Способ предотвращения заноса сельскохозяйственного орудия - RU2758118C2
Код документа: RU2758118C2
Чертежи


Описание
Предшествующий уровень техники
При эксплуатации сельскохозяйственного орудия, такого как сеялка, пневматическая сеялка, зерновая сеялка или почвообрабатывающее орудие, сельскохозяйственное орудие может самопроизвольно перемещаться из стороны в сторону во время движения сельскохозяйственного орудия по полю, вместо того чтобы двигаться прямо по отношению к направлению движения вперед. Занос орудия может быть вызван тем, что на сельскохозяйственное орудие с левой и правой сторон действуют различные силы. Желательно, чтобы сельскохозяйственное орудие перемещалось прямо по отношению к направлению движения вперед.
Краткое описание чертежей
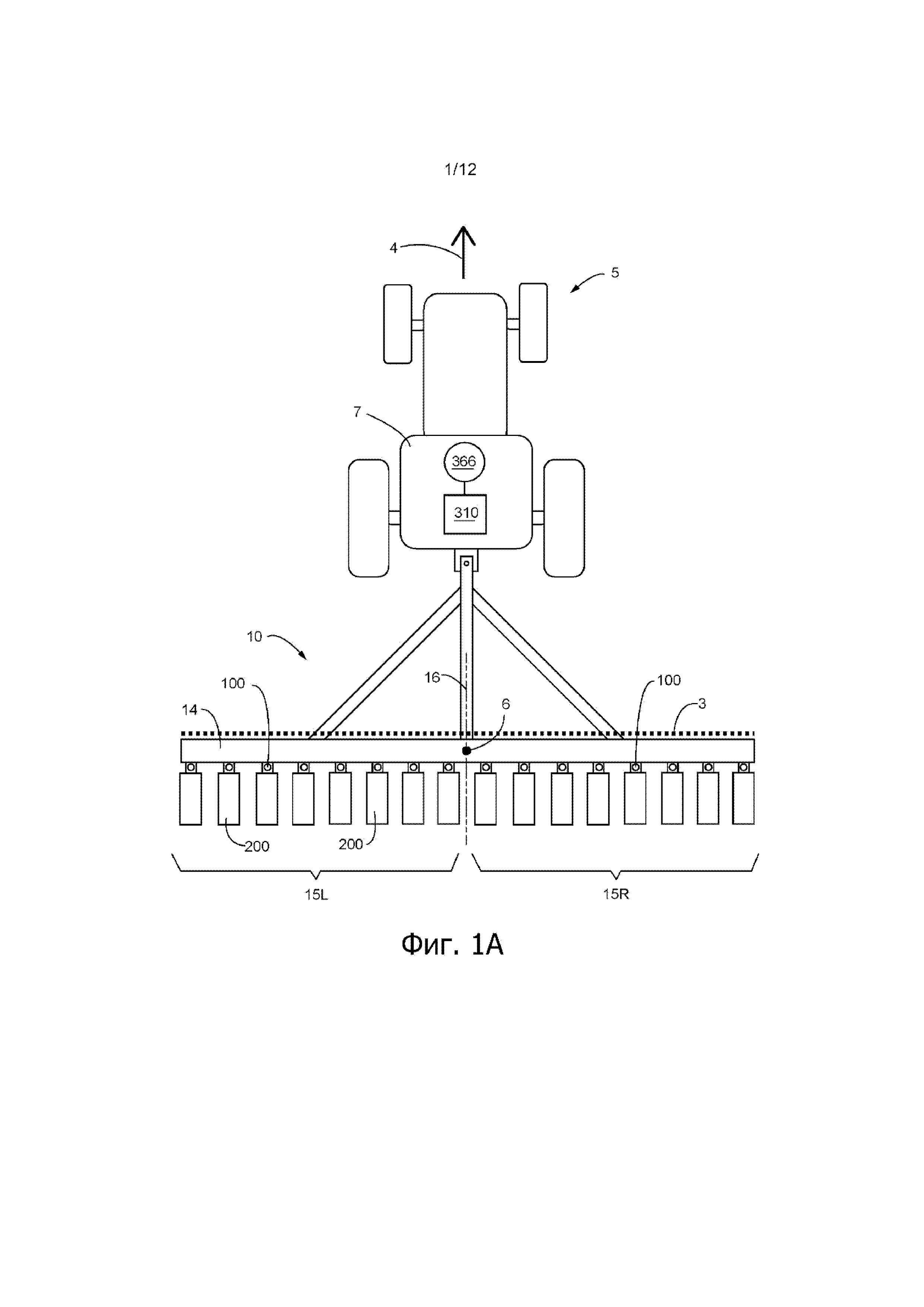
На фиг. 1А схематично представлено сельскохозяйственное орудие согласно варианту осуществления, показанное в виде рядной сеялки, буксируемой трактором, при этом каждая высевающая секция рядной сеялки имеет исполнительный механизм с переменным регулируемым прижимным усилием, вид сверху;
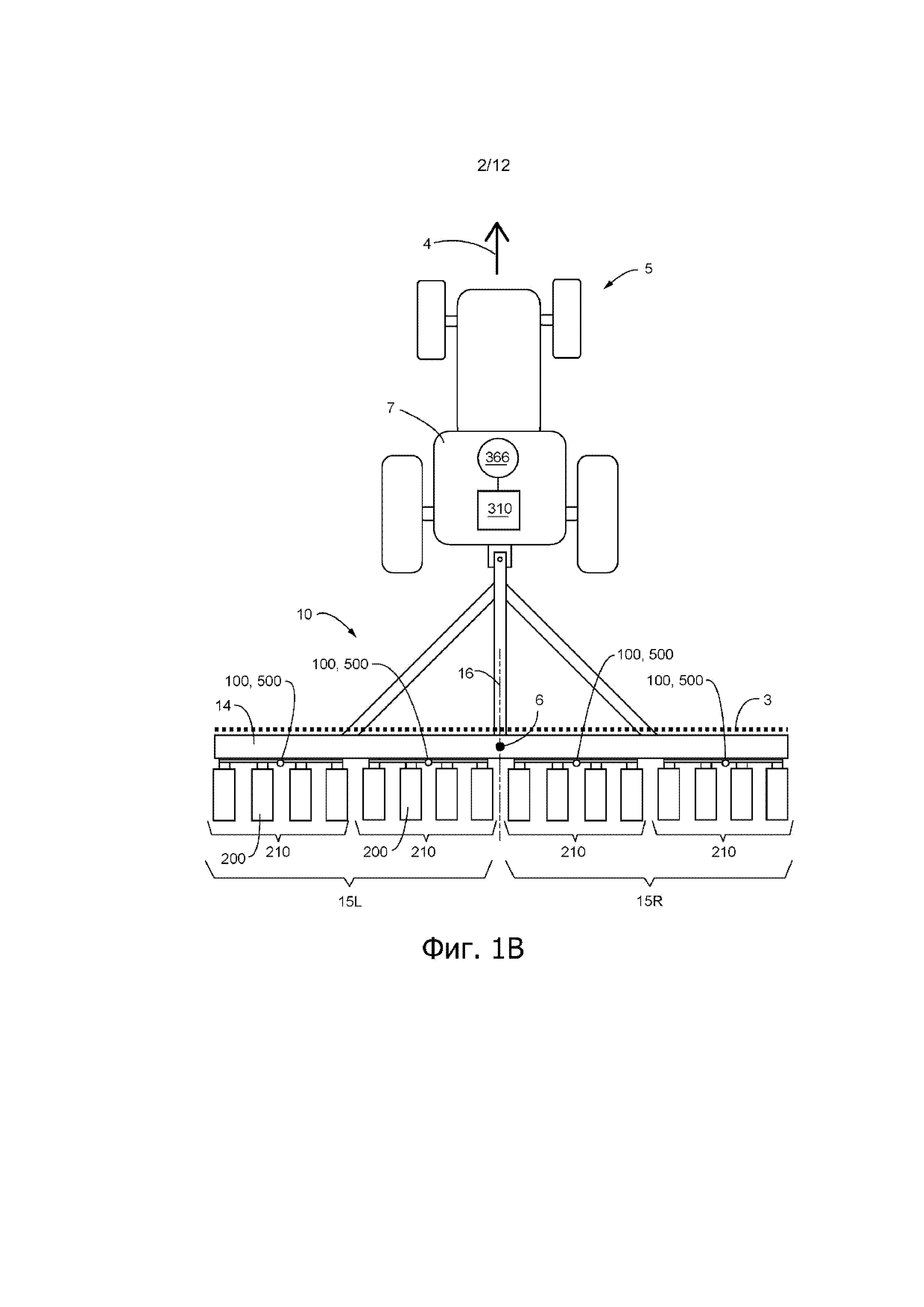
на фиг. 1B – сельскохозяйственное орудие согласно варианту осуществления, показанное в виде рядной сеялки, буксируемой трактором, при этом рядная сеялка имеет инструментальные секции с исполнительными механизмами с переменным регулируемым прижимным усилием, взаимодействующими с каждой инструментальной секцией, вид сверху;
на фиг. 2 – рядная сеялка и трактор на фиг. 1А, вид сбоку;
на фиг. 3 подробно показана высевающая секция сеялки на фиг. 1А, вид сбоку в увеличенном масштабе;
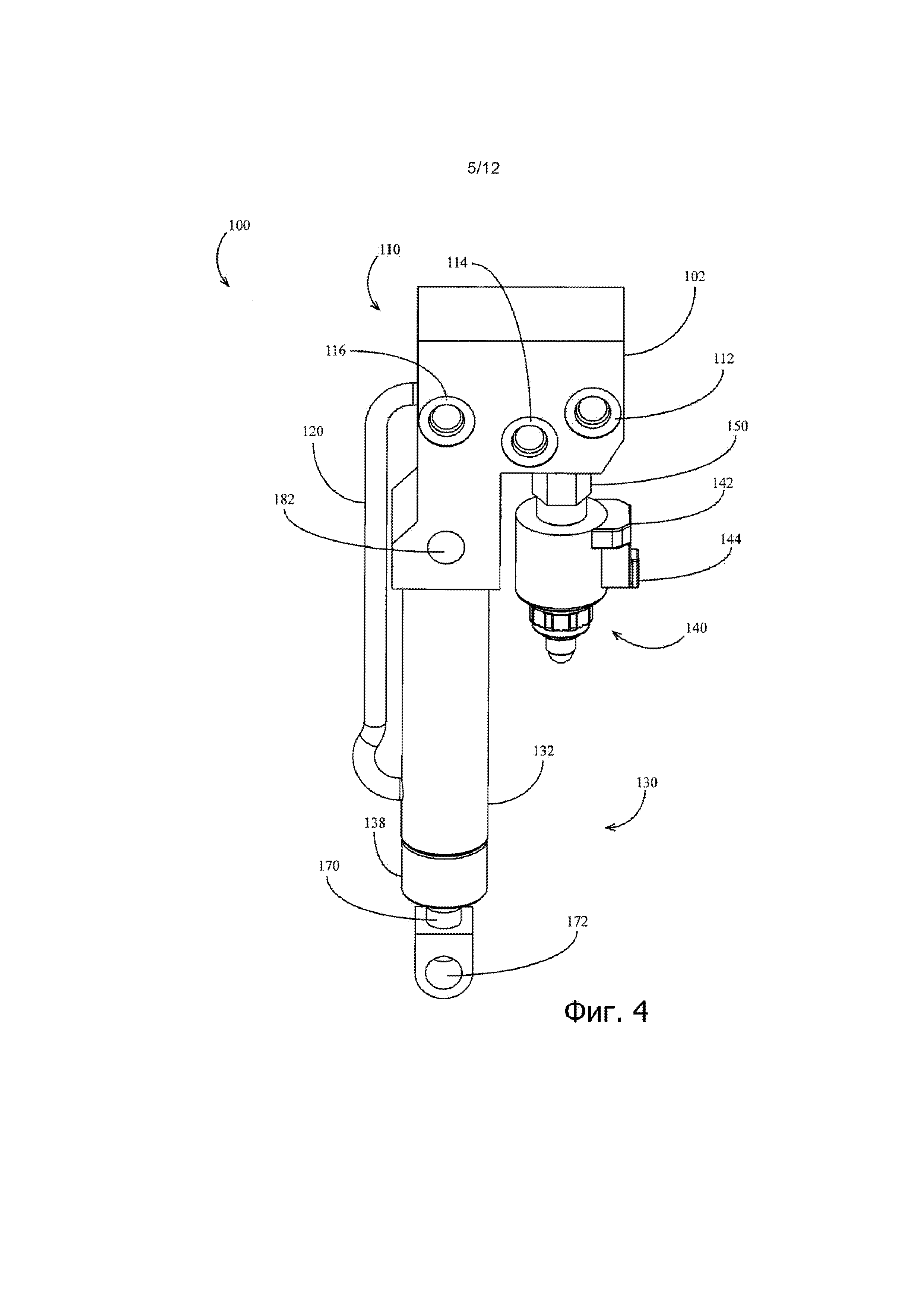
на фиг. 4 – блок управления прижимным усилием согласно варианту осуществления, вид в перспективе;
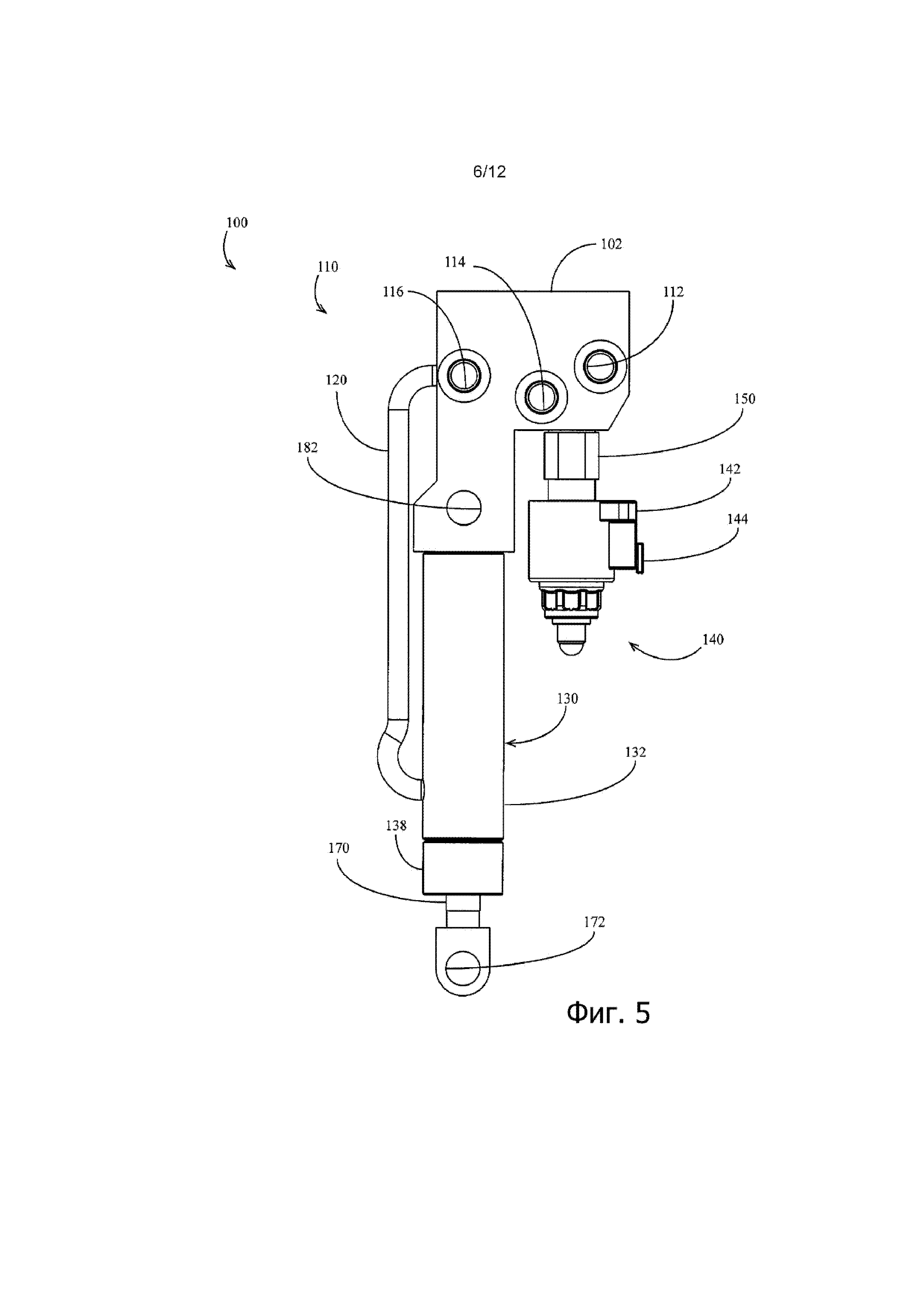
на фиг. 5 – блок управления прижимным усилием на фиг. 4 согласно варианту осуществления, вид сбоку;
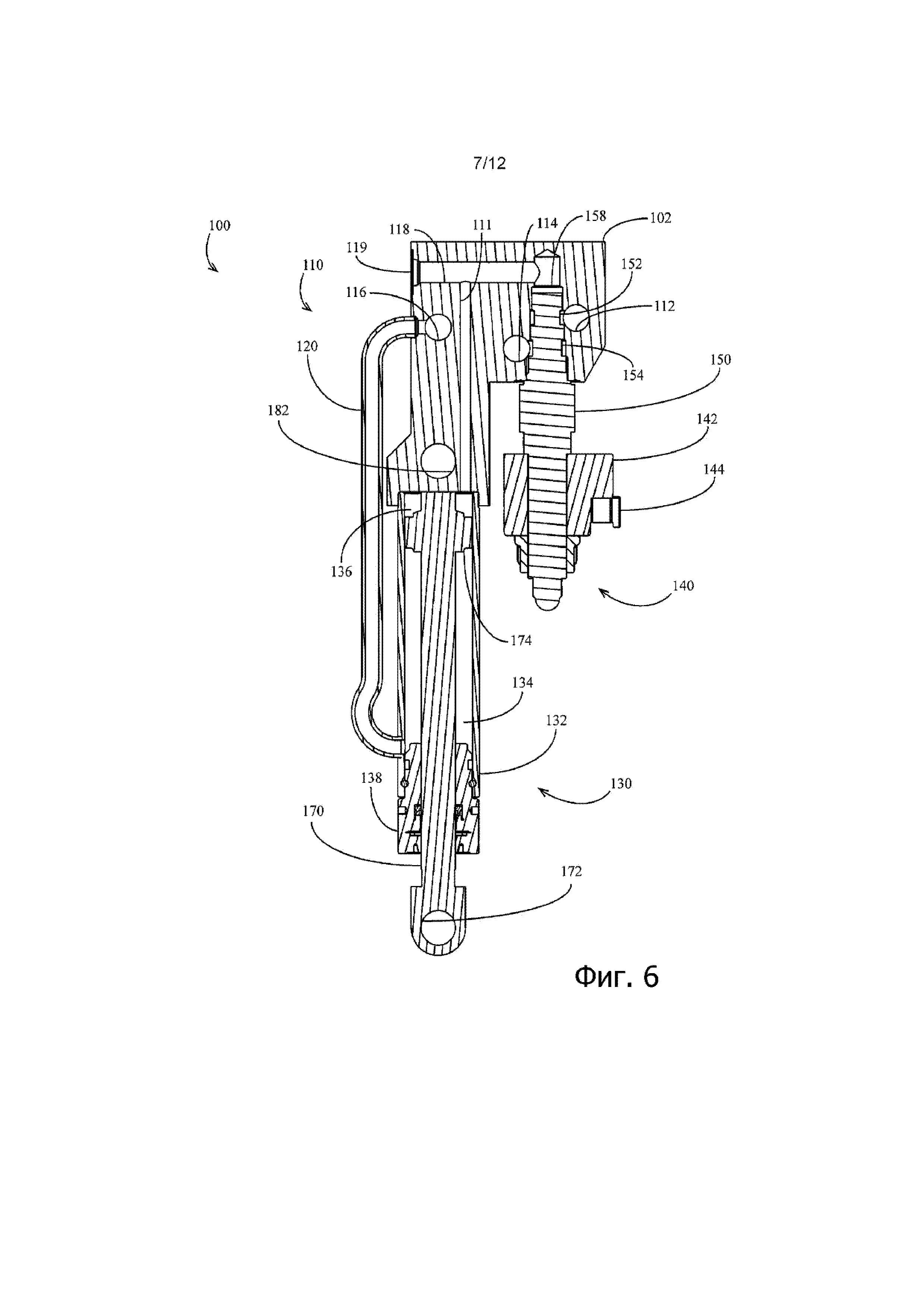
на фиг. 6 – блок управления прижимным усилием на фиг. 4, вид в разрезе;
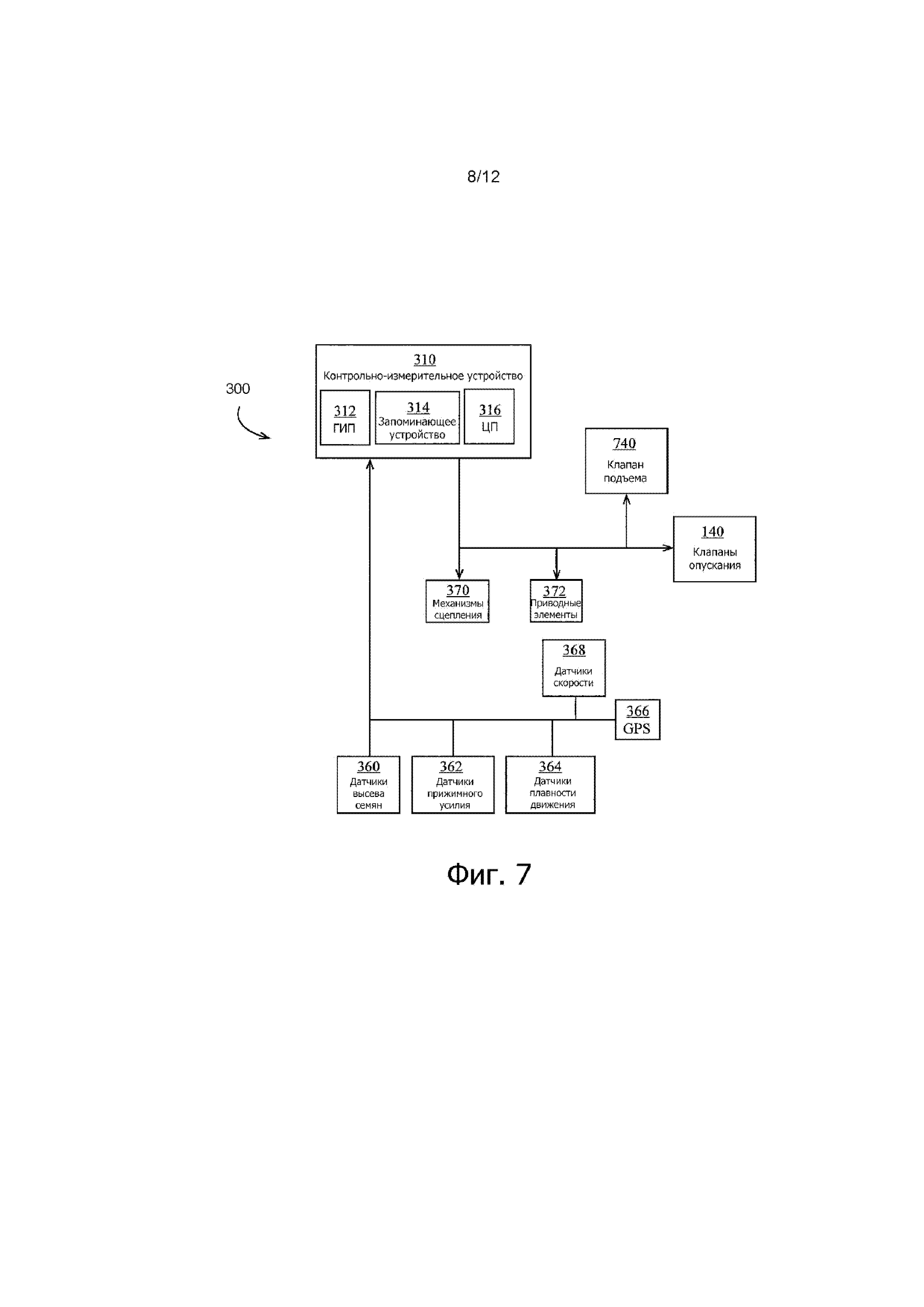
на фиг. 7 схематично показана электронная система управления для управления одним или более блоками управления прижимным усилием согласно варианту осуществления;
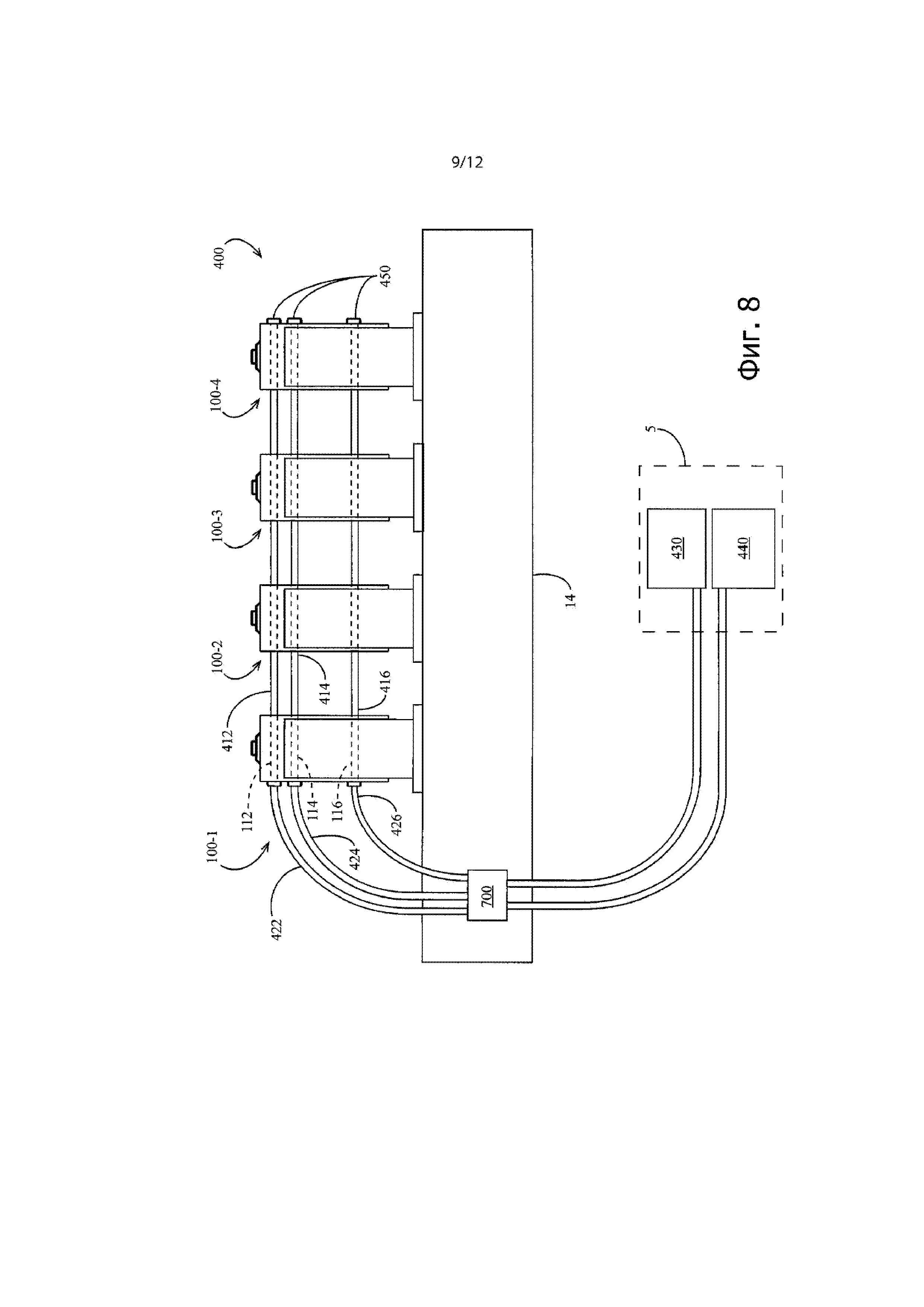
на фиг. 8 – система управления текучей средой для управления множеством блоков управления прижимным усилием согласно варианту осуществления, вид сверху;
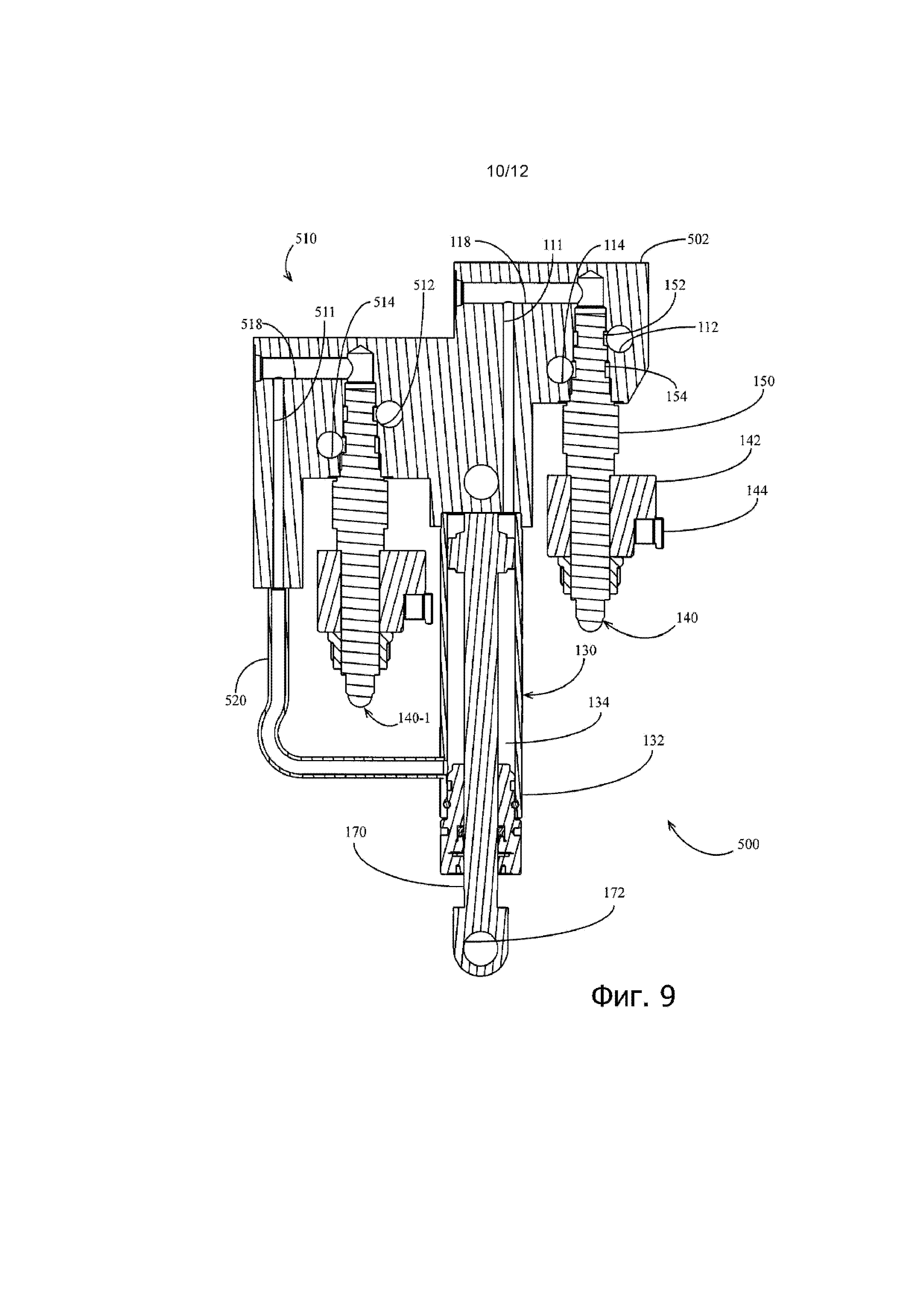
на фиг. 9 – блок управления прижимным усилием, включающий в себя клапан регулирования давления подъема, согласно другому варианту осуществления, вид в поперечном разрезе;
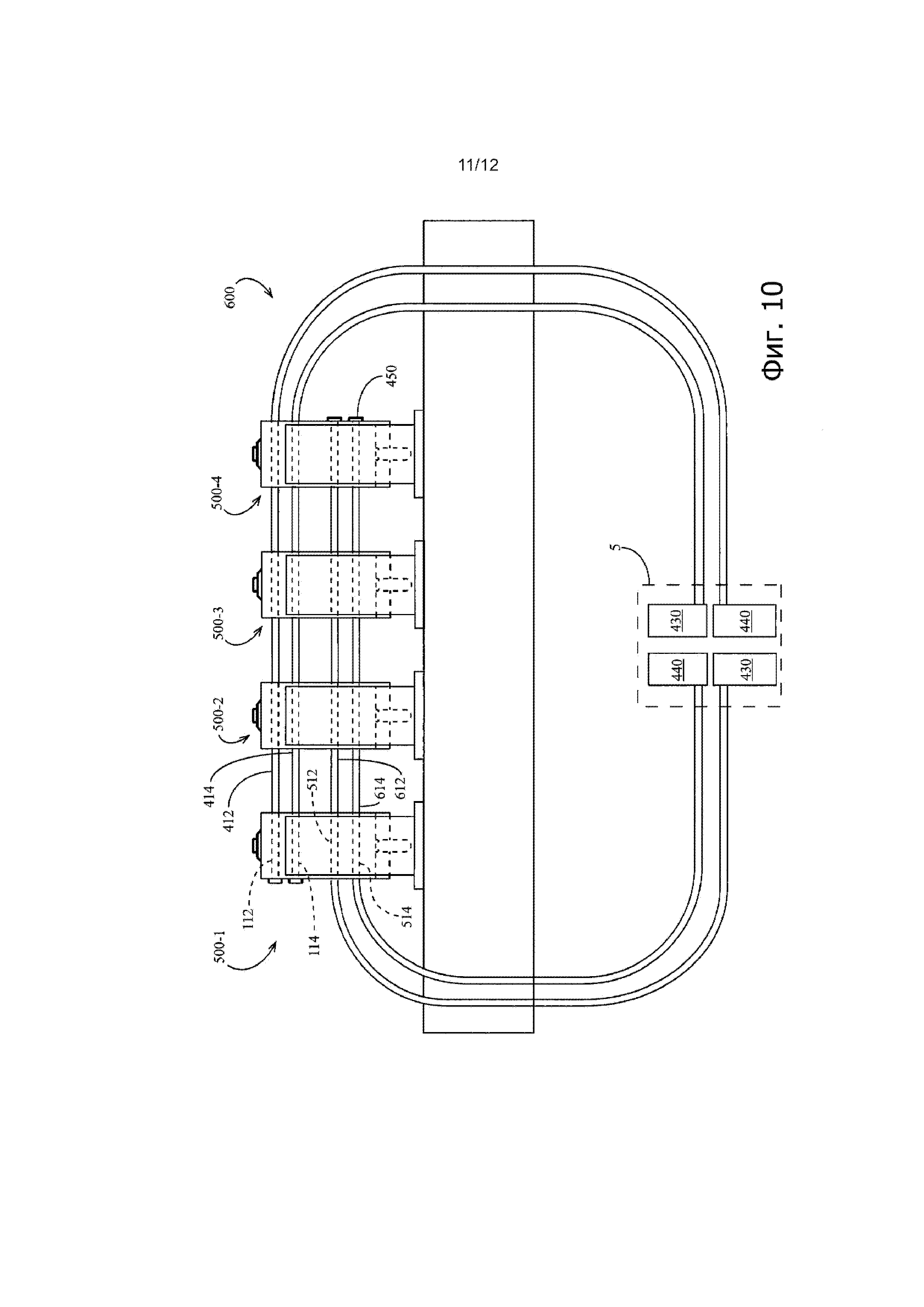
на фиг. 10 показана система управления текучей средой для управления множеством блоков управления прижимным усилием согласно другому варианту осуществления изобретения, вид сверху;
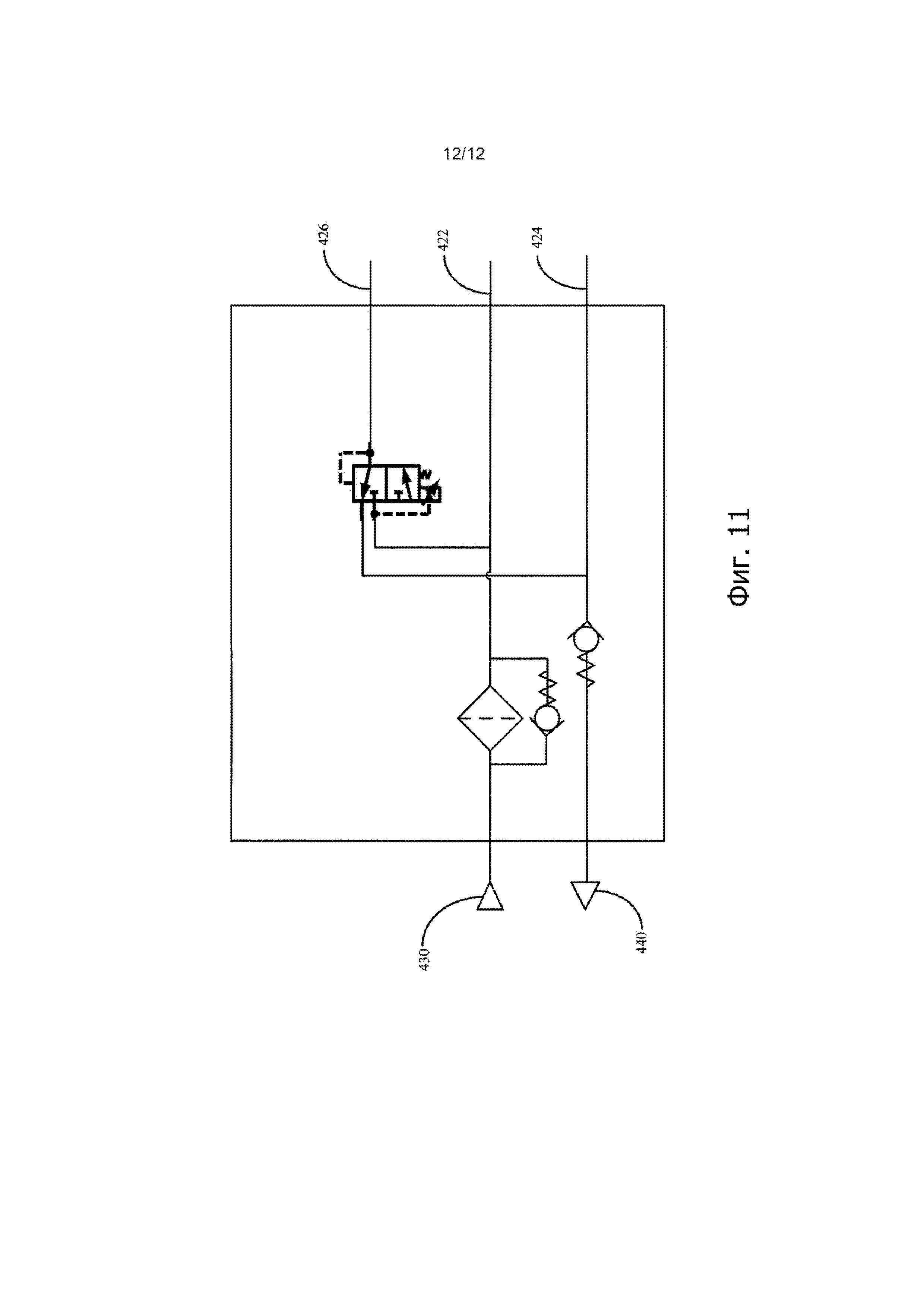
на фиг. 11 – гидравлическая схема, поясняющая коллектор для управления давлением, подаваемым на блок управления прижимным усилием, согласно варианту осуществления.
Варианты осуществления изобретения
Обращаясь теперь к чертежам, на которых одинаковые ссылочные позиции обозначают идентичные или соответствующие части на всех видах, на фиг. 1А и 1В показаны трактор 5 и сельскохозяйственное орудие 10 (например, рядная сеялка), движущиеся через поле в направлении движения вперед, как показано стрелкой 4. Сельскохозяйственное орудие 10 включает в себя навесной брус, функционально поддерживающий множество инструментов 200 (например, высевающих секций сеялки). Навесной брус 14 включает в себя правую сторону 15R и левую сторону 15L относительно центральной линии 16 или средней точки 6 навесного бруса. Вдоль навесного бруса 14 показана поперечная линия 3, проходящая перпендикулярно к направлению движения вперед.
Следует понимать, что, хотя на фиг. 1А и 1В показано сельскохозяйственное орудие 10 в виде рядной сеялки, сельскохозяйственное орудие 10 может представлять собой сельскохозяйственное орудие любого типа, включая пневматическую сеялку, зерновую сеялку или почвообрабатывающее орудие, где может потребоваться минимизировать занос или управлять заносом, когда орудие перемещается по полю. Таким образом, в зависимости от типа сельскохозяйственного орудия 10, инструменты 200 могут быть высевающими секциями сеялки, секциями зерновой сеялки или почвообрабатывающими инструментами. Для целей раскрытия понятия «инструменты» и «высевающие секции» используются взаимозаменяемо.
Исполнительные механизмы с переменным регулируемым прижимным усилием (такие как блоки 100, 500 управления прижимным усилием, которые будут обсуждены далее) располагаются так, чтобы прикладывать изменяющееся или регулируемое прижимное усилие к инструментам 200, когда сельскохозяйственное орудие 10 перемещается по полю. Исполнительные механизмы с переменным регулируемым прижимным усилием могут быть гидравлическими, пневматическими или электрическими. Как показано на фиг. 1А, каждый инструмент 200 может иметь свой собственный исполнительный механизм с переменным регулируемым прижимным усилием, прикладывающий прижимное усилие к этому инструменту 200. В альтернативном варианте осуществления, как показано на фиг. 1B, один исполнительный механизм с переменным регулируемым прижимным усилием может взаимодействовать с множеством инструментов 200, представляющим собой инструментальную секцию 210, так, чтобы один исполнительный механизм с переменным регулируемым прижимным усилием (такой как блоки 100, 500 управления прижимным усилием, которые будут описаны далее) прикладывал изменяемое или регулируемое прижимное усилие ко всем инструментам 200, образующим инструментальную секцию 210. На каждой из соответствующих правой и левой сторон 15R, 15L навесного бруса 14 могут находиться одна или более инструментальных секций 210.
Исполнительные механизмы с переменным регулируемым прижимным усилием
На фиг. 4-6 показан гидравлический исполнительный механизм с переменным регулируемым прижимным усилием (который в дальнейшем упоминается как «блок 100 управления прижимным усилием») согласно одному варианту осуществления. Как показано на фиг. 4, блок 100 управления прижимным усилием включает в себя коллектор 110 и цилиндр 130. Коллектор 110 включает в себя корпус 102 коллектора, трубопровод 120 управления подъемом и полость, размер которой рассчитан на прием клапана 140 регулирования давления опускания. Следует понимать, что, как показано на фиг. 4-6, клапан 140 регулирования давления опускания соединен с коллектором 110 и, таким образом, соединен с цилиндром 130; аналогичным образом, клапан поддерживается коллектором 110 и, таким образом, поддерживается цилиндром 130. Корпус 102 коллектора включает в себя питающий канал 112, возвратный канал 114 и канал 116 управления подъемом. Каждый канал 112, 114, 116 включает в себя левый фитинг, правый фитинг и канал, соединяющий левый и правый фитинги. Как показано на виде в разрезе на фиг. 6, корпус 110 коллектора включает в себя диагностический канал 118 управляющего давления и канал 111 соединения с камерой подъема.
Цилиндр 130 включает в себя гильзу 132, шток 170 и сальник 138. Цилиндр 130 установлен на коллекторе 110. В варианте выполнения, показанном на фиг. 4-6, гильза 132 установлена на корпусе 102 коллектора. Как показано на виде в разрезе на фиг. 6, сальник 138 установлен на нижнем конце цилиндра 132, а шток 170 установлен с возможностью скольжения внутри сальника 138. Шток 170 содержит поршень 174, который разделяет внутренний объем цилиндра 132 на камеру 136 опускания и камеру 134 подъема.
Клапан 140 регулирования давления опускания может быть электрогидравлическим клапаном сброса/понижения давления и может включать в себя соленоид 142, имеющий электрический порт 144. Клапан 140 регулирования давления опускания может включать в себя клапан 150 регулирования потока, имеющий впускное отверстие 152, выпускное отверстие 154 и отверстие 158 управления (фиг. 1C). Клапан 140 регулирования давления опускания может быть пропорциональным клапаном сброса давления PDR08-P, поставляемым компанией «Hydac International GmbH», расположенной в городе Зульцбах, Германия («Hydac»). Клапан 140 регулирования давления опускания может быть установлен на корпусе 102 коллектора и может быть ориентирован, по существу, параллельно цилиндру 130.
Как показано на фиг. 6, впускное отверстие 152 клапана 140 регулирования давления опускания сообщается по текучей среде с питающим каналом 112. Выпускное отверстие 154 сообщается по текучей среде с возвратным каналом 114. Отверстие 158 управления сообщается по текучей среде с диагностическим каналом 118 управляющего давления. Диагностический канал 118 управляющего давления сообщается по текучей среде с каналом 111 соединения с камерой подъема. Канал 111 соединения с камерой подъема сообщается по текучей среде с камерой 136 опускания. Диагностический канал 118 управляющего давления и канал 111 соединения с камерой подъема вместе образуют канал, обеспечивающий сообщение по текучей среде отверстия 158 управления сообщается с камерой 136 опускания. Трубопровод 120 обеспечивает сообщение по текучей среде канала 116 управления подъемом с камерой 134 подъема. Диагностический канал 118 управляющего давления может быть закрыт крышкой 119, которую можно снять, чтобы установить манометр, датчик или другое устройство для измерения давления, сообщающееся по текучей среде с отверстием 158 управления.
При работе клапан 150 регулирования потока устанавливает управляющее давление в отверстии 158 управления путем избирательного протекания потока между отверстием 158 управления, впускным отверстием 152 и выпускным отверстием 154, как это известно в данной области техники. Соленоид 142 изменяет рабочее состояние клапанов 140 регулирования давления опускания (например, путем приложения усилия к элементу клапана 150 регулирования потока) для изменения управляющего давления, как это известно в данной области техники. Управляющее давление, установленное соленоидом 142, может соответствовать сигналу, принимаемому на электрическом порту 144. Таким образом, клапан 140 регулирования давления опускания выполнен с возможностью поддержания любого одного из непрерывного диапазона давлений в канале 152 управления и дополнительно выполнен с возможностью избирательного поддержания одного из таких непрерывных диапазонов давлений на основе сигнала, принятого соленоидом 142.
Как показано на фиг. 2 и 3, для целей присоединения корпус 102 коллектора блока 100 управления прижимным усилием включает в себя проушину 182 (фиг. 3-6), и шток 170 включает в себя серьгу 172. Как показано на фиг. 3, скоба 214 крепления блока управления установлена на передней скобе 212 высевающей секции 200. Блок 100 управления прижимным усилием шарнирно соединен со скобой 214 крепления блока управления посредством верхнего пальца 215-1, проходящего через проушину 182. Блок 100 управления прижимным усилием шарнирно присоединен на нижнем конце к рычажному механизму 216 параллелограммного типа нижним пальцем 215-2, который проходит через серьгу 172. Коллектор 700 может быть установлен на навесном брусе 14.
Обращаясь снова к фиг. 3, рычажный механизм 216 параллелограммного типа поддерживает высевающую секцию 200 от навесного бруса 14, позволяя каждой высевающей секции перемещаться вертикально независимо от навесного бруса и других расположенных на расстоянии друг от друга высевающих секций для того, чтобы приспособиться к неровностям почвы или к столкновениям высевающих секций с камнем или другим препятствием при буксировке сеялки по полю. Датчик 364 плавности движения, такой как акселерометр, установлен на высевающей секции 200 и предназначен для измерения вертикальной скорости и ускорения высевающей секции 200. Каждая высевающая секция 200 дополнительно включает в себя установочную скобу 220, на которой установлена опорная балка 222 бункера и подрамник 224. Опорная балка 222 бункера поддерживает бункер 226 для семян и бункер 228 для удобрений, а также функционально поддерживает дозатор 230 семян и семяпровод 232. Подрамник 224 функционально поддерживает узел 234 нарезки борозды и узел 236 заделки борозды.
При работе высевающей секции 200 узел 234 нарезки борозды нарезает борозду или траншею 38 для высева семян на поверхности 40 почвы при буксировке сеялки 10 по полю. Бункер 226 для семян, который вмещает семена, подлежащие посадке, обеспечивает постоянную подачу семян 42 в дозатор 230 семян. Дозатор 230 семян каждой высевающей секции 200 входит в зацепление с приводным элементом 372 через механизм 370 сцепления, так что отдельные семена 42 дозируются и выводятся в семяпровод 232 через равные промежутки времени на основании плотности высева семян и скорости, с которой сеялка буксируется по полю. Приводной элемент 372 и механизм 370 сцепления могут относиться к типам, раскрытым патентном документе US2010/0162931, раскрытие которого полностью включено в описание путем ссылки. Датчик 360 высева семян, такой как оптический датчик, поддерживается семяпроводом 232 и предназначен для обнаружения наличия семян 42 при их прохождении. Семя 42 падает с конца семяпровода 232 в борозду 38, и семена 42 закрываются почвой посредством узла 236 заделочного колеса.
Узел 234 нарезки борозды может включать в себя пару дисковых ножей 244 для нарезки борозды и пару копирующих колес 248, избирательно регулируемых по вертикали относительно дисковых ножей 244 посредством механизма 268 регулирования глубины. Механизм 268 регулирования глубины поворачивается вокруг датчика 362 прижимного усилия, который может содержать палец, снабженный тензодатчиками для измерения силы, действующей на копирующие колеса 248 со стороны почвы 40. Датчик 362 прижимного усилия может быть того типа, который описан в патентном документе US8561472, раскрытие которого включено в описание путем ссылки. В других вариантах осуществления датчик прижимным усилием относится к типам, раскрытым в патентном документе US6389999, раскрытие которого полностью включено в описание путем ссылки. Дисковые ножи 244 поддерживаются с возможностью вращения на сошнике 254 в зависимости от подрамника 224. Рычаги 260 копирующего колеса шарнирно поддерживают копирующие колеса 248 со стороны подрамника 224. Копирующие колеса 248 установлены с возможностью вращения на проходящих вперед рычагах 260 копирующих колес.
На фиг. 2 и 7 схематично показана электрическая система 300 управления для управления и измерения прижимного усилия и других функций навесного оборудования. Как показано на фиг. 2, GPS-приемник 366 может быть установлен на верхней части трактора 5, а контрольно-измерительное устройство 310 может быть установлено в кабине 7 трактора 5. Один или более датчиков 368 скорости, таких как датчик скорости колеса на основе эффекта Холла или радарный датчик скорости, могут быть также установлены на тракторе 5.
Контрольно-измерительное устройство 310 электрически связано с клапанами 140 регулирования давления опускания и клапаном регулирования давления подъема, а также к приводным элементам 370 и механизмам 372 сцепления. Контрольно-измерительное устройство 310 электрически связано с датчиками 362 прижимного усилия, а также с датчиками 360 высева семян, датчиками 362 прижимного усилия, датчиками 368 скорости и GPS-приемником 366. Следует понимать, что контрольно-измерительное устройство 310 содержит электронный блок управления.
Контрольно-измерительное устройство 310 может включать в себя центральный процессор (ЦП) 316, запоминающее устройство 314 и графический интерфейс 312 пользователя (ГИП), позволяющий пользователю просматривать и вводить данные в контрольно-измерительное устройство 310. Контрольно-измерительное устройство 310 может иметь тип, раскрытый в патентном документе US8386137, раскрытие которого полностью включено в описание путем ссылки, так что контрольно-измерительное устройство 310 способно отображать информацию о прижимном усилии и посеве для пользователя.
Альтернативно, управление может быть реализовано с помощью блока управления несколькими рядами или блока управления одним рядом, как описано в публикации РСТ № WO2014018717, которая включена в описание во всей своей полноте путем ссылки.
Обращаясь снова к фиг. 8, на ней показан вариант выполнения системы 400 управления текучей средой в связи с четырьмя блоками 100 управления прижимным усилием, каждый из которых может быть соединен с соответствующей высевающей секцией 200 (не показана), поддерживаемой навесным брусом 14. Система управления текучей средой включает в себя средство 430 подачи, которое может иметь впускное отверстие «power-beyond», расположенное на тракторе 5, и бак 440, который может иметь сливное отверстие «power-beyond», расположенное на тракторе 5. Средство 430 подачи и бак 440 сообщаются по текучей среде с коллектором 700.
В другом варианте осуществления коллектор включает в себя фильтр (например, модель № CP-SAE-120, поставляется компанией Hydac), обратный клапан (например, модель № RV16A-01, поставляется компанией Hydac), поплавковый переключающий клапан (например, модель № PD10-41-0-N-170, поставляется компанией Hydraforce, Inc., 500 Barclay Blvd., Lincolnshire, Illinois 60069) и клапан регулирования давления подъема (такой как клапан, эквивалентный клапану 140 регулирования давления опускания, описанному выше). Средство 430 подачи сообщается по текучей среде с фильтром, отверстием нагнетания клапана регулирования давления подъема и питающим шлангом 422, соединенным с впускным отверстием коллектора. Бак 440 сообщается по текучей среде с обратным клапаном, сливным отверстием клапана регулирования давления подъема и возвратным шлангом 424, подсоединенным к выпускному отверстию коллектора. Отверстие управления клапана регулирования давления подъема сообщается по текучей среде с первым отверстием поплавкового переключающего клапана. Второе отверстие поплавкового переключающего клапана сообщается по текучей среде с возвратным шлангом 424. Третье отверстие поплавкового переключающего клапана сообщается по текучей среде с шлангом 426 управления подъемом, соединенным с отверстием управления подъемом коллектора.
При работе клапан регулирования давления подъема принимает командный сигнал и поддерживает необходимое давление в отверстии управления клапана регулирования давления подъема в соответствии с командным сигналом. Когда давление в шланге 426 управления подъемом превышает пороговое значение давления в возвратном шланге 424 (например, 170 psi), например, когда одна или более высевающих секций 200 опускаются относительно навесного бруса, вызывая значительный поток текучей среды из шланга управления подъемом через поплавковый переключающий клапан, поплавковый переключающий клапан может быть выполнен с возможностью переключения в положение, так что текучая среда может обойти клапан 740 регулирования давления подъема и возвращаться в возвратный шланг 424.
Как показано на фиг. 8, питающий шланг 422 сообщается по текучей среде с питающим каналом 112 первого блока 100-1 управления прижимным усилием. Питающий канал 112 каждого блока 100 управления прижимным усилием сообщается по текучей среде с питающим каналом 112 соседнего блока 100 управления прижимным усилием через междурядный питающий шланг 412. Дистальное отверстие питающего канала 112 дистального блока управления прижимным усилием (например, правое отверстие впускного канала блока 100-4 управления прижимным усилием, как показано на фиг. 8) может быть закрыто крышкой 450. Следует принимать во внимание с учетом фиг. 4 и приведенного выше описания, что первый конец междурядного питающего шланга 412 подсоединен к питающему каналу 112 и поддерживается питающим каналом 112 первого блока управления прижимным усилием (например, блока 100-1 управления прижимным усилием), а второй конец междурядного питающего шланга 412 подсоединен к питающему каналу 112 второго, предпочтительно соседнего, блока управления прижимным усилием (например, блока 100-2 управления прижимным усилием) и поддерживается им.
Возвратный шланг 424 сообщается по текучей среде с обратным каналом 114 первого блока 100-1 управления прижимным усилием. Возвратный канал 114 каждого блока 100 управления прижимным усилием сообщается по текучей среде с обратным каналом 114 соседнего блока 100 управления прижимным усилием через междурядный возвратный шланг 414. Дистальное отверстие обратного канала 114 дистального блока управления прижимным усилием (например, правое отверстие обратного канала блока 100-4 управления прижимным усилием, как показано на фиг. 8) закрыто крышкой 450. Следует принимать во внимание с учетом фиг. 4 и приведенного выше описания, что первый конец междурядного возвратного шланга 414 подсоединен к обратному каналу 114 первого блока управления прижимным усилием (например, блока 100-1 управления прижимным усилием) и поддерживается им, а второй конец междурядного возвратного шланга 414 подсоединен к обратному каналу 114 второго, предпочтительно соседнего, блока управления прижимным усилием (например, блока 100-2 управления прижимным усилием) и поддерживается им.
Шланг 426 управления подъемом сообщается по текучей среде с каналом 116 управления подъемом первого блока 100-1 управления прижимным усилием. Канал 116 управления подъемом каждого блока 100 управления прижимным усилием сообщается по текучей среде с каналом 116 управления подъемом соседнего блока 100 управления прижимным усилием через междурядный шланг 416 для подъема. Дистальное отверстие канала 116 управления подъемом дистального блока управления прижимным усилием (например, правое отверстие канала управления подъемом блока 100-4 управления прижимным усилием, как показано на фиг. 8) закрыто крышкой 450. Следует принимать во внимание с учетом фиг. 4 и приведенного выше описания, что первый конец междурядного шланга 416 для подъема подсоединен к каналу 116 управления подъемом первого блока управления прижимным усилием (например, блока 100-1 управления прижимным усилием) и поддерживается им, а второй конец междурядного шланга 416 для подъема подсоединен к каналу 116 управления подъемом второго, предпочтительно соседнего, блока управления прижимным усилием (например, блока 100-2 управления прижимным усилием) и поддерживается им.
Следует понимать в свете фиг. 8 и приведенного выше соответствующего описания, что каждый из блоков 100 управления прижимным усилием (и, таким образом, связанные с ними камеры 136 опускания каждого из исполнительных механизмов 130) сообщаются по текучей среде «последовательно», то есть текучая среда из питающего шланга 422 проходит через питающий канал 112 блока 100-1 управления прижимным усилием до достижения питающего канала 112 блока 100-2 управления прижимным усилием. Аналогичным образом, каждая из камер 134 подъема сообщается по текучей среде «последовательно», то есть текучая среда из шланга 426 управления подъемом проходит через канал 116 управления подъемом блока 100-1 управления прижимным усилием до достижения канала 116 управления подъемом блока 100-2 управления прижимным усилием.
Следует понимать, что одна система 400 управления текучей средой может управлять всеми высевающими секциями 200 сеялки 10, буксируемой навесным брусом 14, или их поднаборами. Кроме того, следует понимать, что множество систем 400 управления текучей средой могут управлять отдельными поднаборами или секциями высевающей секции 200 так, чтобы давление подъема в каждой секции можно было регулировать независимым образом. Например, три системы 400 управления текучей средой могут использоваться для независимого управления правосторонней секцией сеялки, содержащей первое множество высевающих секций 200 сеялки, установленных на правой части навесного бруса 14, причем центральная секция содержит второе множество высевающих секций 200 сеялки, установленных в центральной части навесного бруса 14, и левой секцией, содержащей третье множество высевающих секций 200, установленных на левой части навесного бруса 14.
При работе системы 400 управления текучей средой и электронной системы 300 управления контрольно-измерительное устройство 310 принимает сигнал прижимного усилия от каждого датчика 362 прижимного усилия. Контрольно-измерительное устройство 310 использует сигнал прижимного усилия для отображения прижимного усилия, измеренного в каждой высевающей секции 200 сеялки. Контрольно-измерительное устройство 310 использует сигнал прижимного усилия для выбора целевого результирующего прижимного усилия, которое должно прикладываться к каждой высевающей секции 200 каждым блоком 100 управления прижимным усилием. Например, если сигнал прижимного усилия для данной высевающей секции 200 превышает пороговое значение, контрольно-измерительное устройство 310 уменьшает целевое результирующее прижимное усилие, которое должно прикладываться соответствующим блоком 100 управления. В других вариантах осуществления контрольно-измерительное устройство 310 позволяет пользователю легко выбрать целевое результирующее прижимное усилие для каждого блока 100 управления прижимным усилием. После выбора целевого результирующего прижимного усилия для каждого блока управления прижимным усилием контрольно-измерительное устройство 310 подает управляющие сигналы в каждый клапан 140 регулирования давления опускания и клапан 740 регулирования давления подъема так, что результирующее прижимное усилие, прикладываемое каждым блоком 100 управления прижимным усилием, ближе всего приближается к соответствующему целевому результирующему прижимному усилию. В некоторых вариантах осуществления контрольно-измерительное устройство 310 выбирает необходимые управляющие давления в соответствии со способами, раскрытыми в международной публикации WO2013022835, раскрытие которой полностью включено в описание путем ссылки.
На фиг. 9 показан гидравлический исполнительный механизм с переменным регулируемым прижимным усилием (который в дальнейшем упоминается как «блок 500 управления прижимным усилием») согласно альтернативному варианту осуществления, вид в разрезе. В этом варианте осуществления блок 500 управления прижимным усилием включает в себя модифицированный коллектор 510 и модифицированный трубопровод 520, что позволяет использовать отдельный клапан 140-1 регулирования давления подъема для регулирования давления в камере 134 подъема. Отдельный клапан 140-1 регулирования давления подъема может быть, по существу, аналогичен клапану 140 регулирования давления опускания. Следует понимать, что правая сторона коллектора 510 аналогична коллектору 110 за исключением того, что канал 116 управления подъемом исключен.
Коллектор 510 включает в себя корпус 502 коллектора, трубопровод 520 управления подъемом и полость, размер которой рассчитан для приема отдельного клапана 140-1 регулирования давления подъема. Корпус 502 коллектора включает в себя питающий канал 512 и возвратный канал 514. Каждый канал 512, 514 включает в себя левый фитинг, правый фитинг и отверстие, соединяющее левый и правый фитинги. Корпус 510 коллектора включает в себя диагностический канал 518 управляющего давления и канал 511 соединения с камерой опускания.
Впускное отверстие отдельного клапана 140-1 регулирования давления подъема сообщается по текучей среде с питающим каналом 512. Выпускное отверстие отдельного клапана 140-1 регулирования давления подъема сообщается по текучей среде с обратным каналом 514. Отверстие управления отдельного клапана 140-1 регулирования давления подъема сообщается по текучей среде с диагностическим каналом 518 управляющего давления. Диагностический канал 518 управляющего давления сообщается по текучей среде с каналом 511 соединения с камерой опускания. Канал 511 соединения с камерой опускания сообщается по текучей среде с камерой 136 опускания. Диагностический канал 518 управляющего давления и канал 511 соединения с камерой опускания вместе образуют канал, обеспечивающий сообщение по текучей среде отверстия управления отдельного клапана 140-1 регулирования давления подъема с камерой 136 опускания. Трубопровод 520 содержит канал 511 соединения с камерой опускания, сообщающийся по текучей среде с камерой 134 подъема. Диагностический канал 518 управляющего давления может быть закрыт крышкой (не показана), которую можно снять, чтобы установить манометр или другое устройство для измерения давления, сообщающееся по текучей среде с отверстием управления отдельного клапана 140-1 регулирования давления подъема.
На фиг. 10 показана модифицированная система 600 управления текучей средой, установленная на четырех блоках 500 управления прижимным усилием, каждый из которых может быть связан с соответствующей высевающей секцией 200 (не показана), поддерживаемой навесным брусом 14. Система 600 управления текучей средой может включать в себя одно и то же средство 430 подачи и бак 440 трактора 5 в виде системы 400 управления текучей средой.
Питающий канал 112 и возвратный канал 114 первого блока 500-1 управления прижимным усилием сообщаются по текучей среде со средством 430 подачи и баком 440, соответственно. Аналогично системе 400 управления текучей средой, питающий канал 112 и возвратный канал 114 каждого блока 500 управления прижимным усилием сообщаются по текучей среде с питающим каналом 112 и обратным каналом 114, соответственно, соседнего блока 500 управления прижимным усилием через питающий шланг 412 и возвратный шланг 414, соответственно.
Аналогичным образом, питающий канал 512 и возвратный канал 514 крайнего правого блока 500-4 управления прижимным усилием сообщаются по текучей среде со средством 430 подачи и баком 440, соответственно. Питающий канал 512 и возвратный канал 514 каждого блока 500 управления прижимным усилием сообщаются по текучей среде с питающим каналом 512 и обратным каналом 514, соответственно, соседнего блока 500 управления прижимным усилием через междурядный питающий шланг 612 и междурядный возвратный шланг 614, соответственно.
Отдельный клапан 140-1 регулирования давления подъема электрически соединен с контрольно-измерительным устройством 130. При работе модифицированной системы 600 управления текучей средой контрольно-измерительное устройство 130 выполнено с возможностью выбора давления как клапана 140-1 регулирования давления подъема, так и клапана 140 регулирования давления опускания. Контрольно-измерительное устройство 130 выполнено с возможностью изменения заданного давления подъема и давления прижима для каждого блока 500 управления прижимным усилием на основании сигнала прижимного усилия, принятого от датчика 362 прижимного усилия соответствующей высевающей секции 200.
В других вариантах осуществления блока 500 управления прижимным усилием канал 511 соединения с камерой опускания сообщается по текучей среде с отверстием управления клапана 140-1 регулирования давления подъема через управляемый запорный клапан, чье отверстие управляющего давления сообщается по текучей среде с отверстием управления клапана 140-1 регулирования давления подъема, так что давление подъема прикладывается только тогда, когда давление опускания превышает пороговое значение. Аналогичным образом, в других вариантах осуществления блока 100 управления прижимным усилием канал 116 управления подъемом сообщается по текучей среде с трубопроводом 120 через управляемый запорный клапан, чье отверстие управляющего давления сообщается по текучей среде с отверстием управления клапана 140 регулирования давления опускания, так что давление подъема прикладывается только тогда, когда давление сброса превышает пороговое значение. В таких вариантах осуществления управляемый запорный клапан может быть расположен внутри корпуса коллектора.
В других вариантах осуществления блока 100 управления прижимным усилием и блока 500 управления прижимным усилием клапан 140 регулирования давления опускания, и/или клапан 740 регулирования давления подъема, и/или отдельный клапан 140-1 регулирования давления подъема заменены на клапаны сброса давления с ручным управлением, так что пользователь может вручную выбирать давление подъема и/или давление опускания, прикладываемое к каждой высевающей секции 200.
В других вариантах осуществления блока 100 управления прижимным усилием в камеру 134 подъема встроена пружина, поэтому пружина сжимается при выдвигании штока 170. Нижнюю часть пружины можно регулировать снаружи цилиндра (например, посредством блокируемого скользящего механизма, поддерживающего круговое кольцо, в которое упирается пружина), так что пользователь может регулировать силу сжатия и реакцию пружины при выдвигании штока. В таких вариантах осуществления трубопровод 120 и канал 116 управления подъемом могут быть исключены.
Способы предотвращения заноса
Понятие «занос» следует рассматривать как означающее, что любая часть с правой стороны 15R или с левой стороны 15L навесного бруса 14 находится позади поперечной линии 3, перпендикулярной направлению движения 4 вперед. Следует понимать, что раскрытый способ предотвращения заноса не выполняется тогда, когда сельскохозяйственное орудие совершает поворот, что можно определить с помощью GPS.
В общем, способ предотвращения, минимизации или управления заносом навесного оборудования включает в себя измерение сил (то есть прижимных усилий или моментов сил) на каждой из соответствующих сторон 15R, 15L навесного бруса 14, суммирование усилий на каждой стороне для определения значения общего усилия на каждой стороне 15R, 15L и затем сравнение значений общих усилий на каждой стороне для определения того, являются ли эти значения общих усилий уравновешенными. Если значения общих прижимных усилий на соответствующих сторонах не уравновешены, что приводит к смещению сельскохозяйственного орудия из-за неуравновешенных усилий, один или более исполнительных механизмов с переменным регулируемым прижимным усилием (например, блоки 100, 500 управления прижимным усилием или пневматические или электрические исполнительные механизмы с переменным регулируемым прижимным усилием) на одной или обеих соответствующих сторонах 15R, 15L навесного бруса 14 приводятся в действие для увеличения и/или уменьшения прижимных усилий, прикладываемых к инструментам 200 или к инструментальным секциям 210 до тех пор, пока не будут уравновешены значения общего усилия на каждой стороне 15R, 15L.
Используемое в описании понятие «уравновешенный» означает, что значение общего усилия на правой стороне 15R навесного бруса 14 и значение общего усилия на левой стороне 15L навесного бруса 14 являются одинаковыми, или разность между ними является такой, что разность значений общих усилий не приводит к заносу любой части с правой стороны 15R навесного бруса 14 или любой части с левой стороны 15L навесного бруса позади поперечной линии 3. Следует принимать во внимание, что любая комбинация увеличения или уменьшения прижимного усилия, прикладываемого к инструментам 200 или инструментальным секциям 210, может использоваться для уравновешивания усилий на соответствующих сторонах, в то же время поддерживая приемлемую или достаточную величину прижимного усилия на инструментах 200 или инструментальных секциях 210 для поддержания соприкосновения с землей и необходимой глубины борозды или глубины проникновения в почву и минимизации уплотнения почвы.
Уравновешивание усилий может быть достигнуто посредством системы управления с обратной связью или системы управления без обратной связи путем изменения прикладываемого прижимного усилия, которое задается системой с обратной связью или системой без обратной связи.
Пример 1 (уравновешивание прижимных усилий, прикладываемых к отдельным инструментам)
В вариантах выполнения, показанных на фиг. 1A, в которых каждый инструмент 200 сельскохозяйственного орудия 10 имеет связанный с ним исполнительный механизм с переменным регулируемым прижимным усилием (например, блок 100, 500 управления прижимным усилием), измеряется прикладываемое прижимное усилие, действующее на каждый инструмент 200. Измеренные прижимные усилия, действующие на каждый инструмент 200 на правой стороне 15R навесного бруса 14, суммируются для определения общего прижимного усилия справа. Аналогичным образом, прижимные усилия, действующие на каждый инструмент 200 на левой стороне 15L навесного бруса 14, суммируются для определения общего прижимного усилия слева. Следует понимать, что общие прижимные усилия правой стороны и левой стороны могут быть средними по отношению к прикладываемому прижимному усилию на этой стороне, но, если имеется симметричное количество инструментов 200 на правой стороне 15R и на левой стороне 15L, усреднение не требуется. Затем производится сравнение общего прижимного усилия справа и общего прижимного усилия слева для того, чтобы определить, уравновешены ли между собой общее прижимное усилие справа и общее прижимное усилие слева. Если общие прижимные усилия не уравновешены между правой стороной 15R и левой стороной 15L, то прикладываемое прижимное усилие на стороне, имеющей более низкое общее прижимное усилие, увеличивается, и прикладываемое прижимное усилие на стороне, имеющей более высокое общее прижимное усилие, уменьшается до тех пор, пока не будут уравновешены общие прижимные усилия, прикладываемые к соответствующим сторонам 15R, 15L.
Уравновешивание всех приложенных прижимных усилий может быть достигнуто путем прикладывания половины разности прижимных усилий к одной стороне, увеличивая прижимное усилие на этой одной стороне, и путем прикладывания половины разности прижимных усилий к другой стороне, уменьшая прижимное усилие на этой другой стороне. В другом варианте осуществления изменение прижимного усилия, прикладываемого для уравновешивания усилий, может быть равномерно распределено по всем инструментам 200 на соответствующих правой и левой сторонах. В еще одном варианте осуществления уменьшение прижимного усилия к одной из сторон может быть достигнуто за счет приложения усилия подъема к инструментам 200 на одной стороне, тем самым уменьшая общее прикладываемое прижимное усилие к этой стороне, в то же время поддерживая прикладываемое прижимное усилие на уровне, достаточном для поддержания контакта с землей и необходимой глубины борозды или глубины проникновения в почву.
Например, в 16-ти рядной сеялке, если общая сумма приложенного прижимного усилия к инструментам или высевающим секциям 200 на правой стороне на 320 силовых единиц (ньютонов или фунтов) больше, чем общая сумма приложенного прижимного усилия к инструментам или высевающим секциям 200 на левой стороне 15L, дополнительные 160 единиц силы могут быть приложены к высевающим секциям 200 на левой стороне 15L, и 160 единиц силы могут быть исключены из высевающих секций 200 на правой стороне 15R. Кроме того, каждая из восьми высевающих секций 200 на левой стороне 15L может быть увеличена на 20 единиц силы, и каждая из восьми высевающих секций 200 на правой стороне 15R может быть уменьшена на 20 единиц силы. В качестве альтернативы, все 320 единиц силы могут быть приложены к высевающим секциям 200 на левосторонней секции 15L, чтобы увеличить прижимное усилие для каждой высевающей секции 200 на 40 единиц силы.
Пример 2 (уравновешивание прижимных усилий, прикладываемых к инструментальным секциям)
В вариантах выполнения, показанных на фиг. 1B, в которых сельскохозяйственное орудие 10 включает в себя инструментальные секции 210, измеряется прикладываемое прижимное усилие, действующее на каждую инструментальную секцию 210. Может производиться одно измерение прижимного усилия для инструментальной секции 210, или может использоваться среднее прижимное усилие для инструментальной секции 210 путем измерения прижимного усилия, прикладываемого к каждому инструменту 200, образующему инструментальную секцию 210, и усреднения прижимных усилий инструментов 200, образующих инструментальную секцию 210. Измеренное или среднее прижимное усилие, действующее на каждую инструментальную секцию 210 на правой стороне 15R навесного бруса 14, суммируется для того, чтобы определить общее прижимное усилие на правой стороне. Аналогичным образом, измеренное или среднее прижимное усилие, действующее на каждую инструментальную секцию 210 на левой стороне 15L навесного бруса 14, суммируется для того, чтобы определить общее прижимное усилие слева. Следует понимать, что общие прижимные усилия правой стороны и левой стороны могут иметь средние значения приложенных прижимных усилий на этой стороне, но, если имеется симметричное количество инструментальных секций 210 на правой стороне 15R и на левой стороне 15L, усреднение с каждой стороны не требуется. Затем производится сравнение общего прижимного усилия справа и общего прижимного усилия слева для того, чтобы определить, уравновешены ли между собой общее прижимное усилие справа и общее прижимное усилие слева. Если общие прижимные усилия не уравновешены между правой стороной 15R и левой стороной 15L, то прикладываемое прижимное усилие на стороне, имеющей более низкое общее прижимное усилие, увеличивается, и прикладываемое прижимное усилие на стороне, имеющей более высокое общее прижимное усилие, уменьшается до тех пор, пока не будут уравновешены общие прижимные усилия, прикладываемые к соответствующим сторонам 15R, 15L.
Уравновешивание всех приложенных прижимных усилий может быть достигнуто путем прикладывания половины разности прижимных усилий к одной стороне, чтобы увеличить прижимное усилие на этой одной стороне, и путем прикладывания половины разности прижимных усилий к другой стороне, чтобы уменьшить прижимное усилие на этой другой стороне. В другом варианте осуществления изменение приложенного прижимного усилия, прикладываемого для уравновешивания усилий, может быть равномерно распределено по всем инструментальным секциям на соответствующих правой и левой сторонах. В еще одном варианте осуществления уменьшение прижимного усилия к одной из сторон может быть достигнуто за счет приложения усилия подъема к инструментальным секциям на одной стороне, тем самым уменьшая общее прикладываемое прижимное усилие к этой стороне, в то же время поддерживая прикладываемое прижимное усилие на уровне, достаточном для поддержания контакта с землей и необходимой глубины борозды или глубины проникновения в почву.
Например, в 16-ти рядной сеялке с четырьмя инструментальными секциями на каждой стороне (то есть каждая инструментальная секция содержит две высевающие секции), если общая сумма прижимных усилий, приложенных к инструментальной секции на правой стороне, составляет 320 единиц силы (ньютонов или фунтов), больше, чем общая сумма прижимных усилий, приложенных к инструментальным секциям на левой стороне 15L, дополнительные 160 единиц силы могут быть приложены к четырем инструментальным секциям на левой стороне 15L, и 160 единиц силы могут быть исключены из четырех правосторонних инструментальных секций 15R. Кроме того, каждая из четырех инструментальных секций на левой стороне 15L может быть увеличена на 40 единиц силы, а каждая из четырех инструментальных секций на правой стороне 15R может быть уменьшена на 40 единиц силы. В качестве альтернативы, все 320 единиц силы могут быть приложены к четырем инструментальным секциям в левосторонней секции 15L, чтобы увеличить каждую инструментальную секцию на 80 единиц силы.
Пример 3 (уравновешивающие моменты сил)
В другом варианте осуществления может быть рассчитан момент силы для каждого инструмента 200 или каждой инструментальной секции. Каждый момент силы рассчитывается путем умножения прижимного усилия, приложенного к данному инструменту 200 или к центральной части инструментальной секции, на его боковое расстояние от центральной точки 6 навесного бруса 14. Моменты сил для всех инструментов или инструментальных секций на правой стороне 15R навесного бруса 14 суммируются для определения общего момента на правой стороне. Аналогичным образом, моменты сил для всех инструментов или инструментальных секций на левой стороне 15L навесного бруса 14 суммируются для определения общего момента на левой стороне. Затем сравнивают общий момент на правой стороне и общий момент на левой стороне, и, если они не уравновешены, моменты можно изменить, увеличивая прикладываемое прижимное усилие (и, следовательно, увеличивая моменты) на стороне, которая имеет меньшее значение общего момента, уменьшая прикладываемое прижимное усилие (и, следовательно, уменьшения момента) на стороне, которая имеет более высокое значение общего момента, или комбинацию обоих. Следует понимать, что при уравновешивании моментов изменение приложенного прижимного усилия на инструментах 200 или инструментальных секциях на внешних боковых концах навесного бруса 14 обеспечит наибольшее изменение момента для наименьшего изменения прижимного усилия из-за их большего расстояния от центральной точки 6. В одном варианте осуществления изменяемые прижимные усилия могут прикладываться к инструментам 200 или инструментальным секциям на каждом конце навесного бруса 14. В другом варианте осуществления изменяемые прижимные усилия могут прикладываться к каждому из инструментов 200 или каждой из инструментальных секций как на правой стороне 15R, так и на левой стороне 15L. В качестве альтернативы, можно использовать любую комбинацию для создания баланса при одновременном поддержании прикладываемого прижимного усилия на приемлемом уровне для поддержания контакта с грунтом и необходимой глубины борозды или глубины проникновения в почву и минимизации уплотнения.
Способы диагностики
В случае утечки текучей среды в одном из цилиндров 130 блоков 100, 500 управления прижимным усилием контрольно-измерительное устройство 310 может быть выполнено с возможностью выполнения одного или более диагностических процессов для выявления протекающего цилиндра.
В первом диагностическом процессе контрольно-измерительное устройство 310 может подать нулевое или маленькое давление на каждый из клапанов 140 регулирования давления опускания и подать давление подъема на клапан 740 регулирования давления подъема, теоретически достаточное (то есть без утечки в системе) для подъема всех высевающих секций 200. Контрольно-измерительное устройство 310 может предупреждать оператора, чтобы подтвердить, что все высевающие секции 200 были подняты. Затем контрольно-измерительное устройство 310 поочередно повышает давление, подаваемое на каждый клапан 140 регулирования давления опускания, до давления, теоретически достаточного для противодействия давлению подъема и опускания высевающих секций 200. Контрольно-измерительное устройство 310 может предупреждать оператора о проверке того, что каждая высевающая секция 200 была опущена.
Во втором диагностическом процессе контрольно-измерительное устройство 310 подает давление на клапан 740 регулирования давления подъема, достаточное для подъема высевающих секций 200, и одновременно подает давление на все клапаны 140 регулирования давления опускания, теоретически достаточное для поддержания всех высевающих секций 200 в опущенном положении. Контрольно-измерительное устройство 310 может предупредить оператора, чтобы подтвердить, что ни один из высевающих секций 200 не поднялся. Затем контрольно-измерительное устройство 310 поочередно понижает давление, подаваемое на каждый клапан 140 регулирования давления опускания, так что каждая высевающая секция 200 должна подниматься. Контрольно-измерительное устройство 310 может предупредить оператора, чтобы убедиться, что была поднята каждая высевающая секция 200.
В альтернативных вариантах осуществления первого и второго диагностических процессов вместо предупреждения (или в дополнение к предупреждению) оператора о том, что высевающие секции 200 подняты или опущены, контрольно-измерительное устройство 310 определяет, поднята или опущена каждая высевающая секция 200 путем сравнения сигнала, принятого от каждого датчика 362 прижимного усилия, с пороговым значением; пороговое значение может соответствовать небольшому количеству толкающего усилия (например, 4,54 кг (10 фунтов)) на высевающую секцию.
Для специалистов в данной области техники будут очевидны различные модификации варианта выполнения устройства, а также общие принципы и особенности раскрытых системы и способов. Таким образом, изобретение не должно быть ограничено вариантами выполнения устройства, системы и способов, описанными выше и поясненными чертежами, но должно соответствовать самому широкому объему, соответствующему объему формулы изобретения.
Реферат
Изобретение относится к сельскому хозяйству. Способ предотвращения заноса сельскохозяйственного орудия, содержащего навесной брус, имеющий правую сторону и левую сторону относительно центральной линии навесного бруса. На правой стороне функционально поддерживается множество инструментов правой стороны, а на левой стороне функционально поддерживается множество инструментов левой стороны. На правой стороне содержится по меньшей мере один исполнительный механизм с переменным регулируемым прижимным усилием, прикладывающий прижимное усилие ко множеству инструментов правой стороны. На левой стороне содержится по меньшей мере один исполнительный механизм с переменным регулируемым прижимным усилием, прикладывающий прижимное усилие ко множеству инструментов на левой стороне. Способ включает в себя этапы, на которых определяют значение общего усилия правой стороны на основании измеренных прижимных усилий, приложенных ко множеству инструментов правой стороны; определяют значение общего усилия левой стороны на основании измеренных прижимных усилий, приложенных ко множеству инструментов левой стороны; сравнивают указанное значение общего усилия правой стороны и указанное значение общего усилия левой стороны для определения разности общих усилий; если указанные значения общего усилия правой стороны и левой стороны не уравновешены, регулируют по меньшей мере одно из общих усилий правой и левой стороны для уравновешивания значения общего усилия справа и значения общего усилия слева. Обеспечивается прямое перемещение сельскохозяйственного орудия по отношению к направлению движения вперед. 17 з.п. ф-лы, 12 ил.
Комментарии