 2-4D, но может также быть увеличено до большего или меньшего значения, предпочтительно, однако, не ближе 1R до борта судна.
Если необходимо четное количество поворотных движителей, то первый блок 1G внизу V-образной конфигурации может быть удален, и боковые пары движителей, две пары для конфигурации с четырьмя движителями и 3 пары для конфигурации с шестью движителями отрегулированы в своих положениях таким образом, что первая пара расположена ближе к кормовой части судна, и боковое расстояние данной пары предпочтительно уменьшено до минимального 1R, но возможно также до большего значения. При этом другие пары отрегулированы соответствующим образом согласно подробной схеме, описанной выше.
При движении судна вперед на повышенных скоростях для рулевого управления предпочтительно используются самые задние движители. При этом движители, расположенные в продольных положениях спереди, могут быть предпочтительно ограничены в углах рулевого управления таким образом, чтобы избежать соударения потока от гребных винтов данных движителей с движителями, расположенными далее к корме.
Одно преимущество использования группы движителей вместо небольшого количества движителей состоит в том, что, как указано выше, при использовании меньших диаметров D гребных винтов может быть достигнута та же общая тяга. Данный признак является преимуществом при эксплуатации во льдах и заключается в том, что может быть увеличено расстояние между концами лопастей гребного винта 2 и корпусом S. Кроме этого ледяные блоки, которые могут ударяться о гребной винт, создают меньшие ударные нагрузки на поворотную систему, если также движительные установки выполнены малыми. Кроме этого для судов, спроектированных с малой осадкой, минимальная осадка T ограничена размерами гребного винта и требуемым зазором между гребным винтом и корпусом (D+X). Таким образом, меньшие гребные винты облегчают конструирование судов с малой осадкой, что, например, необходимо в Северном Ледовитом океане и для эксплуатации на реках или в речных дельтах.
Кроме этого так называемая балластная осадка, определенная как осадка при движении судна без груза, часто зависит от требуемой глубины погружения во избежание захвата воздуха гребным винтом. При меньшем гребном винте судно может быть спроектировано с более низкой балластной осадкой, что позволяет сэкономить топливо во время плавания с балластом в открытых водах.
Поворотная способность в ледовых условиях является важной для безопасной эксплуатации судна и в значительной степени зависит от соотношения L/B длины к ширине судна. Следовательно, длинное судно более трудно поворачивать, чем короткое. В действительности, указанное соотношение ограничивает возможную длину судна, эксплуатируемого во льдах. Предлагаемое изобретение позволяет использовать всю имеющуюся в наличии силу тяги для рулевого управления, поскольку используются только поворотные движители, обладающие способностью приложения силы тяги в любом направлении, αA-αG. При наличии большего количества движителей вместе с повышенной функциональной гибкостью поворотная способность может быть улучшена, что позволяет использовать более крупные суда.
На фиг. 2 проиллюстрирован способ приложения сил рулевого управления при поддержании значительного движительного усилия в направлении вперед для конфигурации из четырех тяговых винторулевых колонок. Две самые задние винторулевые колонки 1A и 1B выставлены на углы αA-αB для придания боковой тяги, а также тяги вперед. При этом углы могут варьироваться в диапазоне ±0-90 для достижения различного уровня силы поворота. На фиг. 3 проиллюстрирован способ достижения еще большей боковой тяги путем выставления всех четырех винторулевых колонок 1A-1D на углы αA-αB=±0-90°. Максимальная боковая сила достигается, когда все движители 1A-1D установлены на углы 90° или около данного значения, как изображено на фиг. 13 и 14. В данном случае движительная тяга для движения вперед является незначительной или равна нулю, и полная сила тяги может быть использована для поворота судна на месте. На фиг. 4 и 5 проиллюстрированы аналогичные способы поворота, но при движении судна DAS назад.
Предлагаемое изобретение увеличивает запас мощности для рулевого управления и продвижения судна и, следовательно, безопасность и надежность судна. Путем использования поворотных движителей может быть выполнена аварийная остановка путем поворота всех движителей на 180° и использования полной движительной мощности для остановки судна. Данная способность особенно важна для судов, эксплуатируемых в арктических водах и, в частности, для судов, эксплуатируемых в караване за головным ледоколом.
Увеличенное количество движителей обычно увеличивает общую площадь пера руля по сравнению с конфигурацией с небольшим количеством движителей. Данный признак увеличивает стабильность курса судов и уменьшает рулевое управление во время эксплуатации в открытой воде, что в свою очередь повышает экономию топлива и снижает затраты на техническое обслуживание.
Меньшие движители более просты в управлении вследствие меньшей массы и меньших размеров, что упрощает их установку и техническое обслуживание. Меньшие устройства также более просты для проектирования в соответствии с требованиями классификационных обществ для эксплуатации в тяжелых льдах, поскольку ледовые нагрузки меньше.
Новое расположение, в конфигурациях из группы движителей, обеспечивает дополнительную эксплуатационную гибкость, которая может быть использована для улучшения разламывания льда, в частности, для судов DAS. Далее описан ряд различных случаев для конфигурации из четырех тяговых винторулевых колонок.
Как изображено на фиг. 15 и 16, винторулевые колонки 1A-1D могут быть предпочтительно установлены в кормовой секции 4 судна, имеющей гребной винт 2, выполненный с возможностью вращения вокруг своей оси в плоскости вращения данного винта. Указанный винт 2 установлен на валу (по существу известном, не изображен), выполненном с возможностью вращения вместе с винтом 2. Данный гребной винт установлен с одной стороны винторулевой колонки и выполнен с возможностью тяги винторулевой колонки вперед при вращении в своем проектном направлении и толкания винторулевой колонки в обратном направлении при изменении своего вращения на противоположное. На фиг. 15 винторулевые колонки сориентированы таким образом, что судно перемещается в переднем направлении, и поток воды от гребного винта направлен в направлении назад относительно судна.
На фиг. 16 винторулевые колонки сориентированы таким образом, что судно перемещается в заднем направлении, и поток воды от гребного винта направлен в направлении вперед относительно судна. Данный гребной винт выполнен с возможностью взаимодействия, при эксплуатации в ледовых водах, со льдом. Винторулевые колонки 1A-1D выполнены с возможностью поворота относительно корпуса морского судна S таким образом, что установка способна перемещать морское судно S в различных направлениях. При этом винторулевые колонки 1A-1D выполнены с возможностью управления отдельно друг от друга как по направлению рулевого управления, так и по вырабатываемой движительной тяге. Управление устройствами может быть выполнено так, чтобы достигалось оптимальное транспортирование и разламывание льда.
Гребной винт 2 во многих приложениях может иметь диаметр, который заключен в диапазоне, например, предпочтительно в пределах 0,5-8 м, более предпочтительно в диапазоне 1-6 м. Данный диаметр может также превышать 8 м. В ряде случае гребные винты, используемые для разламывания льда (разрушения льда, прорезания льда), могут, допустимо, даже иметь диаметр до 10 м или более, и предлагаемые движительные установки могут, допустимо, иметь подобные крупные гребные винты. Благодаря использованию более трех движительных установок 1A-1D диаметр D гребного винта может быть сохранен относительно малым для достижения необходимой полной осадки TA, например, путем обеспечения достаточно большого расстояния X между концами лопастей гребного винта 2 и корпусом, то есть зазора X на концах лопастей гребного винта, например, больше 0,3 D, предпочтительно больше 0,4 D или в ряде случаев еще более предпочтительно больше 0,5 D или более, или вместо данных характеристик обеспечивать любые другие преимущества/возможности, указанные выше. Движительные установки 1A-1D могут представлять собой поворотное подруливающее устройство с внутренним электродвигателем (по существу известным, не изображен), или данная установка может представлять собой поворотное подруливающее устройство, приводимое в движение через трансмиссию дизельным двигателем внутри корпуса или дизель-электрическим двигателем (по существу известным, не изображен). Трансмиссия может представлять собой L-образный привод или Z-образный привод (по существу известный, не изображен).
Лопасти гребного винта 2 могут иметь переменный шаг. Движительная установка 1 может быть также спроектирована для изменяемой скорости гребного винта 3. Гребные винты могут быть также оборудованы ледокольной ступицей, как описано в патентной заявке 1051155-8, для дополнительного улучшения ледоразрушающей способности при встрече, например, с ледяными торосами.
Пример 1
При эксплуатации в тяжелых льдах с одно- или двухдвижительной установкой, в частности, при прорезании льда судном DAS, существует риск застревания гребных винтов во льду. Для высвобождения из подобной ситуации требуется значительное завышение размеров движителей относительно имеющегося в наличии крутящего момента на валу и/или поворотного крутящего момента. Для установки с группой движителей риск одновременного застревания всех движителей является пренебрежимо малым. Поэтому в случае, если самый(-ые) задний(-ие) движитель(-и) застрянет(-ут), то другие движители могут быть использованы для тягового вытаскивания судна в направлении изо льда для высвобождения, таким образом, самых задних движителей изо льда.
При использовании самых задних движителей для прохождения через торос предусмотрена возможность уравновешивания тяги назад при помощи расположенных спереди движителей для уменьшения риска застревания движителей и оптимизации скорости прохождения. На фиг. 6 изображена ситуация, когда самые задние движители используются для проникновения через ледовое образование, причем самые передние движители используются для управления скоростью судна через ледовое образование без необходимости замедления движителей, проникающих в лед. При этом движители 1C и 1D вырабатывают тягу 1Cʹ и 1Dʹ, используемую для замедления судна таким образом, что скорость проникновения в ледовое образование оптимизирована.
Пример 2
Известно, что газовые двигатели определенных типов, используемые для приведения в действие генераторов для вырабатывания электрической энергии на борту судна, являются чувствительными к колебаниям нагрузки, так что если гребной винт вращается с меньшим количеством оборотов в минуту при проникновении в ледовое образование, потребление мощности снижается очень быстро, и существует риск создания, таким образом, аварийного перерыва в электроснабжении на борту судна. При конфигурации с группой движителей колебание нагрузки, при вращении движителя с меньшим количеством оборотов в минуту, будет меньше, поскольку мощность на каждом движителе меньше. Однако колебание нагрузки может быть дополнительно уменьшено при эксплуатации в соответствии с фиг. 6. Если количество оборотов в минуту передних винторулевых колонок возрастает при снижении количества оборотов в минуту самых задних движителей, то колебание мощности в системе также снижено. Данный метод управления движителями имеет двойной эффект высвобождения самых задних движителей таким образом, что они могут быстро восстановить количество оборотов в минуту.
Для специалиста в данной области техники очевидно, что отдельный способ, описанный в двух вышеприведенных абзацах, не ограничен применением в связи с поворотными движителями, но может быть также использован в связи с гибридными движительными установками, имеющими один или более зафиксированный движитель. Предусматривается, что может быть необходима отдельная защита, например, путем подачи выделенной заявки, в которой формула изобретения также содержит зафиксированные движители.
Пример 3
На фиг. 7 передние винторулевые колонки 1C и 1D повернуты вовнутрь на углы αC-αD для транспортирования льда, перемолотого самыми задними винторулевыми колонками 1A и 1B, с удалением от корпуса судна и для уменьшения трения без функционирования в прямом потоке от гребных винтов самых задних винторулевых колонок. Уменьшенное трение между льдом и корпусом судна означает уменьшенную мощность для приведения судна в движение. Причем промывочная вода от самых передних винторулевых колонок, направляемая к боковым сторонам прорезанного канала, разрушает лед на боковых сторонах и способствует, таким образом, расширению канала. Данный способ эксплуатации также может использоваться для очищения канала от глыбового льда, поскольку передние винторулевые колонки способны выталкивать разломанный лед наружу и под оставшееся ледяное поле.
Пример 4
На фиг. 8 проиллюстрирован другой способ эксплуатации путем использования самых задних винторулевых колонок 1A и 1B с направлением вперед векторов 1Aʹ и 1Bʹ тяги данных колонок. При этом промывочная вода от гребного винта направляется на лед, находящийся на корме судна, для разламывания данного льда. В свою очередь, векторы 1Cʹ и 1Dʹ самых передних винторулевых колонок 1C и 1D могут быть направлены в противоположном направлении, и способны, при более высокой тяге, чем в самых задних движителях 1A и 1B, вытягивать судно сначала кормой через разломанный лед. Самые передние винторулевые колонки также могут быть направлены вовнутрь, как изображено на фиг. 9, так, чтобы удалять лед от корпуса и расширять канал, как изображено в примере 3.
Пример 5
Как показано на фиг. 10, как вариант (относительно фиг. 9), только одна колонка 1A (или 1B) из самых задних винторулевых колонок может иметь вектор 1Aʹ (или 1Bʹ) тяги, направленный вперед, с выбросом реактивной струи в сторону кормы для разламывания льда. При этом другая колонка 1B (или 1A) направлена в сторону кормы для тяги судна назад вместе с самым передними винторулевыми колонками 1C и 1D, направленными либо напрямую назад, как показано на фиг. 7, или с вектором тяги 1Bʹ (или 1Aʹ), направленным вовнутрь под углом αB, как показано на фиг. 10. Есть много других способов комбинирования углов рулевого управления и тяги между четырьмя движителями в конфигурации с четырьмя движителями для достижения различных характеристик судна в маневренности и разламывании льда. Во всех комбинациях тяга должна быть уравновешена между движителями для достижения заданных характеристик при повороте, разрезании льда или эксплуатации судна в открытых водах. Данные комбинации могут быть выполнены путем подбора различных размеров или мощностей движителей или путем выбора различных типов гребных винтов (например, различные установки шага или диаметры) движителей, или просто путем установки мощности, передаваемой на каждый в отдельности движитель в каждый момент времени, а также, конечно, путем комбинирования одной или более из вышеуказанных характеристик.
Следует также учесть, что установка углов движителей не обязательно должна быть статичной в рамках режима эксплуатации, а может непрерывно регулироваться. При эксплуатации в примере, изображенном на фиг. 8 или 10, колебание угла αA-αB рулевого управления самых передних движителей может происходить от борта к борту в диапазоне +/-60 градусов. Однако может также быть предпочтителен меньший угол, например, +/-40 градусов или даже +/-5 градусов. Указанный угол может быть также больше, например +/-90 градусов. Угловое колебание может также отличаться между движителями, расположенными по левому и по правому бортам, например, угловое колебание может составлять от +10 до -40 градусов или наоборот или любой другой угол рулевого управления. Колебание рулевого управления движителей между движителями, расположенными по левому и по правому бортам, также может быть либо симметричным (как изображено на фиг. 11), либо асимметричным. Колебание движителей также может быть выполнено с возможностью управления полностью независимо друг от друга для оптимизации ледокольных характеристик. Может быть также предусмотрен вариант, в котором один или более движитель имеет фиксированный угол, например, 0 градусов или любой другой угол рулевого управления, например, +5 градусов или -10 градусов, причем другой(-ие) движитель(-ли) имеют колебательное перемещение рулевого управления.
Предлагаемое изобретение не ограничено изображенным вариантом выполнения, и в рамках объема правовой охраны, заявленным в независимом пункте прилагаемой формулы изобретения, возможно внесение ряда вариаций. Например, один движитель или группа движителей могут регулироваться в своих боковых и/или продольных положениях таким образом, что ряд боковых пар или все боковые пары являются асимметричным в своих боковых и/или продольных положениях. Кроме этого первый движитель 1G может быть расположен на удалении от продольной оси CL.
Кроме этого предусматривается, что поворотные движители могут представлять собой механические движители или электрические винторулевые колонки, выполненные как по тяговому типу, так и по толкающему типу. Причем один или два гребных винта или ротора насосного водометного движителя расположены на одном или на обоих концах движителя и выполнены с возможностью вращения в одном направлении или в противоположных направлениях и снабжены/не снабжены соплами.
Помимо этого, поворотные движители могут иметь гребные винты различных диаметров и/или конструкций, или двигатели различных размеров, или стойки различной длины или могут представлять собой комбинацию движителей различных типов. Например, движители, расположенные на расстояниях ближе к носу, могут быть меньше, чем самые задние движители, что облегчает установку или выполняется по другим эксплуатационным причинам. Данные движители могут быть сконструированы различно, то есть расположенные впереди движители могут иметь гребные винты, выполненные для оптимальной эффективности в открытых водах, а самые задние винты оптимизированы для взаимодействия со льдом.
Реферат
Изобретение относится к судостроению, а именно к движительным установкам. Движительная установка для эксплуатации в ледовых условиях и в свободных от льда водах для морского судна, имеющего корпус (S) с диаметральной линией (CL), проходящей между его носовым концом (3) и кормовым концом (4). Движительная установка содержит группу поворотных движителей (1A-1D), имеющих центр (CR) поворота и максимальное боковое расстояние (R), на которое они выступают от указанного центра (CR) поворота, и предпочтительно имеет по меньшей мере один поворотный движитель (1A-1D) с винтом (2), выполненным с возможностью функционирования во льду. Движительная установка содержит по меньшей мере три поворотных подруливающих устройства (1A, 1B, 1G), расположенных вблизи одного конца (3, 4) корпуса (S) судна, в том числе по меньшей мере одну пару (1A, 1B) подруливающих устройств, расположенных по существу симметрично относительно указанной диаметральной линии (CL), на поперечной линии (T2) относительно указанной диаметральной линии (CL), на первом расстоянии (Q1) друг от друга, и по меньшей мере одно поворотное подруливающее устройство (1G), расположенное ближе к указанному концу (3, 4) и указанной диаметральной линии (CL) на продольном расстоянии (P1) от указанной поперечной линии. Достигается повышение функциональной гибкости судов и повышение запаса мощности для продвижения судна и рулевого управления судном, безопасность эксплуатации. 5 н. и 23 з.п. ф-лы, 16 ил., 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Ледокольное судно
Комментарии