Надпалубный блок для автоматической системы опознования - RU2257675C2
Код документа: RU2257675C2
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к судовому оборудованию для автоматической системы опознавания. Более конкретно, настоящее изобретение относится к блоку надпалубной аппаратуры для автоматической системы опознавания, то есть, наружному блоку, который может быть использован в качестве надпалубной аппаратуры, которая вместе с подпалубной аппаратурой составляют судовое оборудование для автоматической системы опознавания.
Уровень техники
Введение
Как описано в выложенной публикации патентной заявки Японии №№ Н11-326511 и Н11-331110, автоматическая система опознавания представляет собой систему, предназначенную для обеспечения более безопасной и эффективной навигации судна. Для достижения этого автоматическая система опознавания используется для автоматического приема/передачи радиосообщений, включая статическую и динамическую информацию, между судами или между судном и береговой станцией. В общих чертах, статическая информация, содержащаяся в сообщении, не изменяется просто в результате перемещения судна, отправляющего сообщение, или во времени. Статическая информация включает в себя элементы информации, пригодные для опознавания судна, отправляющего сообщение, такие как название судна, номер ИМО (Международной морской организации), радиопозывной и т.д. Статическая информация также включает в себя другую информацию, относящуюся к характеру и графику текущего рейса судна, отправляющего сообщение. Эта информация может включать в себя что-либо подобное длине, ширине, типу, осадке, пункту назначения, грузу и т.д. судна. В отличие от статической информации, динамическая информация, включающая в себя текущее положение (например, географическую долготу и широту), скорость судна, изменяется во времени и по мере перемещения судна.
Автоматическая система опознавания состоит из берегового оборудования, установленного на береговых станциях, и судового оборудования, установленного на отдельных судах. Для того чтобы реализовать автоматический обмен радиосообщениями судно-судно или судно-береговая станция, судовое оборудование должно содержать следующие устройства.
Во-первых, требуется схема и антенна для выполнения и управления обменом радиосообщений.
Во-вторых, необходимо средство для представления экипажу судна, на котором установлено оборудование, статической и динамической информации, касающейся их судна и других судов. Это может быть осуществлено посредством различных дисплеев, например дисплеев на электронно-лучевой трубке (ЭЛТ) или жидкокристаллических дисплеев (ЖКД), и устройств для вывода звука, включающих громкоговоритель, синтезатор речи и т.д.
В-третьих, может быть необходимо средство для ввода статической информации, касающейся судна. Это может быть осуществлено посредством независимых устройств ввода, например клавиатуры и указательного устройства, или других устройств ввода, связанных с дисплеем, таких как панель управления, предусмотренная на экране дисплея или рядом с экраном дисплея.
В-четвертых, также может быть необходимо средство для получения динамической информации судна посредством, например, измерения. Примеры устройств, используемых для этой цели, содержат беспроводное устройство местоопределения, которое наилучшим образом представлено приемником GPS (ГССМ, глобальной спутниковой системы местоопределения), и различные датчики, такие как гирокомпас, лаг и т.п. В качестве альтернативы, может быть использована другая GNSS (ГНСС, глобальная навигационная спутниковая система) вместо ГССМ или совместно с ней. Используемые ГССМ или ГНСС могут поддерживаться наземными или спутниковыми дополнительными сигналами. Одним из примеров является дифференциальная система ГССМ, которая обеспечивает дифференциальную функцию, используя дополнительный сигнал. Также может быть использована ДПСКБ (дифференциальная подсистема космического базирования), которая представляет собой один вид дифференциальной системы ГССМ, спроектированной с функциями определения дальности, дифференцирования и интегрирования, используя спутниковые сигналы.
Судовое оборудование
На фиг.13 и 14 показано примерное устройство судового оборудования традиционной разработки. Как изображено на чертежах, надпалубная аппаратура состоит из антенны и ее периферийных устройств, в то время как подпалубная аппаратура содержит устройства, установленные в жилой зоне или на рабочих местах, таких как рулевая рубка, экипажа. На чертежах пунктирная линия представляет схематическую границу между надпалубной аппаратурой и подпалубной аппаратурой. Аналогичная граница используется на фиг.1 и 12, которые будут описаны ниже.
В примере, показанном на фиг.13, надпалубная аппаратура включает в себя антенну ГССМ 10а для сигнала “импульс в секунду”, антенну ОВЧ 10b и антенну ГССМ 30а местоопределения. Пример, показанный на фиг.14, дополнительно включает в себя антенну 50а дальнего действия.
В примере, показанном на фиг.13, подпалубная аппаратура включает в себя транспондер 10 автоматической системы опознавания, дисплей 20 автоматической системы опознавания и приемник ГССМ местоопределения 30. Пример, показанный на фиг.14, дополнительно содержит вспомогательное устройство 50 дальнего действия и связанный с ним интерфейс 50b, и гирокомпас 60 и связанный с ним интерфейс 60а.
Как показано, предусмотрены различные линии передачи между местами, где установлена надпалубная аппаратура и подпалубная аппаратура, для соединения между надпалубной аппаратурой и подпалубной аппаратурой.
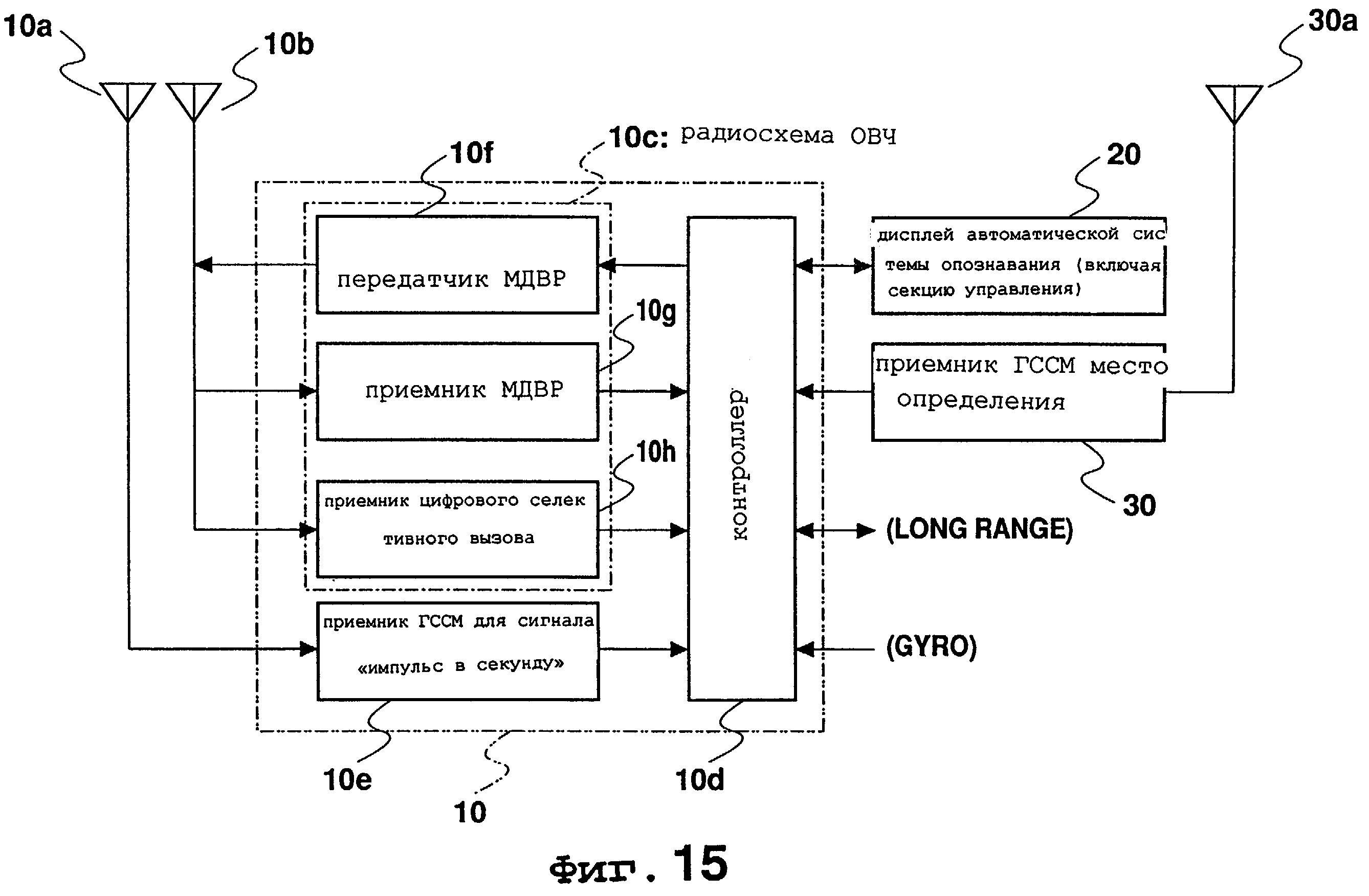
Транспондер 10 автоматической системы опознавания, принадлежащий подпалубной аппаратуре, содержит радиосхему ОВЧ 10с, контроллер 10d и приемник ГССМ 10е для сигнала “импульс в секунду”, как показано на фиг.15. Он также имеет источник питания или аналогичное устройство, которое не показано. Радиосхема ОВЧ 10с выводит вышеупомянутое сообщение и состоит из передатчика 10f МДВР (многостанционного доступа с временным разделением каналов), приемника 10g МДВР, приемника 10h цифрового селективного вызова и других элементов. Передатчик 10f МДВР и приемник 10g МДВР представляют собой схемы для передачи и приема сообщения по методу МДВР. Передатчик 10f МДВР использует антенну ОВЧ 10b для передачи как статической, так и динамической информации, касающейся судна, на котором установлен транспондер 10 автоматической системы опознавания, на другие суда или береговые станции. Приемник 10g МДВР использует антенну 10b ОВЧ для приема от других судов статической и динамической информации, касающейся этих судов. Кроме того, приемник 10h цифрового селективного вызова использует антенну 10b ОВЧ для приема цифровых селективных вызовов для этого судна. Необходимо заметить, что, хотя ради упрощения чертежа каждая из передающей и приемной функций представлена одним блоком, дополнительные системы передачи и приема будут предусмотрены, если они потребуются на практике, в соответствии с международным правом или протоколом.
Контроллер 10d управляет операциями передачи/приема радиосхемы 10с ОВЧ, как описано ниже. Сначала, когда приемник 10g МДВР, установленный на первом судне, принимает статическую и динамическую информацию, касающуюся, например, другого судна, контроллер 10d соответствующим образом вызывает передачу передатчиком 10f МДВР статической и динамической информации, касающейся первого судна. Для выполнения этой операции обмена сообщениями должна быть установлена синхронизация на основе согласования во времени временного интервала МДВР между двумя судами. Для того чтобы это сделать, приемник 10е ГССМ для сигнала “импульс в секунду” использует антенну 10а ГССМ для приема навигационного сообщения от спутника ГССМ, который находится на орбите вокруг Земли, и на основе принятых данных выводит эталонный тактовый сигнал для генерирования сигнала “импульс в секунду”. В соответствии с сигналом “импульс в секунду”, подаваемым от приемника 10е ГССМ для сигнала “импульс в секунду”, контроллер 10d управляет работой радиосхемы 10с ОВЧ для синхронизации работы радиосхемы 10с ОВЧ, такой как согласование во времени интервала времени МДВР с интервалом времени других судов. Для того чтобы гарантировать точный эталонный тактовый сигнал, путь прохождения сигнала между приемником 10е ГССМ для сигнала “импульс в секунду” и контроллером 10d должен быть как можно короче, чтобы ликвидировать любые задержки по этому пути прохождения сигнала. Принимая это во внимание, приемник 10е для сигнала “импульс в секунду” устанавливается внутри транспондера 10 автоматической системы опознавания.
Контроллер 10d принимает статическую и динамическую информацию, касающуюся своего собственного судна, и подает эту информацию на передатчик 10f МДВР для передачи другим судам. Статическая информация, касающаяся судна, заранее заносится в аппаратные средства контроллера 10d или хранится в нем энергонезависимым образом. В качестве альтернативы, член экипажа или кто-то другой также может занести такую информацию в конкретное время перед отправлением судна, используя секцию управления, связанную с дисплеем 20 автоматической системы опознавания. Секция управления может быть образована такими устройствами, как кнопки рядом с экраном дисплея, сенсорная панель на экране или связанная с ним клавиатура. Части динамической информации судна, относящиеся к текущему положению (широта и высота), скорости хода судна и т.д., могут быть получены от приемника 30 ГССМ местоопределения. Приемник 30 ГССМ местоопределения принимает сигнал от спутника ГССМ, используя антенну 30а ГССМ, и, основываясь на принятой информации, выполняет заданные операции по определению местоположения. Информация, касающаяся курса судна, которая входит в состав динамической информации, может быть получена от гирокомпаса 60. Различные датчики и устройства, включая те, которые не описаны здесь, могут быть использованы для сбора динамической информации. Если приемник 10е ГССМ для сигнала “импульс в секунду” действует в качестве приемника 30 ГССМ местоопределения, то может быть исключен внешний приемник ГССМ.
Контроллер 10d отображает на экране дисплея автоматической системы опознавания 20 элементы информации, соответствующие статической и динамической информации, касающейся других судов, принимаемой приемником 10g МДВР от других судов или т.п., предпочтительно отдельно со статической и динамической информацией, касающейся судна, на котором установлен транспондер 10 автоматической системы опознавания. В принципе, различные возможные виды отображения включают обозначение некоторым образом позиций других судов на экране в соответствии с двумерной системой координат; отображение около отмеченных позиций статической информации, такой как название судна, или динамической информации, такой как курс судна; построение пути следования других судов путем накопления и сопоставления ранее полученных частей динамической информации; наложение радиолокационного изображения, полученного от радиолокационного устройства (не показано); наложение электронной карты для системы отображения электронной карты и информации, извлекаемой из устройства хранения (не показано); отображение положения этого судна относительно других судов или взаимного расположения других судов, используя дополнительные линии связи, и т.д.
Были предложены другие виды отображения, такие как описанные, например, в заявке на патент Японии №2000-89902, поданной в Патентное ведомство Японии заявителем настоящей заявки. Необходимо заметить, что, хотя дисплеем 20 автоматической системы опознавания предпочтительно является специализированный дисплей, в принципе можно реализовать дисплей 20 автоматической системы опознавания путем преобразования других дисплеев или в комбинации с ними, включая дисплеи для радиолокационного устройства, системы отображения электронной карты и информации, прокладчика курса или т.п. Дисплей 20 автоматической системы опознавания также может отображать информацию, принимаемую приемником 10h цифрового селективного вызова или вспомогательным устройством 50 дальнего действия. Примерами вспомогательного устройства 50 дальнего действия являются устройства связи для стандарта ИНМАРСАТ-С, который представляет собой услугу, предусмотренную системой ИНМАРСАТ (Международная организация подвижной спутниковой связи), и другие устройства связи для услуги передачи данных/местоопределения, предлагаемой системой ОРБКОММ (Орбитал Коммьюникейшнз Корпорейшн (Orbital Communications Corp.)).
Проблема
Хотя выше было рассмотрено и проанализировано судовое оборудование для автоматической системы опознавания и были предложены многочисленные улучшения, проблемы остаются.
Во-первых, вышеописанное судовое оборудование использует кабели или т.п. для выполнения соединения между надпалубной аппаратурой и подпалубной аппаратурой. В зависимости от размеров и конструкции судна, на котором оборудование должно быть установлено, и от взаимного расположения надпалубной аппаратуры и подпалубной аппаратуры, длина кабеля может быть такой, что нельзя будет игнорировать потери на затухание. В частности, например, антенна ОВЧ обычно не имеет внутреннего усилителя радиочастоты (РЧ), и это приводит к первой проблеме затухания или ухудшения характеристик кабеля. Далее, так как в кабеле наводятся шумы, вторая проблема заключается в том, что появление шумов более вероятно тогда, когда кабель длинный (вторая проблема).
В вышеописанном судовом оборудовании для автоматической системы опознавания существует третья проблема, заключающаяся в том, что требуются многочисленные антенны и кабели и соответствующие затраты труда или рабочие по оснащению судна при внедрении судового оборудования для автоматической системы опознавания, что усложняет установку. В зависимости от относительного взаимного расположения соответствующих антенн могут возникнуть взаимные помехи или мертвые зоны в выходном сигнале при передаче/приеме каждой антенной, что составляет четвертую проблему.
Далее, в случае, когда устройства подпалубной аппаратуры, такие как транспондер автоматической системы опознавания и дисплей автоматической системы опознавания, переносятся с одного судна на другое судно, необходима работа, такая как разъединение кабельного соединения надпалубной аппаратуры с подпалубной аппаратурой на первом судне, транспортировка и установка снятой подпалубной аппаратуры на втором судне и соединение подпалубной аппаратуры с надпалубной аппаратурой, которая уже установлена на втором судне. Очень трудно придерживаться мобильного, эффективного и экономичного вида использования, такого как работа одной подпалубной аппаратуры с разделением во времени на нескольких судах, которые не совершают плавание одновременно, что составляет пятую проблему. Также, существует шестая проблема, заключающаяся в том, что существует возрастающая вероятность ошибки при подключении кабелей во время установки или переноса устройств подпалубной аппаратуры, так как обычно используются многочисленные кабели для соединения надпалубной аппаратуры и подпалубной аппаратуры.
В дополнение к проблемам на стороне надпалубной аппаратуры на стороне подпалубной аппаратуры также имеются проблемы. Во-первых, многочисленные устройства должны быть установлены для подпалубной аппаратуры, включая транспондер автоматической системы опознавания для обмена сообщениями, интерфейсное средство для экипажа, такое как дисплей автоматической системы опознавания, который представляет информацию экипажу или является средством ввода, используемым экипажем; устройство местоопределения, такое как приемник ГССМ, для сбора динамической информации, касающейся судна, и т.п. Далее, большое пространство необходимо для установки этих устройств, и кабельная проводка, связанная с этими устройствами, также требует большого пространства. При внедрении судового оборудования для автоматической системы опознавания на относительно небольшом судне, имеющим ограниченное внутреннее пространство, потребность в большом пространстве для устройств и кабелей представляет собой седьмую проблему. Восьмой проблемой является то, что утомительно прокладывать кабели для подключения соответствующих устройств подпалубной аппаратуры.
Можно исключить внешний приемник ГССМ путем использования внутреннего приемника ГССМ для сигнала “импульс в секунду”, содержащегося в транспондере автоматической системы опознавания, для местоопределения, особо получив подтверждение права доступа и разрешение от конкретной ответственной организации, посредством чего можно уменьшить пространство, занимаемое подпалубной аппаратурой и связанными с ней кабелями. Также можно, в принципе, интегрировать транспондер автоматической системы опознавания с дисплеем автоматической системы опознавания, образуя подпалубную аппаратуру, которая должна называться интегрированный транспондер/дисплей автоматической системы опознавания. Это уменьшает неудобство прокладывания кабелей для подпалубной аппаратуры. Однако такой интегрированный транспондер/дисплей автоматической системы опознавания приводит к устройству большого объема, вызывая девятую проблему, заключающуюся в затрудненной транспортировке и установке.
При многочисленных устройствах или больших устройствах существует десятая проблема в том, что трудно устанавливать оборудование автоматической системы опознавания на малом плавающем устройстве, таком как буй. При подключении к вспомогательному устройству дальнего действия или гирокомпасу необходимо также создать для каждого устройства интерфейс, чтобы корректировать различные технические требования. Это не только увеличивает и усложняет конструкцию, но также увеличивает трудность монтажа, создавая одиннадцатую проблему.
Сущность изобретения
Настоящее изобретение направлено на уменьшение потерь или ухудшения характеристик сигналов, передаваемых по кабелям; на улучшение антишумовых характеристик кабелей; на уменьшение количества этапов, затрат и пространства, необходимого для прокладки, переноса и монтажа кабелей, и случаев ошибочного монтажа; на предотвращение возникновения взаимных помех и мертвых зон между антеннами; и на реализацию уменьшения размеров, интеграции, более широкого диапазона оснащаемых судов и длительного использования оборудования.
Для решения вышеупомянутых задач настоящее изобретение основывается на новом основном понятии составления судового оборудования для автоматической системы опознавания. В частности, предложенное выше и разработанное судовое оборудование для автоматической системы опознавания составляется в соответствии с основным понятием построения и проектирования, при котором большая часть оборудования устанавливается как подпалубная аппаратура, и подпалубная аппаратура соединяется с надпалубной аппаратурой кабелями или т.п. Для того чтобы решить вышеуказанные проблемы, свойственные основному понятию построения, в настоящем изобретении решительно отошли от такого основного понятия построения, который представляет собой установившийся порядок, и, возможно, даже “здравый смысл”, для специалистов, кто практически использует данную область техники. Настоящее изобретение предлагает устройство, которое может быть “наружным блоком для автоматической системы опознавания” или “блоком надпалубной аппаратуры для автоматической системы опознавания” посредством объединения элементов, принадлежащих надпалубной аппаратуре в соответствии с конкретной конфигурацией. По существу или кроме того, блок надпалубной аппаратуры для автоматической системы опознавания согласно настоящему изобретению имеет свойства, описанные ниже.
Во-первых, блок надпалубной аппаратуры для автоматической системы опознавания в соответствии с настоящим изобретением используется в автоматической системе опознавания. Автоматическая система опознавания представляет собой систему для автоматического обмена сообщениями беспроводным методом о статической информации, такой как название судна, и о динамической информации, такой как текущее положение судна, между судами или судном и береговой станцией. Блок надпалубной аппаратуры для автоматической системы опознавания в соответствии с настоящим изобретением образует часть судового оборудования, которое должно быть установлено на судне. Блок надпалубной аппаратуры в соответствии с настоящим изобретением устанавливается снаружи на судне для осуществления связи с другими судами или береговой станцией. Установка снаружи здесь в основном относится к установке на участках судна, таких как палуба, подвергающихся воздействию окружающей среды, но также включает наполовину открытые пространства под укрытием или подволокой. Кроме того, блок надпалубной аппаратуры для автоматической системы опознавания в соответствии с настоящим изобретением обеспечивает информацию для передачи экипажу по проводному или беспроводному каналу передачи внутри судна к интерфейсному средству для экипажа. Интерфейсным средством для экипажа может быть стационарное или портативное устройство.
Надпалубный блок для автоматической системы опознавания в соответствии с настоящим изобретением содержит контейнер для размещения различных схем. Антенна, такая как антенна для обмена сообщениями, установлена на поверхности контейнера, которая представляет собой, например, антенну ОВЧ, используемую для передачи/приема сообщений. Схемы, размещенные в контейнере, включают в себя i) радиосхему для передачи/приема сообщений с использованием антенны для обмена сообщениями, и ii) контроллер для управления операциями передачи/приема, осуществляемыми радиосхемой. Контроллер служит, например, для подачи информации, включаемой в сообщение, передаваемое или предназначенное для других судов или береговой станции, на радиосхему и для подачи информации, включенной в сообщение, принятое радиосхемой от других судов или береговой станции, на интерфейсное средство для экипажа по каналу передачи внутри судна. Здесь сущность канала передачи внутри судна в значительной степени отличается от сущности при обычном представлении о разработке. В соответствии с обычными методами необходимо, чтобы радиосхема и контроллер размещались на стороне подпалубной аппаратуры. Как таковой канал передачи внутри судна обычно предусматривается для соединения между антенной и радиосхемой. В противоположность этому, в соответствии с настоящим изобретением, элементы, которые обычно входят в состав подпалубной аппаратуры, такие как радиосхема и контроллер, предусматриваются на стороне надпалубной аппаратуры. Поэтому, канал передачи внутри судна настоящего изобретения служит главным образом в качестве канала передачи между контроллером и интерфейсом для экипажа.
В результате переноса этой части устройств или схем, которые обычно входят в состав подпалубной аппаратуры, в надпалубную аппаратуру, в настоящем изобретении количество каналов передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой можно определять независимо от количества антенн. Другими словами, даже если предусмотрены многочисленные антенны, связанные с надпалубной аппаратурой, достаточно обеспечить только один канал передачи внутри судна, например кабель между надпалубной аппаратурой и подпалубной аппаратурой (решение третьей проблемы). Кроме того, даже если канал передачи внутри судна выполнен проводным кабелем, маловероятно, что произойдет ошибочное подключение или т.п. кабеля во время установки, переноса или т.п. судового оборудования, так как требуется только один кабель для канала передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой (решение шестой проблемы). Это также упрощает переход к мобильному, эффективному и экономичному виду использования (решение пятой проблемы).
В соответствии с настоящим изобретением схемы, содержащиеся на стороне надпалубной аппаратуры, размещаются в одном контейнере, и антенна, такая как антенна для обмена сообщениями, устанавливается на поверхности контейнера. При вышеописанном обычном размещении канал передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой служит в качестве канала передачи для соединения между антенной и радиосхемой. В настоящем изобретении такой канал передачи антенна-радиосхема соответствует каналу передачи для соединения поверхности и внутренней части контейнера. Поэтому, канал передачи между антенной и радиосхемой короткий и скрыт большей частью в контейнере, который минимизирует вероятность образования потерь или ухудшение качества сигнала и появление шума.
Сигнал, передаваемый между надпалубной аппаратурой и подпалубной аппаратурой настоящего изобретения, представляет собой обработанный сигнал, прошедший через радиосхему или контроллер, такой как цифровой сигнал или видеосигнал, несущий данные, а не сигнал обычно высокой частоты и малой мощности, такой как сигнал, передаваемый между антенной и радиосхемой. Это устраняет возникновение шума, потерь и ухудшение характеристик сигнала в канале передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой до уровня, который достаточно низкий, что его можно не учитывать или легко скорректировать (решение первой и второй проблемы).
В настоящем изобретении только интерфейсное средство для экипажа, такое как дисплей и устройство для вывода звукового сигнала, необходимо обеспечить для подпалубной аппаратуры. Необязательно создавать многочисленные устройства для подпалубной аппаратуры или соединения между такими устройствами. Это реализует преимущества, такие как уменьшение пространства, занимаемого подпалубной аппаратурой (и связанным с ней средством для соединения между подпалубной аппаратурой и надпалубной аппаратурой или между другими устройствами подпалубной аппаратуры), упрощение установки на относительно небольшое судно (решение седьмой проблемы) и устранение соединительных линий между соответствующими устройствами подпалубной аппаратуры (решение восьмой проблемы). Далее, не увеличиваются размеры самого интерфейсного средства для экипажа (решение девятой проблемы).
Контейнер содержит измерительное устройство для генерирования подлежащей передаче динамической информации, такое как приемник ГССМ, гирокомпас или гироскоп ГССМ, в дополнение к радиосхеме, например радиосхеме ОВЧ, и контроллер. Одним типом такого измерительного устройства, размещенного в контейнере, является устройство с радиоопределением, такое как приемник ГССМ или гирокомпас ГССМ, которое генерирует динамическую информацию, включающую в себя положение судна, основываясь на навигационном сигнале, принимаемом через радиоэфир. Так как устройство с радиоопределением размещено в контейнере, также предпочтительно установить антенну местоопределения, которая используется для приема навигационного сигнала, на поверхности контейнера. Хотя гирокомпас может быть использован для определения курса судна, иногда необходимо определить и проинтегрировать скорость движения по окружности носовой части, основываясь на выходном сигнале гирокомпаса. С гироскопом ГССМ достаточно объединить результаты местоопределения множества приемников ГССМ. Необходимо заметить, что гироскоп ГССМ представляет собой датчик, который определяет азимут или угол наклона объекта, например судна, на котором установлен гироскоп ГССМ, на основе сигнала от множества приемников ГССМ, которые стационарно расположены относительно друг друга.
Когда желательно перейти к конфигурации, в которой антенна для обмена сообщениями и антенна местоопределения установлены на поверхности контейнера, а радиосхема, контроллер, определитель места и т.п. размещены в контейнере, антенный комплекс предпочтительно выполняется путем объединения антенны для обмена сообщениями и антенны местоопределения. Одним решением этого является установка антенного комплекса, который состоит из плоской антенны и гибкой штыревой антенны. Плоская антенна, такая как микрополосковая антенна, может быть предусмотрена на внешней поверхности контейнера в качестве антенны местоопределения. Так как плоская антенна, используемая в ГССМ, например, чувствительна к воздействию погодных или морских условий или пыли, она обычно защищается проницаемым для радиоволн, неметаллическим обтекателем. Гибкая штыревая антенна может быть использована в качестве антенны для обмена сообщениями и состоит из стержнеобразного проводника, имеющего длину, равную примерно 1/4 длины волны, в качестве излучателя. Гибкая штыревая антенна устроена так, что один конец излучателя выходит наружу из обтекателя, и так, что излучатель смонтирован на обтекателе плоской антенны. С этой антенной конструкцией можно обеспечить многочисленные антенные функции путем эффективного использования контейнера, особенно ограниченной площади поверхности контейнера, тем самым дополнительно минимизируя блок надпалубной аппаратуры для автоматической системы опознавания.
Один пример такого антенного комплекса, пригодного для осуществления настоящего изобретения, описан в выложенной публикации патентной заявки Японии № Hei 10-247815 Кошио (Коshio) и Гото (Goto). В этой публикации описывается, что плоская антенна располагается относительно гибкой штыревой антенны таким образом, что плоскости поляризации обоих антенн расположены ортогонально друг другу, чтобы исключить любые взаимные помехи. Кабель, соединяющий гибкую штыревую антенну и радиосхему, также подсоединен к плоской антенне, так что плоская антенна и гибкая штыревая антенна совместно используют общий заземленный проводник. Таким образом можно в значительной степени устранить влияние присутствия плоской антенны на характеристики гибкой штыревой антенны, в то же самое время относительно легко корректируя и компенсируя влияние присутствия гибкой штыревой антенны на характеристики плоской антенны (решение четвертой проблемы).
В некоторых предпочтительных вариантах осуществления настоящего изобретения вышеописанная антенная конструкция используется с контейнером, по меньшей мере часть которого образована проводником. Заземленный проводник плоской антенны подсоединен к проводящей части контейнера для получения заземленного проводника для гибкой штыревой антенны, тем самым обеспечивая и увеличивая заземленную поверхность гибкой штыревой антенны. Кроме того, по меньшей мере одна другая часть контейнера образована проводником тепла, расположенным в соприкосновении с внутренней поверхностью контейнера или вблизи нее таким образом, что тепло, создаваемое нагревающим элементом (например радиосхемой, имеющей усилитель, который создает тепло во время своей работы), размещенным в контейнере, передается окружающему воздуху посредством контейнера. Это позволяет излучать тепло и производить естественное охлаждение вместо принудительного охлаждения, тем самым упрощая конструкцию и реализуя стабильную и высоконадежную работу схемы.
В некоторых предпочтительных вариантах осуществления настоящего изобретения гибкая штыревая антенна соединена с радиосхемой коаксиальным кабелем, причем коаксиальный разъем используется для реализации разъемного соединения. Это устройство повышает взаимозаменяемость гибкой штыревой антенны, что облегчает обслуживание и замену гибкой штыревой антенны и упрощает процессы новой установки и переноса блока надпалубной аппаратуры для автоматической системы опознавания. Коаксиальный разъем может быть закреплен, в первую очередь, в точке плоской антенны, где образовано сквозное отверстие, и, во вторую очередь, в точке обтекателя, где образовано другое сквозное отверстие. Посредством установки коаксиального разъема в той или другой точке, область, где образовано сквозное отверстие или в плоской антенне, или в обтекателе (в точке на нем, соответствующей части основания гибкой штыревой антенны), механически усиливается коаксиальным разъемом, придающим блоку повышенное сопротивление сильным вибрациям. Если коаксиальный разъем предусматривается в первой точке, внешний проводник коаксиального разъема может быть соединен с заземленным проводником плоской антенны для обеспечения и увеличения заземленной поверхности гибкой штыревой антенны.
Во второй точке коаксиальный разъем предпочтительно закрепляется, с тем чтобы водонепроницаемо герметизировать сквозное отверстие в обтекателе, реализуя простое водонепроницаемое устройство без резиновой прокладки или уплотнения. При установке коаксиального разъема во второй точке маловероятно, что коаксиальный разъем будет бросать тень на плоскую антенну, по сравнению с коаксиальным разъемом в первой точке, и очень маловероятно, что коаксиальный разъем будет препятствовать обнаружению и сопровождению спутника плоской антенной. Кроме того, если коаксиальный разъем установлен в первой точке, внутренний диаметр сквозного отверстия, которое должно быть образовано в плоской антенне, должно быть определено в соответствии с внешним диаметром коаксиального разъема, который принудительно увеличивает внутренний диаметр сквозного отверстия. При установке коаксиального разъема во второй точке внутренний диаметр сквозного отверстия может быть сделан меньше, так как он может быть определен на основе внешнего диаметра коаксиального кабеля. Малый внутренний диаметр сквозного отверстия может увеличить свободу действия при проектировании плоской антенны, что способствует расширению полосы частот, доступной для плоской антенны.
В качестве альтернативного варианта, в других предпочтительных вариантах осуществления настоящего изобретения гибкая штыревая антенна соединена с радиосхемой коаксиальным кабелем без использования коаксиального разъема, для того чтобы не бросать тень на плоскую антенну. Для реализации этого устройства проводники как плоской антенны, так и гибкой штыревой антенны расположены так, что заземленный проводник плоской антенны служит в качестве заземленного проводника гибкой штыревой антенны, как описано выше. При подключении коаксиального кабеля, отходящего от радиосхемы, внешний проводник коаксиального кабеля от радиосхемы соединяется с заземленным проводником плоской антенны, а внутренний проводник коаксиального кабеля соединяется с излучателем гибкой штыревой антенны. Это не только устраняет коаксиальный разъем, но также обеспечивает заземленную поверхность гибкой штыревой антенны, уменьшает внутренний диаметр отверстия в плоской антенне и т.п.
Примеры этого типа устройств включают в себя первое устройство, в котором внешний проводник коаксиального кабеля частично удален на заданную длину от штыревого конца коаксиального кабеля, и штыревой конец внутреннего проводника коаксиального кабеля, в котором удален внешний проводник, соединен с одним концом излучателя гибкой штыревой антенны. В качестве альтернативного варианта, во втором устройстве излучатель гибкой штыревой антенны или любой проводник, соединенный с ним, выступает внутрь контейнера через сквозное отверстие в плоской антенне, и внутренний проводник коаксиального кабеля соединен, непосредственно или опосредовано, с излучателем гибкой штыревой антенны. В таких устройствах внутренний проводник коаксиального кабеля частично служит в качестве излучателя, продолжающегося от излучателя гибкой штыревой антенны. Внутренний диаметр сквозного отверстия плоской антенны оптимально может быть уменьшен до размера внешнего диаметра коаксиального кабеля (когда коаксиальный кабель проходит через отверстие) или до размера внешнего диаметра внутреннего проводника коаксиального кабеля (когда часть коаксиального кабеля, на которую удален внешний проводник, проходит через отверстие). Это расширяет свободу действий при проектировании плоской антенны.
В частности, внутренний проводник коаксиального кабеля присутствует только внутри контейнера во втором устройстве, если смотреть со стороны плоской антенны, так что упрощается замена плоской антенны. В первом устройстве, так как соединение между коаксиальным кабелем и гибкой штыревой антенной находится снаружи контейнера, если смотреть со стороны плоской антенны, то соединение осуществляется необратимым соединительным средством, таким как пайка. В качестве альтернативы, внутренний проводник коаксиального кабеля может быть подсоединен к излучателю гибкой штыревой антенны посредством съемного разъема за счет отбрасывания тени на плоскую антенну. В противоположность этому, соединение во втором устройстве выполняется посредством размещения разъема для непосредственного или опосредованного соединения между коаксиальным кабелем и гибкой штыревой антенной внутри контейнера, если смотреть со стороны плоской антенны. Поэтому, пайка необязательна, и разъемное соединение может быть реализовано без отбрасывания тени на плоскую антенну. В первом устройстве часть внутреннего проводника открыта около штыревого конца коаксиального кабеля и используется по существу как часть гибкой штыревой антенны. Эта часть внутреннего проводника механически ломкая и с большей вероятностью может быть оборвана, чем другие части внутреннего проводника. Во втором устройстве нет такой ломкой части, что делает маловероятным любое отсоединение внутреннего проводника, приводящее к нарушению нормальной работы гибкой штыревой антенны.
При выполнении блока надпалубной аппаратуры для автоматической системы опознавания в соответствии с настоящим изобретением можно включить функцию беспроводной связи для различных вспомогательных устройств дальнего действия, таких как устройства, связанные с ИНМАРСАТ-С или ОРБКОММ, в контейнер, который размещается снаружи, в дополнение к функции обмена сообщениями, например ОВЧ, и функции местоопределения ГССМ, гироскопов, гироскопа ГССМ или т.п. В частности, антенна дальнего действия, используемая для беспроводной связи со вспомогательными сигналами дальнего действия, установлена на поверхности контейнера, в котором размещены радиосхема, контроллер и т.п., в то время как вспомогательное устройство дальнего действия для связи со вспомогательными сигналами дальнего действия, используя антенну дальнего действия, установлено внутри контейнера. Необходимо заметить, что в контейнере установлена часть вспомогательного устройства дальнего действия, главным образом относящаяся к беспроводной связи, а та другая часть устройства, относящаяся главным образом к интерфейсу для экипажа, образована вышеописанным интерфейсным средством для экипажа или выполнена как отдельное интерфейсное средство, связанное с ним. Контроллер позволяет передавать вспомогательным устройством дальнего действия некоторые части информации, подаваемые от интерфейсного средства для экипажа по каналу передачи внутри судна в виде вспомогательного сигнала дальнего действия, в то же самое время подавая вспомогательный сигнал дальнего действия, принимаемый вспомогательным устройством дальнего действия, на интерфейс для экипажа по каналу передачи внутри судна.
Как описано выше в отношении фиг.14, если транспондер автоматической системы опознавания вновь устанавливается на некотором судне и желательно подсоединить транспондер автоматической системы опознавания к существующему или любому одновременно устанавливаемому вспомогательному устройству дальнего действия, также должно быть установлено устройство для сопряжения этих устройств. В противоположность этому, если по меньшей мере часть вспомогательного устройства дальнего действия, главным образом относящаяся к передаче сигналов, уже встроена в контейнер наружного оборудования, как описано выше, то необходимо только подсоединить схемы и элементы в контейнере к интерфейсному средству для экипажа, такому как персональный компьютер общего назначения. Другими словами, нет необходимости вводить интерфейсное средство между транспондером и устройством дальнего действия, и монтаж может быть упрощен (решение одиннадцатой проблемы). Если транспондер автоматической системы опознавания вновь устанавливается на судне, не имеющем вспомогательного устройства дальнего действия, также можно ввести вспомогательную функцию дальнего действия с малыми затратами посредством введения системы, использующей блок надпалубной аппаратуры в соответствии с одним вариантом осуществления настоящего изобретения.
Для того чтобы повысить транспортабельность блока надпалубной аппаратуры для автоматической системы опознавания, может быть предпочтительным предусмотреть разъем для подключения, с возможностью отключения, элементов, размещенных в контейнере, к каналу передачи внутри судна. Разъем, или любой разъем, предусмотренный отдельно для источника питания, также может быть использован для подачи питания от внешнего источника питания на элементы, размещенные в контейнере. Транспортабельность может быть дополнительно повышена, если предусмотреть гальванический элемент или любое генераторное средство, которое вырабатывает энергию в результате операций отдачи или генерирования, внутри контейнера или на его поверхности.
Блок надпалубной аппаратуры для автоматической системы опознавания в соответствии с настоящим изобретением, вместе с вышеупомянутым интерфейсным средством для экипажа и проводным или беспроводным каналом передачи внутри судна, образуют часть судового оборудования для автоматической системы опознавания. Судовое оборудование для автоматической системы опознавания соответствует той части автоматической системы опознавания, особенно бортовая часть автоматической системы опознавания, которая представляет собой систему, способствующую плаванию судов путем обмена сообщениями, касающимися названий, местоположения и т.д. других судов, принимаемыми от них или от береговой станции, и передаваемыми на каждое судно. Поэтому предполагается, что настоящее изобретение используется главным образом на судах, но настоящее изобретение не ограничивается этим применением. Например, настоящее изобретение может быть осуществлено в виде дополнительного устройства на плаву для автоматической системы опознавания, такого как блок, установленный на буе, который установлен на конструкции на плаву, расположенной стационарно в некотором водном пространстве, или на плавающей конструкции. Дополнительный блок на плаву для автоматической системы опознавания предусмотрен с антенной для обмена сообщениями на поверхности контейнера для беспроводного обмена сообщениями. В контейнере размещены радиосхема для автоматического приема сообщений с судов и береговой станции и передачи сообщений на них, используя антенну для обмена сообщениями, и контроллер для управления работой радиосхемы по приему/передаче и подачи в радиосхему информации, подлежащей передаче на суда или береговую станцию. Таким образом, дополнительный блок на плаву для автоматической системы опознавания может передавать статическую или динамическую информацию, такую как текущее положение блока, относительно конструкции на плаву или плавающей конструкции, на которой блок установлен. Так как блок имеет компактную конструкцию, в которой одна или несколько схем и антенн встроены в один контейнер, блок легче можно установить, например, на буе, чем те устройства, показанные на фиг.13 и 14 (решение десятой проблемы).
Краткое описание чертежей
На фиг.1 представлена блок-схема, изображающая устройство судового оборудования для автоматической системы опознавания, особенно классификацию соответствующих устройств подпалубной аппаратуры и надпалубной аппаратуры и соединение между ними, в соответствии с первым вариантом осуществления настоящего изобретения.
На фиг.2 представлен схематический вид в разрезе, изображающий устройство блока надпалубной аппаратуры для автоматической системы опознавания, особенно устройство соответствующих элементов в контейнере и место, в котором антенна размещена на поверхности контейнера, в соответствии с первым вариантом осуществления настоящего изобретения.
На фиг.3 представлен схематический вид в разрезе, изображающий антенную конструкцию в соответствии с первым вариантом осуществления настоящего изобретения.
На фиг.4 представлен схематический вид в разрезе, изображающий антенную конструкцию в соответствии со вторым вариантом осуществления настоящего изобретения.
На фиг.5 представлен вид сверху плоской антенны в соответствии со вторым вариантом осуществления настоящего изобретения.
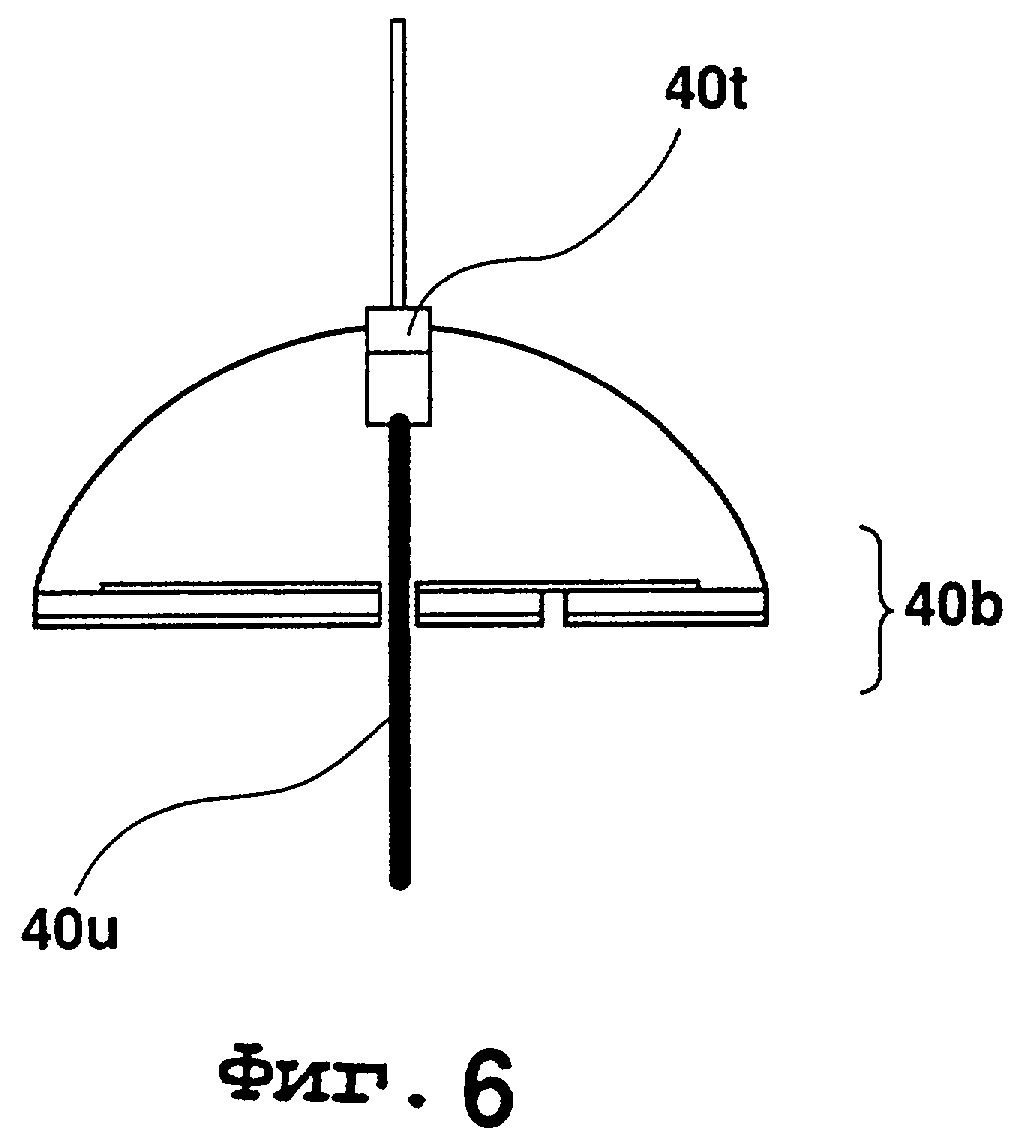
На фиг.6 представлен схематический вид в разрезе, изображающий антенную конструкцию в соответствии с третьим вариантом осуществления настоящего изобретения.
На фиг.7 представлен вид сверху плоской антенны в соответствии с третьим вариантом осуществления настоящего изобретения.
На фиг.8 представлен схематический вид в разрезе, изображающий антенную конструкцию в соответствии с четвертым вариантом осуществления настоящего изобретения.
На фиг.9 представлен вид сверху плоской антенны в соответствии с четвертым вариантом осуществления настоящего изобретения.
На фиг.10 представлен схематический вид в разрезе, изображающий антенную конструкцию в соответствии с пятым вариантом осуществления настоящего изобретения.
На фиг.11 представлен вид сверху плоской антенны в соответствии с пятым вариантом осуществления настоящего изобретения.
На фиг.12 представлена блок-схема устройства судового оборудования для автоматической системы опознавания, особенно классификация соответствующих устройств надпалубной аппаратуры и подпалубной аппаратуры и соединение между ними, в соответствии с шестым вариантом осуществления настоящего изобретения.
На фиг.13 представлена блок-схема, изображающая обычное устройство судового оборудования для автоматической системы опознавания, особенно классификацию соответствующих устройств надпалубной аппаратуры и подпалубной аппаратуры и соединение между ними.
На фиг.14 представлена блок-схема, изображающая другое обычное устройство судового оборудования, особенно классификацию соответствующих устройств надпалубной аппаратуры и подпалубной аппаратуры и соединение между ними.
На фиг.15 представлена блок-схема, изображающая внутреннюю конструкцию обычного транспондера автоматической системы опознавания.
Описание предпочтительных вариантов осуществления
Настоящее изобретение ниже описывается на основе его предпочтительных вариантов осуществления со ссылкой на прилагаемые чертежи.
(1) Первый вариант осуществления
На фиг.1-3 изображено устройство судового оборудования для автоматической системы опознавания в соответствии с первым вариантом осуществления настоящего изобретения. Оборудование, в соответствии с настоящим изобретением, включает блок 40 надпалубной аппаратуры для автоматической системы опознавания и дисплей 20 автоматической системы опознавания, которые соединены проводным или беспроводным каналом передачи внутри судна.
Как описано выше, судовое оборудование для автоматической системы опознавания предусматривает интерфейсное средство для экипажа, чтобы представлять информацию экипажу судна, на котором установлено оборудование, путем визуального отображения информации или вывода звукового сигнала, и иметь возможность ввода статической информации, касающейся судна. Дисплей 20 автоматической системы опознавания является одним видом такого интерфейсного средства и включает в себя дисплей, такой как дисплей на ЭЛТ или ЖКД, и средство управления, такое как кнопки, переключатели, наборный диск, сенсорная панель, клавиатура, указательное устройство и т.д., которые не показаны.
Как описано ниже, различные функции, выполняемые стороной подпалубной аппаратуры в устройствах, показанных на фиг.13-15, такие как функции беспроводной связи, измерения и местоопределения и обработки сигнала, предоставляются блоком 40 надпалубной аппаратуры для автоматической системы опознавания, которые принадлежат в этом случае к стороне надпалубной аппаратуры. Поэтому относительно недорогое и небольшое устройство универсального типа может быть использовано в качестве дисплея 20 автоматической системы опознавания. Например, дисплей 20 автоматической системы опознавания может быть реализован различными персональными компьютерами общего назначения (ПК), включая настольные, блокнотные и карманные компьютеры, или персональные цифровые секретари. Дисплей 20 автоматической системы опознавания может быть размещен стационарно в жилой зоне или на рабочем месте экипажа, или он может транспортироваться или переноситься экипажем. Нет необходимости создавать многочисленные устройства в виде подпалубной аппаратуры или соединять такие устройства. Это уменьшает пространство, занимаемое подпалубной аппаратурой, необходимое для размещения судового оборудования для автоматической системы опознавания, что дополнительно упрощает внедрение оборудования на относительно малых судах. Это также предотвращает нарушение нормальной работы, вызванное ошибочным монтажом, так как исключается монтаж для соединения соответствующих устройств подпалубной аппаратуры.
Канал передачи внутри судна (обозначенный соединительной линией 40k на фиг.2) для соединения дисплея 20 автоматической системы опознавания с блоком 40 надпалубной аппаратуры для автоматической системы опознавания передает информацию, такую как часть статической информации, касающейся судна, введенной экипажем в результате работы дисплея 20 автоматической системы опознавания, или уже хранимой и установленной в дисплее 20 автоматической системы опознавания, в блок 40 надпалубной аппаратуры для автоматической системы опознавания со стороны дисплея 20 автоматической системы опознавания. Канал передачи внутри судна также передает необходимую информацию или сигналы, требуемые, например, для отображения на экране дисплея 20 автоматической системы опознавания, от блока 40 надпалубной аппаратуры для автоматической системы опознавания к дисплею 20 автоматической системы опознавания. Для того чтобы реализовать дисплей 20 автоматической системы опознавания путем использования ПК общего назначения или т.п., проводной или беспроводной канал передачи внутри судна между блоком 40 надпалубной аппаратуры для автоматической системы опознавания и дисплеем 20 автоматической системы опознавания предпочтительно соответствует конкретному стандарту и спецификации, совместимой с ПК. Если требуется создание проводного канала, может быть использован либо закрепленный, либо незакрепленный кабель, в соответствии с типом и размерами судна, на котором кабель прокладывается (например доступность пространства для прокладки кабеля), типом дисплея 20 автоматической системы опознавания (например стационарный или портативный), и предназначенным использованием судового оборудования (например возможность и частота переноса оборудования).
В отличие от канала передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой оборудования, показанного на фиг.13-15, нет необходимости использовать множество (или пучок) антенных кабелей в качестве канала передачи внутри судна для передачи сигналов, на радиочастоте, между блоком 40 надпалубной аппаратуры для автоматической системы опознавания и дисплеем 20 автоматической системы опознавания. Например, может быть использован кабель для передачи группового сигнала последовательно или параллельно или беспроводная связь посредством так называемой радиосвязи с очень малой мощностью. Может быть исключена проводная передача радиочастотных сигналов, так как радиосхема 40е и контроллер 40f предусмотрены на стороне надпалубной аппаратуры, которая будет описана ниже, так что канал передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой служит для соединения контроллера и интерфейсного средства, а не антенн и радиосхемы. По этой же самой причине необходимо предусмотреть только один канал передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой независимо от количества антенн. Поэтому, даже если используется закрепленный кабель для канала передачи внутри судна, можно снизить затраты и рабочий труд по прокладке кабелей, в то же самое время уменьшая вероятность, например, ошибочного подсоединения кабеля во время установки или переноса судового оборудования.
С таким упрощенным каналом передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой, а также с упрощением подпалубной аппаратуры (то есть, уменьшением количества устройств в подпалубной аппаратуре и исключением соединений между такими устройствами в подпалубной аппаратуре), как описано выше, дополнительно повышается транспортабельность судового оборудования. Конкретно, с конфигурацией, соответствующей настоящему варианту осуществления, упрощается эффективное и экономичное использование оборудования на многочисленных судах. Например, судовое оборудование, особенно блок надпалубной аппаратуры для автоматической системы опознавания, может быть перенесено кем-либо или передано с судна, у которого по графику не запланировано плавание, на другое судно. Если оборудование настоящего варианта осуществления устанавливается на судне, на котором кабель или т.п. уже проложен для соединения между приемником ГССМ и антенной ГССМ, существующий кабель может быть использован для обеспечения канала передачи внутри судна между блоком 40 надпалубной аппаратуры для автоматической системы опознавания и дисплеем 20 автоматической системы опознавания, так что для прокладки кабелей не нужны затраты и рабочая сила.
В дополнение к уменьшенному количеству каналов снижаются потери и шумы, так как канал передачи между надпалубной аппаратурой и подпалубной аппаратурой может передавать относительно низкочастотный сигнал, который мало подвержен действию шумов. Конкретно, сигналом, проходящим по каналу передачи, может быть обработанный сигнал, прошедший через радиосхему 40е ОВЧ или контроллер 40f, вместо необработанного слабого радиочастотного сигнала, получаемого с выхода антенны. Таким образом, опасность появления потерь или ухудшения характеристик сигнала или возникновения шумов в канале передачи внутри судна между блоком 40 надпалубной аппаратуры для автоматической системы опознавания и дисплеем 20 автоматической системы опознавания может быть доведена до достаточно низкого уровня, что ее можно не учитывать или легко скомпенсировать.
Судовое оборудование для автоматической системы опознавания также имеет функцию приема сообщений о статической и динамической информации, касающейся других судов, от этих судов или береговой станции и функцию передачи сообщений о статической и динамической информации, касающейся судна, на котором установлено оборудование. Среди элементов информации, подлежащей передаче другим судам или т. п., динамическая информация, касающаяся судна, должна быть определена и введена некоторым средством. Блок 40 надпалубной аппаратуры для автоматической системы опознавания настоящего изобретения характеризуется тем, что содержит единственный контейнер 40а, в котором различные схемы и устройства, относящиеся к вышеупомянутым функциям, то есть, беспроводной связи и управлению сообщением, и измерения, и местоопределения, для сбора динамической информации, касающейся судна. Во-вторых, блок характеризуется тем, что он размещается над судном, чтобы передавать на другие суда и принимать с них радиосигналы и чтобы принимать сигнал от навигационного спутника. В-третьих, в результате применения антенного комплекса с интегрированным с ним контейнером блок может подавлять взаимные помехи между антеннами, шум и т.п. и имеет соответствующие характеристики теплового излучения (которые подробно описаны ниже). Необходимо заметить, что, хотя здесь не показана бортовая конструкция для размещения блока снаружи, могут быть применены различные конструкции, такие как поддерживающие блок специальной опорой или основанием, закрепляющие блок посредством добавления поддерживающих элементов к существующей конструкции, привязывающие блок к существующей конструкции или подвешивающие к ней, такой как поручень и т.п. Применяемая конструкция может быть определена в соответствии с размерами судна, частотой переноса и т.д.
Как показано на фиг.2, блок 40 надпалубной аппаратуры для автоматической системы опознавания включает в себя большинство устройств, показанных на фиг.15, внутри единственного контейнера 40а или на его поверхности.
Среди устройств, размещенных в контейнере 40а, радиосхема 40е ОВЧ соответствует радиосхеме 10с ОВЧ, контроллер 40f соответствует контроллеру 10d, а приемник 40g ГССМ соответствует приемнику 10е ГССМ для сигнала “импульс в секунду” и приемнику 30 ГССМ местоопределения на фиг.15. Приемник 40g ГССМ не только генерирует сигнал “импульс в секунду”, но также измеряет текущее положение, скорость плавания и т.п. судна. Контроллер 40f подает на радиосхему 40е ОВЧ результат местоопределения (например, положение судна) от приемника 40g ГССМ и сигнал, содержащий информацию, переданную со стороны дисплея 20 автоматической системы опознавания по соединительной линии 40k. Контроллер 40f затем вызывает беспроводную передачу радиосхемой 40е ОВЧ синхронно с сигналом “импульс в секунду” от приемника 40g ГССМ для обработки принимаемой информации, и подачу обработанной информации на дисплей 20 автоматической системы опознавания по соединительной линии 40k.
На фиг.15 не показано какое-либо устройство, соответствующее источнику 40h питания. В настоящем варианте осуществления источник 40h питания подает питание на устройства внутри контейнера 40а и на его поверхности. Например, источник 40h питания преобразует, выпрямляет и регулирует энергию, подаваемую извне по соединительной линии 40k. В качестве альтернативы, источником 40h питания может быть первичный или вторичный источник тока, или солнечный элемент или т.п. может быть размещен на поверхности контейнера 40а для образования источника 40h питания или его одного блока.
На поверхности контейнера 40а предусмотрены гибкая штыревая антенна 40с ОВЧ, используемая для обмена сообщениями для радиосхемы 40е ОВЧ, и микрополосковая антенна 40b ГССМ, используемая для приема навигационного сигнала (или навигационного сообщения) приемником 40g ГССМ, а также разъем (не показан) для подключения соединительной линии 40k к контроллеру 40f и источнику 40h питания. Радиосхема 40е ОВЧ принимает и передает сообщения, используя гибкую штыревую антенну 40с ОВЧ. Приемник 40g ГССМ генерирует динамическую информацию, включающую в себя положение судна на основе навигационного сигнала, принимаемого посредством использования микрополосковой антенны 40b ГССМ. Гибкая штыревая антенна 40с ОВЧ подсоединена к радиосхеме 40е ОВЧ через соединительную линию 40i, a микрополосковая антенна 40b ГССМ подсоединена к приемнику 40g ГССМ через соединительную линию 40j соответственно. Соединительными линиями 40i и 40j предпочтительно являются гибкие или жесткие коаксиальные кабели. В частности, необходимо заметить, что длина соединительных линий 40i и 40j соответственно значительно короче, чем длина соединительной линии антенны, показанной на фиг.13-15, и что эти линии экранированы от контейнера 40а (если контейнер 40а выполнен из проводника).
Гибкая штыревая антенна 40с ОВЧ и микрополосковая антенна 40b ГССМ выполнены в виде антенного комплекса, такого как показанный на фиг.3.
Микрополосковая антенна 40b ГССМ имеет круглую или прямоугольную диэлектрическую подложку 40m (круглая подложка показана на чертежах). Проводник 40n основания, служащий в качестве заземленного проводника, предусмотрен на одной стороне диэлектрической подложки 40m, в то время как круглый элемент 40р микрополосковой антенны, служащий в качестве излучателя, расположен на другой стороне подложки. Хотя различные части и схемы, связанные с элементом 40р микрополосковой антенны, не показаны на изображенном примере, специалисты в данной области техники легко могут определить устройство таких частей и схем со ссылкой на описание настоящего изобретения. Элемент 40р микрополосковой антенны получает питание от приемника 40g ГССМ по соединительной линии 40j через коаксиальную питающую секцию 40 г со стороны проводника 40n основания на заданном расстоянии от центра элемента 40р микрополосковой антенны. Кроме того, сквозное отверстие образовано в центре микрополосковой антенны 40b ГССМ, а внутренняя сторона сквозного отверстия закрыта проводником, который электрически соединен с проводником 40n основания и элементом 40р, посредством чего образуется короткозамкнутый штырь элемента 40р микрополосковой антенны.
Излучатель или стержнеобразный проводник гибкой штыревой антенны 40с ОВЧ проходит через обтекатель 40d и центр элемента микрополосковой антенны 40b ГССМ, в которой обтекатель 40d представляет собой колпак, способный пропускать радиоволны, для защиты микрополосковой антенны 40b ГССМ от погодных условий, пыли и морских условий. Таким образом, излучатель выходит из-под микрополосковой антенны 40b и продолжается над обтекателем 40d на фиг.3. И снова, хотя различные части и схемы, связанные с гибкой штыревой антенной 40с ОВЧ не показаны на чертеже, специалисты в данной области техники могут легко определить устройство таких частей и схем со ссылкой на настоящую заявку. Сквозное отверстие, образованное в обтекателе 40d, водонепроницаемо герметизируется водонепроницаемым уплотнением 40s, образованным резиной или т.п., для предотвращения проникновения дождя, морской воды и т.д.
Как описано выше, сквозное отверстие, образованное в центре микрополосковой антенны 40b ГССМ, закрывается проводником, и он проходит далее вниз во внутреннюю часть контейнера 40а. Хотя и не показана, но применяется некоторая поддерживающая конструкция для сохранения заданного расстояния между излучателем гибкой штыревой антенны 40с ОВЧ и проводником, закрывающим внутреннюю часть сквозного отверстия микрополосковой антенны 40b ГССМ. Это обеспечивает коаксиальную конструкцию у сквозного отверстия и непосредственно под ним, которое образовано в центре элемента микрополосковой антенны 40b ГССМ, в которой излучатель гибкой штыревой антенны 40с ОВЧ служит в качестве внутреннего проводника, и проводник, электрически соединяющийся с проводником 40n основания, служит в качестве внешнего проводника. Длина излучателя гибкой штыревой антенны 40с ОВЧ устанавливается такой, чтобы вышеупомянутая коаксиальная конструкция, то есть часть над коаксиальной питающей секцией 40q, примерно равнялась 1/4 длины волны, используемой для связи. Коаксиальная питающая секция 40q соединена с соединительной линией 40i, которая не показана. В этом варианте осуществления, так как внешний проводник или проводник основания коаксиальной питающей секции 40q электрически соединен с проводником 40n основания, обеспечивается то, что поверхность заземления гибкой штыревой антенны 40с ОВЧ распространяется по всему проводнику 40n основания. Поверхность заземления гибкой штыревой антенны 40с ОВЧ далее может быть расширена в результате выполнения по меньшей мере части контейнера 40а проводящей, и прикрепления микрополосковой антенны 40b ГССМ к контейнеру 40а, так что проводник 40n основания электрически соединен с проводящей частью контейнера 40а.
В вышеописанном антенном комплексе плоскость поляризации гибкой штыревой антенны 40с ОВЧ и плоскость поляризации микрополосковой антенны 40с ГССМ примерно ортогональны друг другу, что предотвращает взаимные помехи между антеннами. Так как проводник 40n основания микрополосковой антенны 40b ГССМ служит в качестве заземленного проводника гибкой штыревой антенны 40с, можно по существу устранить влияние микрополосковой антенны 40b ГССМ на характеристики гибкой штыревой антенны 40с ОВЧ, в то же самое время относительно легко корректируя и компенсируя влияние гибкой штыревой антенны 40с ОВЧ на характеристики микрополосковой антенны 40b ГССМ. В отношении этих вопросов ссылка делается на выложенную публикацию патентной заявки Японии № Hei 10-247815.
Конфигурация этого варианта осуществления преимущественно уменьшает размеры блока 40 надпалубной аппаратуры для автоматической системы опознавания, площадь поверхности контейнера 40а в результате применения вышеописанного антенного комплекса, хотя предусмотрены многочисленные антенны. Если контейнер 40а выполнен из металла, например, можно увеличить поверхность заземления гибкой штыревой антенны 40с ОВЧ, как описано выше, и также использовать такую увеличенную площадь поверхности, чтобы способствовать отводу тепла и охлаждению элементов внутри контейнера 40а. Конкретно, так как металлы передают тепло и блок 40 надпалубной аппаратуры для автоматической системы опознавания установлен над палубами, тепло, вырабатываемое внутри блока надпалубной аппаратуры, может быть отведено естественным охлаждением поверхности контейнера 40а. В этом варианте осуществления создающие тепло устройства, размещенные в контейнере 40а, такие как радиосхема 40е ОВЧ, имеющая усилитель, и источник 40h питания, имеющий переключающий компонент, расположены в соприкосновении с внутренней поверхностью контейнера 40а или в непосредственной близости от нее (см. устройство соответствующих элементов, показанных на фиг.2), таким образом позволяя производить естественный теплоотвод в атмосферу. Таким образом, операция отвода тепла и охлаждения проводится с использованием естественного воздуха, вместо принудительного движения воздуха, тем самым упрощая конструкцию устройства и реализуя более стабильную и надежную работу схемы.
Также, канал передачи между гибкой штыревой антенной 40с ОВЧ и радиосхемой 40е ОВЧ этого варианта осуществления значительно короче, чем канал передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой в примерах, показанных на фиг.13-15. Канал передачи этого варианта осуществления также размещен в контейнере 40а, выполненном из металла или т.п. Это дополнительно уменьшает опасность потерь и ухудшения характеристик сигнала и минимизирует наводку внешних помех в контейнере 40а.
(2) Второй и третий варианты осуществления
На фиг.4 и 5 изображен второй вариант осуществления, а на фиг.6 и 7 третий вариант осуществления антенного комплекса в соответствии с настоящим изобретением. В этом случае элементы, аналогичные или идентичные элементам первого варианта осуществления, повторно не описываются и не показаны на чертежах их позиции для этих составляющих. Коаксиальная питающая секция 40r также не показана на этих чертежах.
Как во втором, так и в третьем варианте осуществления, соединительная линия 40i образована коаксиальным кабелем 40u, который подсоединен к гибкой штыревой антенне 40с ОВЧ с использованием коаксиального разъема 40t. Таким образом, коаксиальный кабель 40u и гибкая штыревая антенна 40с ОВЧ соединены друг с другом с возможностью разъединения, позволяя временно снимать гибкую штыревую антенну 40с ОВЧ во время, например, замены или переноса антенны, простым снятием коаксиального разъема 40t. Поэтому, антенные конструкции в соответствии со вторым и третьим вариантами осуществления настоящего изобретения упрощают техническое обслуживание и повышают транспортабельность по сравнению с конструкцией первого варианта осуществления. Кроме того, в результате закрепления коаксиального разъема 40t в сквозном отверстии микрополосковой антенны 40b ГССМ (второй вариант осуществления) или обтекателя 40d (третий вариант осуществления), нижняя часть излучателя гибкой штыревой антенны 40с ОВЧ механически усиливается, что повышает антивибрационные характеристики по сравнению с теми, которые были получены с конфигурацией в соответствии с первым вариантом осуществления. Хотя в первом варианте осуществления требуется поддерживающее средство для сохранения расстояния между внутренним и внешним проводниками в коаксиальной питающей секции 40q, такое средство не нужно во втором и третьем вариантах осуществления вследствие использования коаксиального кабеля 40u.
Конфигурации второго и третьего варианта осуществления имеют соответствующие преимущества и недостатки. Во втором варианте осуществления коаксиальный разъем 40t закреплен в сквозном отверстии микрополосковой антенны 40b ГССМ, так что коаксиальный разъем 40t вероятно отбрасывает тень на элемент 40р микрополосковой антенны. А именно, коаксиальный разъем 40t перекрывает сигнал от спутника местоопределения, что может препятствовать приему или обнаружению сигнала микрополосковой антенной 40b ГССМ. В третьем варианте осуществления коаксиальный разъем 40t размещается вдали от элемента 40р микрополосковой антенны, что уменьшает опасность отбрасывания тени коаксиального разъема 40t на элемент 40р микрополосковой антенны по сравнению со вторым вариантом осуществления.
Во втором варианте осуществления требуется водонепроницаемое уплотнение 40s, как и в первом варианте осуществления. В противоположность этому коаксиальный разъем 40t служит для герметизации сквозного отверстия в обтекателе 40d водонепроницаемым образом в третьем варианте осуществления, при этом это преимущество только уменьшает количество необходимых компонентов посредством исключения водонепроницаемого уплотнения 40s и исключает необходимость замены уплотнения, когда резина разрушается вследствие старения.
Однако в то время как второй вариант осуществления может обеспечивать и увеличивать поверхность заземления у гибкой штыревой антенны 40с посредством обеспечения внешним проводником коаксиального кабеля 40u и, следовательно, коаксиальным разъемом 40t электрического соединения с проводником 40n основания, такое соединение и подключение затруднительно в третьем варианте осуществления.
Во втором варианте осуществления необходимо согласовать внутренний диаметр сквозного отверстия микрополосковой антенны 40b ГССМ с внешним диаметром коаксиального разъема 40t из-за необходимости закрепления коаксиального разъема 40t. В третьем варианте осуществления используется только небольшое сквозное отверстие 40w в микрополосковой антенне 40b ГССМ, по сравнению со вторым вариантом осуществления, так как тонкий коаксиальный кабель 40u вводится через сквозное отверстие в микрополосковой антенне 40b ГССМ. Так как сквозное отверстие 40w небольшое, микрополосковая антенна 40b ГССМ реализует более широкий частотный диапазон, что повышает свободу действий при проектировании.
Во втором варианте осуществления, чтобы предотвратить электрическое соединение между проводником на внутренней поверхности сквозного отверстия и проводником, незащищенным на поверхности коаксиального разъема 40t, должен быть предусмотрен изолятор 40v на проводнике сквозного отверстия микрополосковой антенны 40b ГССМ. Третьему варианту осуществления не требуется такой изолятор 40v, так как коаксиальный кабель 40u имеет изоляционное покрытие.
(3) Четвертый и пятый вариант осуществления
Четвертый и пятый варианты осуществления настоящего изобретения представлены на фиг.8 и 9 и фиг.10 и 11 соответственно. В этом случае элементы, аналогичные или идентичные элементам вариантов осуществления с первого по третий, не описываются повторно и их позиции не приведены на чертежах. Коаксиальный источник 40r питания также не показан на этих чертежах.
В четвертом и пятом вариантах осуществления коаксиальный кабель 40u используется в качестве соединительной линии 40i, как и во втором и третьем вариантах осуществления. Так как коаксиальный разъем 40t имеет тенденцию отбрасывать тень на элемент 40р микрополосковой антенны, он исключается, чтобы не мешать обнаружению и приему сигнала микрополосковой антенной 40b ГССМ. Вместо этого, в четвертом и пятом вариантах осуществления используется проводящее соединение 40z, которое также обладает функцией водонепроницаемого уплотнения и образовано в сквозном отверстии обтекателя 40d в виде одного элемента, используемого для соединения излучателя гибкой штыревой 40с ОВЧ антенны с внутренним проводником коаксиального кабеля 40u.
В четвертом варианте осуществления для соединения излучателя гибкой штыревой антенны 40с ОВЧ с внутренним проводником коаксиального кабеля 40u сетчатый проводник 40х (и диэлектрический материал), служащий в качестве внешнего проводника, удаляется на заданную длину от конца коаксиального кабеля 40u, и внутренний проводник 40y проходит до соединения 40z через сквозное отверстие в микрополосковой антенне 40b ГССМ и соединяется с соединением 40z посредством пайки. В пятом варианте осуществления проводящий стержень 40аb, объединенный (или соединенный в соединении 40z) с излучателем гибкой штыревой антенны 40с ОВЧ, проходит внутрь контейнера 40а через сквозное отверстие микрополосковой антенны 40b ГССМ. Проводящий стержень 40ab затем соединяется с внутренним проводником 40y в позиции под проводником основания микрополосковой антенны 40b ГССМ, как показано на чертеже.
Таким образом, часть внутреннего проводника 40y, в которой сетчатый проводник 40х удален, четвертого варианта осуществления и проводящий стержень 40ab пятого варианта осуществления служат соответственно в качестве излучателя гибкой штыревой антенны 40с ОВЧ. Внутренний диаметр сквозного отверстия микрополосковой антенны 40b ГССМ может быть уменьшен примерно до размера внешнего диаметра коаксиального кабеля 40u в четвертом варианте осуществления. Далее, сквозное отверстие 40ас для проводящего стержня, как показано на фиг.11, может быть уменьшено до размера внешнего диаметра проводящего стержня 40аb плюс небольшой зазор, достаточный для обеспечения необходимой изоляции в пятом варианте осуществления. Это значительно увеличивает доступный частотный диапазон (который повышает свободу действия при проектировании). Необходимо использовать изолятор 40ad, чтобы предпочтительно изолировать проводящий стержень 40аb и элемент 40р микрополосковой антенны, и, так как сквозное отверстие 40ас для проводящего стержня небольшое, внешний диаметр изолятора 40ad также может быть уменьшен. На фиг.11 изолятор 40ad изображен не в масштабе.
В четвертом варианте осуществления существует опасность разрушения припоя в соединении между внутренним проводником 40y и излучателем гибкой штыревой антенны 40с ОВЧ или отсоединение внутреннего проводника 40y, где удален сетчатый проводник 40х. В пятом варианте осуществления внутренний проводник 40y не проходит в обтекатель 40d, и внутренний проводник 40y может быть припаян, если необходимо, в точке (соединение 40аа) ниже микрополосковой антенны 40b ГССМ. Поэтому, при сравнении с четвертым вариантом осуществления, пятый вариант осуществления имеет преимущество в том, что нарушение работоспособности, такое как отсоединение внутреннего проводника 40y, может быть предотвращено и что, даже если и произойдет нарушение работоспособности, его легко можно будет исправить относительно простыми операциями.
Как четвертый, так и пятый варианты осуществления пытаются увеличить и обеспечить поверхность заземления гибкой штыревой антенны 40с ОВЧ посредством соединения и прикрепления сетчатого проводника 40х коаксиального кабеля 40u к проводнику 40n основания микрополосковой антенны 40b ГССМ. Конкретно, в четвертом варианте осуществления сетчатый проводник 40х припаивается около сквозного отверстия микрополосковой антенны 40b ГССМ, так что сетчатый проводник 40х электрически соединяется с проводником 40n основания или с внутренним проводником сквозного отверстия, которое электрически соединено с проводником 40n основания. В пятом варианте осуществления сетчатый проводник 40х соединяется и прикрепляется к проводнику 40n основания в соединении 40аа (одновременно с соединением внутреннего проводника 40y с проводящим стержнем 40ab) посредством использования крепежной детали, или разъема, или посредством припайки таким образом, что сетчатый проводник 40х электрически соединяется с проводником 40n основания. В частности, в пятом варианте осуществления можно исключить как внутренний проводник 40y, так и припаивание сетчатого проводника 40х. Это упрощает закрепление коаксиального кабеля 40u, и делает более легким замену и техническое обслуживание микрополосковой антенны 40b ГССМ.
(4) Шестой вариант осуществления
В вышеописанных вариантах осуществления гибкая штыревая антенна 40с ОВЧ и микрополосковая антенна 40b ГССМ установлены на поверхности контейнера 40а блока 40 надпалубной аппаратуры для автоматической системы опознавания, и радиосхема 40е ОВЧ, контроллер 40f, приемник 40g ГССМ и источник 40h питания установлены в контейнере 40а. С другой стороны, настоящее изобретение может быть осуществлено посредством установки или размещения других антенн и схем на поверхности контейнера 40а или внутри него.
Например, гирокомпас или гироскоп ГССМ может быть выполнен вместе с приемником 40g ГССМ для сбора динамической информации, касающейся судна, на котором установлено устройство. Гироскоп ГССМ принимает навигационное сообщение от навигационного спутника каждой антенной из многочисленных антенн ГССМ, расположенных разнесенными друг от друга. На основе принимаемого результирующего сигнала гироскоп ГССМ выполняет операции местоопределения для определения взаимного расположения обеих антенн, тем самым определяя ориентацию сегмента между обеими антеннами. Преимуществом гироскопа является то, что гироскоп ГССМ менее подвержен магнитным полям, чем гирокомпас, может быть использован около северного полюса или южного полюса, может определять ориентацию на основе географического севера вместо магнитного севера, может определять угол наклона корпуса судна и он удобный. С гироскопом ГССМ становится необязательным интерфейс гироскопа и вычисления для скорости движения по окружности судна.
Когда желательно осуществить настоящее изобретение путем применения или модификации устройства, показанного на фиг.2, с тем чтобы включить гироскоп ГССМ, многочисленные антенны ГССМ, такие как микрополосковые антенны, располагаются разнесенными друг от друга на поверхности контейнера 40а, и затем схема для вычисления положения и ориентации, основываясь на принимаемом выходном сигнале многочисленных антенн ГССМ, устанавливается внутри контейнера 40а. Пространство, требующееся между соответствующими антеннами ГССМ и необходимое для образования гироскопа ГССМ, составляет самое большее примерно несколько десятков сантиметров. Схема для определения ориентации, основываясь на принимаемом выходном сигнале от многочисленных антенн ГССМ, может быть реализована путем модификации приемника ГССМ, показанного на фиг.2 (путем добавления подпрограммы конкретной операции, позволяющей производить вычисление положения и ориентации для многочисленных точек). Поэтому, даже если гироскоп ГССМ встроен, лишь слегка увеличиваются размеры контейнера 40а и незначительно влияют на переносимость контейнера между судами. Необходимо отметить, что антенны ГССМ для гироскопа ГССМ могут быть использованы для генерирования сигналов “импульс в секунду” и определения положения.
Также можно разместить часть вспомогательного устройства 50 дальнего действия, то есть схему, относящуюся к беспроводной связи, в контейнере 40а и установить связанную с ним антенну 50а на поверхности контейнера 40а. Посредством конфигурации таким образом схем (особенно контроллера 40f и радиосхемы, относящейся к вспомогательной функции дальнего действия), размещенных в контейнере 40а, так что вводится часть вспомогательной функции дальнего действия, могут быть достигнуты преимущества, аналогичные тем, которые описаны в связи с первым вариантом осуществления. Такие преимущества включают использование навигационной поддержки, например, систем ИН-МАРСАТ-С или ОРБКОММ, уменьшение числа каналов в канале передачи внутри судна между надпалубной аппаратурой и подпалубной аппаратурой по сравнению с устройством, показанным на фиг.14, упрощение установки и переноса оборудования и исключение интерфейса дальнего действия. Для того чтобы встроить вспомогательную функцию дальнего действия, используется, например, устройство, такое как показанное на фиг.12 в котором часть вспомогательной функции дальнего действия, соответствующая интерфейсной функции для экипажа, показана в виде вспомогательного устройства 50с дальнего действия.
(5) Дополнение
В дополнение к использованию для судового оборудования или блока надпалубной аппаратуры настоящее изобретение также может быть применено тогда, когда необязательно выводить принимаемую информацию. Примеры таких применений включают в себя блок для необслуживаемой станции, то есть дополнительный блок на плаву для автоматической системы опознавания, который устанавливается на конструкции на плаву, расположенной стационарно в некотором водном пространстве, такой как баржа, маяк или искусственный остров, или другие плавающие конструкции, такие как буй.
Когда желательно осуществить настоящее изобретение для вышеуказанного применения, гибкая штыревая антенна 40с ОВЧ может быть установлена на поверхности контейнера 40а, а радиосхема 40е ОВЧ может быть размещена в контейнере 40а, чтобы передавать и принимать сообщение. С такой конфигурацией радиосхема 40е ОВЧ принимает сообщение от окружающих судов или береговой станции под управлением контроллера 40f, в то же самое время автоматически передавая сообщение к ним. Подлежащая передаче информация включает в себя статическую информацию для классификации, или идентификации, или индикации положения конкретной конструкции на плаву или плавающей конструкции, на которой устанавливается устройство согласно настоящему изобретению. Если такой конструкцией на плаву или плавающей конструкцией является объект, который испытывает значительные перемещения, текущее положение или т.п. может передаваться в виде динамической информации. Так как этот блок компактный, в котором одна или несколько схем и антенн встроены в единственный контейнер, его легче можно установить на буе или т.п., чем блок, сконфигурированный так, как показано на фиг.13 или 14. Кроме того, блок может функционировать только путем подачи питания, так как не нужно выводить принимаемую информацию.
Реферат
Изобретение относится к системе опознавания судового оборудования. Технический результат состоит в исключении проблем, связанных с потерями и ухудшениями характеристик сигнала в канале передачи внутри судна. Для этого надпалубный блок для автоматической системы опознавания установлен снаружи на судне. Надпалубный блок включает в себя радиосхему и связанную с ней антенну для передачи и приема сообщения, определитель места и связанную с ним антенну, связанный с ним контроллер и источник питания, и контейнер для размещения этих элементов. Канал передачи внутри судна, например кабель, соединяет наружный блок для автоматической системы опознавания и дисплей автоматической системы опознавания, служащий в качестве интерфейсного средства для экипажа. Сигнал, подлежащий передаче по каналу передачи внутри судна, представляет собой обработанный, например усиленный, сигнал, вместо необработанного выходного сигнала антенны ОВЧ. Так как блок встроен в единственный контейнер, его легко можно установить и перенести. 4 н. и 13 з.п. ф-лы, 15 ил.

Комментарии