Способ и устройство для возврата подводного оборудования - RU2375247C1
Код документа: RU2375247C1
Чертежи











Описание
Изобретение относится к способу и устройству для возврата подводного оборудования, например оборудования, которое было размещено на дне моря во время исследований.
Оборудование может быть размещено (или заякорено) на дне моря или закреплено на тросах на глубине по ряду разнообразных причин. Например, оборудование часто располагают под водой во время подводного строительства, при проведении разведки месторождений нефти и минерального сырья, при проведении геологической разведки, при метеорологических наблюдениях и мониторинге океана, а также для содействия навигации судов. Стандартный способ возврата такого оборудования основан на использовании акустически активизируемых высвобождающих механизмов.
На фиг.1A (прототип) схематически показан известный приемник 2 электромагнитного поля, размещенный на дне 4 моря во время электромагнитных исследований и поднимаемый после окончания исследований с использованием известных способов подъема (см. патент Великобритании №2382875 [1]). Подобная система описана также в патенте США №5770945 [2]. Приемник 2 содержит главный корпус 6, снабженный антенной 12, корпусом 14 для инструмента и флотационным устройством 16. Флотационное устройство 16 содержит пару заполненных воздухом резервуаров. Главный корпус 6 присоединен к бетонному балластному грузу 8 посредством высвобождающего соединителя 10, содержащего акустический высвобождающий механизм. Приемник 2 располагают путем сбрасывания за борт с несущего судна (не показано). Балластный груз 8 является достаточным для преодоления плавучести флотационного устройства 16, и приемник 2 погружается и садится на дно 4 моря. Электромагнитные исследования могут затем выполняться с использованием приемника 2, с помощью которого производят сбор данных и запись их запоминающим устройством в корпусе 14. При типичном исследовании множество приемников распределяют по дну моря, в области, представляющей объект исследований.
Высвобождающий соединитель 10 способен высвобождаться в ответ на дистанционно передаваемый акустический сигнал. Таким образом, по окончании исследования, для подъема поднимаемых частей приемника 2 с несущего судна передают по радио соответствующий акустический сигнал, понуждая высвобождающий соединитель 10 к высвобождению.
На фиг.1B схематически показан приемник, представленный на фиг.1A, вскоре после активизации высвобождающего соединителя 10. При активизации высвобождающего соединителя 10 главный корпус 6 больше не связан с балластным грузом 8. Таким образом, главный корпус 6 всплывает на поверхность благодаря плавучести, обеспечиваемой с помощью флотационного устройства 16, как схематически показано стрелкой 20. На поверхности воды главный корпус может быть подобран несущим судном. Балластный груз 8 остается на дне моря.
Такой способ имеет ряд недостатков:
Во-первых, балластный груз 8 остается на дне моря, что приводит не только к увеличению стоимости повторной установки оборудования (так как каждый раз требуется использовать новый балластный груз), но и к экологическим последствиям.
Во-вторых, механизмы для акустического высвобождения не являются абсолютно надежными, что может приводить к возможности потери очень дорогостоящего оборудования (и данных, собранных в нем), закрепленного на дне моря. В таких случаях оборудование либо списывают как потерянное (с экологическими, а также финансовыми последствиями) либо извлекают, используя альтернативный способ. Один альтернативный способ заключается в волочении ловильного крюка по всей площади, где произошла потеря. Однако этот способ требует больших затрат времени и может приводить к повреждению структур морского дна как естественных, так и искусственных. Кроме того, в некоторых случаях, например вблизи чувствительных установок, таких, которые часто используют на месторождениях нефти, находящихся в разработке, применение этого способа может оказаться вообще неприемлемым. Другой альтернативный способ заключается в использовании дорогостоящих дистанционно управляемых подводных транспортных средств для подъема закрепленного на дне моря оборудования, хотя применение этих средств часто ограничено глубиной и/или грузоподъемностью. На мелководье могут быть использованы водолазы для прикрепления канатов к потерянному оборудованию. Однако этот способ также является дорогостоящим и требующим много времени.
В других примерах вместо балластного груза часть оборудования, подлежащая возврату, может быть прикреплена к фиксированному якорю на дне моря с использованием акустически высвобождаемого соединителя. Однако этот способ обладает теми же недостатками, которые описаны выше.
В некоторых случаях оборудование, подлежащее возврату, может быть не предназначено для размещения на дне моря, но может оказаться там непреднамеренно, например, из-за случайной утери или высвобождения от своего места крепления и может не содержать флотационного устройства. Так как оборудование не предназначено для размещения на дне моря с использованием дистанционного управления, то оно вероятнее всего не обеспечено системой возврата такого вида, которая показана на фиг.1A и 1B, так как такая система может быть дорогостоящей и массивной, которую не используют в обычных условиях. Таким образом, оборудование, утерянное упомянутым способом, может быть поднято только с использованием других средств, например ловильных, или с использованием дистанционно управляемых подводных транспортных средств и/или водолазов, как это описано выше.
В европейском патенте №1188662 [3] раскрыта плавная сеть, в которой можно вести механизированное транспортное средство для обеспечения возможности его возврата. Однако этим способом можно возвращать только транспортные средства с автономным источником питания с поверхности водного пространства и невозможно использовать для подъема оборудования, размещенного под водой.
В английском патенте №2279619 [4] раскрыт способ захвата плавающих объектов и аппарат для его осуществления. Этот способ также не может быть использован для подъема оборудования, размещенного под водой.
В патенте США №6843191 [5] раскрыты способы подъема погруженных объектов и устройство для осуществления подъема. Подъемную сеть направляют на предварительно размещенный объект с помощью ряда канатов, закрепленных на дне моря вблизи объекта. Затем морскую воду, окружающую объект, замораживают с помощью криогенной установки. После образования слоя льда вокруг объекта сеть закрывают вокруг него и объект поднимают на поверхность. Однако этот способ сложен и требуется известность места расположения объекта.
Краткое описание изобретения
Согласно первому аспекту изобретения создан способ возврата подводного оборудования, включающий следующие стадии: прикрепление зацепляемого элемента к оборудованию до размещения оборудования на дне моря, последующее размещение оборудования на дне моря, опускание сетки, поддерживаемой рамой, на оборудование для взаимного зацепления зацепляемого элемента и сетки и подъем рамы, сетки и оборудования, прикрепленного к ней, для возврата оборудования.
Этим способом можно обеспечить первичные средства для возврата модулей подводного оборудования или затонувшего объекта в случае, когда обычный способ возврата не применим. Кроме того, способ можно применять при использовании оборудования, не предназначенного для размещения под водой, которое случайно оказалось на дне, например, из-за падения. Этот способ пригоден потому, что дешевые и простые зацепляемые элементы могут быть прикреплены к любому оборудованию, которое может быть непреднамеренно сброшено, например, с надводного судна.
В отличие от обычных акустических высвобождающих систем, согласно способу исключается потребность в оставлении балластных грузов на дне моря и поэтому способ можно использовать как основное средство для возврата, когда особенно желательно исключить применение балластных грузов. Способ является более дешевым, безопасным и имеет менее строгие ограничения по глубине, чем способы возврата, основанные на использовании водолазов или дистанционно управляемых транспортных средств. Кроме того, применение способа наносит малые повреждения или не наносит их вообще существующим установкам и дну моря, с которого надлежит поднимать оборудование, в сравнении со способами, основанными на тралении захвата.
Способ можно использовать для возврата оборудования при глубине воды в диапазоне, например, по меньшей мере, от 100 м, 200 м, 300 м, 400 м, 500 м, 1000 м и 2000 м, с использованием или без использования передатчиков местоположения. Более конкретно способ был с успехом испытан при выполнении работ по возврату оборудования при глубине воды 1900 м без использования передатчиков местоположения. Однако не существует реальных практических ограничений применения способа по глубине, с которой можно возвращать оборудование, используя данный способ. Современную разведку месторождений обычно проводят на глубине воды 4000 м, и способ можно использовать на такой или большей глубине.
Рама может иметь подходящую площадь в определенном диапазоне. Площадь рамы может составлять не более 4 м2, но более предпочтительно, чтобы она составляла, по меньшей мере, 10 м2 или 20 м2. Площадь рамы может составлять даже 100 м2 или больше, но более типично она составляет 50 м2 или менее. Рама может также иметь ряд разнообразных форм (при рассмотрении в плане в развернутом состоянии), например форму квадрата, прямоугольника или другого многоугольника, или круга, или овала.
Способ можно использовать для возврата оборудования любого вида. Одно применение способа заключается в возврате приемников, размещенных во время проведения исследований, например электромагнитных приемников, размещенных во время электромагнитных исследований или сейсмических приемников, размещенных во время сейсмических исследований. При проведении исследований, подобных упомянутым выше, часто используют множество приемников, размещенных по большой площади дна водного пространства. Это означает, что для исследований часто требуется использование относительно большого количества приемников, которые надлежит размещать и возвращать. Кроме того, отдельный приемник обычно размещают и возвращают много раз в течение его операционного срока службы. Таким образом, надежный возврат приемников, используемых для исследований, особенно важен.
Способ может дополнительно включать мониторинг нагрузки, воздействующей на раму и сетку, для определения того, несут ли они вес оборудования. Например, данные об увеличении измеренной нагрузки при подъеме рамы и сетки в сравнении с нагрузкой, наблюдавшейся при их опускании, могут быть использованы для определения захвата оборудования сеткой посредством зацепляемого элемента и может ли оно быть поднято на поверхность. В частности, статическая нагрузка (т.е. нагрузка, наблюдающаяся во время паузы в ходе подъема или опускания, или при подъеме или опускании рамы с постоянной скоростью) наиболее чувствительна к изменениям веса, связанного с оборудованием, прикрепленным к сетке посредством зацепляемого элемента.
Например, подъемный механизм, вводимый в действие для подъема и опускания рамы и сетки в воду (например, лебедка и кран на борту судна), может быть снабжен датчиком нагрузки, предназначенным для измерения натяжения подъемного каната, прикрепленного к раме. В общем, проще располагать датчик нагрузки на конце подъемного каната на лебедке. Однако если вес подъемного каната значительный, то предпочтительно датчик нагрузки располагать на канате вблизи рамы и сетки (или на раме и/или сетке) так, чтобы вес каната не доминировал в измеряемой нагрузке.
Раму и сетку можно опускать и поднимать много раз в месте расположения оборудования для повышения вероятности взаимного зацепления зацепляемого элемента и сетки.
В случаях, когда не известно точное место расположения оборудования, способ может дополнительно включать поиск оборудования путем опускания и подъема рамы и сетки в различных местах до определения по увеличению нагрузки захвата оборудования сеткой посредством зацепляемого элемента и его готовность к подъему.
Для уменьшения риска повреждения оборудования во время поиска раму и сетку можно удерживать на высоте, превышающей высоту оборудования и прикрепленного к нему зацепляемого элемента, при перемещении рамы и сетки из одного места в другое.
Кроме того, расстояние между одним местом погружения и последующим местом погружения рамы и сетки можно выбирать таким образом, чтобы оно было меньше ширины рамы для предотвращения пропуска участка дна моря во время поиска. Размер рамы можно выбирать в соответствии с площадью района поиска, и площади могут быть обследованы более быстро и эффективно, чем при использовании традиционных ловильных способов.
Согласно второму аспекту изобретения создано устройство для возврата оборудования из водного пространства, содержащее раму, несущую сетку и зацепляемый элемент, выполненный с возможностью прикрепления к оборудованию, подлежащему возврату, до погружения в воду оборудования, и имеющий форму, обеспечивающую взаимное зацепление с сеткой при опускании сетки на зацепляемый элемент.
Устройство согласно второму аспекту изобретения можно использовать для осуществления способа согласно первому аспекту изобретения.
Зацепляемый элемент может иметь разные формы, например он может быть снабжен концом в форме наконечника стрелы или одним или несколькими крюками, или, например, зубцом.
Сетка может быть гибкой, например, связанной из полипропиленового каната или стального троса так, чтобы раму и сетку можно было легко разбирать и упаковывать таким образом, чтобы они занимали меньшую площадь, когда их не используют, например, при хранении на палубе судна. В альтернативном варианте исполнения сетка может быть жесткой, например при предположении подъема особенно тяжелых грузов.
Зацепляемый элемент может также быть снабжен флотационным устройством, чтобы поддерживать его ориентацию при погружении независимо от ориентации оборудования, к которому он прикреплен. Это способствует обеспечению соответствующего расположения зацепляемого элемента для зацепления с сеткой, когда заранее не известна ориентация, которую примет погружаемое оборудование на дне водного пространства. В альтернативном варианте исполнения (или дополнительно) можно использовать множество разнонаправленных зацепляющих элементов.
Зацепляемый элемент и/или рама, или сетка могут быть снабжены передатчиком положения. С его помощью можно способствовать ускорению возврата благодаря получению информации об абсолютном или относительном расположении зацепляемого элемента и рамы и сетки.
Согласно третьему аспекту изобретения создана установка, содержащая оборудование с прикрепленным зацепляемым элементом согласно второму аспекту изобретения.
Краткое описание чертежей
Для лучшего понимания изобретения и для пояснения действия объектов согласно изобретению даны ссылки на прилагаемые чертежи, приведенные в качестве примера, на которых изображено следующее:
фиг.1A схематически изображает сечение известного электромагнитного приемника, подлежащего возврату со дна моря;
фиг.1B изображает приемник, представленный на фиг.1A, вскоре после начала операции подъема;
фиг.2 - схематически сечение комплекта оборудования, подлежащего подъему со дна моря, и зацепляемый элемент устройства для возврата согласно варианту исполнения изобретения;
фиг.3 - схематически в перспективе вид рамы и сетки устройства согласно варианту исполнения изобретения, подлежащих использованию совместно с зацепляемым элементом, показанным на фиг.2;
фиг.4 - схематически судно, с которого ведут поиск подлежащего возврату оборудования, согласно варианту исполнения изобретения;
фиг.5 - схематически поверхность морского дна, где размещено оборудование, подлежащее возврату;
фиг.6 - схематически ситуация, подобная представленной на фиг.4, при которой вскоре будет начата операция по подъему оборудования;
фиг.7 - схематически ситуация, подобная представленной на фиг.6, при которой операция по подъему оборудования находится в ходе исполнения;
фиг.8 - зацепляемый элемент, представленный на фиг.2, взаимно зацепленный с сеткой, представленной на фиг.3, во время подъема оборудования;
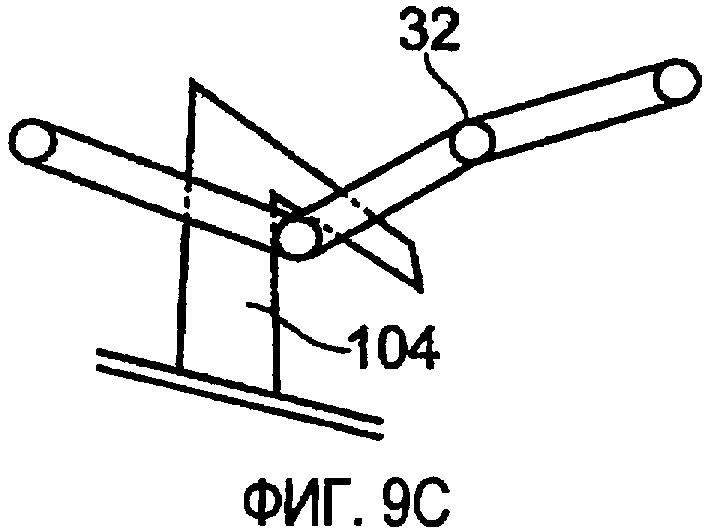
фиг.9A, 9B и 9C схематически изображают альтернативные зацепляемые элементы согласно вариантам исполнения изобретения; и
фиг.10 схематически изображает зацепляемый элемент, содержащий флотационное устройство согласно варианту исполнения изобретения.
Подробное описание изобретения
На фиг.2 и 3 схематически показано устройство 22, 24 для возврата оборудования, размещенного под водой, согласно варианту исполнения изобретения. В этом варианте оборудование представляет собой модуль в виде электромагнитного приемника 26, лежащего на дне 4 моря. Приемник 26 подобен приемнику, показанному на фиг.1, и его следует воспринимать как электромагнитный приемник 2. Это означает, что приемник 26 имеет обычный механизм для его подъема, снабженный флотационным устройством 16, балластным грузом 8 и высвобождающим соединителем 10, как это описано выше. Таким образом, устройство 22, 24 предназначено для возврата приемника в случае, когда при использовании обычного механизма возврата произошел сбой. Следует принять во внимание, что в других примерах приемник (или другое оборудование) может не содержать обычный механизм возврата, и устройство 22, 24 является основным средством для возврата оборудования. Принцип операции по возврату в обоих этих случаях одинаков.
Устройство содержит две части: первая часть, показанная на фиг.2, представляет собой зацепляемый элемент 22, названный в этом варианте исполнения «гарпуном». Гарпун 22 прикреплен к приемнику с использованием фиксаторов 28. Прикрепление выполняют до погружения приемника. Может быть использована любая обычная форма фиксирования, например гарпун 22 может быть приварен или прикреплен болтами к фланцу или кронштейну приемника 26. Гарпун 22, в общем, имеет плоскую форму и выполнен на конце, отдаленном от конца, прикрепленного к приемнику, в виде наконечника стрелы. Гарпун 22 (и фиксаторы 28) таковы, что могут выдержать вес приемника 26. Кроме того, если предполагают возникновение значительных динамических усилий во время подъема (например, из-за течений или качки надводного судна) или если приемник размещен в районе с илистым дном, в результате чего могут возникать засасывающие усилия при его подъеме со дна моря, гарпун 22 и фиксаторы 28 должны выдерживать эти дополнительные нагрузки. Гарпун располагают таким образом, чтобы при обычном опускании приемника на дно моря головка стрелы была направлена вверх и выступала на высоту выше смежных частей приемника 26.
Вторая часть аппарата показана на фиг.3 и содержит раму 30, несущую сетку 32 и поддерживаемую тросом 34 (например, цепным бриделем), прикрепленным к раме. Соединенные вместе части устройства: рама 30, сетка 32 и поддерживающий трос 34 в сборе называют в данном варианте исполнения «ловильным устройством» 24. Ловильное устройство 24 можно поднимать и опускать в воду, используя подъемный механизм (не показан на фиг.3) таким образом, чтобы рама 30 и сетка 32 оставались, по существу, расположенными горизонтально. Подъемный механизм обычно содержит лебедку и стрелу/кран, расположенные на надводном судне, на которое надлежит поднимать приемник.
Рама 30 в этом варианте имеет, в общем, квадратную форму. Она имеет прочную конструкцию, например выполнена из стальной трубы или сплошного бруса, где точки ее подъема расположены по углам. Рама 30 должна нести вес оборудования, которое подлежит возврату (и выдерживать любые ожидаемые дополнительные нагрузки, упомянутые выше). Предпочтительно придавать такую форму раме, чтобы можно было в большей степени снизить сопротивление рамы при ее перемещении в толще воды. Рама может быть предварительно изготовлена или может быть выполнена из секций, которые можно собирать вместе, когда это требуется, для уменьшения занимаемого ею пространства при хранении, когда ее не используют.
Сетка 32 в данном варианте содержит сетное полотно, образованное из полипропиленового каната, натянутого между сторонами рамы 30. Другими материалами для сетного полотна могут также служить, например, высокопрочный синтетический канат или стальной канат. Сетное полотно должно обладать способностью нести вес оборудования, подлежащего возврату (и выдерживать любые дополнительные нагрузки, которые, вероятно, могут возникнуть). Хотя на фиг.3 показана сетка в туго натянутом состоянии, нет особой необходимости в том, чтобы сетка была натянута до какой-либо конкретной степени натянутости.
Во время подъема оборудования, как пояснено дополнительно ниже, происходит взаимное зацепление гарпуна и сетки и таким образом обеспечивается возможность подъема оборудования, подлежащего возврату, со дна водного пространства. Таким образом, размеры ячеек сетки и размер зацепляемой части гарпуна (т.е. головка стрелы в данном варианте исполнения) выбирают таким образом, чтобы зацепляемые части могли легко проходить через сетку при ее опускании (т.е. при опускании ловильного устройства вниз на гарпун), но с большой степенью вероятности захвата (т.е. взаимного сопряжения) сеткой при последующем подъеме ловильного устройства вверх от дна моря, чтобы таким образом обеспечить возможность подъема приемника со дна моря. Это может быть достигнуто, например, если ширина головки стрелы между концами ее зубцов (т.е. наибольший размер), грубо говоря, соответствует характерному размеру ячеек сетки, например, если сетка содержит квадратные ячейки, то длине стороны или диагонали ячеек. При типичном применении головка стрелы и ячейки сетки имеют характерный размер около 50 см или, например, около того. Большие размеры, например 1 метр или 2 метра, или даже еще большие можно использовать для подъема большого или особенно тяжелого оборудования. Аналогичным образом меньшие размеры можно использовать при других обстоятельствах.
Типичный общий размер рамы 30 также зависит от применения по месту. Для подъема приемников, используемых при типичных электромагнитных исследованиях, рама может иметь длину стороны, составляющую, например, 5 метров или около того. Однако можно использовать рамы больших или меньших размеров. В общем, как показано дополнительно ниже, использование рам больших размеров позволяет производить более быстрый возврат оборудования, особенно если его точное расположение не известно. С другой стороны, рамы меньших размеров легче хранить, использовать и забрасывать за борт при использовании. Таким образом, на больших судах, ведущих поиск оборудования, которое может быть размещено в любом месте на больших площадях, предпочтительно использовать большие рамы, например, со стороной длиной 10 метров или больше. В то же время рамы меньших размеров, например со стороной длиной 2 метра или около того, можно использовать на малых судах, ведущих поиск возвращаемого оборудования, расположение которого известно более точно. Точность, с которой ловильное устройство может быть направлено ко дну моря, что, вероятно, зависит от глубины столба воды, также играет роль в определении наиболее соответствующего размера. Например, в случаях, когда сложно позиционировать ловильное устройство, например, при сильных течениях или при больших глубинах, рамы больших размеров могут быть предпочтительнее.
На фиг.4 схематически показано судно 40, с которого ведут поиск, для возврата электромагнитного приемника 26, где используют гарпун 22 и ловильное устройство 24, показанные на фиг.2 и 3, согласно варианту исполнения изобретения. Судно ходит по поверхности водного пространства 52, где был размещен приемник 26. Судно 40 может быть судном, производящим электромагнитные исследования, или может быть специальным судном для возврата оборудования, например, в случае, когда гарпун 22 и ловильное устройство 24 не являются основным средством возврата и, таким образом, его обычно не транспортируют на судне, выполняющем исследования.
В данном варианте принято, что положение приемника 26 на дне 4 моря (схематически указано стрелкой P на фиг.4) не известно. Таким образом, судно 40 должно провести поиск приемника 26, прежде чем будет обеспечена возможность его возврата. Для поиска и возврата приемника 26 судно располагают в начальной позиции, соответствующей наилучшей первичной гипотезе или случайной гипотезе, если нет предпочтительной отправной точки (схематически указана стрелкой Q), и ловильное устройство 24 опускают с борта судна, используя расположенный на борту подъемный механизм 42. Подъемный механизм содержит стрелу 44 крана и лебедку 46, присоединенную к подъемному канату 48. Подъемный механизм дополнительно содержит обычный датчик нагрузки (не показан), вводимый в действие для определения нагрузки, прикладываемой к подъемному механизму (т.е. для определения натяжения подъемного каната). Подъемные механизмы данного типа обычно используют на судах, особенно на судах для исследований, и, вероятно, любой существующий подъемный механизм на судне можно использовать в вариантах исполнения изобретения. Габарит подъемного механизма 42, т.е. его подъемная способность, длина подъемного каната и форма стрелы 44, которая должна соответствовать требованиям, предъявляемым к данному варианту исполнения изобретения, зависит, например, от размера рамы, размера и веса оборудования, подлежащего подъему, и глубины воды. Несущий канат 34 прикреплен к подъемному канату 48 с использованием соединителя 50 таким образом, чтобы ловильное устройство 24 можно было поднимать и опускать в воду, используя подъемный механизм согласно обычным технологиям. Хотя показаны отдельно подъемный канат 48 и несущий канат 34, следует понимать, что можно использовать также единый канат.
Как только ловильное устройство 24 выводят за борт, подъемный механизм 42 используют для опускания ловильного устройства на дно моря, как схематически показано на фиг.4 стрелкой D. Когда ловильное устройство достигает большой глубины, датчик нагрузки показывает увеличивающуюся нагрузку L, связанную с весом ловильного устройства 24 в воде плюс равномерно увеличивающийся компонент, связанный с увеличивающимся весом подъемного каната по мере его разматывания (принимая, что ловильное устройство не находится в свободном падении). Наиболее полезной нагрузкой, подлежащей мониторингу, является статическая нагрузка, т.е. нагрузка, которую наблюдают, когда раму опускают или поднимают с постоянной скоростью, или когда имеет место пауза при подъеме или опускании. Однако астатическая нагрузка, т.е. нагрузка, которую наблюдают, когда имеет место некоторое ускорение ловильного устройства, может также быть использована, если принимают в расчет соответствующее ускорение.
Неожиданное падение значения указанной нагрузки происходит при достижении рамой 30 морского дна и ее вес больше не поддерживают подъемным механизмом. Нагрузка непосредственно перед этим соответствует весу ловильного устройства и весу длины подъемного каната, соответствующей глубине воды (опять-таки принимая, что ловильное устройство не находится в состоянии свободного падения). Скорость, с которой ловильное устройство опускают в толщу воды 52, зависит от скорости, с которой, используя лебедку 46 подъемного механизма 42, можно разматывать подъемный канат 48, и от всевозможных факторов, связанных с повреждением оборудования на дне моря или повреждением самого дна моря. Например, вблизи чувствительных установок скорость опускания может быть уменьшена для минимизации риска повреждения, вызванного ловильным устройством 24, падающим на дно моря. Медленным приближением ловильного устройства ко дну моря (по меньшей мере, на близком расстоянии от дна моря) также способствуют предотвращению повреждения оборудования, подлежащего возврату, в случае соударения с ним рамы 30 ловильного устройства.
Как только определено, что ловильное устройство 24 находится на дне моря, разматывание подъемного каната подъемного механизма прекращают, и подъемный механизм переключают на подъем ловильного устройства на высоту, при которой сетка 32 (принимая в расчет любой ее провис) будет дальше от дна моря, чем верх зацепляемого гарпуна 22, прикрепленного к оборудованию, подлежащему возврату, обозначенную на фиг.4 как высота h.
Если статическая нагрузка в подъемном механизме определена как равная той, которая была при подъеме со дна моря, и как равная той, которая была на соответствующей высоте при опускании на дно моря, то это означает, что ловильное устройство ничего не «захватило» и, следовательно, оборудование, подлежащее возврату, не найдено. (Различия значений астатической нагрузки можно также сравнивать путем проведения соответствующих расчетов по определению влияния различий в ускорении ловильного устройства при опускании и подъеме).
Таким образом, судно перемещают в другое место и предпринимают следующую попытку. Судно можно перемещать хаотически из одного места обследования в другое, но, в общем, более эффективно следовать по систематическому плану поиска.
На фиг.5 схематически показан вид в плане поверхности дна 4 моря, показанного на фиг.4. Ловильное устройство 24 находится в положении Q, а приемник 26, подлежащий возврату, показан в положении P. Пунктирные линии использованы на фиг.5 для указания координатной сетки поиска, на которой показан ряд квадратов поиска. Квадрат поиска обследуют путем позиционирования ловильного устройства 24 над этим квадратом и опускания и подъема его со дна моря, как это описано выше со ссылкой на фиг.4. Если квадрат обследован без достижения успеха (т.е. ловильное устройство опущено и поднято со дна моря без заметного изменения измеренной нагрузки), то ловильное устройство перемещают в другой квадрат.Таким образом обследуют всю площадь, квадрат за квадратом. Порядок, в котором обследуют квадраты, может соответствовать любой известной методике поиска. Например, может быть использовано перемещение по увеличивающейся спирали вокруг исходного квадрата (содержащего квадрат Q). Однако может также быть целесообразным принятие в расчет маневренности судна и возможных различий в степени погрешности в различных направлениях. Например, может быть более целесообразным выполнение растрового поиска вдоль полос скорее, чем поиска по спирали.
Размер квадратов поиска зависит от размера рамы 30 и точности, с которой ее можно располагать на дне моря. Например, если раму можно очень точно позиционировать, то могут быть приемлемыми квадраты поиска, которые только немного меньше размера рамы. Однако в других случаях более приемлемы квадраты поиска меньшего размера, например квадраты, имеющие характерный размер, составляющий половину характерного размера рамы. Это может способствовать тому, что не будут пропущены участки дна моря между последующими операциями подъема и опускания. В этом случае следует принять, что поиск проводят по спирали, а квадраты поиска только немного меньше размера рамы, например составляют 90% размера рамы.
По окончании процедуры, описанной выше со ссылкой на фиг.4, по обследованию квадрата поиска, содержащего точку Q, ловильное устройство располагают на высоте над дном моря, превышающей высоту h гарпуна 22. Поддерживая эту высоту, с судна 40 располагают ловильное устройство над следующим квадратом поиска, где этот квадрат обозначен на фиг.5 как квадрат SI. Поддерживая ловильное устройство на высоте, превышающей высоту гарпуна, уменьшают риск соударения ловильного устройства 24 с оборудованием, подлежащим возврату, при переносе ловильного устройства. Если дно моря неровное или другое оборудование размещено на дне моря, то может быть предпочтительным подъем ловильного устройства 24 на большую высоту во время его перемещения между квадратами поиска. Однако, в общем, желательно как можно меньше изменять высоту подъема ловильного устройства во время поиска для увеличения скорости поиска.
Как только ловильное устройство располагают над квадратом поиска SI, его опускают и поднимают со дна 4 моря, как это описано выше. По нагрузке в подъемном механизме при подъеме ловильного устройства со дна моря опять-таки определяют, что оно ничего не «захватило». Затем с судна располагают ловильное устройство над квадратом поиска S2 и продолжают поиск, и так проходят квадраты поиска S3-S10, как это показано на фиг.5.
В конце концов, следуя по вышеописанному алгоритму поиска, ловильное устройство 24 располагают над квадратом поиска, содержащим оборудование 26, подлежащее возврату, т.е. над квадратом поиска S11, содержащим точку P.
Фиг.6 подобна фиг.4 и ее следует понимать как и фиг.4. Однако на фиг.6 поиск ведут уже в квадрате поиска S11, где ловильное устройство теперь расположено над приемником 26 и находится в процессе опускания на него, как показано стрелкой D. При приближении ловильного устройства ко дну моря оно располагается на приемник 26. Если сетка 34 провисает, то рама 32 может располагаться на дно 4 моря вокруг приемника, и при этом сетка укладывается складками поверх его. Если, с другой стороны, сетка не достаточно провисает, то рама может поддерживаться в некоторой степени (посредством сетки) приемником. Если оборудование, подлежащее возврату, считается чувствительным к повреждению, то провисающая сетка может быть предпочтительной для уменьшения вероятности того, что оборудование должно будет выдерживать вес рамы, если это важно.
В любом случае при опускании ловильного устройства на приемник гарпун 22 проходит через ячейку сетки 32. Когда вес ловильного устройства уже не действует на подъемный канат, датчик нагрузки указывает на уменьшение нагрузки, действующей на подъемный механизм, на подъемном механизме прекращают разматывание подъемного каната и начинают подъем ловильного устройства со дна моря, как это описано выше. Однако когда это случается, стреловидная головка гарпуна 22 зацепляется за сетное полотно сетки 32. Таким образом, когда ловильное устройство 24 поднимают со дна 4 моря, приемник взаимно зацепляется с ним и его также поднимают. Когда ловильное устройство и приемник отрывают от дна моря, посредством датчика нагрузки определяют, что нагрузка, действующая на подъемный механизм, больше той, которая была при его опускании, из-за дополнительного веса приемника. Таким образом, оператор на судне (или соответствующим образом выполненный контроллер, если процесс возврата оборудования автоматизирован) узнает, что гарпун 22 сопрягся с сеткой 32 и поэтому можно окончить алгоритм поиска, а ловильное устройство может быть поднято на поверхность воды вместе с приемником 22.
Фиг.8 подобна фиг.7 и ее следует понимать как и фиг.7. Однако на фиг.8 показана ситуация после взаимного зацепления гарпуна 22 и сетки 32, и ловильное устройство 24 и прикрепленный к нему приемник 26 поднимают на поверхность воды, как это показано стрелкой U.
На фиг.7 схематически показано взаимное зацепление гарпуна 22 с сеткой 32 во время возврата приемника 22 из водного пространства 52. На фиг.7 показан приемник после его вытаскивания из воды и он готов к перемещению на палубу судна для завершения процесса возврата. Приемник 26 может быть расположен на палубе судна путем выполнения соответствующих маневров ловильным устройством или может быть отделен от ловильного устройства во время удержания его на поверхности воды, например, с использованием отдельного баркаса.
Следует понимать, что тогда как выше описан процесс возврата приемника, предназначенного для размещения на дне моря и содержащего обычный основной механизм возврата (т.е. дистанционно отделяемый балластный груз), который не сработал, в других случаях механизм возврата согласно вариантам исполнения изобретения является основным средством возврата оборудования, предназначенного для размещения на дне моря. Кроме того, так как подходящий зацепляемый элемент может быть легко и дешево прикреплен к любому оборудованию для подводного использования, предназначено или не предназначено оно к тому, чтобы его высвобождали на дне моря, может быть предпочтительным обеспечение оборудования зацепляемым элементом, чтобы его можно было возвращать так, как это описано выше, в случае, если его непреднамеренно сбросили или оно каким-то иным способом оказалось осевшим на дне моря.
В некоторых вариантах исполнения зацепляемый элемент может быть снабжен обычным передатчиком местоположения (например, акустическим передатчиком) для способствования определению местоположения оборудования, подлежащего возврату, с использованием подходящих инструментов для слежения на судне и для уменьшения таким образом времени поиска. Это может быть особенно полезным, если зацепляемый элемент надлежит прикрепить к оборудованию, которое обычно не предназначено для размещения на дне моря, как средство для страхования от случайной утери, так как маловероятно, чтобы такое оборудование было снабжено собственным передатчиком местоположения.
Кроме того, ловильное устройство может быть также снабжено передатчиком местоположения для обеспечения возможности определения его расположения. Это может способствовать по возможности более надежному поиску. Например, если зацепляемый элемент (или оборудование, к которому он прикреплен) и ловильное устройство снабжены передатчиком местоположения, то расположение каждого из этих объектов (и, следовательно, расположение их друг относительно друга) может быть определено, чтобы ловильное устройство можно было направлять к оборудованию, подлежащему возврату, на основании определения их положений.
Информация, касающаяся высоты рамы над дном моря, например, получаемая от обычного эхолота или другого датчика глубины, может быть также использована для обеспечения возможности опускания ловильного устройства в морскую воду с возможно большей скоростью, но с замедлением при приближении ко дну для уменьшения риска повреждения.
На фиг.9A-9C схематически показаны альтернативные варианты конструкции зацепляемого конца зацепляемого элемента и части сетки согласно другим вариантам исполнения изобретения.
На фиг.9А зацепляемый элемент 92 содержит центральную опору 94, которую прикрепляют к оборудованию до размещения оборудования на дне моря, на одном конце (не показан), и пару зубцов, прикрепленных с возможностью поворота к верхнему концу центральной опоры. Верхний колпак 97 прикреплен к центральной опоре для предотвращения поворота зубцов за пределы ограниченного угла от центральной опоры, например за пределы угла в 45° или около того. С помощью пары пружин 98 понуждают зубцы 96 к раскрытию в этих пределах. Пружины схематически показаны на фиг.9A в виде винтовых пружин, установленных между центральной опорой и соответствующими зубцами. Однако на практике пружины должны быть расположены так, чтобы оставалось свободное пространство под зубцами. Например, могут быть использованы пружины, установленные с возможностью поворота. Преимущество такого механизма заключается в том, что сопрягаемый элемент может деформироваться при проходе через ячейки сетки и поэтому можно использовать жесткую сетку. Это может быть предпочтительным при необходимости подъема тяжелых объектов, подлежащих возврату.
На фиг.9B и 9C стреловидная головка, описанная выше, заменена одним крюком (фиг.9B) и одним зубцом (фиг.9C). Следует понимать, что можно использовать множество других конструкций, например зацепляемый элемент может быть не ограничен, в общем, плоской формой, и можно использовать конструкции, основанные на использовании зубцов, крюков, сцепок и т.д., проходящих в нескольких направлениях, при наличии которых обеспечивается возможность легкого прохода зацепляемого элемента через сетку, опущенную на него, но которые сцепляются с сеткой при ее подъеме вверх. В общем, наиболее соответствующая конструкция зацепляемого элемента может также зависеть от особенностей конструкции оборудования, подлежащего возврату, например, от его веса в воде, веса в воздухе, формы и уравновешенности, чувствительности к дополнительно прикрепляемым элементам и т.д.
На фиг.10 схематически показан зацепляемый элемент, который может быть использован в случаях, когда невозможно точно знать, как будет сориентировано оборудование, подлежащее возврату, на дне моря. В этом варианте принято, что оборудование имеет форму кубовидного ящика 110, который был непреднамеренно сброшен на дно 4 моря. Зацепляемый элемент 112 содержит стреловидную головку 114, стержень 116, флотационное устройство 122 и гибкое соединение 118 (например, канат или цепь). Гибкое соединение 118 прикреплено к оборудованию 110 до его непреднамеренного падения в воду (т.е. оно может быть прикреплено до того, как оборудование 110 попадает в воду, или на более поздней стадии, например, когда оно уже находится под водой, но близко к состоянию, когда оно начнет перемещаться, и таким образом возможен риск его опускания на дно). Если оборудование 110 сброшено на дно моря, то благодаря гибкому соединению и флотационному устройству стреловидная головка зацепляемого элемента будет направлена вверх. Это оборудование может быть возвращено так же, как описано выше, путем опускания сетки на него. Флотационное устройство 122 может быть, например, выполнено в виде одной или нескольких камер, заполненных воздухом, в виде объемов из полистирола или другого материала, обладающего плавучестью. Так как зацепляемый элемент 112 не установлен жестко, имеет место большая вероятность того, что он не пройдет через сетку, а будет просто прижат ею ко дну. В случаях, подобных этому, когда считается, что имеется реальная вероятность того, что гарпун и сетка не зацепятся друг с другом, может быть произведено множество последовательных подъемов и опусканий ловильного устройства в каждом квадрате поиска, чтобы способствовать исключению утери оборудования.
При большой глубине общий вес ловильного устройства и подъемного каната, требующегося для достижения дна моря, может быть таким, что сложно надежно определить наличие дополнительного веса оборудования (например, из-за подводных течений или качки судна происходят колебания нагрузки, которые могут быть значительно больше веса оборудования). В случаях, подобных этому, может быть предпочтительным размещение датчика нагрузки не на надводном судне, а ближе к ловильному устройству (с соответствующим каналом связи с поверхностью), чтобы вес каната, находящегося выше датчика нагрузки, не влиял на измерения. Аналогично этому в случаях, когда требуется особенно высокая чувствительность, может быть предпочтительным размещение датчика нагрузки в самой сетке. Путем установки тензодатчика (или множества тензодатчиков) в полотно сетки можно определять значительное изменение измеряемой нагрузки даже при относительно небольшом весе оборудовании в том случае, если вес оборудования соизмерим с весом сетки, поддерживаемой через посредство тензодатчика (или датчика нагрузки другого типа).
Таким образом, описаны устройство и способ возврата оборудования из водного пространства. Устройство содержит раму, несущую сетку и зацепляемый элемент. Зацепляемый элемент способен зацепляться с сеткой и его прикрепляют к оборудованию, подлежащему возврату, до размещения оборудования на дне моря. После размещения оборудования его возврат может быть осуществлен путем опускания сетки, поддерживаемой рамой, на оборудование для взаимного зацепления зацепляемого элемента и сетки. Раму и сетку можно затем поднять на поверхность воды вместе с оборудованием. Процесс возврата может включать поиск оборудования путем мониторинга нагрузки, действующей на раму и сетку при их опускании и подъеме в различных местах, при этом соответствующее увеличение нагрузки воспринимают как указание на то, что оборудование захвачено сеткой. Таким образом, согласно вариантам исполнения изобретения созданы простой, дешевый и надежный способ возврата подводного оборудования, размещенного под водой, и устройство для его осуществления. Применение вариантов исполнения изобретения обеспечивает достижение следующих преимуществ.
Аппарат прост по конструкции и его легко использовать; для его изготовления не требуются специальные материалы или высокая точность; при его использовании наносятся минимальные повреждения дну моря.
Любое подводное оборудование может быть легко и с небольшими материальными затратами снабжено зацепляемым элементом, при наличии которого обеспечивается возможность возврата оборудования с использованием сетки, поддерживаемой на раме, в любое время в будущем с затратой только части средств, необходимых при использовании традиционных способов возврата (с использованием водолазов или дистанционно управляемых транспортных средств).
Размер рамы можно варьировать в зависимости от площади, на которой надлежит вести поиск, и не существует ограничений по глубине моря, которые имеют место при использовании дистанционно управляемых транспортных средств или водолазов.
Благодаря размеру рамы большие площади могут быть обследованы значительно быстрее и эффективнее, чем при применении традиционных способов траления с использованием кошек.
В районах, в которых ведут борьбу с загрязнением окружающей среды, можно извлекать инструмент/якорные средства, ничего не оставляя на дне моря, в противоположность стандартным акустическим способам размещения/возврата, при применении которых оставляют балластный груз на дне моря после возврата.
Таким образом, устройство можно использовать для легкого возврата приборов или другого оборудования, которое было размещено или заякорено на дне моря на различных глубинах со специальной целью или непреднамеренно, без необходимости использования акустически активизируемых высвобождающих механизмов. Устройство экономически эффективно в изготовлении и для его размещения требуется оборудование, установленное как стандартное на большей части судов, включаемых в подводные проекты. Устройство можно легко разбирать и оно занимает минимальное пространство, когда его не используют. Если нужно, то его можно изготовить на месте согласно проекту, так как для этого не требуются специальные материалы или высокая точность изготовления. Почти любой объект, который может быть размещен на дне моря, закреплен на глубине, заякорен или непреднамеренно сброшен, независимо от размера, формы или глубины, может быть извлечен посредством использования аппарата, значительно более легким и дешевым способом, чем при использовании существующих доступных способов.
Реферат
Группа изобретений относится к способу и устройству для возврата подводного оборудования из водного пространства и устройство для его осуществления. Устройство для возврата подводного оборудования содержит раму, несущую сетку и зацепляемый элемент. При этом зацепляемый элемент выполнен с возможностью зацепления с сеткой и его прикрепления к оборудованию, подлежащему возврату, до размещения оборудования на дне моря. Возврат подводного оборудования осуществляют путем опускания сетки, поддерживаемой рамой, на оборудование для взаимного зацепления зацепляемого элемента и сетки. Раму и сетку поднимают на поверхность воды вместе с оборудованием. Процесс возврата может включать поиск оборудования путем мониторинга нагрузки, действующей на раму и сетку при их опускании и подъеме. Зацепляемый элемент может иметь конец в виде стреловидной головки, крюка или зубца. Упрощается возврат подводного оборудования. 3 н. и 14 з.п. ф-лы, 10 ил.
Формула
прикрепление зацепляемого элемента к оборудованию до размещения
оборудования на дне моря; и
последующее размещение оборудования на дне моря;
опускание сетки, поддерживаемой рамой, в водное пространство на оборудование для зацепления зацепляемого элемента и сетки; и подъем вверх рамы, сетки и оборудования, прикрепленного к сетке, для возврата оборудования.
Комментарии