Лопасть циклоидного ротора или циклоидного пропеллера с динамической оптимизацией формы и других параметров в пределах одного оборота - RU2772353C2
Код документа: RU2772353C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к лопастям циклоидных гребных и несущих винтов, а особенно к лопастям циклоидных несущих и гребных винтов, вращающихся по некруговой орбите.
Обзор известного уровня техники
Известные на сегодняшний день лопасти циклоидных гребных и несущих винтов, вращающихся по некруговой орбите (например, описанных в патенте US 8,540, 485), имеют фиксированную форму поперечного сечения. Однако в заявке на патент PCT/IL2013/050755 описан тип электромагнитного несущего или гребного винта, в котором лопасти, направляемые системой управления, следуют по собственной независимой траектории, при этом имеют заданную гибкость в поперечном сечении благодаря шарнирам, расположенным по всей длине лопасти; или же гибкость в поперечном сечении достигается благодаря использованию известных и подходящих эластичных материалов, например, эластомеров. Динамическое регулирование формы поперечного сечения лопастей обеспечивает создание виляющей или волнообразной тяги и может найти применение в других целях, например, в управляемом формировании и сбросе вихрей с задней кромки, а также динамической оптимизации формы лопасти для адаптации к различным эксплуатационным режимам на траектории ее движения. В вышеупомянутой заявке на патент лопасти изгибаются посредством векторов силы магнитного поля, воздействующих на магниты, закрепленные на концах лопасти. Таким образом, лопасти изгибаются в поперечном сечении при воздействии на них внешних сил. Данный тип электромагнитного гребного или несущего винта обладает такой способностью. Однако известные циклоидные несущие или гребные винты ее не имеют, в то время как динамическое регулирование формы поперечного сечения лопасти также значительно улучшило бы их характеристики. За исключением вышеупомянутой заявки на патент, в данной области техники не нашлось ничего связанного с циклоидными гребными и несущими винтами, обладающими возможностью динамического регулирования положения точки поворота лопасти. В вышеупомянутой заявке на патент описано регулирование положения виртуальной точки поворота на хорде лопасти, но не описано регулирование относительного положения физической точки поворота, и в данной области техники не нашлось документов, которые описывали бы эту особенность. Динамически изменяемые в плане формы нашли отражение в конструкции самолетных крыльев с изменяемой геометрией, но не в лопастях циклоидных несущих или гребных винтов, хотя в конструкции последних они нужны по целому ряду различных причин: ввиду необходимости изменять размер вихря на задней кромке лопасти и динамически регулировать текущее положение задней кромки каждой лопасти вдоль всей траектории ее вращения, а следовательно, расположение вихря на задней кромке лопасти и сброшенных потоков. Поворотные закрылки давно применяются в конструкциях крыльев самолетов с неизменяемой геометрией крыла и лопастей несущих винтов вертолетов, но не в конструкциях упомянутых лопастей несущих или гребных винтов, где они были бы весьма полезны при создании вихря на задней кромке лопасти, регулировании его размера, управляемом сбрасывании или его минимизации вплоть до полного исчезновения в тех частях траектории лопасти, где он был бы нежелателен, или для создания лопастью виляющей тяги. Предкрылки и прорези передней кромки используются в конструкции самолетных крыльев с неизменяемой геометрией и служат для улучшения подъемной тяги и предотвращения срыва. Почти свободная «включаемая» и «выключаемая» проницаемость к прохождению потока таких лопастей несущих и гребных винтов на большой площади их поверхности, и особенно на задней кромке, нейтрализует воздействие сильных локальных потоков, пересекающих траекторию, и/или влияние разницы динамического давления на противоположных сторонах, когда она нежелательна, и при необходимости используется в частях траектории лопасти при каждом обороте несущего или гребного винта. Однако такая проницаемость к прохождению потока имеет совершенно другую причину, иную структуру и в настоящий момент не описана ни в одном документе из данной области техники. Зная, что гибкая задняя кромка используется на лопасти, например, несущего винта вертолета, и учитывая, что гибкая кромка по одну или разные стороны точки поворота лопастей ориентирована на изгибание в том же или противоположном направлении, оснащение лопастей структурными элементами динамически изменяемой упругости вплоть до жесткости было бы особенно полезно в определенных режимах работы циклоидных несущих или гребных винтов, где аэроупругие или гидроупругие явления соответственно имеют такую же важность, как и для создания подъемной силы при обычных условиях. Однако эти явления в настоящий момент не описаны ни в одном документе из данной области техники. Возможность задавать твердость или гибкость передней и задней кромкам при необходимости смены их ролей для режима обратного воздушного потока и в других случаях остается очень желательной, но в данной области техники не нашлось документов, которые описывали бы эту функцию. Было бы полезно регулировать толщину профиля поперечного сечения лопасти, когда ее передняя и задняя кромки меняются ролями, но в данной области техники не нашлось документов, которые описывали бы эту функцию.
Цели и преимущества
Первая цель настоящего изобретения заключается в том, чтобы создать такие лопасти для циклоидных гребных и циклоидных несущих винтов любого типа, которые позволяли бы динамически регулировать свою форму поперечного сечения благодаря встроенному механизму.
Другая цель настоящего изобретения заключается в создании таких лопастей для вышеупомянутых гребных и несущих винтов, которые имели бы возможность динамически изменять положение физической точки поворота вдоль своей хорды так, чтобы можно было регулировать относительные размеры вихрей на передней и задней кромках.
Другая цель настоящего изобретения заключается в том, чтобы создать такие лопасти для вышеупомянутых гребных и несущих винтов, которые имели бы возможность динамически изменять свою форму в плане благодаря увеличению или уменьшению выпуска задней кромки, который может быть увеличен различно по обоим концам лопасти в зависимости от текущего аэродинамического или гидродинамического режима на каждом конце соответственно для управления размером, формой и движением по всей длине лопасти, формированием и сбросом вихря на ее задней кромке.
Другая цель настоящего изобретения заключается в том, чтобы создать для вышеупомянутых гребных и несущих винтов такие лопасти, закрылки которых поворачивались бы под действием потоков или привода в обоих направлениях в целях управления вихрем и другими потоками, воздействующими на заднюю кромку лопасти.
Другая цель настоящего изобретения заключается в том, чтобы создать для вышеупомянутых гребных и несущих винтов такие лопасти, которые имели бы по крайней мере одну гибкую кромку, жесткость которой можно было бы регулировать динамически и при необходимости различно по всей длине лопасти в реальном времени для улучшения управления гидроупругими или аэроупругими явлениями соответственно.
Другая цель настоящего изобретения заключается в том, чтобы создать лопасти, способные изменять толщину и форму профиля поперечного сечения соответственно, когда передняя и задняя кромки меняются ролями в режиме обратного воздушного потока и в других случаях, требующих подобного изменения поперечного сечения лопасти.
Другая цель настоящего изобретения заключается в том, чтобы в процессе, когда передняя и задняя кромки лопасти меняются ролями, передняя кромка, бывшая до этого жесткой, стала гибкой, а задняя кромка, бывшая до этого гибкой, стала жесткой.
Другая цель настоящего изобретения заключается в том, чтобы с помощью системы управления при необходимости регулировать проницаемость к прохождению потоков на большой части поверхности лопасти, и особенно на ее задней кромке, в нужных точках траектории движения лопасти, чтобы иметь возможность нейтрализовать воздействие сильных локальных потоков, пересекающих траекторию, или влияние разницы динамического давления на противоположных поверхностях лопасти, когда она нежелательна.
Краткое описание графических материалов
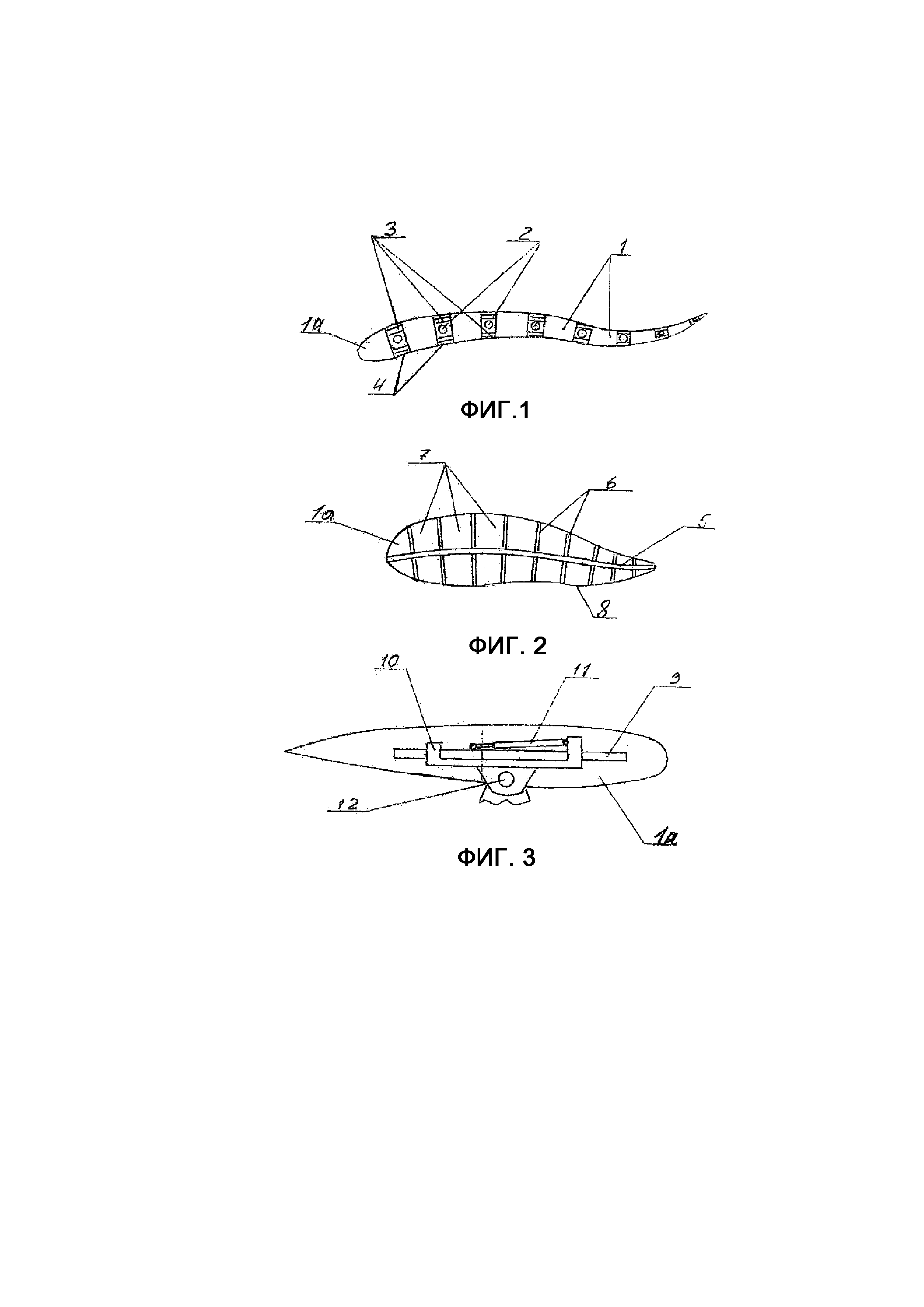
На рис. 1 представлен вид лопасти, оснащенной встроенными линейными приводами, которые служат для изменения относительного углового расположения соседних сегментов и, как следствие, динамического регулирования формы поперечного сечения.
На рис. 2 представлен вид лопасти, оснащенной эластично гибкой пластиной, на которой между разделительными перегородками установлены сегменты из электроактивного полимера, которые изменяют свои размеры при подаче напряжения, что приводит к динамическому изменению формы поперечного сечения лопасти.
На рис. 3 представлен вид лопасти на шарнирном основании, оснащенном приводом для динамического перемещения лопасти относительно шарнира и, как следствие, изменения относительного положения точки поворота лопасти.
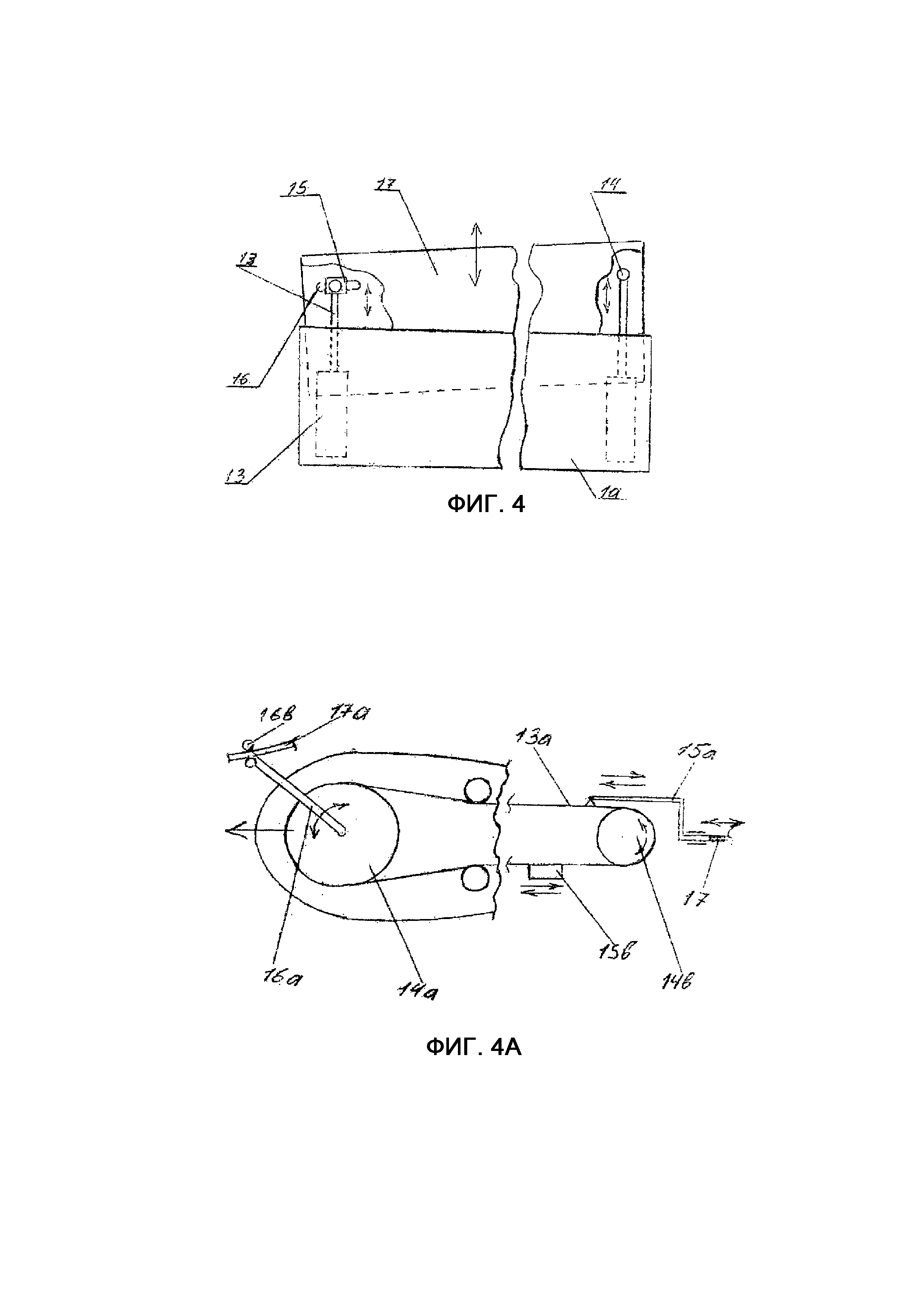
На рис. 4 представлен вид сверху лопасти с выдвижным закрылком.
На рис. 4а представлен вид сбоку лопасти другой конструкции с выдвижным закрылком.
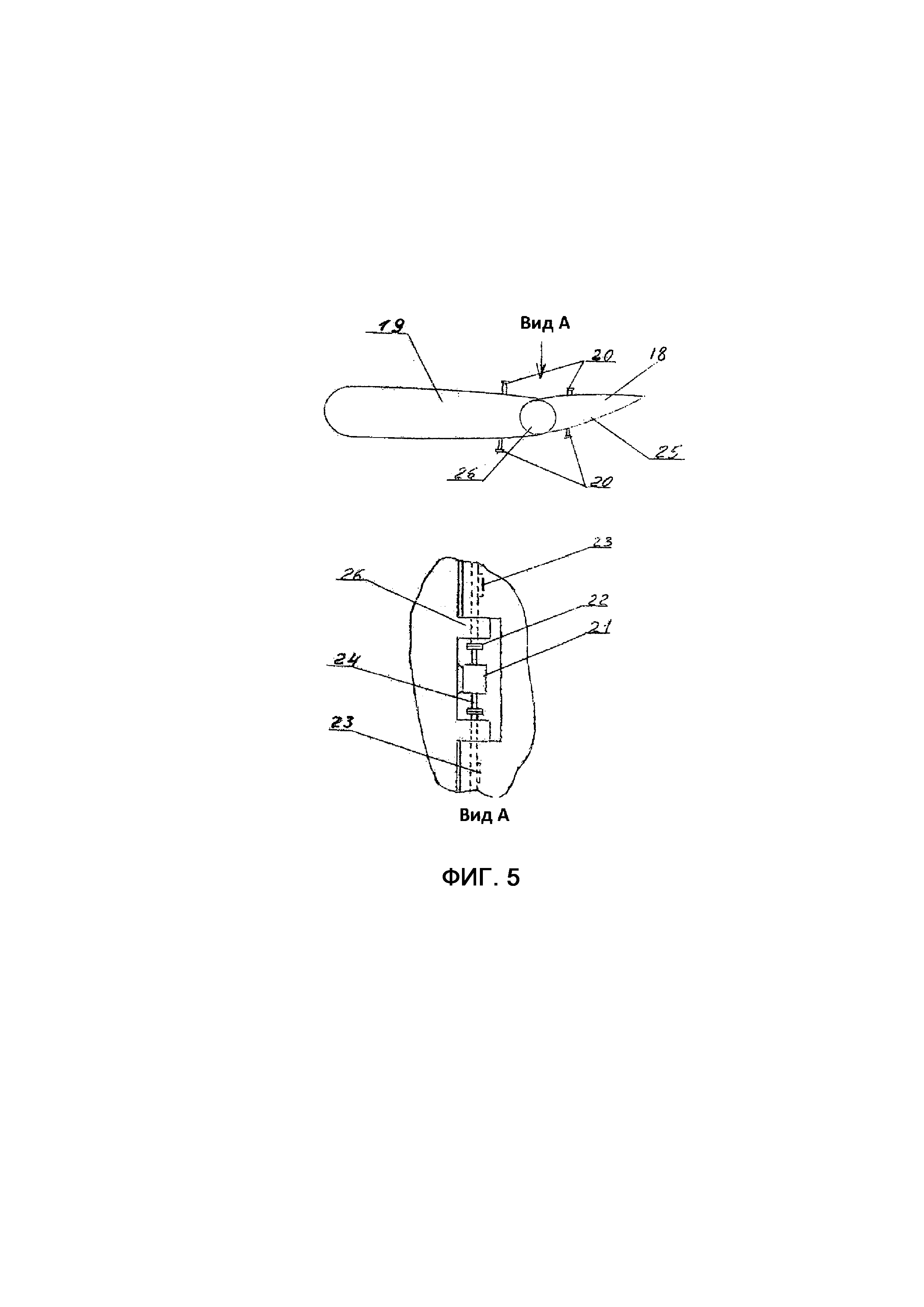
На рис. 5 представлен вид сбоку лопасти с поворотным закрылком.
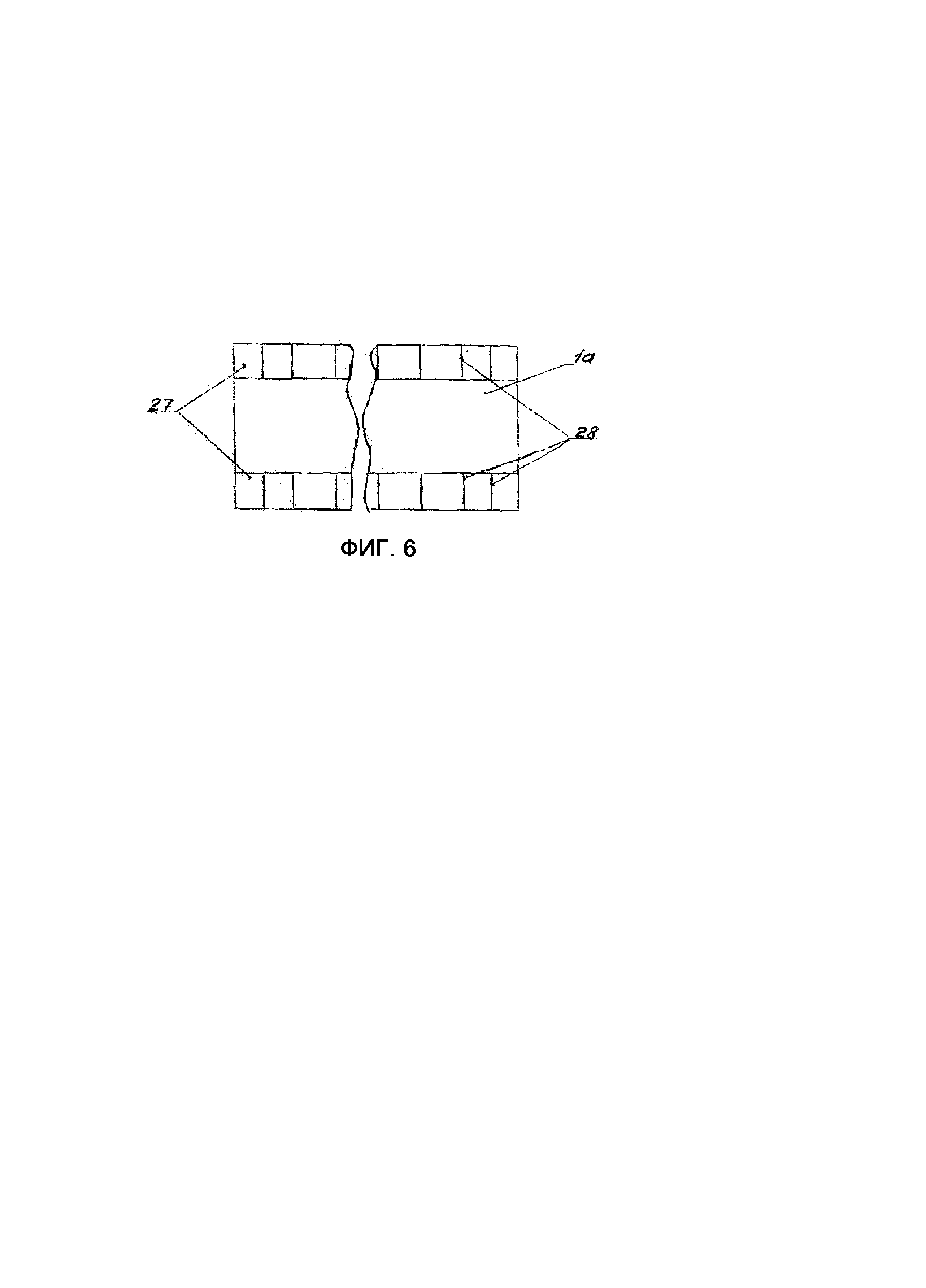
На рис. 6 представлен вид сверху лопасти с двумя гибкими кромками с различно регулируемой жесткостью по длине, ориентированными в противоположных направлениях и подходящими для режима, когда задняя и передняя кромки меняются ролями.
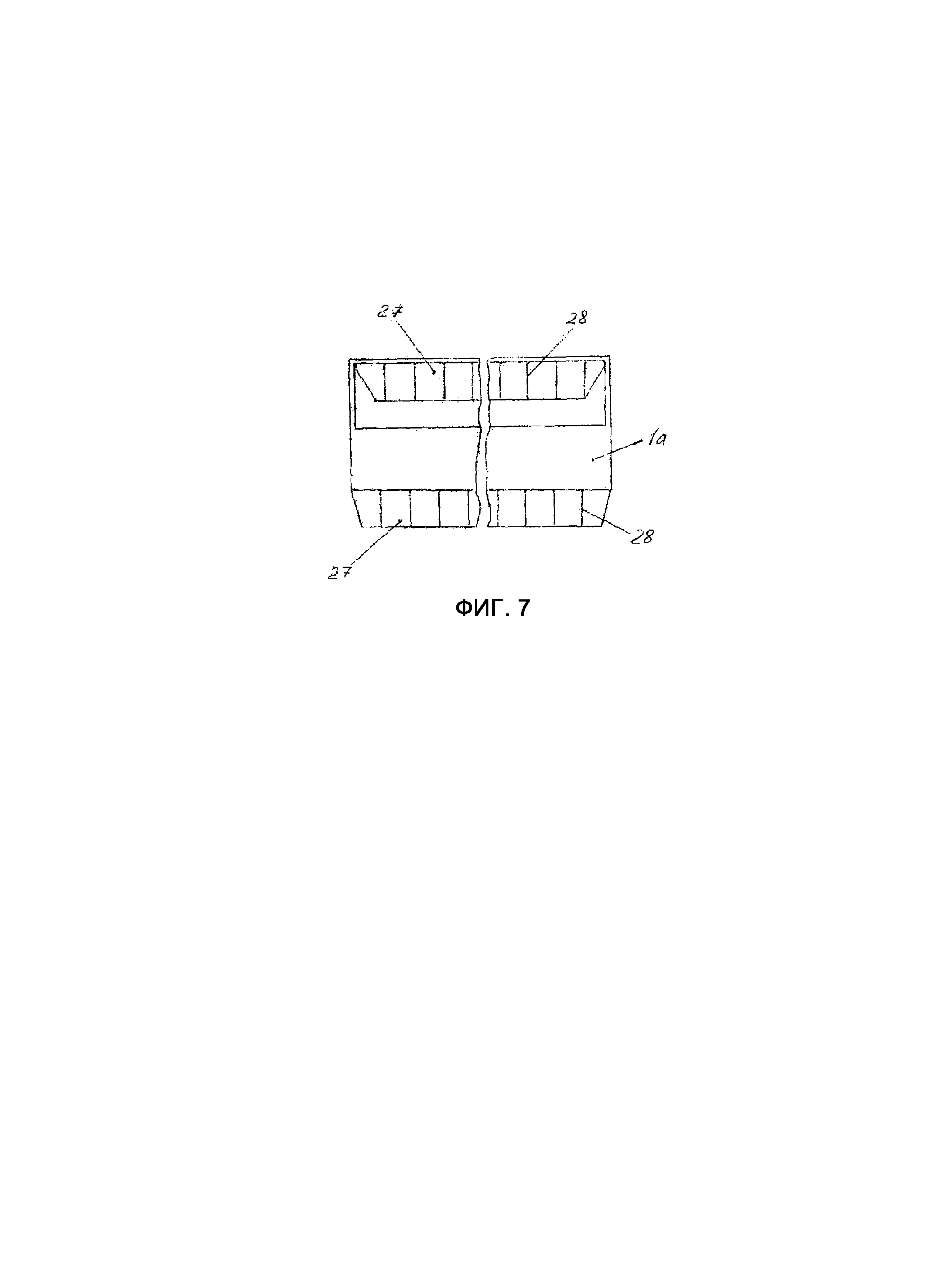
На рис. 7 представлен вид сверху лопасти с двумя регулируемыми закрылками, расположенными на противоположных краях лопасти, которые можно ориентировать в одном направлении в процессе работы.
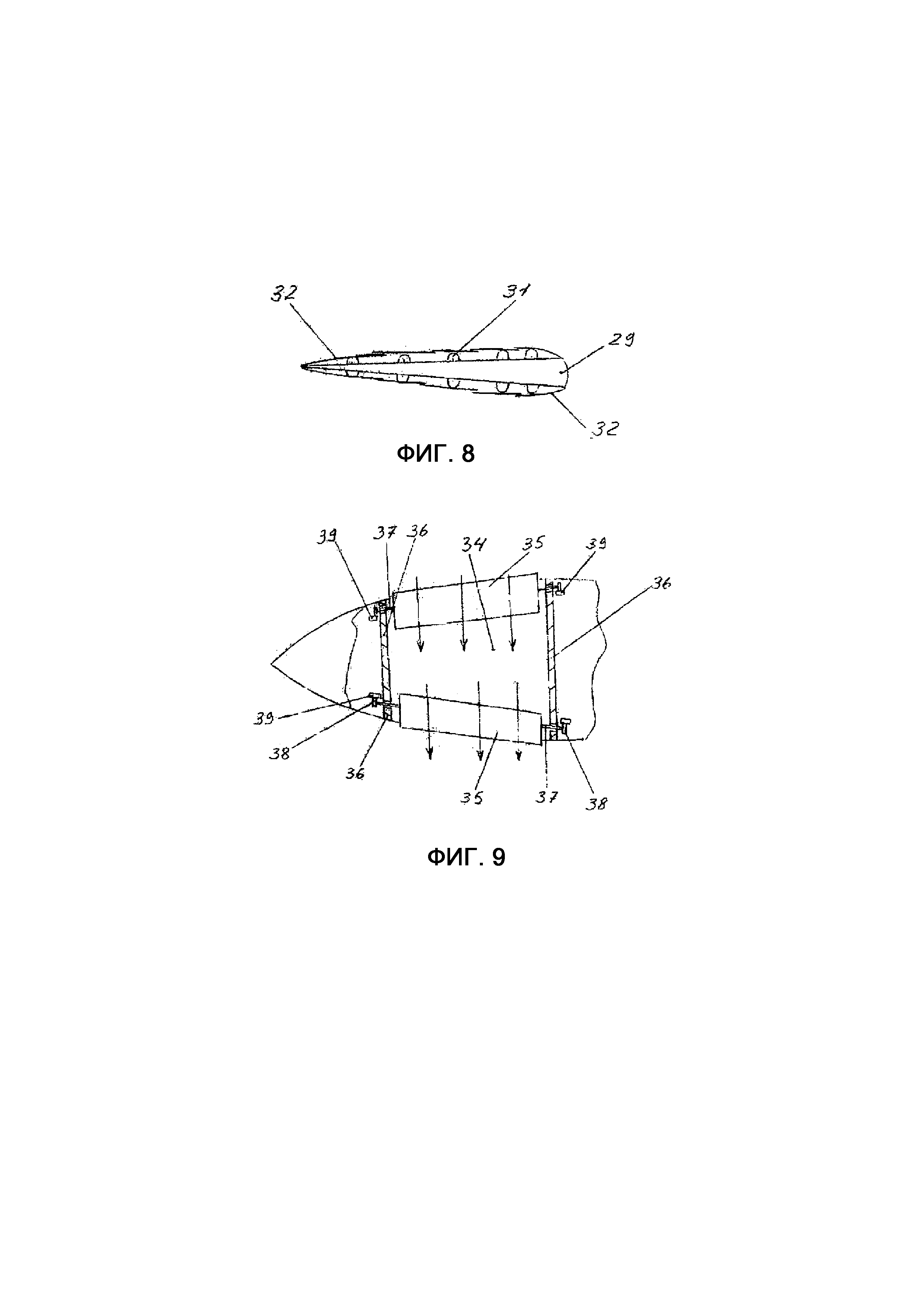
На рис. 8 представлен вид сбоку лопасти с регулируемой толщиной профиля поперечного сечения.
На рис. 9 представлен частичный вид сбоку лопасти с «включаемой» или «выключаемой» проницаемостью к прохождению потока.
Описание предпочтительных осуществлений изобретения
В первом осуществлении изобретения (рис. 1) лопасть (1a) представляет собой набор параллельных сегментов (1), соединенных между собой шарнирами (2) или гибкими связями и тем самым образующих поверхность, гибкую в поперечном сечении.
Возможные конфигурации этой лопасти могут быть выполнены в виде сегментов неравных размеров по длине хорды, когда, например, первый от передней кромки сегмент является самым длинным. Данные сегменты оснащены пластинами, к которым прикреплены миниатюрные (где это возможно) приводы (3), расположенные в зазорах между этими сегментами, например, приводы быстрого срабатывания из электроактивного полимера, пьезоэлектрические приводы со столбиками кристаллов или пьезоэлектрические приводы с увеличенным ходом для лопастей аэродинамического профиля, а для гораздо более медленных лопастей гидродинамического профиля — электромагнитные приводы, приводы из электроактивного полимера или приводы на основе сплавов с памятью формы. Зазоры перекрываются эластичными щитками, занимающими пространство от одного до следующего сегмента. Данный щиток можно сконструировать так, чтобы он эластично и легко прижимался к поверхности следующего сегмента; при этом зазор останется прикрытым, когда соседние сегменты поменяют свое относительное положение. Для контактной поверхности таких сегментов этих аэродинамических профилей, к которой прижимается щиток, можно применить поверхностное покрытие с низким коэффициентом трения и/или использовать воздушную смазку, например, посредством отведения потока окружающего воздуха в область контакта между сегментом и щитком. Поверхность гидродинамического профиля можно обработать специальным образом или нанести на нее покрытие, пригодное для эксплуатации с водной смазкой. Поверхность данного щитка, слегка прижимающегося к сегменту, можно обработать покрытием с похожим составом. Как вариант, можно нанести эластичное покрытие на верхнюю и нижнюю поверхности лопасти, например, выполненное из эластомерных материалов. Другое исполнение первого осуществления изобретения, особенно хорошо подходящее для гребных винтов, показано на рис. 2 и отличается тем, что упругая пластина (5) проходит вдоль всей хорды, а перпендикулярно этой пластине установлены перегородки (6). Такая структура лопасти дает гибкость в поперечном сечении в сочетании с жесткостью по длине, которую обеспечивают перегородки (6). Между указанными перегородками установлены и прикреплены к этим же перегородкам сегменты из электроактивного полимера (7), подключенные к электрической цепи. Поверхности лопасти покрыты эластичным покрытием (8), например, выполненным из эластомера. Еще одна версия первого осуществления изобретения заключается в использовании поворотных приводов на шарнирах между сегментами (1) по аналогии с тем, что описано в четвертом осуществлении изобретения для поворота закрылка задней кромки, но в первом осуществлении изобретения вышеупомянутые поворотные приводы должны использоваться для изменения относительных плоскостей соседних сегментов, а следовательно, и формы лопасти. Еще одна версия первого осуществления изобретения имеет стержни, выполненные из сплавов с памятью формы и соединяющие сегменты (1), причем данные стержни изгибаются по команде системы управления, что приводит к изменению положения относительных плоскостей соседних сегментов, а следовательно, и формы лопасти. При необходимости на поверхность лопасти устанавливают датчики давления/скорости потока, а также передатчики, например, инфракрасные или радиопередатчики, передающие данные с датчиков, а также дающие обратную связь системе управления касательно фактического расположения частей лопасти.
Второе осуществление изобретения предусматривает лопасть либо фиксированной формы поперечного сечения, либо переменной формы (рис. 3), на обоих концах которой закреплены поддерживающие пластины (9), установленные с возможностью скольжения на коротких поворотных направляющих (10). К вышеуказанной поворотной направляющей (12) прикреплены соответствующие концы подходящих приводов (11), а противоположные концы данных приводов прикреплены к кареткам. Роль подходящих приводов быстрого действия могут исполнять, например, приводы из электроактивных полимеров или пьезоэлектрические приводы с увеличенным ходом. Возможно закрепить каретки внутри другой пары кареток, а приводы присоединить к внешней и внутренней кареткам таким же образом, как описано выше для поддерживающих пластин (9) и короткой поворотной направляющей (10). Это необходимо для того, чтобы каретки с приводами двигались ступенчато, тем самым увеличивая ход лопасти относительно точки поворота, потому что приводы, требуемые для аэродинамических профилей с регулировкой относительного положения точки поворота лопасти в реальном времени должны иметь высокую скорость срабатывания, но обычно имеют короткий ход — например, к ним относятся приводы на основе пьезоэлектрического кристалла, которые можно использовать вместе с подходящими известными увеличителями хода. Поступательное движение лопасти относительно точки поворота приведет к перераспределению ее массы вперед или назад по направлению движения. Это явление можно нейтрализовать использованием противовесов аналогично тому, как описано в патенте US 8,540, 485 и/или заявке на патент PCT/IL2013/050755, либо путем использования других известных противовесных механизмов и/или способов демпфирования.
Для третьего осуществления первая версия лопасти настоящего изобретения (рис. 4) представляет собой лопасть либо фиксированной формы, либо гибкую лопасть, как описано в первом осуществлении. На подходящих элементах лопасти должны быть смонтированы 2 быстродействующих линейных привода (13), шарнирно присоединенных к шпилькам (14). Слева установлена шпилька (14) на подвижной опоре (15). Данная опора движется вдоль короткой направляющей (16) и создает условия для различающихся движений левой и правой сторон выдвигающейся задней кромки (17), выполненной из очень легкого материала, например, листа из углеродных нанотрубок и тому подобного. Для второй версии этого осуществления изобретения (рис. 4А) ремень (13а) натягивают на вал большего диаметра (14а) и вал (14б). Соединительная тяга (15а) присоединена к данному ремню и к выдвигающейся и втягивающейся задней кромке (17), в то время как противовес (15б) прикреплен к противоположной стороне данного ремня (13а). Рычаг (16а) со шкивами/роликами (16б) закреплен на специальной направляющей задней кромки (17а); эта направляющая может иметь фиксированную или изменяемую форму. Также вал (14а) может быть функционально связан с поворотным приводом (не показан), а не с рычагом со шкивами на направляющей. Могут быть другие различные конструкторские решения для простой задачи выдвижения и втягивания задней кромки, но с учетом всех внесенных изменений они остаются в духе и не выходят за пределы объема настоящего изобретения. Выдвижение или втягивание данной задней кромки приведет к перераспределению ее массы вперед или назад. Это явление можно нейтрализовать использованием противовесных механизмов аналогично тому, как описано в патенте US 8,540, 485 и/или заявке на патент PCT/IL2013/050755, либо путем использования других известных противовесных механизмов и/или способов демпфирования.
Четвертое осуществление лопасти в этом изобретении (рис. 5) включает в себя поворотный закрылок (18), шарнирно прикрепленный к корпусу лопасти (19). Вдоль краев закрылка и в соответствующих местах корпуса лопасти должны быть установлены стопоры с демпферами (20), ограничивающими максимальный поворот закрылка в обе стороны. Соосно с шарниром(-ами) установлен быстродействующий поворотный привод (21) с муфтами (22). Благодаря шплинтам (23), закрылок (25) вращается совместно с валом (24) на шарнирах (26). При необходимости на закрылке может быть установлен миниатюрный передатчик, например, инфракрасный, для передачи в систему управления сигнала о фактическом положении закрылка. При необходимости в конструкции поворотного закрылка (18) может быть предусмотрена гибкая задняя кромка, описанная в пятом осуществлении. Также поворотный закрылок в этом осуществлении может поворачиваться не с помощью быстродействующего поворотного привода, а посредством рычага со шкивами (не показаны), прикрепленного к валу (24) и установленного на специальной направляющей закрылка, как это было описано во второй версии третьего осуществления и показано на рис. 4А. Было бы желательно, если бы этот поворотный закрылок был сбалансирован относительно своей оси вращения, особенно для целей применения в более быстрых воздушных винтах.
В пятом осуществлении (рис. 6) в конструкции лопасти (1а) предусмотрены гибкие задние кромки (27) с ребрами жесткости (28), протягивающимися от того края, где гибкая задняя кромка прикреплена к корпусу лопасти, до свободного края гибкой задней кромки. Данные ребра жесткости (28) должны быть расположены на определенном расчетами расстоянии друг от друга. Данные ребра должны быть сделаны из упругого материала, например, видов пластика, применяемого в составе пластмассовых пружин, упругих бронзовых сплавов или пружинной стали. Ребра в одной версии этого осуществления изобретения обычно имеют форму тонкостенной трубы, заполненной маслом или другой несжимаемой жидкостью без воздушных пробок, герметично закупоренной с одного конца и закрытой с другого конца поршнем или, если это осуществимо для тонкостенной трубы данного диаметра, гибкой мембраной, выдерживающей высокое давление. Причем данный поршень или мембрана должны управляемо, согласно заранее определенной математической функции или формуле, описывающей величину перемещения во времени, перемещаться приводом, например, пьезоэлектрическим или на основе электроактивных полимеров, более или менее внутрь полости трубки или наружу с частотой, заданной системой управления или по конкретной команде системы управления. Когда поршень или мембрана продвигается внутрь трубки, то создает высокое давление внутри ее полости, вследствие чего возникает растягивающее натяжение в ее стенках и, для определенных видов материалов трубок, например, пластмасс, их значительное радиальное расширение, и, как следствие влияния этих факторов, увеличение жесткости трубки, и наоборот, когда поршень или мембрана перемещаются обратно. При необходимости данный поршень или мембрана может находиться снаружи полости трубок ребер (28), а его/ее выходное высокое давление передаваться в полость трубки через специальную врезку, или внутри полости трубки может быть предусмотрена вставка, например, выполненная из специального электроактивного полимера, изменяющего свой объем при подаче напряжения и, как следствие, изменяющего давление внутри. Также в версии, особенно пригодной для гребных винтов с малым числом оборотов, такое ребро жесткости может представлять собой упругую балку, выполненную из тех же материалов, что были перечислены выше для ребер, с удлиненной формой поперечного сечения, например, эллиптической или овальной, и установленную внутри круглой трубки. Когда данные балки поворачиваются приводами относительно плоскости лопасти, площадь их момента инерции относительно этой плоскости изменится, при необходимости в несколько раз. Другой способ создания ребра жесткости для воздушных винтов с более высоким числом оборотов — использование листовой рессоры, состоящей из стопки двух и более узких пластин определенной расчетами толщины, поверхности соприкосновения которых имеют электропроводные слои или покрытие с тонким слоем электрореологической жидкости между данными пластинами. Поверхности пластин можно намеренно загрубить или нанести на них насечку, чтобы усилить изменение вязкости данной жидкости при возникновении трения между данными пластинами. Подачей напряжения можно регулировать вязкость данной жидкости вплоть до затвердевания, тем самым регулируя жесткость данных миниатюрных (где это уместно) листовых рессор, используемых в качестве ребер жесткости. Этот и другие способы применения таких ребер переменной жесткости подробно описаны применительно к листовым рессорам и витым пружинам в заявках на патенты «Пружины с умной памятью и их сочетания» PCT/IL2015/05021 и «Пружины с динамически изменяемой жесткостью» PCT/IL2016/051195. Регулирование жесткости ребер (28) можно произвести различно по длине лопасти, что повлияет на форму появляющегося вихря и его возможное перемещение по профилю лопасти вдоль данной гибкой кромки. Данную гибкую кромку по длине лопасти можно предусмотреть в более чем одном месте вдоль ее хорды, например, (рис. 6) вдоль противоположных краев лопасти с ориентацией гибких кромок друг напротив друга, определяемую как направление от закрепленного края до свободного подвижного края. Это было бы особенно полезно в случаях, когда требуется эксплуатация в условиях обратного воздушного потока или в других случаях, где при текущем мгновенном положении лопасти на траектории и ее текущем угле наклона смена ролей передней и задней кромок оказывается целесообразной. В этом случае система управления принимает такое решение, и кромка, бывшая до этого задней, становится жесткой, а кромка, бывшая до этого передней, становится соответственно гибкой. Также гибкие кромки, в зависимости от типа рабочего движения, для которого сконструирована лопасть, могут быть установлены в одном направлении (рис. 7) либо по разные стороны от точки поворота лопасти, либо по одну сторону. В обоих случаях потребуется прорезь вдоль всей поверхности лопасти определенного расчетами и достаточного размера для функционирования дополнительной гибкой кромки, не расположенной ни на переднем, ни на заднем краях.
Для шестого осуществления данного изобретения в конструкции лопасти предусматривается динамическое изменение толщины профиля в целях оптимизации поперечного профиля лопасти, а при необходимости и продольного профиля тоже, для различных условий и режимов эксплуатации вдоль всей ее траектории в пределах одного оборота. Оно также пригодится в конструкции лопастей пятого осуществления данного изобретения, где передняя и задняя кромки могут меняться ролями, и соответственно этому должна изменяться форма профиля лопасти. Лопасть, как показано на рис. 8, представляет собой основание фиксированной или изменяемой формы, как описано выше для первого осуществления данного изобретения (29), с гибким покрытием (30), выполненным из подходящего материала с требуемой степенью гибкости, устойчивости, упругости и усталостной прочности. Например, это может быть листовое покрытие из графена, углеродного волокна для применения в авиации, пружинной стали, упругих бронзовых сплавов или углеродного волокна для гребных винтов. Данное листовое покрытие должно быть закреплено на верху или внизу основания (29), и его будет поддерживать некоторое число линейных приводов (31), установленных на основании в определенном расчетами порядке и на определенном расчетами расстоянии друг от друга. Данными линейными приводами могут служить, например, конические спирали из сплавов с памятью формы, способные изменять свою форму от конуса при полном растяжении до плоской спирали в полностью сложенном состоянии, с индивидуальным позиционным контролем через систему управления для каждого такого элемента или заранее определенной группы элементов, например, когда они установлены в ряд на одной плоской структурной балке (33), проходящей вдоль профиля лопасти. В то время как обычно в пределах одного ряда приводов они должны перемещаться на одно и то же расстояние, при необходимости такие приводы из одного ряда или их группу можно заставить двигаться различно по длине лопасти, тем самым позволяя регулировать продольный профиль лопасти. Другой способ применения таких рядов приводов состоит в использовании надувного, пневматически для воздушных винтов или пневматически/гидравлически для гребных винтов, и расширяющегося шланга, закрепленного на основании (29) и прикрепленного к плоской структурной балке (33). Также роль таких линейных приводов для применения в авиации могут выполнять пьезоэлектрические приводы с увеличителями хода гораздо более быстрого срабатывания. Они могут служить для динамического изменения формы данного листового покрытия с каждым оборотом винта. По мере изменения кривой профиля поперечного сечения длина данного листового покрытия также изменяется. Такое изменение длины может быть реализовано путем применения листового покрытия, разделенного на частично перекрывающие друг друга полоски (32) рассчитанной ширины. Так как разница высот между соседними полосками меняется, изменение длины данной кривой обеспечивается посредством изменения величины перекрытия между соседними полосками. Также можно использовать соединение типа «паз — выступ» по длине соседних полосок. Если полоска листового покрытия покрывает более одного ряда опор с приводом, листовое покрытие прикрепляется к одному ряду и снабжается известными средствами для обеспечения его перемещения по другим рядам таких опор, например, с использованием подходящих эластичных направляющих, прикрепленных к листовому покрытию, и роликов или скользящих опор, установленных на опорах с приводом. Также на листовое покрытие может быть установлен щиток, выполненный из эластомера, способный изменять длину (не показан) и прикрывающий края полосок листового покрытия. Есть большое многообразие таких опор с приводом и других приводных устройств, которые можно использовать для изгибания данного листового покрытия. С учетом всех внесенных изменений считается, что они остаются в духе и не выходят за пределы объема настоящего изобретения. Вторая версия шестого осуществления изобретения особенно подходит для лопастей гребных винтов. Она представляет собой накладки из подходящих электроактивных полимеров (не показаны) или других подходящих материалов, способных изменять объем и/или форму определенным расчетами образом и в нужном объеме при подаче напряжения. Данные накладки закреплены на неподвижном или упругом основании (29), возможно, на обеих его поверхностях, и при необходимости оснащены защитным покрытием, состоящим из цельного листа или нескольких полосок, по возможности расположенных внахлест, выполненных, например, из эластомера, и проходящих через их общую поверхность по каждой поверхности лопасти, на которой установлены данные накладки. Для обеих версий шестого осуществления изобретения движение полосок листового покрытия или всего листового покрытия целиком может быть обеспечено с помощью смазки опорной поверхности; а именно водной смазки гребных винтов и воздушной смазки для воздушных винтов. Смазывающей водой или воздушным потоком соответственно может служить накачиваемый или отведенный набегающий поток на лопасти.
Для седьмого осуществления настоящего изобретения лопасть должна быть оборудована управляемой «включаемой» или «выключаемой» почти свободной проницаемостью для прохождения потока на большой площади ее поверхности в целях смягчения влияния очень сильных потоков, пересекающих траекторию и встречающихся на некоторых более перспективных траекториях. Эти потоки создают значительные импульсы отрицательной подъемной силы или отрицательной тяги соответственно, но существуют другие определенные обстоятельства, при которых указанная проницаемость, создаваемая по команде системы управления, будет особенно полезна. Обе поверхности лопасти (рис. 9) должны иметь отверстия (34), совпадающие по размеру и расположению и закрытые группами поворотных полосок по типу жалюзи (35), которые могут располагаться по длине лопасти или перпендикулярно ей, что более предпочтительно, так как в этом случае менее вероятно, что они будут препятствовать потокам, проходящим по лопасти. Между данными отверстиями на обеих поверхностях, закрытыми жалюзи, должны располагаться каналы (36) для направления и латерального ограничения потока, проходящего через лопасть между данными отверстиями. Ось поворота (37) полосок данных жалюзи может иметь шестерни или зубчатые секторы (38), миниатюрные там, где это возможно, предпочтительно на обоих концах полосок во избежание их скручивания, причем данные шестерни или зубчатые секторы должны находиться в зацеплении с приводной зубчатой рейкой (39) или зубчатым приводным ремнем. В легковесном авиационном исполнении данные полоски можно закрепить на обоих концах струновидными торсионами вместо оси поворота и прикрепить рядом с краем обычной управляющей тягой, приводимой в движение линейным приводом. Чтобы нейтрализовать любые аэродинамические силы, создаваемые поворотом множества полосок, при необходимости половину из них можно поворачивать одной тягой в одном направлении, а другую половину — другой тягой в другом направлении. Данный привод должен иметь возможность блокировки или независимое запирающее устройство известного типа (не показано) для функциональной связи с данной толкающей или тянущей тягой или зубчатой рейкой (39). При необходимости данные полоски можно обеспечить возможностью поворота потоками в открытое положение путем отсоединения запирания с приводом или указанным независимым замыкающим устройством до возникновения данных потоков, а затем поворота в закрытое положение приводной тягой или вышеуказанными струновидными торсионами с упругостью на поворот, достаточной для этого.
Эскизы и схемы
Предоставляются отдельно.
Действие
При эксплуатации лопасть в первом осуществлении изобретения (рис. 1) изменит форму в соответствии с режимом эксплуатации, выбранным системой управления. Изменение формы произойдет при помощи приводов (3), которые расположены в зазорах между сегментами (1). Они изменяют относительное расстояние между своими точками крепления на соседних сегментах (1) по командам системы управления, тем самым изменяя относительное угловое позиционирование сегментов и, как следствие, форму лопасти. При помощи привода, контролируемого системой управления, лопасть выполняет изгибание, подобное, например, вилянию рыбьего хвоста, преимущественно конечными сегментами, совершая волнообразное движение, или постоянно образует криволинейные профили для создания оптимальной подъемной силы/тяги, наиболее подходящих для условий работы в текущий момент. Другая версия этого осуществления изобретения, показанная на рис. 2, работает следующим образом. Система управления скоординированно активирует сегменты из электроактивного полимера (7), которые расширяются и сжимаются, надавливая на перегородки (6) и тем самым заставляя упругую пластину (5) изгибаться, что приводит к изгибанию всей лопасти по команде системы управления. При необходимости непосредственно на лопасти могут быть установлены датчики давления/скорости потока, которые обеспечивают систему управления полной информацией о текущем состоянии потоков, попадающих на лопасть. Датчики должны передавать данные на приемное(-ые) устройство(-а), расположенное(-ые) в ином месте конструкции гребного/воздушного винта, возможно, вместе с сигналами, например, инфракрасными, что позволяет определять точное расположение элементов лопасти и отправлять эти данные в систему управления.
При работе лопасти из второго осуществления изобретения (рис. 3) по команде системы управления приводы должны изменять расстояние между своими точками крепления на короткой поворотной направляющей (10) и каретке лопасти, тем самым перемещая каретку вместе с лопастью, установленной на ней, относительно данной точки поворота (12), что приведет к изменению относительных размеров вихрей на передней и задней кромках. Если для ступенчатого движения используется больше одной каретки, то приводы совершают соответствующее движение между установленными одна на другую каретками. Как описано для первого осуществления, при необходимости данные о давлении/скорости потока на поверхности лопасти и информация о ее расположении должны быть переданы в систему управления.
В третьем осуществлении (рис. 4) приводы (13) срабатывают по команде системы управления, тем самым перемещая шпильки (14), закрепленные на подвижной опоре (15), что приводит к перемещению задней кромки (17) внутрь или наружу относительно заднего края лопасти. Приводы (13) могут срабатывать различно, тем самым обеспечивая различное положение шпилек (14). Вследствие этого правый и левый углы задней кромки будут располагаться на разном расстоянии от заднего края лопасти. В альтернативном варианте конструктивного исполнения (рис. 4а) предусмотрен радиальный рычаг (16а) с роликами, перемещающимися по направляющей (17а) задней кромки, который вращается сам и поворачивает вал 14а, который приводит в движение ремень (13а) и прикрепленную к нему соединительную тягу (15а), которая, в свою очередь, задвигает или выдвигает заднюю кромку (17), в то время как противовес (15б) перемещается в противоположном направлении относительно задней кромки (17). Выдвижение задней кромки можно использовать для сбрасывания при необходимости вихря с задней кромки лопасти, возникающего вдоль ее заднего края, или для управления размером вихря на задней кромке или потока, сходящего с задней кромки. Также информация о положении выпуска задней кромки и данные от любого датчика давления/скорости потока на нем может быть передана в систему управления, как описано выше.
В четвертом осуществлении (рис. 5) настоящего изобретения лопасти, когда система управления разъединяет муфту сцепления (22), поворотный закрылок переходит на свободный ход, и поток прижимает его к какой-либо стороне лопасти, сбрасывая вихрь с задней кромки лопасти или позволяя сильным нежелательным потокам, появляющимся на определенных точках изгиба траектории, отклоняться в нисходящий поток, не создавая отрицательную подъемную силу и другие неблагоприятные последствия. Затем по команде системы управления привод (21) и муфта сцепления (22) входят в сцепление, в результате чего закрылок выравнивается относительно лопасти или устанавливается на какой-либо другой угол, задаваемый системой управления. Силовое управление поворотом закрылка можно использовать для приведения его в движение, подобное виляющей тяге, или для управления возникновением вихря на задней кромке лопасти.
В пятом осуществлении настоящего изобретения (рис. 6) конструкция лопасти предусматривает гибкие задние кромки (27), жесткость ребер (28) которых динамически регулируется в режиме реального времени. Это нужно для управления и оптимизации мгновенной геометрии кривизны, сформированной гибкими кромками, в целях оптимизации влияния создаваемых вихрей и, как следствие, увеличения до максимума коэффициента полезного действия лопасти при работе в режимах с различными параметрами, а именно числом оборотов, скоростью и направлением набегающего потока, геометрией проходимой части траектории лопасти и текущим углом атаки (если применимо) в совокупности с мгновенной текущей общей формой поперечного сечения лопасти. Данное динамическое изменение жесткости можно применить различно по длине лопасти и тем самым точно контролировать создание вихря, его форму и движение по длине лопасти, а также создаваемую подъемную силу или тягу. Так как в конструкции лопасти этого осуществления настоящего изобретения может быть предусмотрена не одна гибкая кромка, выбор системой управления правильного момента сбрасывания вихря с передней по ходу гибкой кромки должен учитывать влияние на работу гибкой кромки, расположенной за ней.
Работа лопасти в шестом осуществлении настоящего изобретения достаточно подробно описана в разделе Описание и не будет повторяться здесь, но приведена в справочных целях, как если бы была изложена полностью.
Работа лопасти в седьмом осуществлении настоящего изобретения происходит следующим образом. По команде от системы управления запирающее устройство (не показано), блокирующее движение зубчатой рейки (39) или обычной тяги, присоединенной к поворотным полоскам (35), или линейный привод (не показан), присоединенный к данной тяге, отсоединяется, вследствие чего полоски (35) поворачиваются потоками в заранее определенном направлении на ту сторону лопасти, где ожидается высокое динамическое давление. Как следствие, то же будет происходить и на противоположной поверхности лопасти у соответствующего отверстия, когда динамическое давление через канал достигнет поворотных полосок. В итоге поток проходит сквозь лопасть по каналу, соединяющему открытые отверстия. По следующей команде системы управления, которая может быть инициирована при изменении динамического давления или прохождении лопасти в другую часть ее траектории, привод перемещает данную зубчатую рейку (39) или обычную тягу, возвращая данные полоски в исходное положение, и либо привод, либо запирающее устройство препятствует любому перемещению полосок до следующей команды системы управления. Для версии седьмого осуществления настоящего изобретения с поворотными полосками (35), удерживаемыми торсионами, роль системы управления может быть сведена до управления только запирающим устройством, чтобы предотвратить открывание отверстий, когда оно нежелательно или в той части поверхности лопасти, где это на данный момент нежелательно, тогда как полоски поворачиваются под действием динамического давления потока, тем самым открывая отверстия. Затем торсионы возвращают полоски в исходное положение, закрывая отверстия, когда динамическое давление падает до определенного расчетами уровня. Другой вариант состоит в повороте данных полосок в какую-либо сторону приводом по команде системы управления, не полагаясь на действие потоков на планки. Это сделало бы возможным опережающее открытие и закрытие данных отверстий в качестве заблаговременной подготовки к началу изменения потока и/или динамического давления.
Реферат
Изобретение относится к лопастям циклоидных роторов и циклоидных пропеллеров. Лопасть для циклоидных пропеллеров или циклоидных роторов, имеющая способность в ответ на команды системы управления динамически и в реальном времени: изгибаться вдоль хорды любым требуемым способом, изменять относительное положение точки поворота, изменять свою форму в плане благодаря выдвижению или втягиванию задней кромки, которое можно выполнить различно справа или слева, поворачивать закрылок вдоль задней кромки в том или другом направлении или позволить ему поворачиваться под действием потоков. Данная лопасть также при необходимости оснащается одной или несколькими упругими задними кромками, жесткость которых изменяется системой управления динамически и, если необходимо, различно вдоль профиля лопасти. Для реверса передней и задней кромок в целях эксплуатации в режиме обратного воздушного потока или в других случаях лопасти снабжены кромками, которые могут становиться жесткими при работе в качестве передней кромки и гибкими при работе в качестве задней кромки. Также лопасти оснащаются возможностью регулирования толщины профиля поперечного сечения и изменения его формы. Также лопасти получают проницаемость к прохождению потока по команде вдоль большой части своей поверхности. В результате каждая лопасть, контролируемая системой управления, постоянно и оптимально подстраивается под текущие условия работы и максимально эффективно используется при движении по траектории при каждом обороте ротора. 2 н. и 17 з.п. ф-лы, 10 ил.

Формула
Документы, цитированные в отчёте о поиске
Гребной винт со съемными лопастями (варианты)
Комментарии