Способ уменьшения качки судна - RU2738942C2
Код документа: RU2738942C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу уменьшения качки судна.
В частности, настоящее изобретение относится к способу уменьшения качки судна посредством бортовых управляемых рулей или других поворотных устройств, которые выполняют их функцию посредством вращения.
УРОВЕНЬ ТЕХНИКИ
Наряду с устройствами для измерения колебательной характеристики судна известны системы и средства для уменьшения килевой качки, бортовой качки, тряски, нежелательных движений судна.
Как правило, успокоитель бортовой качки для судна содержит по меньшей мере соответствующие бортовые управляемые рули, связанные с корпусом судна, которые выполнены с возможностью уменьшения качки судна при нулевой скорости судна, также называемого стоящим на якоре судном, и для движущегося судна. Успокоитель качки выполнен таким образом, что его бортовые управляемые рули содержат по меньшей мере одно дополнительное подвижное гидродинамическое приспособление.
Известны несколько форм бортовых управляемых рулей, среди которых присутствуют бортовые управляемые рули, имеющие две оси.
В частности, в патенте ЕР 2782822 В1 описано устройство для активной стабилизации судна, отличающееся тем, что судно в первом рабочем состоянии перемещается, а во втором рабочем состоянии останавливается или ставится на якорь. Устройство содержит по меньшей мере один элемент с профилем крыла, соединенный с приводом. Такой элемент с профилем крыла соединен с корпусом судна посредством шарнирного механизма, который выполнен с возможностью поворота элемента с профилем крыла посредством вращения вокруг первой и/или второй оси вращения, из нерабочего положения, в котором по меньшей мере одна поверхность элемента с профилем крыла является практически параллельной и находится вблизи внешней боковой поверхности судна, в рабочее положение, в котором элемент с профилем крыла выступает наружу относительно внешней боковой поверхности судна.
Известный уровень техники также представлен в WO 2009083892 A2 и ЕР 1498348 А1.
Как в ЕР 2782822 В1, так и в известном уровне техники вообще не рассматривается проблема отрицательного вклада замедляющих эффектов, имеющих значение соответствующего порядка, применительно к ускоряющим и вязким эффектам, возникающим при вращении бортовых управляемых рулей, главным образом, в условиях нулевой скорости судна или стоящего на якоре судна.
Как будет объяснено ниже в последующем описании настоящего изобретения, на Фиг. 1 схематически проиллюстрировано судно с правым бортовым управляемым рулем. В качестве примера проиллюстрирован только правый бортовой управляемый руль, размеры и положения которого связаны с размерами судна. Бортовой управляемый руль проиллюстрирован в положении нулевого угла атаки. Понятие угла атаки, применимое в случае, когда судно перемещается, используется для определения нулевого положения бортового управляемого руля.
На Фиг. 2 проиллюстрировано применение бортового управляемого руля, в соответствии с известным уровнем техники, для стабилизации стоящего на якоре судна. Что касается нулевого положения, схематически проиллюстрированного на Фиг. 1, бортовой управляемый руль вращается вокруг нулевого положения на максимальный угол ±60°. Вращение бортового управляемого руля при нулевой скорости судна позволяет создать поперечный момент, который может уменьшить качку судна.
В случае стабилизации бортовой качки стоящего на якоре судна с помощью бортовых управляемых рулей при нулевой или низкой скорости судна используются бортовые управляемые рули, вращаемые в пределах диапазона максимальных углов примерно ±60° относительно нулевого положения.
Скорость вращения бортового управляемого руля создает силу, перпендикулярную бортовому управляемому рулю. Эта сила создает на судне поперечный момент, который пропорционален косинусу угла бортового управляемого руля, измеренного относительно нуля.
Когда бортовой управляемый руль параллелен основной оси судна, величина угла, принимаемого бортовым управляемым рулем, равна нулю, как проиллюстрировано на Фиг. 1.
Создаваемый поперечный момент, предполагающий поворот бортового управляемого руля на все 360° при постоянной скорости, который создает постоянную силу, пропорционален косинусу угла бортового управляемого руля. При величинах угла бортового управляемого руля ±90° его косинус равен нулю и, соответственно, создаваемый поперечный момент в этих точках равен нулю, причем в этих точках вращение бортового управляемого руля создает носовой момент. Поперечный момент, создаваемый вращением бортового управляемого руля, имеет максимальное значение для углов бортового управляемого руля, равных 0° и 180°.
На Фиг. 3 проиллюстрирован вид сбоку правого бортового управляемого руля судна, при этом нос находится справа, а корма находится слева. Кривая отображает коэффициент, характеризующий косинус угла бортового управляемого руля: данный коэффициент имеет максимальное значение для угла бортового управляемого руля равного 0° и 180°, и равен нулю, когда угол бортового управляемого руля равен +90° и -90°. С помощью графика в полярных координатах кривая как функция угла бортового управляемого руля отображает коэффициент, обусловленный величиной угла бортового управляемого руля при создании поперечного момента. Поперечный момент, создаваемый вращением бортового управляемого руля, в случае когда он осуществляет отклонение от начальной величины угла до конечной величины угла для обеспечения возможности стабилизации стоящего на якоре судна, в качестве неограничивающего примера, в диапазоне углов бортового управляемого руля ±30° и ходе в пределах от -30° до +30° зависит от силы, созданной бортовым управляемым рулем, при этом бортовой управляемый руль на первом этапе осуществляет ход с ускорением, на втором этапе - с постоянной скоростью, а на третьем этапе - с замедлением. Такая созданная сила имеет форму, примерно проиллюстрированную на Фиг 4.
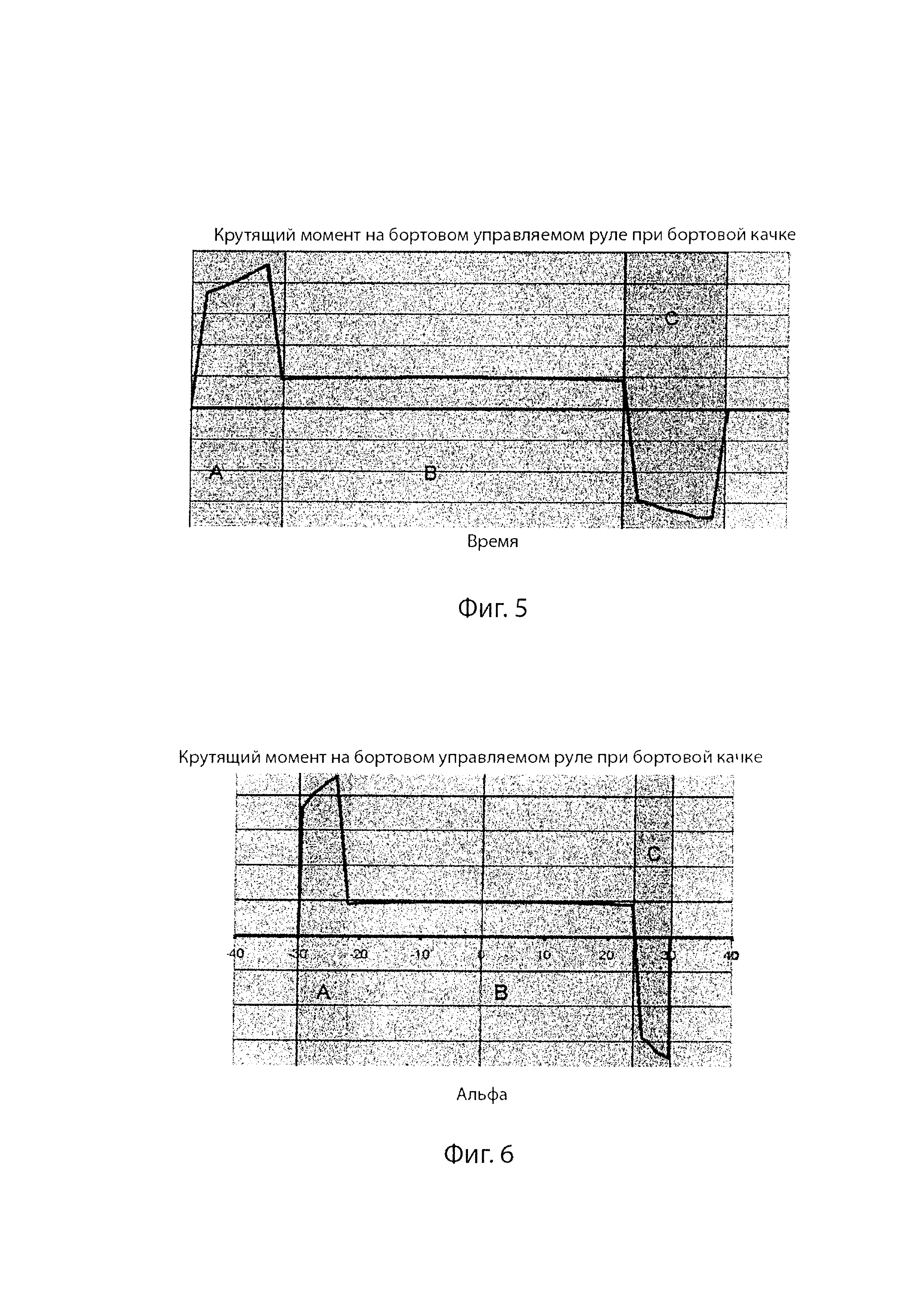
На этапе ускорения А и на этапе замедления С, силы инерции превышают силы сопротивления, при этом сила, созданная бортовым управляемым рулем на этапе В, создается при постоянной скорости. Сила инерции на этапе ускорения А имеет тот же знак, что и сила сопротивления на этапе В с постоянной скоростью; сила инерции, развиваемая бортовым управляемым рулем на этапе замедления С, имеет знак, противоположный силе сопротивления на этапе В с постоянной скоростью. Поскольку значение суммарной силы превышает значение силы сопротивления, на этапе замедления она имеет знак, противоположный знаку сил на двух других этапах. Таким образом, в случае если первые два этапа: этап ускорения А и этап с постоянной скоростью В обеспечивают поперечный момент, который препятствует поперечному движению судна, последний этап замедления С обеспечивает поперечный момент, который способствует увеличению самой бортовой качки и, следовательно, является неприемлемым для стабилизации бортовой качки.
На Фиг. 5 проиллюстрирована примерная характеристика поперечного момента с ходом бортового управляемого руля от -30° до +30. Ход бортового управляемого руля является примерным, а не ограничивающим; при этом имеется аналогичная кривая для хода от -40° до +40°, а также для хода от -60° до +60°.
Поперечный момент получают путем умножения силы, создаваемой бортовым управляемым рулем, на плечо и на косинус угла самого бортового управляемого руля. На Фиг. 6 проиллюстрирован поперечный момент, создаваемый бортовым управляемым рулем, при ходе между -30° и +30° в зависимости от угла бортового управляемого руля.
Во время этапа замедления С бортового управляемого руля при увеличении угла до 30°, создаваемый поперечный момент противоположен поперечному моменту на двух этапах: ускорения А и постоянной скорости В. Следовательно, поперечный момент, создаваемый на этапе замедления С, не содействует замедлению движения при бортовой качке судна, но способствует его увеличению, ограничивая эффект на этапах ускорения А и постоянной скорости В для бортового управляемого руля.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является устранение вышеупомянутых недостатков известного уровня техники путем обеспечения стабилизации, регулируемой таким образом, чтобы обеспечить устранение или уменьшение инерционных эффектов на этапе замедления бортового управляемого руля, когда эти эффекты являются основными или значимыми, по сравнению с эффектами этапов, которые уменьшают поперечное движение судна.
Еще одной целью является увеличение полезного эффекта, создаваемого бортовым управляемым рулем, применительно к существующему уровню техники.
Еще одной целью является контроль возмущений, вызванных бортовой качкой, килевой качкой и тряской (вертикальной) в сочетании или по отдельности.
В частности, решением данной задачи является контроль бортовой качки стоящего на якоре судна с помощью эффективной системы, которая дополнительно уменьшает бортовую качку, присутствующую в настоящее время из-за ограниченного углового отклонения в диапазоне +/-60° бортовых управляемых рулей, используемых в известном уровне техники.
Вышеупомянутые и другие цели, а также преимущества изобретения, как будет видно из последующего описания, достигаются с помощью способа уменьшения качки судна по п. 1. Предпочтительные варианты реализации и нетривиальные варианты настоящего изобретения являются объектом зависимых пунктов формулы изобретения.
Предполагается, что все пункты прилагаемой формулы изобретения являются неотъемлемой частью настоящего описания.
Очевидно, что многочисленные варианты и модификации (например, связанные с формой, размерами, расположениями и частями с эквивалентной функциональностью) могут быть выполнены в соответствии с описанием, не выходящим за рамки объема изобретения, как следует из прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Настоящее изобретение будет описано более подходящим способом с помощью некоторых предпочтительных вариантов его реализации, представленных в качестве неограничивающего примера со ссылкой на прилагаемые чертежи, на которых:
- на Фиг. 1 проиллюстрирован схематический вид судна с правым бортовым управляемым рулем в соответствии с известным уровнем техники;
- на Фиг. 2 проиллюстрирован схематический вид, относящийся к применению бортового управляемого руля на Фиг. 1;
- на Фиг. 3 проиллюстрирован вид сбоку правого бортового управляемого руля судна, при этом на чертеже корма находится справа, а нос находится слева, а также кривая коэффициента силы, развиваемой для получения поперечного момента, косинус угла бортового управляемого руля в соответствии с известным уровнем техники;
- на Фиг. 4 проиллюстрирована кривая силы бортового управляемого руля, создаваемой, когда бортовой управляемый руль осуществляет ход с первым этапом ускорения, вторым этапом с постоянной скоростью и третьим этапом замедления в соответствии с известным уровнем техники;
- на Фиг. 5 проиллюстрирована примерная характеристика поперечного момента в зависимости от времени в соответствии с известным уровнем техники;
- на Фиг. 6 проиллюстрирована примерная характеристика поперечного момента с ходом бортового управляемого руля от -30° до +30 в соответствии с известным уровнем техники;
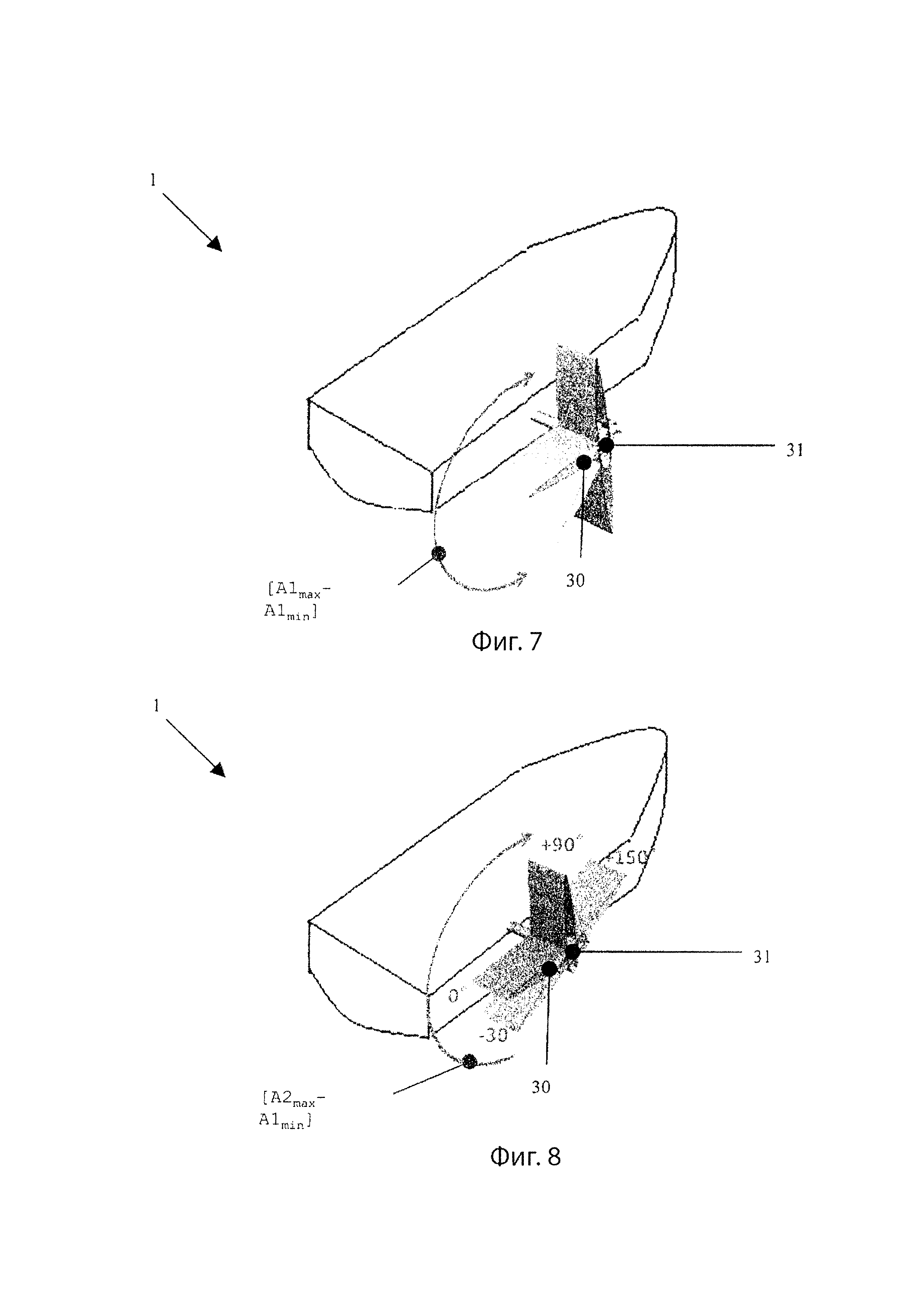
- на Фиг. 7 проиллюстрирована первая конфигурация для применения способа уменьшения колебаний при бортовой качке судна в соответствии с настоящим изобретением;
- на Фиг. 8 проиллюстрирована вторая конфигурация для применения способа уменьшения колебаний при бортовой качке судна в соответствии с настоящим изобретением;
- на Фиг. 9 проиллюстрирован вариант второй конфигурации предыдущей фигуры;
- на Фиг. 10 проиллюстрирована обобщенная конфигурация для Фиг. 7, 8, 9;
- на Фиг. 11 проиллюстрирована характеристика поперечного момента в зависимости от угла наклона бортового управляемого руля в первой конфигурации на Фиг. 7; и
на Фиг. 12 проиллюстрирована характеристика поперечного момента в зависимости от угла наклона бортового управляемого руля во второй конфигурации, проиллюстрированной на Фиг. 8.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
Со ссылкой на Фиг. 1 можно отметить, что способ уменьшения качки относится к судну 1, содержащему контроллер 10 привода 20, выполненный с возможностью перемещения по меньшей мере одного бортового управляемого руля 30 для обеспечения стабилизации судна 1 на нулевой скорости, когда судно стоит на якоре.
Со ссылкой на Фиг. 3-6, движение такого по меньшей мере одного бортового управляемого руля 30 включает в себя начальный этап ускорения, промежуточный этап с постоянной скоростью и завершающий этап замедления.
Преимущественно на начальном этапе ускорения такой по меньшей мере один бортовой управляемый руль 30 может начинать движение из первого углового положения A1min, тогда как на завершающем этапе замедления такой по меньшей мере один бортовой управляемый руль 30 может достигать второго углового положения A1max, A2max. В частности, второе угловое положение A1max, A2max соответствует минимальным или нулевым значениям эффектов, противоположных эффектам этапов ускорения и постоянной скорости бортового управляемого руля 30, что позволяет максимально увеличить полезный поперечный момент, создаваемый бортовым управляемым рулем 30.
В частности, такой по меньшей мере один бортовой управляемый руль 30 может выполнять более широкий поворот в пределах угла между -60° и +60° и поворот более чем на один полный угол.
Со ссылкой на Фиг. 7, когда судно 1 стоит на якоре, при нулевой скорости, второе угловое положение A1max соответствует углу наклона +90° бортового управляемого руля 30 относительно основной оси судна 1 для обеспечения возможности устранения эффектов инерционного торможения по сравнению с эффектами сопротивления, создаваемыми на этапе с постоянной скоростью, нейтрализуя поперечный момент, создаваемый бортовым управляемым рулем 30 на завершающем этапе замедления, относительно оси 31 вращения бортового управляемого руля 30.
Со ссылкой на Фиг. 8, второе максимальное угловое положение A2max соответствует углу наклона +150° бортового управляемого руля 30 относительно основной оси судна 1 для обеспечения возможности использования эффектов инерционного торможения по сравнению с инерционными эффектами ускорения, компенсирующими по меньшей мере момент качки промежуточного этапа, включенный в угловой наклон между 90° и 150° с постоянной скоростью относительно оси 31 вращения такого по меньшей мере одного бортового управляемого руля 30. Этап замедления обеспечивает такой же вклад, что и этап ускорения бортового управляемого руля. Только на этапе с постоянной скоростью, указанном с помощью обозначения ВВ на Фиг. 12, и при соответствующем значении угла бортового управляемого руля, включая значения между 90° и 150°, поперечный момент, создаваемый бортовым управляемым рулем, является противоположным поперечному моменту на других этапах.
Как проиллюстрировано на Фиг. 9, бортовой управляемый руль 30 может перемещаться в интервале между вторым угловым положением A2max и первым угловым положением A1min в течение половины периода, последующего за колебанием при бортовой качке.
Предлагаемый способ позволяет контролировать бортовую качку, килевую качку и тряску судна 1 или только бортовую качку, или только килевую качку, или только тряску, или их комбинации более эффективным способом, с бортовым управляемым рулем 30 одного и того же размера по сравнению с известным уровнем техники.
Бортовой управляемый руль 30 может относиться к устройствам, выполненным с возможностью взаимодействия с жидкостью, таким как гребные винты, водометные движители, любое устройство, в котором используется периодическое изменение направления создаваемой силы, системы, в которых используется эффект Магнуса.
Способ уменьшения качки судна настоящего изобретения обеспечивает достижение вышеуказанных заявленных целей.
В частности, способ позволяет обеспечить стабилизацию стоящего на якоре судна за счет увеличения угла поворота бортового управляемого руля от ±60° до ±90° и поворота на все 360°, как по часовой стрелке, так и против часовой стрелки.
Способ основан на использовании бортового управляемого руля с поворотом в большем, чем используется в настоящее время диапазоне ±60°. Фактически, только немногие производители бортовых управляемых рулей могут обеспечить данные углы, другие ограничиваются максимальным угловым отклонением ±45° относительно нулевого положения. Вместо этого в настоящем изобретении рассматривается использование бортового управляемого руля с углом поворотом, превышающим тот, что используется в настоящее время; в частности, указываются преимущества использования поворота на ±90° относительно нулевого положения; поворот на 180° от исходного положения, например 30°, бортового управляемого руля до конечного, например 150°, а также увеличение до полного оборота на 360° по часовой стрелке и/или против часовой стрелки.
Как проиллюстрировано на Фиг. 12, на этапе замедления создается поперечный момент с тем же знаком, что на этапе ускорения; на этапе с постоянной скоростью, обозначенном на Фиг. 12 как ВВ, создается момент, противоположный другим трем областям с углом, составляющим от 90° до 150°; гораздо меньшая часть, по сравнению с известным уровнем техники, поперечного момента имеет противоположный знак, который является полезным для стабилизации поперечного момента судна.
В частности, на Фиг. 9 проиллюстрирован вариант второй конфигурации, проиллюстрированной на Фиг. 8, и завершение вращения бортового управляемого руля для компенсации периода бортовой качки судна во второй конфигурации; с большим поперечным движением, причем бортовой управляемый руль выполняет полный оборот на 360° при полном обороте угла крена судна.
В случае использования электрического привода, в неограничивающем примере, легко вращать бортовой управляемый руль в более широком диапазоне по сравнению с текущим стандартным диапазоном ±60°. Также возможно обеспечить непрерывное вращение на все 360°. При условии, что, в неограничивающем примере, используемом для понимания данного явления, вращение бортового управляемого руля осуществляется с постоянной скоростью на все 360°, сила, создаваемая бортовым управляемым рулем, является постоянной.
Во время замедления бортового управляемого руля на этапе С для достижения 30° (при использовании от -30° до +30°), создаваемый поперечный момент противоположен поперечному моменту на одном из двух этапов: замедления А и постоянной скорости В. Следовательно, поперечный момент, создаваемый на этапе замедления, не содействует прекращению движения при бортовой качке судна, но способствует его увеличению, ограничивая эффект на этапах ускорения и постоянной скорости бортового управляемого руля. В случае, когда вместо остановки бортового управляемого руля при 30° он останавливается при 90°, то возникает нулевой поперечный момент, и поэтому для этапа торможения бортового управляемого руля данный отрицательный эффект исключается. Отрицательный эффект для стабилизации бортовой качки стоящего на якоре судна, обусловленный этапом торможения бортового управляемого руля нейтрализуется в случае, когда торможение происходит с углом бортового управляемого руля около 90° (коэффициент, обусловленный косинусом угла бортового управляемого руля, который равен нулю). При дальнейшем вращении, величина конечного угла превышает 90°, на этапе замедления создается поперечный момент с тем же знаком, что на этапе ускорения.
На Фиг. 11 проиллюстрирован поперечный момент, создаваемый бортовым управляемым рулем при его вращении от -30° до 90°. С учетом того, что энергия бортовой качки, рассеиваемая посредством данного тормозного момента, пропорциональна площади, ограниченной данной функцией, можно отметить, что величина рассеиваемой энергии намного больше при вращении между -30° и 90° по сравнению с используемым в настоящее время вращением, в данном примере от -30° до +30°, или при ходе в более широких пределах до ±60°. Поперечный момент, создаваемый бортовым управляемым рулем в области замедления, является практически нулевым и, следовательно, не оказывает отрицательного влияния на стабилизацию. Поэтому больший угол поворота бортового управляемого руля от -30° до 90° способствует увеличению демпфирующего эффекта, как из-за более длительного времени поперечного момента, так и из-за отсутствия отрицательной части, создаваемой замедлением бортового управляемого руля, вблизи 90° угла бортового управляемого руля на этапе С.
В случае, когда бортовой управляемый руль вращается вверх примерно до 150°, от -30° до +150°, создаваемый поперечный момент при торможении на этапе замедления С имеет тот же знак, что и на двух этапах: ускорения и постоянной скорости А, В бортового управляемого руля, до тех пор, пока не будет достигнуто 90°, как проиллюстрировано на Фиг. 12. Таким образом, этап замедления С также способствует уменьшению поперечного момента, компенсируя по меньшей мере часть поперечного момента с постоянной скоростью на этапе ВВ, когда угол бортового управляемого руля превышает 90°, на котором знак поперечного момента остается противоположным другим этапам.
В случае такого использования бортовой управляемый руль может перемещаться в диапазоне от +150° до -30° в течение следующей половины периода бортовой качки, создавая силу и связанный с ней поперечный момент, который позволяет уменьшить поперечное движение судна.
Вращение бортового управляемого руля на все 360° позволяет обеспечить демпфирование поперечного движения, стоящего на якоре судна или движущегося с нулевой или малой скоростью, более лучшим способом по сравнению с бортовым управляемым рулем с ходом в диапазоне от -60° до +60° с таким же бортовым управляемым рулем и при такой же скорости вращения.
Направление вращения также может совпадать с направлением часовой стрелки или быть противоположным направлению часовой стрелки. Кроме того, в случае, когда для компенсации качки судна достаточно использования бортового управляемого руля, его продолжают использовать в используемом в настоящее время стандартном диапазоне ±60°; в случае, когда качка судна усиливается, используют максимально возможный угол поворота (между любыми большими значениями диапазона) или вращение на все 360°. Подобное обоснование справедливо для стабилизации килевой качки стоящих на якоре судов или движений при их тряске: особенно чувствительными являются двухкорпусные суда с малой площадью действующей ватерлинии, катамараны, оснащенные четырьмя бортовыми управляемыми рулями (поверхностями) или другими управляющими устройствами (неподвижными гребными винтами и гребными винтами с качающимися осями), которые позволяют создавать продольный момент (закрылок, гребные винты).
Синхронизация угла бортового управляемого руля с углом крена при бортовой качке судна позволяет создавать силу (и, следовательно, поперечный момент), которая уменьшает поперечное движение судна. Данное новшество позволяет добиться значительных улучшений в демпфировании бортовой качки при использовании бортовых управляемых рулей меньшего размера, по сравнению с теми, что в настоящее время установлены на борту одних и тех же судов. Уменьшение размеров бортового управляемого руля приводит к уменьшению сопротивлений, что приводит к выигрышу в снижении потребления топлива и уменьшении загрязнения окружающей среды. Вместо этого, при использовании одинаковых бортовых управляемых рулей получают более высокие уровни комфорта при меньшей качке судна при одинаковых морских условиях.
Данное новшество является полезным и может применяться к стандартным бортовым управляемым рулям, а также к бортовым управляемым рулям с двумя осями вращения, описанным в вышеуказанном патенте ЕР 2782822 В1 или в цилиндре, в котором используется эффект Магнуса. Использование вращения вокруг оси 4 для стабилизации стоящего на якоре судна, смотрите Фиг. 1a-1b-1 с, проиллюстрированные в ЕР 2782822 В1 на этапе замедления, имеет такое же развитие параметра силы (и поперечного момента) на этапе торможения бортовых управляемых рулей: развиваемый момент является противоположным относительно ускорения и вращения на этапах с постоянной скоростью, которые служат для торможения поперечного движения судна. Вращение лопасти вокруг оси 3 вращения (обычная ось бортового управляемого руля) одновременно с вращением лопасти вокруг оси 4 позволяет предотвратить создание поперечного момента, противоположного желаемому; в случае, когда при вращении вокруг оси 3 лопасть бортового управляемого руля находится в вертикальном положении (направленная вверх кромка атаки, когда бортовой управляемый руль находится в нижней части и наоборот - в верхней части). Следовательно, отсутствует отрицательный эффект замедления движения вокруг оси 5, а также используется поперечный момент, развиваемый бортовым управляемым рулем при его обычном расширенном вращении в соответствии с настоящим изобретением. Для наиболее эффективной стабилизации бортовой качки стоящего на якоре судна необходимо, чтобы движение вокруг оси, параллельной оси судна, оси 4 на Фиг. 1, было одновременным с вращением на 90° вокруг оси 3 на той же фигуре. Таким образом, силы инерции на этапе торможения не способствуют уменьшению поперечного движения. На этапе замедления вращательного движения вокруг оси 4 без вращения лопасти вокруг оси 3 на 90° силы инерции из-за замедления способствуют образованию поперечного момента, который противоположен поперечному моменту на этапах ускорения и постоянной скорости вращения для вращения вокруг оси 4.
Вращение бортовых управляемых рулей вокруг обычной оси, для поверхностей с двумя осями, создает дополнительный поперечный момент (и продольный момент, в случае, когда одновременно используются противоположные поверхности), который улучшает параметры стабилизации.
Способ уменьшения качки судна настоящего изобретения существенно улучшает параметры стабилизации стоящего на якоре судна с бортовым управляемым рулем с двумя осями. То же новшество применимо для демпфирования килевой качки неподвижного судна в случае, когда судно оснащено четырьмя бортовыми управляемыми рулями. Обычный бортовой управляемый руль или бортовой управляемый руль с двумя осями в случае, когда их ход прекращается при величине угла 90° (лопасть бортового управляемого руля находится в вертикальном положении), не создают поперечный момент и продольный момент на этапе замедления. Вращение на 360° с половиной хода на 180° позволяет уменьшить движения при бортовой и/или килевой качке также на этапе замедления бортового управляемого руля или поверхности в целом. Бортовой управляемый руль или другое устройство могут непрерывно вращаться на все 360°, даже без остановок; он будет вращаться со скоростью вращения, достаточной для поперечного движения судна.
Проиллюстрированный бортовой управляемый руль является симметричным и имеет одну ось, но может иметь несимметричный профиль и иметь не только ось вращения. Идея изобретения также распространяется на устройства, которые создают силу посредством гребных винтов, водометных движителей и любого устройства, в котором используется периодическое изменение направления создаваемой силы.
Идея изобретения также может быть применена к системам, в которых используется эффект Магнуса, и которые в настоящее время устанавливаются в аналогичное положение бортовых управляемых рулей на судах. Данные вращающиеся цилиндры осуществляют горизонтальные колебания от кормы к носу и наоборот. Если данное устройство расположено в центре, внизу, на линии симметрии корабля, его можно поворачивать на 360° для стабилизации стоящего на якоре судна и при его перемещении.
В дополнение к силе, обусловленной эффектом Магнуса, присутствует масса цилиндра, которая способствует стабилизации в течение момента времени, когда он находится под углом 90° относительно основного направления судна.
Для достижения цели стабилизации бортовой качки (килевой качки и тряски) бортовые управляемые рули могут вращаться вблизи положения 180°, вместо вращения относительно нулевого положения при существующем уровне техники. Наклон вблизи положения 180° позволяет обеспечить стабилизацию бортовой качки (килевой качки и тряски) в обратном направлении; на данный момент, когда судно движется в обратном направлении относительно воды, бортовые управляемые рули удерживаются в нулевом положении, при этом не происходит уменьшение движений; это, безусловно, имеет место для скоростей движения в обратном направлении, превышающих 1 или 2 узла.
С помощью предлагаемого решения, движения при бортовой качке (килевой качке и тряске) судна демпфируются также в случае, когда судно движется в обратном направлении. Во многих случаях судно движется в обратном направлении относительно воды, произвольно и непроизвольно. Когда судно неподвижно при попутных волнах, неподвижно в устье реки, когда корма судна находится на грунте, произвольные перемещения в обратном направлении указывают на отрицательную относительную скорость судна относительно воды.
Бортовые управляемые рули во время движения для стабилизации стоящего на якоре судна также создают продольную тягу, сообщая движение судну, которая в некоторых ситуациях должна быть компенсирована с помощью соответствующих действий. Если судно оснащено четырьмя бортовыми управляемыми рулями, то пара бортовых управляемых рулей может использоваться с наклоном вблизи нулевого положения, а другая пара может использоваться с наклоном вблизи 180°. Таким образом, продольные передние и задние тяги пары бортовых управляемых рулей являются противоположными, и судно не подвергается продольным перемещениям, исключая необходимость использования других систем для поддержания его положения.
Также в случае использования только двух бортовых управляемых рулей, использование одного бортового управляемого руля вблизи нулевого положения, а другого - вблизи 180° уменьшает продольную тягу.
Вращение на все 360° увеличивает эффект от использования бортовых управляемых рулей для стабилизации стоящего на якоре судна. В частности, данное удлинение хода также позволяет повысить скорость бортового управляемого руля до тех областей, где ускорение обеспечивает положительный вклад в демпфирование бортовой качки, и понизить в тех областях, где инерционный вклад создаваемого поперечного момента меньше. Сосредоточение углового ускорения бортового управляемого руля вблизи нулевого положения (и 180°) содействует решению задачи демпфирования бортовой качки. Подобным образом сосредоточение замедления бортового управляемого руля в области углов бортового управляемого руля вблизи +90° и -90° уменьшает отрицательное влияние силы инерции на стабилизацию бортовой качки стоящего на якоре судна.
Реферат
Изобретение относится к области судостроения, в частности к способам уменьшения качки судна. Предложен способ уменьшения качки судна (1), содержащего контроллер (10) привода (20), выполненный с возможностью перемещения по меньшей мере одного бортового управляемого руля (30) для обеспечения стабилизации судна (1), когда судно (1) имеет нулевую скорость, стоит на якоре, причем движение такого по меньшей мере одного бортового управляемого руля (30) включает в себя начальный этап ускорения, промежуточный этап с постоянной скоростью и завершающий этап замедления. На начальном этапе ускорения такой по меньшей мере один бортовой управляемый руль (30) может начинать движение с первого углового положения (A1min), тогда как на завершающем этапе замедления такой по меньшей мере один бортовой управляемый руль (30) может достигать второго углового положения (A1max, A2max), соответствующего минимальным или нулевым значениям эффектов, противоположных тем, которые выполняются на этапах ускорения и постоянной скорости по меньшей мере одного бортового управляемого руля (30), чтобы обеспечить максимальное увеличение полезного поперечного момента, создаваемого таким по меньшей мере одним бортовым управляемым рулем (30). Предложенный способ уменьшения качки судна существенно улучшает параметры стабилизации стоящего на якоре судна. 6 з.п. ф-лы, 12 ил.
Комментарии