Способ автоматического размагничивания кораблей - RU2703765C1
Код документа: RU2703765C1
Чертежи
Описание
Изобретение относится к области размагничивания кораблей для защиты их от неконтактных магнитных мин и магнитных средств обнаружения.
В годы второй мировой войны неконтактные (магнитные) мины проявили себя как простое и эффективное оружие против подводных лодок, кораблей и судов [1. Ткаченко Б.А. История размагничивания кораблей советского Военно-Морского Флота. Л. Наука. 1981], [2. Семенов В.Г. Две истории размагничивания кораблей. СПб. Издательство «Диалог». 2008]. Сохраняется минная опасность на море и в наше мирное время, поскольку мины могут использовать террористы.
Для защиты от магнитных мин на кораблях используют встроенные обмотки с электрическими токами для размагничивания / снижения / компенсации остаточного магнитного поля (МП) корабля (МПК) [3. Терехов И.Н. Дегауссинг и девиация компасов. М. Морской транспорт. 1945], а также специальные немагнитные материалы и маломагнитные стали.
Процедуру определения требуемых токов размагничивания называют калибровкой обмоток размагничивания (ОР). Вопросы размагничивания кораблей (РК) и калибровки ОР всегда были и остаются предметом дискуссий. Например, в 1946 г. англичане, которые в годы войны использовали малое число ОР (1-6) на один корабль, снисходительно критиковали немцев за то, что те использовали до 33 ОР на корабль. По их мнению, такое обилие ОР говорило о недопонимании немцами проблемы РК [2]. Однако, в 70-е годы число ОР на английских противоминных кораблях превышало 30 [4. A Review of Degaussing Systems and DG Measurement Ranges. Maritime Defence. December 1979. v. 4 #12 Р. 494].
Известен способ размагничивания надводных кораблей [5. Degaussing equipment for surface ships. International Defense Review. 1979 V. 12 #3 P. 433], где используют трехкомпонентный датчик на вершине мачты корабля для измерения магнитной индукции (МИ) МП Земли (МПЗ) для управления токами ОР.
Известен способ РК британской фирмы Thorn EMI Electronics [6. New on-board degaussing system for ships. Maritime Defence. 1990. V. 15 #1. Р21]. Способ использует бортовую базу данных МПЗ, с помощью которой по курсу и географическому местоположению корабля определяют оптимальные токи в секциях ОР.
Известна также система компенсации МПК [7. В.А. Могучий и др. Совершенствование элементов системы компенсации магнитного поля корабля. Морская радиоэлектроника. №3 2003. С. 50-54], в которой используют навигационную базу данных корабля и средство измерения МПЗ для компенсации МПК с тремя ОР.
Способы [5], [6] и [7] относятся к так называемым разомкнутым системам РК, которые компенсируют отдельно индуктивную и постоянную составляющие МПК, определенные при предварительной калибровке ОР корабля на специальном магнитоизмерительном стенде. Разомкнутые системы не могут учитывать временные изменения постоянного МПК, которое несмотря на свое название, подвержено изменениям в процессе плавания корабля. Разомкнутые системы не дают полного РК.
Известен также способ РК по замкнутой системе, который определяет и компенсирует изменения постоянного МПК [8 John J. Holmes. Reduction of a Ship's Magnetic Field Signatures. Morgan & Claypool Publishers. 2008].
В результате анализа перечисленных выше технических решений по совокупности существенных признаков ближайшим аналогом заявляемого способа принят способ [8].
Известный способ автоматического РК включает управление электрическими токами по результатам измерений бортовыми трехкомпонентными магнитометрами и постоянных по МИ (ПМИ) ОР в точках проходной характеристики, а также использование МИ МПЗ в системе координат корабля.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа является то, что известный способ не измеряет разность одноименных компонент каждого бортового магнитометра и МПЗ и не определяет постоянные ОР по МИ в точках бортовых магнитометров.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении точности РК.
Технический результат, получаемый при осуществлении заявляемого изобретения, заключается в непрерывной минимизации погрешности РК и в расширении возможностей контроля за каждой отдельной секцией ОР при плавании и настройке системы РК.
Указанный технический результат достигается тем, что заявляемый способ автоматического размагничивания корабля, включающий определение токов размагничивающих обмоток по результатам измерения магнитной индукции бортовыми трехкомпонентными магнитометрами, постоянных по магнитной индукции размагничивающих обмоток, а также индукции МПЗ в системе координат корабля, отличается тем, что токи определяют из условия минимизации суммы квадратов разностей одноименных компонент каждого бортового магнитометра и МПЗ, а постоянные по магнитной индукции обмоток определяют для точек размещения датчиков бортовых магнитометров.
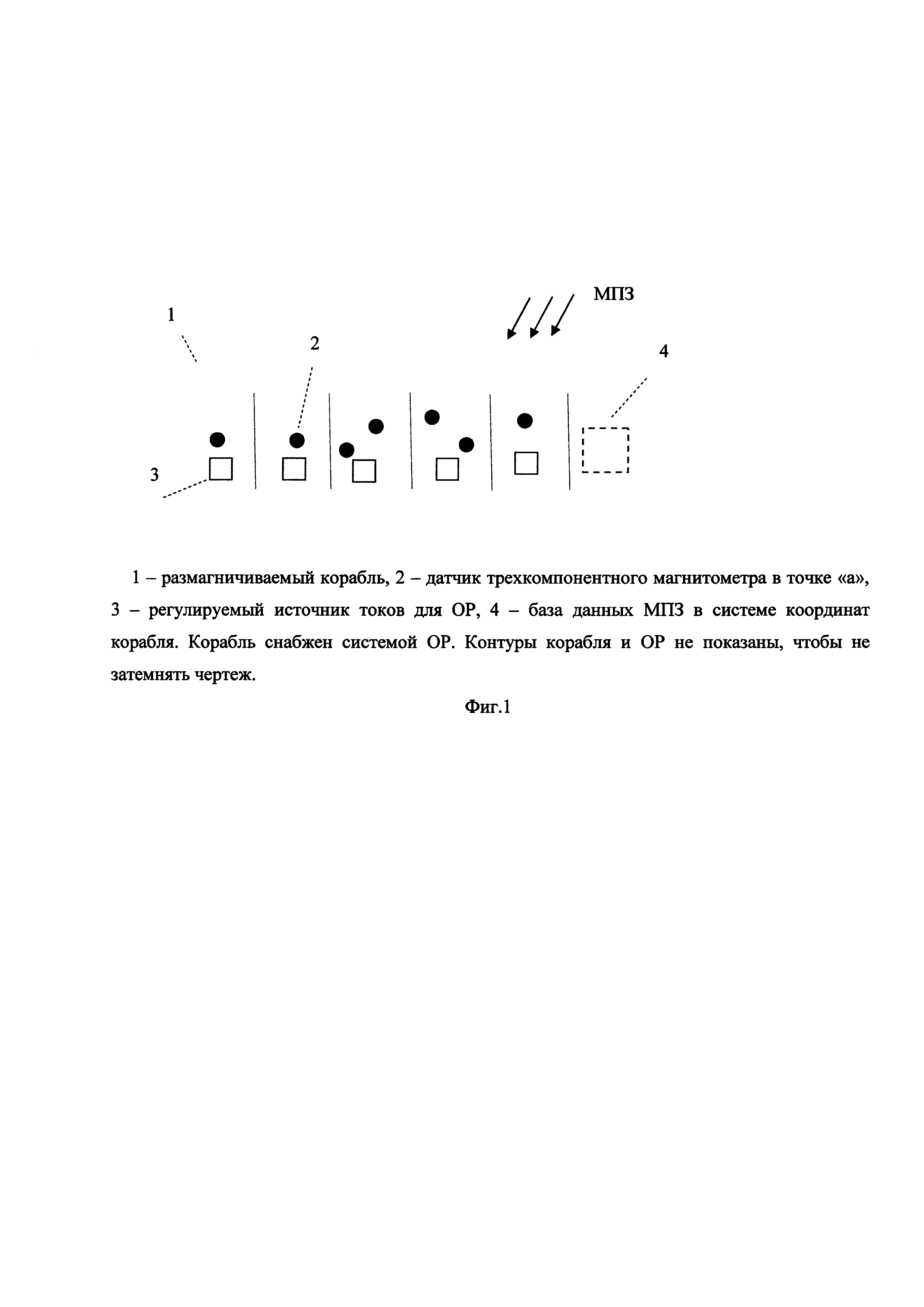
На Фиг. 1 изображена схематически система РК по заявляемому способу, которая включает: 1 - корабль (объект размагничивания) с «р» ОР, индекс ОР 1, 2, …m…p; 2 - датчик трехкомпонентного магнитометра в точке а=1, 2…n…q, где q - общее количество датчиков; q≥р; 3 - регулируемый источник токов для каждой ОР; 4 - бортовая база данных МПЗ. На Фиг. 1 контуры корабля и ОР не показаны, чтобы не затемнять чертеж.
Заявляемый способ РК действует по аналогии с общим выражением погрешности измерения физической величины

где ΔА - погрешность измерения;

Представим себе силовую линию индукции МПЗ. Она непрерывна. Вдали от корабля она (почти) прямая. С приближением к намагниченному кораблю она искривляется, причем на борту искривление сильнее, чем за бортом. Степень искривления несет информацию о намагниченности корабля. Но силовая линия не содержит информации о величине МИ.
Показания бортового датчика, которые несут в себе информацию о величине и направлении МИ в каждой точке «а», интерпретируют как результаты измерения МПЗ, искаженные (иногда очень сильно) влиянием всего корабля на эту точку. Токи ОР подбирают так, чтобы по возможности снизить искажения везде, прежде всего на борту, поскольку за бортом они снижаются автоматически.
При идеальном РК силовые линии МПЗ должны проходить сквозь корабль без искажений. Тогда корабль становится прозрачным для МПЗ и незаметным для магнитных мин и средств его обнаружения по магнитному полю.
По аналогии с моделью (1) запишем соотношение для погрешности измерения МИ МПЗ или погрешности РК в точке «а»

где



ВЗ - МИ МПЗ (одно и тоже для всех точек);

I=(I1; I2; … Im; … Ip;) - вектор-столбец (p×1) токов ОР.
Для определения вектор-столбца ПМИ «m» ОР в точке «а», через обмотку «m» пропускают нормированный ток прямой и обратной полярности ±I0, измеряют соответствующие МИ бортовым магнитометром с датчиком в точке «а» и вычисляют искомые ПМИ по формуле

Согласно уравнению (2), для одного датчика «а» токи размагничивания выбирают так, чтобы минимизировать погрешность РК

По аналогии с (4) для всех датчиков находят токи I, снижающие погрешности РК методом наименьших квадратов по формуле

где С - матрица (3q×p) ПМИ всех ОР для всех бортовых датчиков;
CT - транспонированная матрица С (p×3q);
α - параметр регуляризации;
E - единичная матрица (р×р);
Как следует из (5), в заявляемом способе для определения токов ОР используют оба типа векторов МИ одновременно:
В известном способе [8] РК организуют по уравнению похожему на (4), но только с одним типом векторов МИ в правой части (5) и по ПМИ ОР не в точках расположения датчиков на борту, а в точках проходной характеристики.
Отметим также, что с помощью соотношения (4) контролируют эффективность каждой отдельной секции ОР в работе, либо в настройке для рационального выбора мест расположения датчиков и требуемого их количества.
Реферат
Изобретение относится к области размагничивания корабля для защиты от магнитных мин и магнитных средств его обнаружения. Для автоматического размагничивания корабля включают определение токов размагничивающих обмоток по результатам измерений магнитной индукции бортовыми трехкомпонентными магнитометрами, постоянных размагничивающих обмоток по магнитной индукции, а также индукции МПЗ в системе координат корабля. Токи определяют из условия минимизации суммы квадратов разностей одноименных компонент каждого бортового магнитометра и МПЗ, а постоянные по магнитной индукции обмоток определяют для точек размещения датчиков бортовых магнитометров. Достигается непрерывная минимизация погрешности размагничивания корабля во время плавания и расширение возможности контроля за каждой отдельной секцией при плавании и настройке системы размагничивания. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Источник питания для станций безобмоточного размагничивания кораблей
Комментарии