Управление беспилотным подводным транспортным средством под водой - RU2682072C2
Код документа: RU2682072C2
Чертежи







Описание
Настоящее изобретение относится к управлению беспилотным подводным транспортным средством под водой, например, при использовании оборудования, уже расположенного на дне, для добычи нефти и газа.
Зачастую во время подводных работ необходимо выполнить задания, такие как проверка, контроль, обслуживание или строительство. Ниже доступной водолазу глубины такие задания обычно выполняют посредством беспилотных подводных транспортных средств, таких как дистанционно управляемые транспортные средства и автономные подводные транспортные средства (АПТС).
Дистанционно управляемые транспортные средства отличаются тем, что они физически соединены с надводным судном поддержки посредством кабеля связи, по которому передают энергию и данные, включая управляющие сигналы. Их обычно разделяют на рабочие дистанционно управляемые транспортные средства или проверяющие дистанционно управляемые транспортные средства.
Рабочие дистанционно управляемые транспортные средства являются крупными и достаточно мощными для выполнения различных подводных заданий по обслуживанию и строительству, в целях чего они могут быть модифицированы посредством добавления специализированных платформ и инструментов модульным, взаимозаменяемым образом. Такие инструменты могут, например, включать инструменты, совершающие вращение, и инструменты, совершающие возвратно-поступательные движения, приводимые в действие гидравлическими или электрическими двигателями или приводами.
Проверяющие дистанционно управляемые транспортные средства имеют меньшие размеры, но являются более маневренными, чем рабочие дистанционно управляемые транспортные средства, и могут выполнять задания по проверке и контролю, а также могут выполнять несложные задания по обслуживанию, такие как чистка с использованием подходящих инструментов или приспособлений. В дополнение к визуальной проверке с использованием освещения и камер, проверяющие дистанционно управляемые транспортные средства могут удерживать датчики в контакте с подводной конструкцией, такой как трубопровод, или возле нее, для проверки и контроля ее состояния или других параметров.
Автономные подводные транспортные средства являются автономными, автоматизированными аналогами дистанционно управляемых транспортных средств. Автономные подводные транспортные средства в основном используют в качестве проверяющих дистанционно управляемых транспортных средств для выполнения заданий по проверке и контролю под водой. Однако автономные подводные транспортные средства время от времени используют или предполагают использовать для заданий, связанных с вмешательством под водой, как те, что выполняют посредством рабочих дистанционно управляемых транспортных средств. Автономные подводные транспортные средства, которые имеют возможность выполнения заданий с вмешательством под водой, могут быть названы автономными транспортными средствами для вмешательств. Однако для простоты в материалах настоящей заявки будет использован общий термин "автономное подводное транспортное средство".
Автономные подводные транспортные средства переходят от одного задания к другому по запрограммированному курсу в ограниченные промежутки времени без физического соединения со вспомогательным объектом, таким как надводное судно поддержки. Они имеют большие бортовые аккумуляторы для достаточной продолжительности работы, но им необходимо совершать частые заходы на поверхность или к подводной корзине, на станцию обслуживания или в док для зарядки аккумулятора.
Во избежание необходимости выполнения беспилотным подводным транспортным средством длительного захода на поверхность, когда необходимо произвести замену инструментов или датчиков, набор инструментов или датчиков может храниться в размещающей корзине, которая опущена к подходящему месту, находящемуся под водой. Беспилотное подводное транспортное средство может забирать и переносить подходящий инструмент или датчик из размещающей корзины к месту работ.
Существует необходимость повышения автономности систем на основе автономных подводных транспортных средств для усовершенствования их способности к выполнению проверки и контроля элементов подводных установок для добычи нефти и газа. Также может иметь место преимущество в виде усовершенствования способности автономных подводных транспортных средств к выполнению вмешательств под водой.
Любое из решений данной задачи должно быть легко применимо к существующим подводным установкам, предпочтительно без необходимости выполнения операций по модернизации.
На данный момент автономные подводные транспортные средства необходимо возвращать на поверхность, или обратно к корзине, или на станцию обслуживания, соединенную с надводным судном поддержки. Как следствие, автономные подводные транспортные средства не обладают идеальной автономностью: им все еще обычно необходимо наличие надводного судна поддержки.
Автономные корзины могут не вырабатывать достаточно энергии для одновременной зарядки автономного подводного транспортного средства и надежного обмена данными с объектом на поверхности, особенно на сверхбольшой глубине, а именно на глубине более, чем 2500 метров. Все еще необходимо физическое жесткопроводное соединение для подачи электроэнергии от объекта на поверхности и для связи с объектом на поверхности для снижения риска потери связи. В связи с этим, обычное ограничение расстояния для эффективной беспроводной широкополосной связи в воде составляет около 200 метров.
Все больше и больше подводных конструкций, связанных с областями добычи нефти и газа, содержат питаемое при помощи электричества оборудование, такое как насосы или управляющие системы. Данные конструкции и их системы обычно содержат системы электропитания и цифровые системы, которые взаимодействуют с другими подводными конструкциями и которые соединены с объектом на поверхности при помощи связующей сети.
Приспособления для связи обычно содержат резервные электрические кабели, которые при необходимости могут быть использованы настоящим изобретением.
В US 8109223 раскрыто использование корзины и автономного подводного транспортного средства, где корзину используют в качестве базы для задач автономного подводного транспортного средства. Однако, корзина остается соединенной с надводным судном.
В WO 2007/143457 автономное подводное транспортное средство запускают с расположенного на поверхности управляющего устройства. Подводные установки, находящиеся на дне, соединены с управляющим устройством и используются в качестве источников питания и связных передатчиков для автономных подводных транспортных средств. Это не удовлетворяет требования изобретения, так как подводные установки не используются для режима ожидания автономного подводного транспортного средства и все также должны быть соединены с поверхностью.
В US 6223675 раскрыта подводная рабочая система, которая содержит систему управления кабелем, соединенную с подводной конструкцией для передачи энергии и данных, и связанное по кабелю неавтономное дистанционно управляемое транспортное средство, постоянно соединенное с указанной кабельной системой управления. Дистанционно управляемое транспортное средство также может быть прикреплено к системе управления кабелем. Кабель связи ограничивает возможное перемещение дистанционно управляемого транспортного средства, которое не является автономным транспортным средством. В качестве необязательного условия, данные дистанционно управляемые транспортные средства могут использоваться для поддержки и подзарядки автономного подводного транспортного средства, но дистанционно управляемое транспортное средство не является пусковой корзиной для автономного подводного транспортного средства. Между задачами автономное подводное транспортное средство, обслуживаемое дистанционно управляемым транспортным средством, должно возвращаться на станцию обслуживания или надводное судно, которое отделено от дистанционно управляемого транспортного средства.
В US 6808021 раскрыто использование одной подводной станции обслуживания в качестве базы для автономного подводного транспортного средства, используемого для проверки и обслуживания подводных устьев скважин. Устья скважин содержат доковые станции для подзарядки автономного подводного транспортного средства и осуществления связи. Данная система имеет недостаток в том, что устья скважин должны быть изначально выполнены с доковыми станциями: система не может быть развернута на существующих площадках. Доковые станции не являются корзинами: они не могут быть использованы для управления автономным подводным транспортным средством и его инструментами.
В US 6167831 раскрыто несущее судно, которое переносит летающее средство от станции на поверхности к подводной конструкции, расположенной на дне. Несущее судно является автономным и соединяется с подводной конструкцией для приема от нее питания и данных. Летающее средство остается соединенным с несущим судном кабелем связи, который обеспечивает подачу энергии и данных на летающее средство, пока его используют для соединения вместе двух участков трубы на дне. Энергия необходима, так как летающее средство не является автономным. Таким образом, летающее средство является дистанционно управляемым транспортным средством, а не автономным подводным транспортным средством, и, следовательно, несущее средство не является корзиной дистанционно управляемого транспортного средства.
На фоне этого разработано настоящее изобретение.
В общих чертах, изобретение заключается в способе повышения доступности системы для проверки и обслуживания подводного оборудования для добычи нефти и газа посредством по меньшей мере одного автономного подводного транспортного средства. В предпочтительных вариантах реализации способ включает:
опускание по меньшей мере одной корзины, переносящей автономное подводное транспортное средство, на дно возле ранее установленной подводной конструкции, которая электрически соединена с объектом на поверхности, таким как добывающий блок, который представляет собой платформу или судно, для обеспечения подводной конструкции питания и двустороннего обмена данными;
удаленное соединение корзины, или каждой корзины, с подводной конструкцией, посредством протягивания кабеля питания и обмена данными в направлении подводной конструкции, причем кабель предпочтительно уже соединен с корзиной;
соединение дальнего или свободного конца кабеля с подводной конструкцией, например, с использованием средства для передачи энергии и данных, уже установленного в качестве части подводной конструкции, для осуществления энергетического соединения и соединения для обмена данными между корзиной и подводной конструкцией, тем самым обеспечивая корзине доступ к системам передачи энергии и данных, обеспечиваемых подводной конструкции надводным судном;
использование энергии и данных, направляемых от объекта на поверхности через подводную конструкцию для зарядки аккумуляторов автономного подводного транспортного средства, переносимого корзиной, и для программирования или опроса автономного подводного транспортного средства;
выполнение задач автономного подводного транспортного средства, которые обычно включают: перелет автономного подводного транспортного средства из корзины в место назначения; проверку или обслуживание процесса или оборудования в месте назначения;
в то же время обмен данными между автономным подводным транспортным средством и корзиной при помощи системой подводной удаленной связи; перелет автономного подводного транспортного средства обратно в корзину; прикрепление автономного подводного транспортного средства к корзине; подзарядка аккумулятора автономного подводного транспортного средства и обмен данными между прикрепленным автономным подводным транспортным средством и корзиной; и нахождение под водой между последовательными задачами.
Между выполнением задач автономное подводное транспортное средство может оставаться прикрепленным в корзине на дне. Корзина и автономное подводное транспортное средство необходимо возвращать на поверхность при помощи подводного судна поддержки только для периодического обслуживания корзины и/или автономного подводного транспортного средства.
Если не установлен проходящий через толщу воды канал связи, автономное подводное транспортное средство может работать автономно, выполняя свои задания в нормальном режиме. Однако, если автономное подводное транспортное средство находится в пределах узла связи системы подводной удаленной связи, то данный узел может быть использован для связи с автономным подводным транспортным средством или для управления им, при необходимости.
Настоящее изобретение обеспечивает длительное, по существу постоянное размещение и управление системой автономного подводного транспортного средства на подводной инфраструктуре без необходимости значительной модификации данной инфраструктуры. Для этого изобретение адаптирует существующую пусковую корзину автономного подводного транспортного средства и соединяет ее с инфраструктурой для обеспечения питания корзине и, в качестве необязательного условия, обмена данными к корзине и от нее.
Одним представлением идеи изобретения является способ управления автономным подводным транспортным средством в месте, находящемся под водой. Согласно данному способу: опускают по меньшей мере одну корзину к месту, находящемуся под водой возле по меньшей мере одной установленной ранее подводной конструкции, которая имеет средства обеспечения корзины электрической энергией; в указанном месте, находящемся под водой, корзину, или каждую из корзин, соединяют с подводной конструкцией для приема от нее электрической энергии посредством обеспечения прохождения кабеля питания от корзины в направлении подводной конструкции; и используют электрическую энергию, направляемую посредством подводной конструкции, для зарядки аккумуляторов автономного подводного транспортного средства, прикрепленного к корзине. Электрическую энергию, например, могут подавать к подводной конструкции от объекта на поверхности.
Способ согласно настоящему изобретению предпочтительно также включает осуществление обмена данными с автономным подводным транспортным средством, включая передачу программирующих и управляющих данных на автономное подводное транспортное средство и/или прием ответных данных от автономного подводного транспортного средства. Например, ответные данные могут содержать данные изображения или видео, представляющие изображения, видимые автономным подводным транспортным средством.
Обмен данными предпочтительно выполняют автономным подводным транспортным средством при помощи корзины. В данном случае, обмен данными подходящим образом выполняют между корзиной и подводной конструкцией, и между подводной конструкцией и объектом на поверхности. Оттуда обмен данными могут выполнять при помощи удаленной станции, предпочтительно расположенной на суше, в которой может быть расположен оператор автономного подводного транспортного средства.
Электрическую энергию могут подавать от подводной конструкции к корзине при помощи обычного соединительного элемента, такого как перемычка, а также осуществлять обмен данными между подводной конструкцией и корзиной.
Обмен данными осуществляют подходящим образом между автономным подводным транспортным средством и корзиной, пока автономное подводное транспортное средство прикреплено к корзине. Например, данные, сохраненные автономным подводным транспортным средством во время выполнения задачи, могут быть переданы к корзине, когда автономное подводное транспортное средство прикреплено к корзине. Как бы то ни было, обмен данными предпочтительно осуществляют между автономным подводным транспортным средством и корзиной, пока автономное подводное транспортное средство не прикреплено к корзине, наиболее предпочтительно, при помощи беспроводного соединения между автономным подводным транспортным средством и корзиной. Когда обмен данными с автономным подводным транспортным средством выполняют беспроводным образом, автономное подводное транспортное средство может работать автономно при отсутствии эффективного сигнала беспроводного обмена данными. Как бы то ни было, обмен данными между автономным подводным транспортным средством и корзиной могут осуществлять при помощи кабельного соединения между ними.
Преимущественно автономное подводное транспортное средство может перемещаться вокруг сети с сетчатой структурой подводных узлов обмена данными, соединенных для обмена данными с объектом на поверхности, при этом каждый из данных узлов выполнен с возможностью осуществления обмена данными между автономным подводным транспортным средством и объектом на поверхности, когда автономное подводное транспортное средство находится в диапазоне беспроводного обмена данными данного узла.
Обмен данными с автономным подводным транспортным средством могут осуществлять посредством заранее установленной подводной конструкции или подводного узла обмена данными заранее установленной подводной конструкции, вместо обмена данными между автономным подводным транспортным средством и корзиной или в дополнение к ней.
Возможно, чтобы по меньшей мере одна корзина автономного подводного транспортного средства была опущена к месту, находящемуся под водой, без прикрепленного к ней автономного подводного транспортного средства. Также возможно, по меньшей мере одно автономное подводное транспортное средство прикреплялось и осуществляло связь с любой из множества корзин автономного подводного транспортного средства.
Идея изобретения также может быть представлена в виде системы для управления автономным подводным транспортным средством в месте, находящимся под водой. Система содержит: по меньшей мере одну подводную конструкцию, которая является частью добывающей установки, заранее установленной на дне, при этом конструкция имеет средства обеспечения ее электрической энергией; по меньшей мере одну корзина автономного подводного транспортного средства, которая выполнена отдельно от подводной конструкции и опущена к месту, находящемуся под водой, возле подводной конструкции; и соединительный элемент, проходящий между корзиной и подводной конструкцией, через который обеспечена возможность приема корзиной электрической энергии от подводной конструкции для питания автономного подводного транспортного средства, прикрепленного к корзине. Соединительный элемент заранее установлен на корзине и выполнен с возможностью выдвижения из положения хранения в корзине в развернутое положение, для прохождения между корзиной и подводной конструкцией.
Система в соответствии с изобретением подходящим образом также содержит объект на поверхности, от которого могут подавать электрическую энергию к подводной конструкции. По меньшей мере один беспроводной передатчик или кабель могут быть обеспечены для осуществления обмена данными с автономным подводным транспортным средством, при этом передатчик или кабель подходящим образом действует между автономным подводным транспортным средством и корзиной.
Идея изобретения также охватывает корзину автономного подводного транспортного средства, которая выполнена с возможностью использования в способе или системе по настоящему изобретению. В частности, в соответствии с настоящим изобретением, корзина автономного подводного транспортного средства, выполненная с возможностью опускания к месту, находящемуся под водой, содержит заранее установленный соединительный элемент, который выполнен с возможностью выдвижения в месте, находящемся под водой, из положения хранения в корзине в развернутое положение, для прохождения между корзиной и подводной конструкцией, от которой обеспечена возможность приема корзиной электрической энергии через соединительный элемент. Данный соединительный элемент подходящим образом также выполнен с возможностью осуществления обмена данными между корзиной и подводной конструкцией.
Для упрощения понимания настоящего изобретения, в качестве примера приведена ссылка на прилагаемые чертежи, на которых:
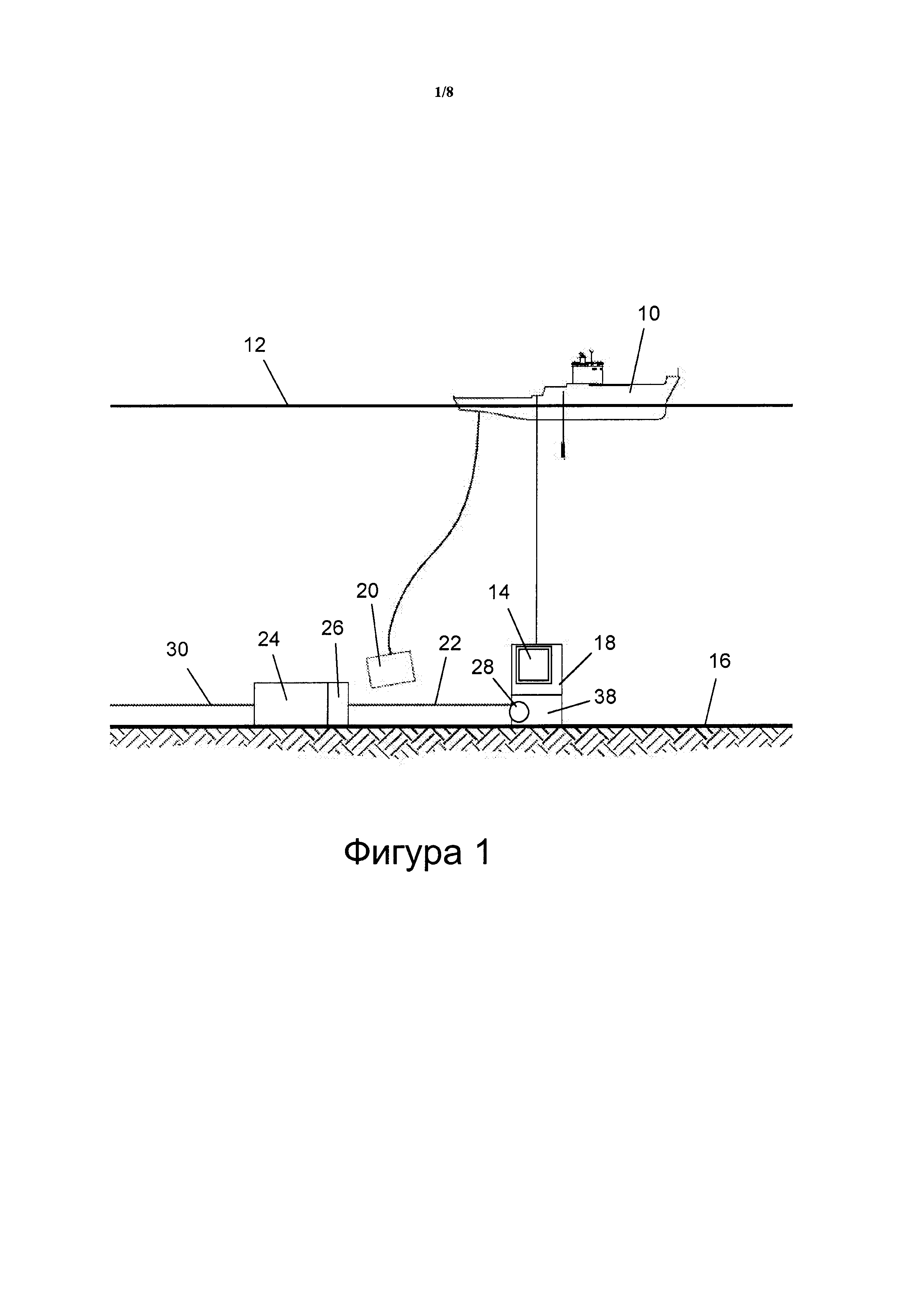
на фиг. 1 показан схематичный вид сбоку пусковой корзины, содержащей автономное подводное транспортное средство, которую опустили на дно от судна поддержки дистанционно управляемого транспортного средства, и которая соединена посредством перемычки с подводной инфраструктурой в соответствии с настоящим изобретением;
на фиг. 2 показана диаграмма, на которой представлено осуществление связи между берегом и акваторией посредством спутника;
на фиг. 3 показан общий схематичный вид монитора, который является частью пульта оператора на управляющем объекте или в удаленном местоположении в системе по настоящему изобретению;
на фиг. 4 показан схематичный вид сбоку автономного подводного транспортного средства, удаленного от пусковой корзины для выполнения операции по проверке, находясь в связанном по кабелю состоянии;
на фиг. 5 показан схематичный вид сбоку автономного подводного транспортного средства, удаленного от пусковой корзины и выполняющего операцию по проверке, находясь в несвязанном по кабелю состоянии;
на фиг. 6 показан схематичный вид сбоку автономного подводного транспортного средства, взаимодействующего с передатчиком на удаленном объекте подводного оборудования как с частью сети с сетчатой структурой;
на фиг. 7 показан схематичный вид сбоку автономного подводного транспортного средства, возвращающегося в пусковую корзину в конце задачи для зарядки и, в качестве необязательного условия, перепрограммирования;
на фиг. 8 показана блок-схема некоторых важных этапов способа по настоящему изобретению;
на фиг. 9 показан схематичный вид сбоку системы по настоящему изобретению, выполненной в виде сети с сетчатой структурой; и
на фиг. 10 показан схематичный вид в перспективе подводной установки, оборудованной системой по настоящему изобретению, в данном случае выполненной со множеством корзин, между которым автономное подводное транспортное средство может перемещаться для зарядки, при прикреплении, и для обмена данными.
Обращаясь к фиг. 1, судно 10 поддержки дистанционно управляемого транспортного средства на поверхности 12 опускает автономное подводное транспортное средство 14 на дно 16 в пусковой корзине 18. В качестве примера, вода в данном месте может иметь 3000 метров в глубину и, следовательно, расцениваться в отрасли подводной добычи нефти и газа как сверхглубокая. Дистанционно управляемое транспортное средство 20, связанное по кабелю с судном 10, затем соединяет перемычку 22, проходящую поперек или по дну 16, для перекрытия промежутка между пусковой корзиной 18 и ближайшей заранее установленной подводной инфраструктурой 24, такой как добывающее оборудование. В качестве одного из многих примеров, подводная инфраструктура 24 может представлять собой систему трубопроводов, хотя и не обязательно является ею.
В частности, перемычка 22 соединена со средством 26 для передачи энергии и данных на подводной инфраструктуре 24. Средство 26 для передачи энергии и данных может представлять собой обычное средство, которое обычно выполнено на подводном оборудовании для соединения одного объекта оборудования с другим для передачи электрической энергии и данных.
В целях удобства, перемычка 22 заранее присоединена к пусковой корзине 18 на поверхности 12 для соединения со средством 26 для передачи энергии и данных на подводную инфраструктуру 24 при одной простой соединительной операции при достижении дна 16. Например, перемычка 22 может храниться на барабане 28 на пусковой корзине 18 для вытягивания ее с барабана 28 в протяженную или развернутую конфигурацию для соединения со средством 26 для передачи энергии и данных подводной инфраструктуры 24. Перемычка 22 также может быть описана в уровне техники как связующее звено или летучая направляющая.
После завершения пуско-наладочных проверок, судно 10 поддержки дистанционно управляемого транспортного средства извлекает дистанционно управляемое транспортное средство 20 и удаляется для других задач.
В данном примере, связующее звено 30 подает энергию и передает данные от управляющего объекта 32 на подводную инфраструктуру 24. Управляющий объект 32 может, например, представлять собой плавучую систему нефтедобычи, хранения и выгрузки на поверхности 12, как показано на фиг. 2. Управляющий объект 32 может сообщаться с удаленной станцией 34, чаще всего при помощи спутниковой широкополосной системы 36. Любая такая удаленная станция 34 обычно, но не обязательно, расположена на суше. Система берег-акватория показана на фиг. 2, при том, что береговые элементы показаны слева, а элементы в акватории показаны справа.
Перемычка 22, которая соединяет пусковую корзину 18 с подводной инфраструктурой 24, подает энергию от подводной инфраструктуры 24 на пусковую корзину 18, а также выступает в роли двунаправленного канала связи для обмена данными между подводной инфраструктурой 24 и пусковой корзиной 18.
Пусковая корзина 18 модифицирована из стандартной конструкции путем добавления соответствующего модуля 38 взаимодействия. Модуль 38 взаимодействия действует в качестве шлюза для двустороннего обмена данными посредством перемычки 22 между автономным подводным транспортным средством 14 и подводной сетью данных, которая содержит подводную инфраструктуру 24. Для выполнения данной функции шлюза, модуль 378 взаимодействия обеспечивает взаимодействие модема связи корзины 18 с подводной сетью данных. Модем связи обычно выполнен с возможностью переноса данных оптической связи, как описано ниже.
Модуль 38 взаимодействия также буферизирует энергию, подаваемую через перемычку 22, для облегчения зарядки бортовых аккумуляторов автономного подводного транспортного средства 14, когда оно прикреплено к пусковой корзине 18 для зарядки широко известным образом. Таким образом, например, модуль 38 взаимодействия преобразует напряжение питания подводной добычи от подводной инфраструктуры 24 для обеспечения возможности капельной зарядки аккумуляторов автономного подводного транспортного средства 14 или промежуточных аккумуляторов пусковой корзины 18.
Оператор 40 может быть расположен на порту управляющего объекта 32 на поверхности или в удаленной станции 34. Таким образом, обмен данными между оператором 40 и автономным подводным транспортным средством 14, соединенным с пусковой корзиной 18, осуществляется посредством связующего звена 30, подводной инфраструктуры 24 и перемычки 22. В совокупности, таким образом, связующее звено 30, подводная инфраструктура 24 и перемычка 22 представляют собой элементы канала связи между оператором 40 и автономным подводным транспортным средством 14. Еще одним элементом указанного канала связи является соединение для обмена данными между автономным подводным транспортным средством 14 и пусковой корзиной 18, как будет описано ниже. Канал связи может также содержать соединение для обмена данными между управляющим объектом 32 и удаленной станцией 34, такое как спутниковая широкополосная система 36, как указано выше. В принципе также возможно проводное соединение для обмена данными между управляющим объектом 32 и удаленной станцией 34.
Данные, передаваемые по каналу связи, могут содержать данные по планированию задачи; данные плана задачи; данные удаленного обслуживания или диагностики или сигналы с неподвижными изображениями или видео, представляющие то, что автономное подводное транспортное средство 14 может видеть через свои бортовые камеры. Видеосигналы могут быть низкого разрешения или более высокого разрешения, в зависимости от ширины полосы, предусмотренной для различных последовательных элементов канала связи, наиболее критичным является соединения для обмена данными между пусковой корзиной 18 и автономным подводным транспортным средством 14.
Оператор 40 может планировать задачи в акватории на борту управляющего объекта 32 или на удаленной станции 34, которая может находиться на берегу, как показано на фиг. 2, в помещении, служащем в качестве центра планирования операций. На фиг. 3 показан монитор 42 пульта 44 оператора, который может находиться на управляющем объекте 32 или на удаленной станции 34 по необходимости. Множество автономных подводных транспортных средств во флоте могут поддерживаться и управляться с одного пульта 44. В данном случае оператор 40 может проводить пуско-наладочные проверки на системе, запускать проверочные задачи и планировать реальные задачи. Планы задач затем загружают на автономное подводное транспортное средство 14 посредством канала связи. Канал связи также используют для отправки останавливающих и запускающих команд на автономное подводное транспортное средство 14.
Пока имеется эффективный канал обмена данными между пусковой корзиной 18 и автономным подводным транспортным средством 14, оператор 40 может осуществлять телеавтоматическое управление автономным подводным транспортным средством 14 и направлять его в режим, родственный режиму динамического позиционирования дистанционно управляемого транспортного средства. Кроме того, ширина полосы обеспечивает возможность передачи потокового видео сигнала от камер, переносимых автономным подводным транспортным средством 14, обратно на монитор 40 пульта 42 оператора посредством канала связи. Это позволяет автономному подводному транспортному средству оставаться на станции под телеавтоматическим управлением оператора 40, наблюдать за процессом под водой, за объектом подводного оборудования или выполнять задание при передаче изображений на поверхность. Таким образом, оператор 40 может наблюдать, контролировать и, при необходимости, управлять выполнением задач в реальном времени.
Обмен данными может быть осуществлен между автономным подводным транспортным средством 14 и пусковой корзиной 18 различными путями, в зависимости от того, связано ли автономное подводное транспортное средство 14 с пусковой корзиной 18 кабелем связи, или нет.
В связанном режиме, показанном на фиг. 4, кабель 46 связи между автономным подводным транспортным средством 14 и пусковой корзиной 18 содержит физическое соединение для обмена данными, такое как оптоволоконное соединение, для обеспечения управления автономным подводным транспортным средством 14 в реальном времени, родственного режиму динамического позиционирования дистанционно управляемого транспортного средства. Данное соединение также обеспечивает передачу видеосигналов. Само собой, длина кабеля 46 связи ограничивает диапазон перемещения или радиус работы автономного подводного транспортного средства 14 относительно пусковой корзины 18, при связанном режиме.
Приведенный в качестве альтернативы несвязанный режим, показанный на фиг. 5, основан на беспроводном соединении с автономным подводным транспортным средством 14. Это освобождает автономное подводное транспортное средство 14 от ограничений его перемещения, возникающие из-за длины кабеля 46 связи, хотя максимальный рабочий диапазон автономного подводного транспортного средства 14 при работе неавтономным или полуавтономным образом определен возможностями беспроводного канала для поддержки связи в реальном времени.
Беспроводная связь осуществляют посредством передатчика 48, который создает оптический широкополосный канал для обмена данными в свободном пространстве. Также может быть использован акустический канал для обмена данными, однако в данном случае он является менее предпочтительным ввиду его малой ширины полосы. Подводные оптические и акустические каналы связи хорошо известны в уровне техники и не их подробное раскрытие в настоящем описании не требуется.
Передатчик 48, который показан на фиг. 5, установлен на пусковой корзине 18, но вместо этого он может быть установлен на другом подводном оборудовании, которое, например, может образовывать часть подводной инфраструктуры 24, от которой пусковая корзина 18 принимает энергию.
В целом, автономное подводное транспортное средство 14 имеет возможность выполнения полностью автономных операций по проверке и обрабатывающих операций с перелетом к нужному месту. Это означает, что автономное подводное транспортное средство 14 может быть запрограммировано для выполнения задач полностью автономным образом, без вмешательства человека. Однако, вместо этого может быть выбран полуавтономный подход, включающий внимательный контроль в реальном времени в качестве вводной части для вмешательства человека в случае, когда такое вмешательство становится необходимым.
При приеме стартовой команды посредством канала связи от оператора 40 на поверхности, автономное подводное транспортное средство 14 автономным образом открепляется от пусковой корзины 18, как показано на фиг. 5, и начинает свою задачу. Данная задача может, например, предназначаться для выполнения проверки объекта подводного оборудования 50 или для контроля процесса под водой. Данная задача может быть полностью выполнена автономным или полуавтономным образом, в зависимости от диапазона и состояния канала связи между автономным подводным транспортным средством 14 и передатчиком 48, установленным на пусковой корзине 18 или на другом подводном оборудовании.
Например, в полуавтоматическом режиме, контроль автономного подводного транспортного средства 14 в реальном времени может быть обеспечен во время задачи в течение всего времени, пока автономное подводное транспортное средство 14 остается в пределах расстояния от передатчика 48, достаточно короткого для обеспечения эффективного беспроводного обмена данными в режиме реального времени. Если автономное подводное транспортное средство 14 перелетает за пределы расстояния от передатчика 48 при котором может быть обеспечена эффективный беспроводной обмен данными в режиме реального времени, то автономное подводное транспортное средство 14 работает полностью автономно вплоть до того времени, когда эффективный обмен данными будет восстановлена. Однако, оператор 40 может продолжить контролировать автономное подводное транспортное средство 14, пока оно работает полностью автономно, с использованием хорошо известной акустической технологии.
Для снижения пределов диапазона перемещения во время обеспечения эффективного беспроводного обмена данными в режиме реального времени, множество передатчиков 48 могут быть расположены вокруг подводной установки. Это обеспечивает работу автономного подводного транспортного средства 14 в подводной сети с сетчатой структурой, содержащей множество узлов, образованных передатчиками 48. Каждый передатчик 48 сети с сетчатой структурой имеет связанный отдельный канал связи с пультом 44 оператора, например, через перемычку для обмена данными на другой объект подводного оборудования и оттуда через связующее звено на поверхность.
Посредством использования сети с сетчатой структурой может быть создана и обеспечена связь в режиме реального времени между автономным подводным транспортным средством 14 и передатчиками 48, установленными на различных объектах подводного оборудования при перелете автономного подводного транспортного средства 14 вокруг подводной установки. В связи с этим, на фиг. 6 показан дополнительный передатчик 48, установленный на другом объекте подводного оборудования 52 в качестве примера. Этот объект подводного оборудования 52 может быть независим от подводной инфраструктуры 24, от которой пусковая корзина 18 принимает энергию, или может образовывать часть подводной инфраструктуры 24.
В этом примере объект подводного оборудования 52 питают и обеспечивают ему обмен данными посредством еще одного связующего звена 54.
Когда автономное подводное транспортное средство 14 собрало необходимые проверочные данные или контролируемый процесс или вмешательство закончено, автономное подводное транспортное средство 14 автономным образом возвращается для прикрепления к пусковой корзине 18 для подзарядки его бортовых аккумуляторов. На фиг. 7 показано автономное подводное транспортное средство 14 приближающееся к корзине 18. После того как аккумуляторы автономного подводного транспортного средства 14 достаточно заряжены, автономное подводное транспортное средство 14 остается прикрепленным к корзине 18 для ожидания дальнейших инструкций. Прикрепленное автономное подводное транспортное средство 14 может быть перепрограммировано при необходимости и затем перенаправлено для других задач.
В качестве необязательного условия, после прикрепления к пусковой корзине 18 автономное подводное транспортное средство 14 может выполнить полную загрузку сохраненных видеоданных, данных с сонара и навигационных данных, которые должны быть переданы посредством буфера данных модуля 38 взаимодействия корзины 18 по перемычке 22 через подводную инфраструктуру 24 и к связующему звену 28 для дальнейшего детального анализа или обработки на поверхности.
Для обеспечения понимания всей системы по настоящему изобретению, на фиг. 8 показано автономное подводное транспортное средство 14, открепленное от пусковой корзины 18 и перемещенное для проверки объекта подводной инфраструктуры 24, который обеспечивает энергию и обмен данными пусковой корзине 18 при помощи перемычки 22. Для приема энергии и переданных данных, объект подводной инфраструктуры 24 соединен посредством связующего звена 30 с управляющим объектом 32, которое в качестве примера в данном случае представляет собой надводное судно, такое как плавучая система нефтедобычи, хранения и выгрузки.
Во время проверочной задачи автономное подводное транспортное средство 14 принимает управляющие сигналы от оптического передатчика 48 пусковой корзины 18 и возвращает на него ответные сигналы и видеосигналы. Передатчик 48 на пусковой корзине 18 образует часть канала связи между автономным подводным транспортным средством 14 и оператором 40, который, как указано выше, может находиться на борту плавучей системы нефтедобычи, хранения и выгрузки, или может базироваться на удаленной станции 34, которая осуществляет связь с плавучей системой нефтедобычи, хранения и выгрузки.
На фиг. 8 показана блок-схема, в которой изложены различные этапы способа, описанного выше.
В примере, показанном на фиг. 9, в дополнение, удаленный объект подводного оборудования 52 также соединен с надводным судном посредством отдельного связующего звена 54 для приема энергии и переданных данных. Этот дополнительный удаленный объект подводного оборудования 52 содержит дополнительный передатчик 48, с которым автономное подводное транспортное средство 14 может осуществлять связь в качестве части сети с сетчатой структурой, в качестве альтернативы привязки для осуществления связи только с передатчиком 48 на пусковой корзине 18. Опять же, объект подводного оборудования 52 питают и обеспечивают обменом данными посредством еще одного связующего звена 54, которое может быть непосредственно соединено с управляющим объектом и 32 на поверхности, или не быть непосредственно соединено.
Наконец, на фиг. 10 показан другой вариант, в котором одна или более пустых пусковых корзин 18 может быть опущена на дно 16 для взаимодействия с автономным подводным транспортным средством 14 в последовательных операциях. В данном случае автономное подводное транспортное средство 14 показано осуществляющим навигацию между двумя отдельными корзинами 18 на дне 16. Однако, корзины 18 могут находиться в других местах, находящихся под водой; также может иметься более одного автономного подводного транспортного средства 14, перемещающегося между более, чем двумя корзинами 18, и взаимодействующего с ними.
На фиг. 10 управляющий объект 32, такой как плавучая система нефтедобычи, хранения и выгрузки, на поверхности 12 обеспечивает энергию и связь двум объектам подводного оборудования 56 на дне 16 посредством соответствующих связующих звеньев 30. Управляющий объект 32 также осуществляет связь над поверхностью 12 с удаленной станцией, которая не показана, например, беспроводным образом посредством спутниковой широкополосной системы, как описано выше.
В данном простом примере, две пусковые корзины 18, 18' опущены на дно 16 в раздельных местах, каждая возле каждого из соответствующих объектов подводного оборудования 56.
Соответствующие перемычки 22 соединяют корзины 18, 18' с находящимися рядом объектами подводного оборудования 56. Однако один объект подводного оборудования 56 может быть соединен двумя или более перемычками 22 с двумя или более такими корзинами 18, 18'.
Как сказано ранее, перемычки 22 подают энергию от объектов подводного оборудования 56 к соответствующим пусковым корзинам 18, 18'. Перемычки 22 также служат в качестве двунаправленных каналов связи для обмена данными между объектами подводного оборудования 56 и соответствующими корзинами 18, 18'. Каждая корзина 18, 18' имеет соответствующий передатчик 48 для осуществления беспроводного обмена данными с автономным подводным транспортным средством 14 через толщу воды.
На фиг. 10 показано автономное подводное транспортное средство 14, пересекающее пространство между пусковыми корзинами 18, 18', в частности, при перемещении от первой корзины 18 ко второй корзине 18'. Например, автономное подводное транспортное средство 14 может открепиться от первой корзины 18 после зарядки, перепрограммирования и/или скачивания данных, с целью выполнения одного или более заданий, и направиться ко второй корзине.
В данном случае, автономное подводное транспортное средство 14 позже снова прикрепится для дальнейшей зарядки, перепрограммирования и/или скачивания данных.
Пока автономное подводное транспортное средство 14 остается в приделах диапазона эффективной обмена данными передатчика 48 одной из корзин 18, 18', данная корзина 18, 18' может служить в качестве узла связи, посредством которого автономное подводное транспортное средство 14 может осуществлять связь и могут осуществлять связь с ним. В частности, посредством указанного узла автономное подводное транспортное средство 14 может принимать управляющие сигналы, поданные оператором на поверхности, и отвечать на них, и может возвращать ответные сигналы на поверхность посредством соответствующей перемычки 22, объекта подводного оборудования 56 и связующего звена 30, ведущего к управляющему объекту 32 на поверхности.
Если автономное подводное транспортное средство 14 перемещается за пределы диапазона эффективной обмена данными передатчика 48 корзин 18, 18', а также за пределы диапазона эффективной обмена данными любого другого передатчика (не показанных на фиг. 10), который может располагаться в другом месте, находящемся под водой, в качестве часть сети с сетчатой структурой, автономное подводное транспортное средство 14 переключается в автономный режим работы. Автономное подводное транспортное средство 14 остается в автономном режиме работы, тем не менее оставаясь под контролем акустическим образом, пока оно снова не вернется в пределы диапазона эффективной обмена данными передатчика 48, который может являться другим передатчиком 48 системы, например, передатчиком 48 второй корзины 18'. При необходимости, автономное подводное транспортное средство 14 затем может снова принять управляющие сигналы, поданный оператором на поверхности, и ответить на него, и может отправить ответные сигналы на поверхность.
Хотя настоящее изобретение обеспечивает длительное, по существу постоянное размещение и управление системой автономного подводного транспортного средства под водой посредством инфраструктуры, элементам системы может требоваться периодическое извлечение на поверхность для чистки и обслуживания. Например, может быть вычищено обрастание подводной части; могут быть заменены антикоррозийные аноды; и могут быть заменены или обслужены двигатели, гидравлические элементы пусковой корзины, датчики и другие движущиеся части. При необходимости, система или ее элементы могут быть выгружены для уменьшения времени простоя.
Множество различных вариантов возможны в пределах концепции изобретения. Например, перемычка 22, проходящая между пусковой корзиной 18 и подводной инфраструктурой 24, может быть установлена другим образом: перемычка 22 может быть заранее прикреплена к подводной инфраструктуре 24 или может быть установлена при последующих операциях. Однако, в приведенных выше вариантах реализации предусмотрено, что перемычка 18 может храниться в корзине 18, например, на барабане 28, как указано выше, и может быть постоянным образом электрически соединена с корзиной 18.
Использование дистанционно управляемого транспортного средства 20 также является необязательным условием, так как перемычка 22 может быть вытянута из пусковой корзины 18 и соединена с подводной инфраструктурой 24 посредством автономного подводного транспортного средства 14.
Перемычка 22 не обязательно должна содержать переносчик данных и, таким образом, может просто представлять собой электрический кабель, если данные могут передаваться удаленно между корзиной 18 и подводной конструкцией 24 или управляющим объектом 32 на поверхности.
Обеспечение может быть выполнено для хранения энергии на корзине для последующей передачи на прикрепленное автономное подводное транспортное средство. С практической точки зрения, система хранения энергии на корзине может заряжаться капельным образом медленно, но непрерывно в течении длительного периода времени. Однако, данная система хранения энергии может затем передавать энергию автономному подводному транспортному средству быстрее, когда автономное подводное транспортное средство прикреплено к корзине. Если ее емкость достаточно велика, система хранения энергии корзины потенциально может удерживать достаточно энергии для множества зарядок автономного подводного транспортного средства.
Реферат
Изобретение относится к управлению беспилотным подводным транспортным средством под водой. Для управления автономным подводным транспортным средством в месте, находящемся под водой, согласно способу опускают по меньшей мере одну корзину автономного подводного транспортного средства к месту, находящемуся под водой возле по меньшей мере одной заранее установленной подводной конструкции, которая имеет средства обеспечения ее электрической энергией. В указанном месте, находящемся под водой, корзину, или каждую из корзин, соединяют с подводной конструкцией или с каждой подводной конструкцией для приема от нее электрической энергии. Электрическая энергия направлена посредством подводной конструкции для зарядки аккумулятора автономного подводного транспортного средства, прикрепленного к корзине. Достигается повышенная доступность системы для проверки и обслуживания подводного оборудования для добычи нефти и газа. 3 н. и 31 з.п. ф-лы, 10 ил.
Комментарии