Устройство контроля остойчивости судна - RU169161U1
Код документа: RU169161U1
Чертежи
Описание
Предлагаемая полезная модель относится к судостроению, а именно к устройствам, предназначенным для обеспечения сбалансированного положения объектов водного транспорта. Устройство может быть использовано на грузовых судах, испытывающих отклонения в виде крена и дифферента в результате неравномерной загрузки (контейнеровозах, паромах, балкерах и т.п.), а также на морских объектах, требующих динамического ориентирования в условиях волнения (морских платформах, трубоукладчиках и т.п.).
Известно устройство (см. патент РФ №2171204, опубл. 20.07.1999) контроля остойчивости судна, поддерживающее заданное состояние объекта в пространстве за счет использования гидродинамических рулей и балластных цистерн.
Недостатком рассмотренного устройства является невозможность обеспечения требуемой точности и скорости стабилизации судна при появлении сильного возмущающего воздействия. Это объясняется тем, что в аналоге отсутствуют средства контроля и диагностики, а устройства автоматического управления недостаточно оперативны. Кроме того, в процессе управления судном не предусмотрено средств выявления сбоев в работе и своевременной коррекции их последствий.
Указанный недостаток частично устранен в устройстве с замкнутым контуром управления рулями и программным по времени управлением балластными цистернами (патент РФ №2238881, опубл. 27.07.2001).
В устройство по патенту РФ №2267440, опубл. 10.01.2006, помимо указанных средств также входят: модели суммирующего усилителя, рулевого привода, программного блока, балластной цистерны, судна и судна в ускоренном времени, а также пять индикаторов сбоев. Устройство позволяет стабилизировать судно по углу дифферента при задании больших возмущений и диагностировать исправность основных блоков устройства с обобщенным контролем текущего процесса стабилизации судна и индикации о возможном будущем уходе судна из допустимой области путем прогнозирования процесса стабилизации в ускоренном масштабе времени. Однако из-за возникновения критических ошибок, вызванных несоответствием параметров заложенных математических моделей параметрам реального судна, устройство обладает недостаточной точностью. Кроме того, устройство оперирует определенным и неизменным рабочим объемом балластных вод, что резко снижает точность и скорость балластировки в аварийных ситуациях и, как результат, не обеспечивает достаточной остойчивости судна.
Из известных решений наиболее близким аналогом (прототипом) предлагаемого устройства по технической сущности и назначению является устройство контроля остойчивости судна с помощью балластной системы, описанной в патенте РФ №160593, МПК В63В 43/06, опубл. 27.03.2016. Устройство содержит блок автоматического управления балластными креновыми и дифферентными цистернами, снабженными датчиками нижнего и верхнего уровней и соединенными между собой и забортной водой трубопроводами с всасывающими и напорными каналами, на входах которых установлены гидроклапаны, подключенные к перекачивающему насосу. Управление положением судна осуществляется по сигналам, приходящим на блок автоматического управления устройства от датчиков крена и дифферента и обеспечивающим распределение балласта в цистернах из условия компенсации крена или дифферента. Блок автоматического управления прототипа включает набор программ - команд на включение балластной системы, при котором судно не выходит из допустимого коридора по заданной точности удержания угла дифферента и крена.
Одним из основных недостатков прототипа является управление положением судна по заранее заданным программам. Параметры же заложенных в программы данных в процессе эксплуатации могут измениться в результате смещения груза, приводящего к аварийной ситуации, что в случае непринятия своевременных защитных мер может привести к потере остойчивости судна и его опрокидыванию.
Технический результат от использования предлагаемой полезной модели заключается в повышении безопасности морских грузоперевозок за счет обеспечения аварийной остойчивости судна.
Для достижения указанного технического результата используется следующая совокупность существенных признаков: устройство контроля остойчивости судна, (включающее так же, как и прототип, балластную систему с датчиками крена и дифферента судна и креновыми и дифферентными цистернами, соединяемыми между собой и с забортной водой трубопроводами, на входах которых установлены электрические гидроклапаны, подключенные к перекачивающему насосу, управляемые входы которых подключены к блоку автоматического управления), в отличие от прототипа, дополнительно содержит устройство видеонаблюдения за расположением груза, блок ввода и хранения данных о параметрах и размещении груза, блок определения перемещения груза, первый и второй блоки вычисления метацентрической высоты, блок оценки крена, дифферента и метацентрической высоты, блок вычисления крена и дифферента, блок оценки компенсации крена и дифферента, при этом выход блока ввода и хранения данных о параметрах и размещении груза устройства подключен к входам первого блока вычисления метацентрической высоты и блока определения перемещения груза, выходы которых соединены с входами блока оценки крена и дифферента и метацентрической высоты, выход которого в свою очередь соединен с входами второго блока вычисления метацентрической высоты и блока оценки компенсации крена и дифферента, выход блока видеонаблюдения за расположением груза подключен к второму входу блока определения перемещения груза, вход и выходы блока вычисления крена и дифферента соединены соответственно с выходами датчиков крена и дифферента судна, второго блока вычисления метацентрической высоты и блока оценки компенсации крена и дифферента, а выходы второго блока вычисления метацентрической высоты и блока оценки компенсации крена и дифферента соединены с блоком автоматического управления.
Сущность полезной модели состоит в следующем.
Известно, что одной из самых важных характеристик судна, обеспечивающих безопасность морских грузовых перевозок, а также проведение грузовых операций у причала и на рейде, является остойчивость судна, для оценки которой может быть использовано устройство определения метацентрической высоты (Н.Б. Севастьянов. Остойчивость промысловых судов, Л. Судостроение, 1970 с. 189). Если по результатам вычислений оказывается, что метацентрическую высоту необходимо корректировать, то на балластную систему устройства подаются команды, по которым она оперативно реагирует на изменение положения груза, обеспечивая устойчивое положение судна. В предлагаемом устройстве изменение этой характеристики постоянно отслеживается и корректируется. Для этого при загрузке судна в порту или на рейде в креновый и дифферентный каналы устройства управления вводятся данные о массе каждого элемента груза, его габаритах и расположении. Во время перехода судна устройством осуществляется непрерывное видеонаблюдение за фактическим расположением груза. В результате по данным видеонаблюдения в случае перемещения отдельных грузов регистрируется их новое расположение и на основании данных об их параметрах корректируется математическая модель распределения груза на борту объекта и одновременно вычисляется остойчивость судна в новых условиях.
Сопоставление предлагаемого устройства и прототипа показало, что поставленная задача - повышение безопасности морских грузоперевозок за счет обеспечения аварийной остойчивости судна - решается в результате новой совокупности признаков, что доказывает соответствие предлагаемой полезной модели критерию патентоспособности «новизна».
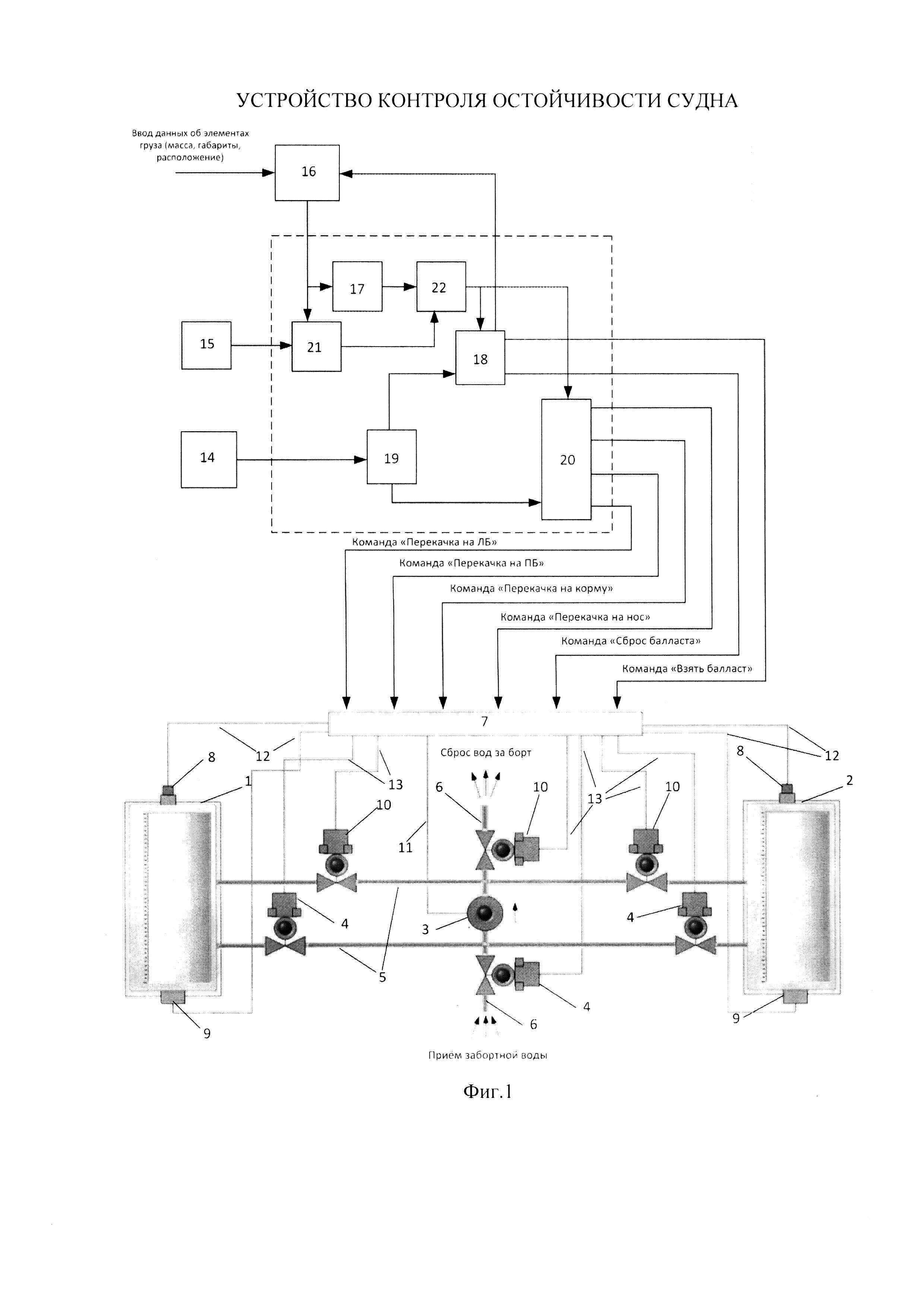
Сущность полезной модели поясняется на фиг. 1, где дано схематическое изображение устройства.
Устройство содержит левую 1 и правую 2 балластные цистерны, перекачивающий насос 3, электрические гидроклапаны 4, установленные на всасывающих каналах трубопроводов балластных цистерн 5 и трубопровода забортной воды 6, блок автоматического управления 7, датчик верхнего уровня 8, датчик нижнего уровня 9, электрические гидроклапаны 10, установленные на напорных каналах трубопроводов 5 и 6, вход управления питанием насоса 11, выходы датчиков уровня 12, управляемые входы 13 клапанов, датчики крена (дифферента) 14, устройство видеонаблюдения за расположением груза 15. Устройство также включает блок ввода и хранения данных о параметрах и размещении груза 16, первый 17 и второй 18 блоки вычисления метацентрической высоты, блок вычисления крена и дифферента 19, блок оценки компенсации крена и дифферента 20, блок определения перемещения груза 21, блок оценки крена, дифферента и метацентрической высоты 22.
В качестве датчиков крена и дифферента в предлагаемом устройстве могут быть использованы трехосевые акселерометры с точностью не хуже 0,1°. Видеонаблюдение за расположением груза может осуществляться с помощью функциональной веб-камеры. Вычислительные блоки могут быть реализованы на типовых логических счетно-решающих элементах или микроконтроллерах: блок автоматического управления 7 на элементах совпадения и элементах дискретной логики (логическое «И», «ИЛИ»), которые разрешают или блокируют прохождение команд на управляемые входы исполнительных органов (клапанов, насоса), блок 16 - на базе микропроцессорного или микроконтроллерного устройства (например, на базе персонального компьютера), блоки 17-22 - в виде микропроцессорных или микроконтроллерных устройств. Причем архитектура предлагаемого устройства позволяет реализовать все указанные блоки на базе одного микропроцессорного или микроконтроллерного вычислительного устройства
Перечисленные блоки выполняют следующие функции.
После введения в блок ввода и хранения 16 всех данных о составе и расположении груза на борту судна блоком 17 на основании данных о размещении груза производится вычисление метацентрической высоты судна при заданном при погрузке расположении элементов груза. Для слежения за фактическим расположением груза на судне установлены видеокамеры 15, совокупная зона обзора которых обеспечивает контроль всей площади поверхности груза. Информация с видеокамер передается на блок 21, выполняющий функции распознавания образов элементов груза и идентификацию их перемещений. Блок 21 также получает сведения о составе и размещении груза, вводимые с блока 16. В блоке 21 распознанные объекты сопоставляются с данными об элементах груза и, таким образом, к каждому распознанному объекту привязываются физические параметры соответствующих элементов груза. Данные с блоков 17 и 21 поступают на блок 22, который выполняет функцию оценки крена, дифферента и метацентрической высоты судна на основании данных о грузе, включая результаты видеонаблюдения. В результате по данным видеонаблюдения регистрируется перемещение отдельных грузов и на основании данных об их параметрах вычисляется остойчивость судна, крен и дифферент.
В тех случаях, когда изменения загрузки судна невозможно идентифицировать с помощью внешнего видеонаблюдения (перемещение элементов груза в общем объеме, скрытое от обзора камер, или случай затопления отсеков судна), устройство получает данные о фактических углах крена и дифферента судна от датчиков 14, поступающих на блок 21. Выходные данные с блока 19 поступают на блок 20, который выполняет функции выработки команд на распределение общего объема балластных вод по балластным цистернам, расположенным по правому и левому бортам, а также на носу и корме судна. Команды вырабатываются на основании данных о крене и дифференте. Блок 19 также выполняет дополнительную функцию - идентификацию метацентрической высоты судна при стоянке в порту или на рейде.
Предлагаемое устройство работает следующим образом.
Как было указано выше, аварийная остойчивость судна является важнейшим параметром, который необходимо учитывать при транспортировке грузов, подверженных во время перехода судна возможности нештатного перемещения. При загрузке судна в порту или на рейде в систему через блок 16 вводятся данные о массе каждого элемента груза, его габаритах и расположении. Теоретически на основании данных о загрузке можно определить метацентрическую высоту судна и компенсирующие воздействия для его выравнивания по крену и дифференту. Блок 18 учитывает вычисления блока 19 и выдает результаты сравнения данных вычислений на пульт оператора. Если по результатам вычислений блока 18 оказывается, что метацентрическую высоту необходимо корректировать, то через блок 20 на балластную систему подаются команды, соответственно, на взятие дополнительного балласта или его сброс.
Данный объем в существующих системах остается неизменным до следующих погрузочно-разгрузочных работ. При таком подходе в результате нештатного смещения груза и, особенно, при его падении за борт может возникнуть ситуация, когда количества балластных вод будет недостаточно для компенсации крена или дифферента и предотвращения опасности опрокидывания судна.
В предлагаемом устройстве в аварийной ситуации производится оценка необходимого количества балласта и его распределение во время перехода судна. Корректировка количества балластных вод на борту осуществляется командами, формируемыми на выходах блока 18 «Взять балласт» и «Сбросить балласт». Благодаря предложенному решению принятие мер по предотвращению аварии, связанной с потерей груза или затоплением отсеков, осуществляется достаточно оперативно, так как идентификация и анализ ситуации происходит по нескольким каналам: визуальному и измерительному. Таким образом, при потере груза, изменяющей метацентрическую высоту судна, или при обнаружении недостатка балластных вод для осуществления компенсации крена и/или дифферента, это регистрируется (вычисляется на основании предоставляемых датчиками данных) блоком 18, который вырабатывает команды «Взять балласт» или «Сбросить балласт». Последнее особенно актуально в случае нештатного набора массы судном, что характерно при возникновении течи через пробоину с затоплением отсеков.
Распределение балласта в цистернах во время перехода судна осуществляется в устройстве также автоматически из условия компенсации крена или дифферента по командам «Перекачка на левый (правый) борт» или «Перекачка на корму (нос)», приходящим на блок автоматического управления от датчиков крена и дифферента с учетом данных о текущем и исходном положении груза.
По команде «Взять балласт», генерируемой блоком 18, временно блокируются команды перекачки насосом 3 жидкости между цистернами 1 и 2 и открывается один из клапанов 4, 10 трубопровода забортной воды. При этом за счет наличия датчиков уровня 8 и 9 система блокировок устройства позволяет автоматически блокировать набор или сброс балласта в ту цистерну, которая переполнена или осушена полностью.
Во всех случаях предлагаемое устройство исключает влияние человеческого фактора и обеспечивает оперативный контроль крена, дифферента и осадки судна во время перехода. Предлагаемое устройство было разработано специалистами кафедры «Комплексное обеспечение информационной безопасности» ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» и кафедры «Электрооборудование судов и автоматизация производства» ФГБОУ ВО «Керченский государственный морской технологический университет» в составе научно-исследовательских работ кафедр. Были произведены расчеты, показавшие возможность использования предлагаемой системы на объектах морского транспорта, требующих управления осадкой, креном и дифферентом и оперативного предупреждения катастроф в случае непредвиденного смещения грузов на борту объекта в аварийных ситуациях. В 2015 г. система была апробирована на пароме «Керченский-2», курсирующем по маршруту порт «Крым» - порт «Кавказ» в Керченском проливе.
Изложенное позволяет сделать вывод о соответствии полезной модели критерию «промышленная применимость».
Реферат
Полезная модель относится к судостроению, а именно к устройствам, предназначенным для обеспечения сбалансированного положения объектов водного транспорта. Устройство может быть использовано на грузовых судах, испытывающих отклонения в виде крена и дифферента в результате неравномерной загрузки (контейнеровозах, паромах, балкерах и т.п.), а также на морских объектах, требующих динамического ориентирования в условиях волнения (морских платформах, трубоукладчиках и т.п.). Устройство, так же как и прототип, содержит: балластную систему с датчиками крена и дифферента судна и креновыми и дифферентными цистернами, соединяемыми между собой и с забортной водой трубопроводами, на входах которых установлены электрические гидроклапаны, подключенные к перекачивающему насосу, управляемые входы которых подключены к блоку автоматического управления. В отличие от прототипа, устройство дополнительно содержит устройство видеонаблюдения за расположением груза, блок ввода и хранения данных о параметрах и размещении груза, блок определения перемещения груза, первый и второй блоки вычисления метацентрической высоты, блок оценки крена, дифферента и метацентрической высоты, блок вычисления крена и дифферента, блок оценки компенсации крена и дифферента. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Судовое балластное устройство
Комментарии