Гребной лопастной движитель подводного аппарата - RU209324U1
Код документа: RU209324U1
Чертежи
Описание
Полезная модель относится к гребным движителям подводных объектов, в частности, к движителям невращающегося типа.
Гребные движители такого типа работают создавая упор за счет силы сопротивления пластины - лопатки, совершающей возвратно-поступательные движения в направлении перемещения объекта.
Движитель представляет собой систему продольно перемещаемых лопастей, которые циклично выполняют гребок, возвратный ход и разворот лопатки. При выполнении гребка лопасть перемещается в сторону обратную направлению тяги и ориентирована поперек потока водной среды. На возвратном ходу лопасть ориентирована по потоку для создания минимального сопротивления.
Известно устройство для передвижения в воде, содержащее педаль, шарнирно смонтированные на ней лопасти и средство связи между ними по авторскому свидетельству №506423, МПК А63В 31/10, опубл. 15.03.76. Недостатком устройства является сложность конструкции, и отсутствие возможности создания реверса.
Наиболее близким аналогом является гребной движитель по патенту RU №85145, МПК В63Н 1/32, опубл. 27.07.2009 г., содержащий две пары пластин, каждая из которых шарнирно закреплена на оси штока по передней кромке, совершающих возвратно-поступательное движение в направлении перемещения объекта в противофазе. Недостатком такой конструкции является низкая маневренность и отсутствие реверса.
Техническим результатом предлагаемого гребного лопастного движителя является увеличение скорости подводного объекта за счет снижения сопротивления при холостом ходе лопасти, повышение маневренности объекта на малых скоростях хода и расширение эксплуатационных характеристик движителя за счет режима реверса.
Указанный технический результат достигается тем, что в отличие от известного технического решения, элементы движителя пластины-лопасти, создающие упор, располагаются не за кормой подводного объекта, а побортно, то есть с двух сторон корпуса, и приводятся в движение электроприводами электромоторов, работающими независимо друг от друга. Такое расположение гребных лопастей предопределяет возможность их перемещения с разными скоростями, создавая тем самым момент, поворачивающий подводный аппарат в горизонтальной плоскости. В результате аппарат сохраняет маневренность даже на скорости хода, близкой к нулю. Поворот лопасти осуществляется по заранее задаваемому закону, что приводит к более раннему повороту лопасти, а следовательно - к уменьшению сопротивления при ее холостом ходе и увеличению скорости аппарата. Изменение фазы электромоторов на противоположную, обеспечивает изменение направления тяги движителя, создавая реверс.
Полезная модель поясняется с помощью чертежей:
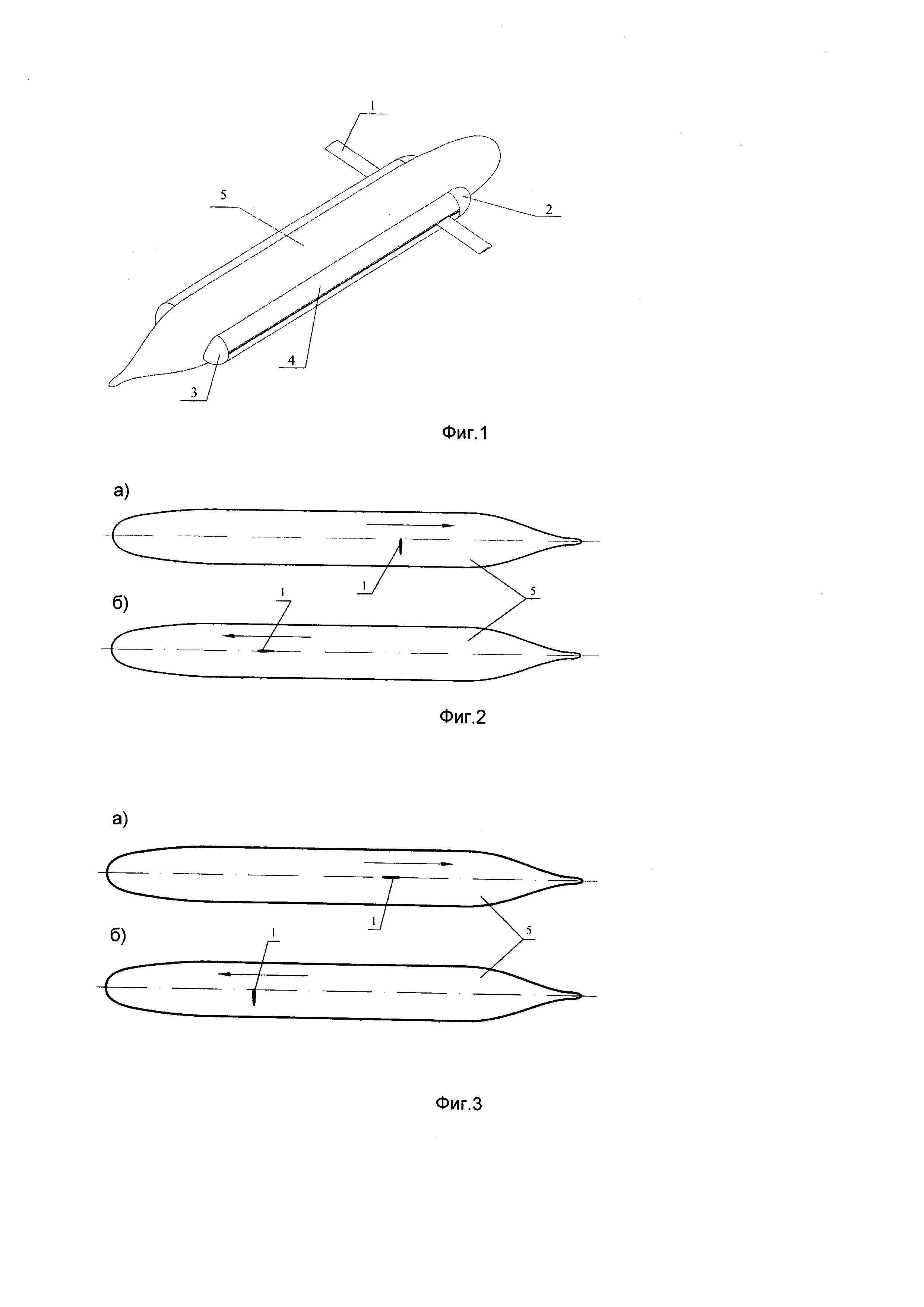
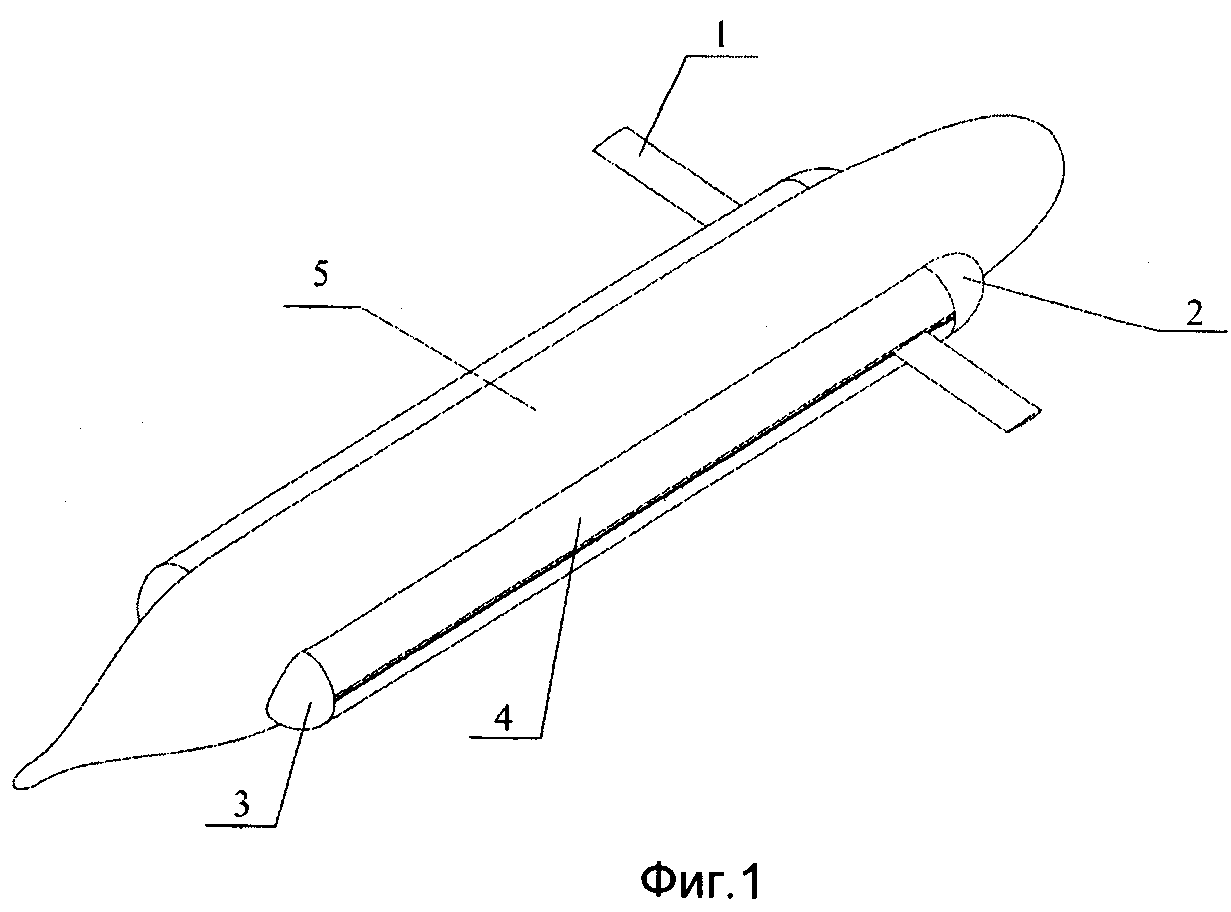
фиг. 1 - представлена схема расположения движителя;
фиг. 2 - схема движения гребных лопастей на прямом ходу:
а) из носа в корму;
б) из кормы в нос.
фиг. 3 - схема движения гребных лопастей на реверсе:
а) из носа в корму;
б) из кормы в нос.
Гребные пластины, представляющие из себя профилированные лопасти 1 располагаются с правого и левого борта подводного аппарата 5, и работают независимо друг от друга (фиг. 1). Для снижения сопротивления аппарата при движении в жидкости, механизмы движителя закрываются обтекателем, состоящим из носовой 2 и кормовой части 3, а также цилиндрической вставки 4 с пазом для вала пластины-лопасти 1. (На фигурах 2 и 3 носовая часть подводного аппарата расположена слева, а корма -справа)
Каждая пластина - лопасть совершает периодические продольные поступательные колебания в направлении движения аппарата (фиг. 2). Закон продольных поступательных колебаний лопасти выбирается таким образом, чтобы обеспечить максимальную эффективность движителя. В районе носовой 2 и кормовой 3 оконечности лопасть совершает поворот на 90 градусов. Угол поворота лопасти описывается периодическим законом подобранным таким образом, чтобы профиль оказывался ориентированным поперек потока при движении из носа в корму (фиг. 2а), и вдоль потока при движении из кормы в нос (фиг. 2б).
Площадь лобового сопротивления лопасти, а соответственно и величина силы, действующей на нее со стороны жидкости при движении в корму, таким образом, оказывается значительно больше, чем при перемещении пластины в нос. В результате, средняя по времени сила будет направлена в сторону движения аппарата, то есть будет создаваться упор. Профилирование пластины в форме лопасти позволяет дополнительно снизить ее сопротивление за счет безотрывного обтекания при движении из кормы в нос, а следовательно - повысить упор.
Расположение лопастей движителя с двух бортов позволяет аппарату совершать поворот в горизонтальной плоскости, путем задания различной скорости продольных колебаний для правой и левой лопасти. Такие повороты могут совершаться в том числе и при малых скоростях хода, что снижает необходимость в использовании подруливающего устройства.
В случае изменения фазы вращательных колебаний лопасти на противоположную, а также изменения направления поворота (фиг. 3), пластина-лопасть двигается вдоль потока из носовой части аппарата в корму (фиг. 3а), и поперек потока из кормы в нос (фиг. 3б), в результате чего создается режим реверса подводного аппарата, так как средняя по времени продольная сила (упор) поменяет свое направление на противоположное. Техническое обеспечение смены направления действия силы упора лопасти движителя дополнительно увеличивает маневренность подводного аппарата.
Реферат
Полезная модель относится к гребным движителям подводных объектов, в частности, к движителям невращающегося типа, которые создавая упор за счет силы сопротивления пластин - лопаток, совершающих возвратно-поступательные движения в направлении перемещения объекта, расположены побортно, то есть с двух сторон корпуса подводного объекта, и приводятся в движение электроприводами, работающими независимо друг от друга обеспечивая их перемещения с разными скоростями, создавая тем самым момент, поворачивающий подводный объект в горизонтальной плоскости, то есть сохраняет маневренность даже на скорости хода, близкой к нулю, регулирование поворота лопасти делает возможным уменьшение ее холостого хода и увеличение скорости аппарата, а изменение фазы электромоторов на противоположную приводит к изменению направление тяги движителя, что создает режим реверса.
Техническим результатом предлагаемого гребного лопастного движителя является увеличение скорости подводного объекта за счет снижения сопротивления холостого хода лопаток и расширение эксплуатационных характеристик движителя за счет обеспечения режима реверса.
Комментарии