Способ управления плавучим средством и плавучее средство - RU2744812C1
Код документа: RU2744812C1
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее описание относится к плавучему средству, содержащему подводное крыло.
Аспекты изобретения относятся к способу управления плавучим средством и плавучему средству, в котором реализован предложенный способ.
УРОВЕНЬ ТЕХНИКИ
Известны различные плавучие средства. Например, доски для серфинга могут быть использованы для серфинга на волнах. Кайт серфинг включает в себя использование воздушного змея в качестве привода для доски для серфинга, которая прикреплена к ногам пользователя. Гидроцикл - это моторизованное плавучее средство, которое использует направленную струю воды для продвижения через воду и управления направлением движения.
Каждое из этих плавучих средств имеет свои преимущества и недостатки. Например, серфинг и кайт-серфинг имеют крутые обучающие криволинейные поверхности и могут требовать для реализации конкретных условий океанской поверхности. Гидроциклы проще в использовании для новичков, но требуют использования мощных двигателей для достижения разумных скоростей, в связи с большим размером (по сравнению, например, с доской для серфинга) и тяги.
Объектом настоящего изобретения является устранение недостатков уровня техники, а также альтернативный способ и плавучее средство описанные ниже.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Аспекты и варианты реализации изобретения предусматривают способ управления плавучим средство и плавучее средство, реализующее способ.
В соответствии с одним из аспектов изобретения, предусмотрен способ управления плавучим средством, содержащим по меньшей мере одно подводное крыло, причем, указанное по меньшей мере одно подводное крыло, содержит одно или несколько отверстий на его первой и/или второй поверхности, где способ содержит:
определение количества жидкости, которая вытесняется или отводится через хотя бы одно из одного или нескольких отверстий; и
выталкивание или отведение текучей среды через по меньшей мере одно из одного или нескольких отверстий в соответствии с определенным количеством так, чтобы изменить и/или создать на подводном крыле силу рыскания, тангажа и/или крена, с обеспечением управления плавучим средством.
Первая поверхность может быть верхней поверхностью, а вторая поверхность может быть нижней поверхностью.
Первая поверхность может быть левой поверхностью, а вторая поверхность может быть правой поверхностью.
Выталкивание или отведение текучей среды через по меньшей мере одно из одного или нескольких отверстий может привести к изменению давления на поверхности, связанной с отверстием или отверстиями, с обеспечением изменения и/или формирования силы рыскания, тангажа или крена.
Подводное крыло может содержать части подводного крыла, которые смещены друг от друга продольно, поперечно или в двух направлениях по отношению к предполагаемому направлению движения через воду.
Путем выталкивания или отведения текучей среды через одно или больше отверстий с обеспечением изменения общего подъема, производимого каждой из частей подводного крыла, может формироваться сила вращения, обеспечивающая формирование силы рыскания, тангажа и/или крена.
Плавучее средство может иметь продольную ось в предполагаемом направлении движения через воду, при этом по меньшей мере одно подводное крыло содержит:
первую часть подводного крыла, содержащую одно или несколько отверстий; и
вторую часть подводного крыла, смещенную под углом вокруг продольной оси относительно первой части подводного крыла, причем вторая часть подводного крыла содержит одно или несколько отверстий; а
выталкивание или отведение жидкости заключается в выталкивание или отведении жидкости через одно или несколько отверстий на первой части подводного крыла с отличием от выталкивания или отведения жидкости через одно или несколько отверстий на второй части подводного крыла.
Первая часть подводного крыла может содержать первую поверхность в виде верхней поверхности и вторую поверхность в виде нижней поверхности, вторая часть подводного крыла может содержать первую поверхность в виде верхней поверхности и вторую поверхность в виде нижней поверхности, и каждая из верхних поверхностей и нижних поверхностей подводного крыла может содержать по крайней мере одно отверстие.
Способ может включать в себя выборочное выталкивание или отведение жидкости через несколько или все отверстия с обеспечением формирования силы.
Плавучее средство может содержать по меньшей мере одну боковую ось, а по меньшей мере одно подводное крыло содержит:
третью часть подводного крыла, содержащую одно или несколько отверстий; и
четвертую часть подводного крыла, смещенную назад относительно предполагаемого направления движения плавучего средства вперед, относительно третей части подводного крыла, причем четвертая часть подводного крыла содержит одно или несколько отверстий. Выталкивание или отведение жидкости может включать выталкивание или отведение жидкости через одно или несколько отверстий на третьей части подводного крыла с отличием относительно выталкивания или отведения жидкости через одно или несколько отверстий на четвертой части подводного крыла.
Третья часть подводного крыла может содержать первую поверхность в виде верхней поверхности и вторую поверхность в виде нижней поверхности; и
четвертая часть подводного крыла содержит первую поверхность в виде верхней поверхности и вторую поверхность в виде нижней поверхности;
при этом каждая из верхней и нижней поверхностей третьей и последующей частей подводных крыльев содержит по меньшей мере одно отверстие. Способ содержит избирательное выталкивание или отведение жидкости через некоторые или все выпускные отверстия с обеспечением формирования силы.
По крайней мере одна из частей подводного крыла может содержать множество отверстий, где одно или несколько отверстий включают тыльные отверстия, и одно или несколько отверстий, включают фронтальные отверстия, причем одно или несколько тыльных отверстий смещены назад относительно предполагаемого прямого направления движения плавучего средства относительно одного или нескольких фронтальных отверстий, при этом:
выталкивание или отведение жидкости включает в себя выталкивание или отведение жидкости через тыльные отверстия с отличием от выталкивания или отведения жидкости через фронтальные отверстия с обеспечением формирования силы рыскания, тангажа и/или крена на подводном крыле.
Способ может включать в себя выталкивание вытеснение или отведение текучей среды в точке разделения потока или рядом с точкой разделения потока на одной или нескольких частях подводного крыла.
Способ может включать в себя: определение скорости, с которой обеспечивают выталкивание или отведение жидкости через каждое из отверстий, с использованием по меньшей мере одного из параметров:
угол атаки по меньшей мере одного из участков подводных крыльев;
скорость перемещения подводного крыла относительно воды;
угол наклона плавучего средства;
угол крена плавучего средства;
угол рыскания плавучего средства; и
скорость изменения любого одного или нескольких из параметров: угол атаки по меньшей мере одного из участков подводных крыльев, скорость перемещения подводного крыла относительно воды, угла поворота плавучего средства, угла наклона плавучего средства и угла крена плавучего средства ; и
выталкивание или отведение жидкости в соответствии с определенной скоростью или скоростями.
Способ может включать в себя вытеснение части жидкости в виде струи с обеспечением продвижения плавучего средства относительно воды.
Плавучее средство может включать в себя выходной канал, отделенный от одного или нескольких отверстий с обеспечением выталкивания жидкости под давлением для продвижения плавучего средства через воду.
Способ может включать в себя управление выталкиванием или отведением текучей среды через одно или несколько отверстий таким образом, чтобы улучшался любой один или несколько из следующих параметров:
устойчивость плавучего средства;
энергоэффективность плавучего средства; и
эффективность поворота плавучего средства.
Плавучее средство может содержать платформу для размещения на ней человека и/или груза. По меньшей мере одно подводное крыло установлено под платформой так, что при использовании подъемная сила, создаваемая подводным крылом при его перемещении относительно воды, поднимает платформу с поверхности воды.
Плавучее средство может быть выполнено в виде ветроэнергетического плавучего средства. Например, плавучее средство может быть парусным плавучим средством или плавучим средством в приводом в виде воздушного змея. Плавучее средство может быть доской для виндсерфинга, доской для кайт-серфинга, парусной лодкой, яхтой, яликом или любым другим вида ветроэнергетическим плавучим средством.
Силы могут быть направлены на противодействие для противостоянию силе вращения, произведенной ветром, действующим на один или несколько парусов, воздушных змеев и/или других ветроэнергетических средств судна.
Согласно другому аспекту изобретения, предлагается плавучее средство, содержащее:
по меньшей мере одно подводное крыло;
одно или несколько отверстий на первой и/или второй поверхности подводного крыла;
средство для определения количества жидкости, которая вытесняется или отводится через хотя бы одно из одного или нескольких отверстий; и
средство для управления выталкиванием или отведением текучей среды через по меньшей мере одно из одного или нескольких отверстий в соответствии с количеством жидкости, определенным средством определения количества жидкости так, чтобы тем самым на подводном крыле изменять и/или создавать рыскание, тангаж и/или крен, с обеспечением управления плавучим средством.
Плавучее средство может иметь продольную ось в предполагаемом направлении движения через воду, а в плавучем средстве:
по меньшей мере одно подводное крыло содержит:
первую часть подводного крыла, содержащую одно или несколько отверстий; и
вторую часть подводного крыла, смещенную под углом вокруг продольной оси относительно первой части подводного крыла, причем вторая часть подводного крыла содержит одно или несколько отверстий; а
средство управления выполнено с возможностью выталкивания или отведения жидкости через одно или несколько отверстий на первой части подводного крыла с отличием от выталкивания или отведения жидкости через одно или несколько отверстий на второй части подводного крыла с обеспечением формирования силы.
Первая часть подводного крыла может содержать первую поверхность в виде верхней поверхности; и
вторую поверхность в виде нижней поверхности; вторая часть подводного крыла может содержатьпервую поверхность в виде верхней поверхности; и
вторую поверхность в виде нижней поверхности, причем каждая из верхних поверхностей и нижних поверхностей первой и второй частей подводных крыльев содержит по меньшей мере одно из отверстий; а
средство управления выполнено с возможностью избирательного вытеснения или отведения жидкости через некоторые или все отверстия, с обеспечением формирования силы.
Плавучее средство может иметь по крайней мере одну продольную ось в предполагаемом направлении движения через воду, в плавучем средстве:
по меньшей мере одно подводное крыло содержит:
третью часть подводного крыла, содержащую одно или несколько отверстий; и
четвертую часть подводного крыла, смещенную под углом вокруг продольной оси относительно первой части подводного крыла, причем вторая часть подводного крыла содержит одно или несколько отверстий. Выталкивание или отведение жидкости через одно или несколько отверстий может включать в себя выталкивание или отведение жидкости через одно или несколько отверстий третьей части подводного крыла с отличием от выталкивания или отведения жидкости через одно или несколько отверстий на четвертой части подводного крыла.
Третья часть подводного крыла может содержать первую поверхность в виде верхней поверхности; и
вторую поверхность в виде нижней поверхности; четвертая часть подводного крыла может содержать первую поверхность в виде верхней поверхности; и
вторую поверхность в виде нижней поверхности, причем каждая из верхних поверхностей и нижних поверхностей третьей и четвертой частей подводных крыльев содержит по меньшей мере одно из отверстий; а
средство управления выполнено с возможностью избирательного вытеснения или отведения жидкости через некоторые или все отверстия, с обеспечением формирования силы.
Подводное крыло может содержать множество отверстий, где одно или несколько отверстий включают тыльные отверстия, и одно или несколько отверстий, включают фронтальные отверстия, причем одно или несколько тыльных отверстий смещены назад относительно предполагаемого прямого направления движения плавучего средства относительно одного или нескольких фронтальных отверстий; и
средство управления может быть выполнено с возможностью избирательного выталкивания или отведение жидкости включает через тыльные отверстия с отличием от выталкивания или отведения жидкости через фронтальные отверстия с обеспечением формирования силы.
По крайней мере одно из отверстий может быть расположено в точке разделения потока или рядом с ней.
Плавучее средство может сдержать один или несколько датчиков, включающих один или несколько из:
одного или нескольких акселерометров для определения поступательного и/или вращательного положения и/или движения плавучего средства;
одного или нескольких датчиков скорости воды для определения скорости подводного крыла и/или плавучего средства относительно воды;
одного или нескольких датчиков угла для определения угла атаки подводного крыла относительно воды;
одного или нескольких датчиков угла для определения уровня плавучего средства относительно горизонтали;
одного или нескольких датчиков высоты для определения высоты платформы над водой;
одного или нескольких датчиков для определения направления потока над одной или несколькими поверхностями плавучего средства на подводных крыльях;
одного или нескольких датчиков давления для определения давления жидкости; одно или несколько средств глобального определения местоположения (GPS); и
одного или нескольких гироскопов для определения поступательного и/или вращательного положения и/или движения плавучего средства;
при этом средство для определения количества жидкости, которая вытесняется или отводится, по меньшей мере, через одно из одного или нескольких отверстий, выполнено с возможностью приема сигналов от одного или нескольких датчиков.
Средство для определения количества жидкости, вытесняемой или отводимой через по меньшей мере одно из одного или нескольких отверстий, может быть выполнено с возможностью указанного определения на основании, по меньшей мере, одного из параметров:
угол атаки по меньшей мере одного из участков подводных крыльев;
скорость перемещения подводного крыла относительно воды;
угол наклона плавучего средства;
угол крена плавучего средства;
угол рыскания плавучего средства; и
скорость изменения любого одного или нескольких из параметров: угол атаки по меньшей мере одного из участков подводных крыльев, скорость перемещения подводного крыла относительно воды, угла поворота плавучего средства, угла наклона плавучего средства и угла крена плавучего средства.
Плавучее средство может быть сконфигурировано с возможностью выталкивания части жидкости в виде струи с обеспечением перемещения плавучего средства через воду.
Плавучее средство может содержать водоструйный выпускной канал, отделенный от одного или нескольких отверстий, для вытеснения жидкости под давлением с обеспечением перемещения плавучего средства через воду
Средство для определения количества жидкости, которая выталкивается или всасывается, по меньшей мере, в одно из одного или нескольких отверстий может определять количество жидкости, с обеспечением улучшения одного или нескольких показателей из следующих:
стабильность судна;
энергоэффективность плавучего средства;
эффективность поворота плавучего средства.
Средства для определения количества жидкости, которая выталкивается или всасывается, по меньшей мере, в одно из одного или нескольких отверстий, содержат цифровой процессор.
Плавучее средство может содержать платформу для человека и/или груза, причем под платформой установлено по меньшей мере одно подводное крыло, так что при использовании подъемной силы, сформированной подводным крылом, когда оно движется по воде, происходит поднятие платформы с поверхности воды.
Платформа может быть доской для серфинга или парусником, или иметь физическую форму и/или форму доски для серфинга или парусника.
Плавучее средство может ветроэнергетическим. Например, плавучее средство может быть оснащено парусом или воздушным змеем. Плавучее средство может быть парусным плавучим средством, доской для виндсерфинга, доской для кайт-серфинга, парусной лодкой, яхтой, скифом или любым другим видом ветроэнергетического плавучего средства.
Сила может быть направлена на противодействие в противоположном направлении силе крена, создаваемой ветром, действующим на один или несколько парусов, воздушных змеев и/или другие средствами ветроэнергетики плавучего средства.
Плавучее средство может содержать один или несколько насосов для создания давления жидкости с обеспечением избирательного вытеснения или отведения жидкости через одно или несколько отверстий.
Плавучее средство может быть выполнено автономным или полуавтономным.
В рамках данной заявки явно подразумевается, что различные аспекты, варианты осуществления, примеры и альтернативы, изложенные в предыдущих абзацах, в формуле изобретения и/или в последующем описании и чертежах, и, в частности, их отдельные признаки, могут использоваться самостоятельно или в любой комбинации. То есть все варианты осуществления и/или признаки любого варианта осуществления могут комбинироваться любым способом и/или комбинацией, если только такие признаки не являются несовместимыми. Заявитель оставляет за собой право изменить любую первоначально поданную формулу изобретения или подать любую новую формулу изобретения соответствующим образом, включая право изменить любую первоначально поданную формулу изобретения, чтобы она зависела от любой другой формулы изобретения и/или включала в себя какую-либо особенность, хотя она изначально не была заявлена таким образом.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
В данном случае один или несколько вариантов осуществления изобретения будут описаны только в качестве примера со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 представляет собой вид в перспективе плавучего средства в соответствии с вариантом осуществления изобретения;
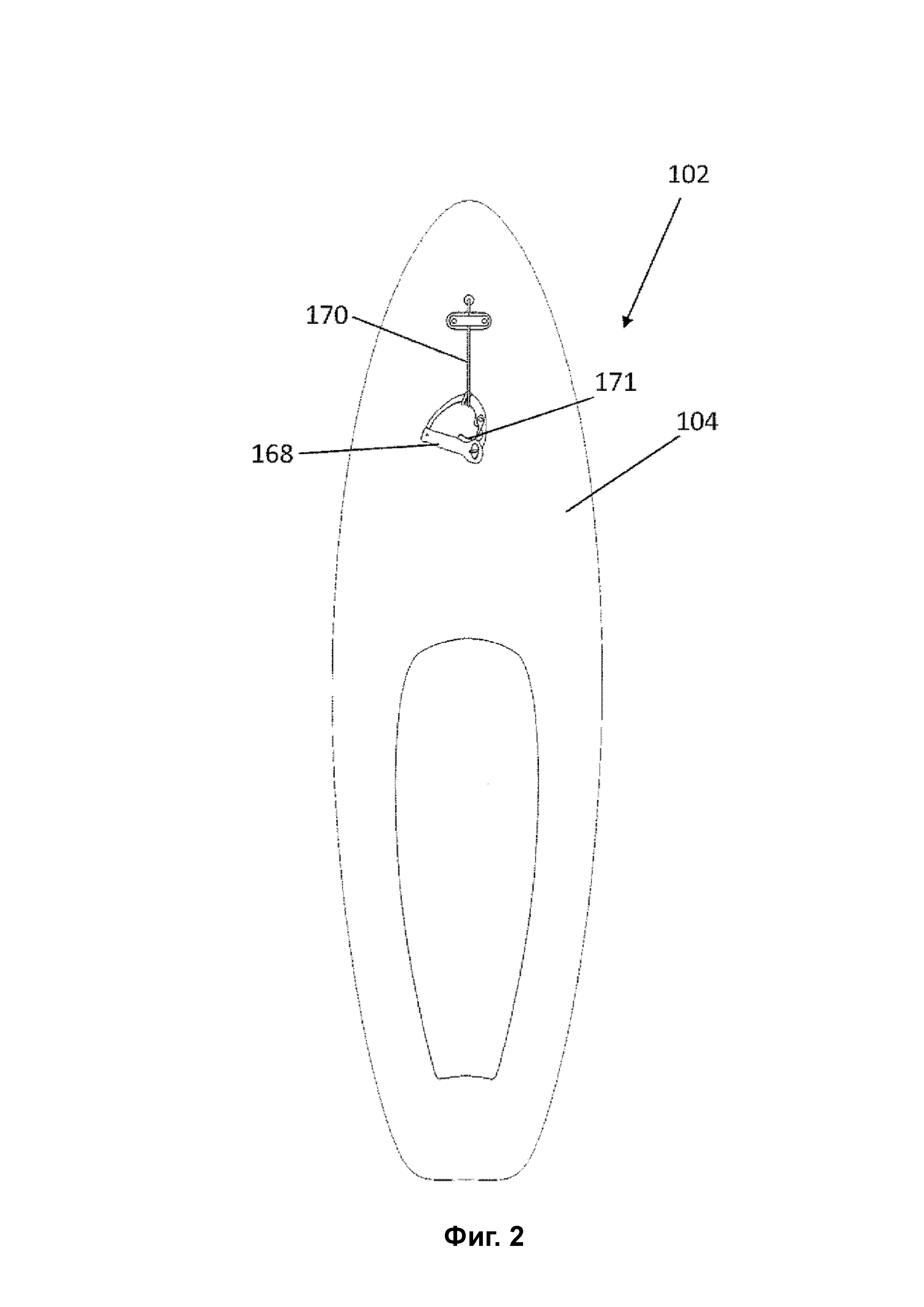
Фиг. 2 - вид сверху на плавучее средство, показанное на фиг. 1;
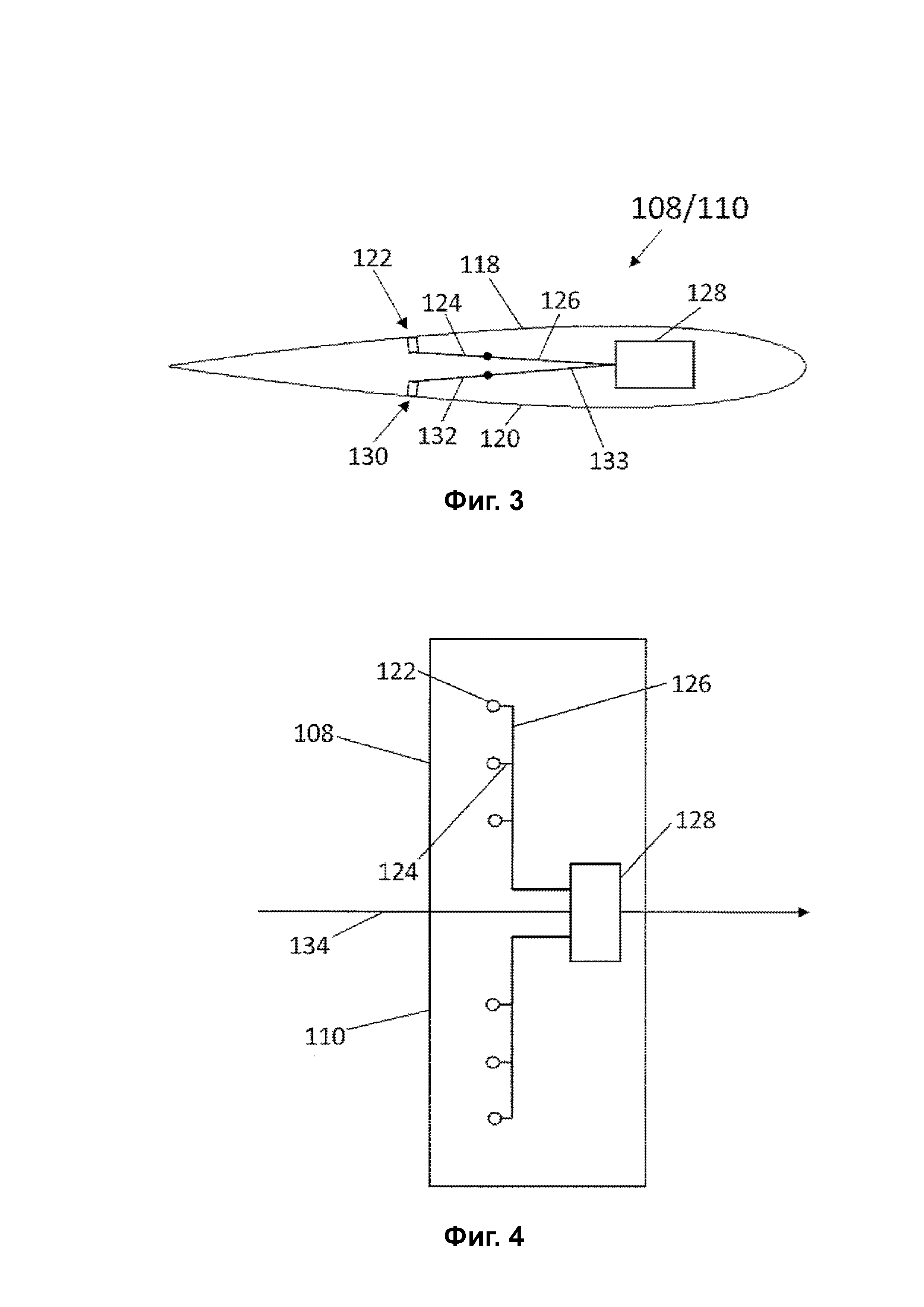
Фиг. 3 - вертикальный разрез упрощенной иллюстрации подводного крыла для использования с водным плавучим средством в соответствии с вариантом осуществления изобретения;
Фиг. 4 - вид сверху подводного крыла с фиг. 3;
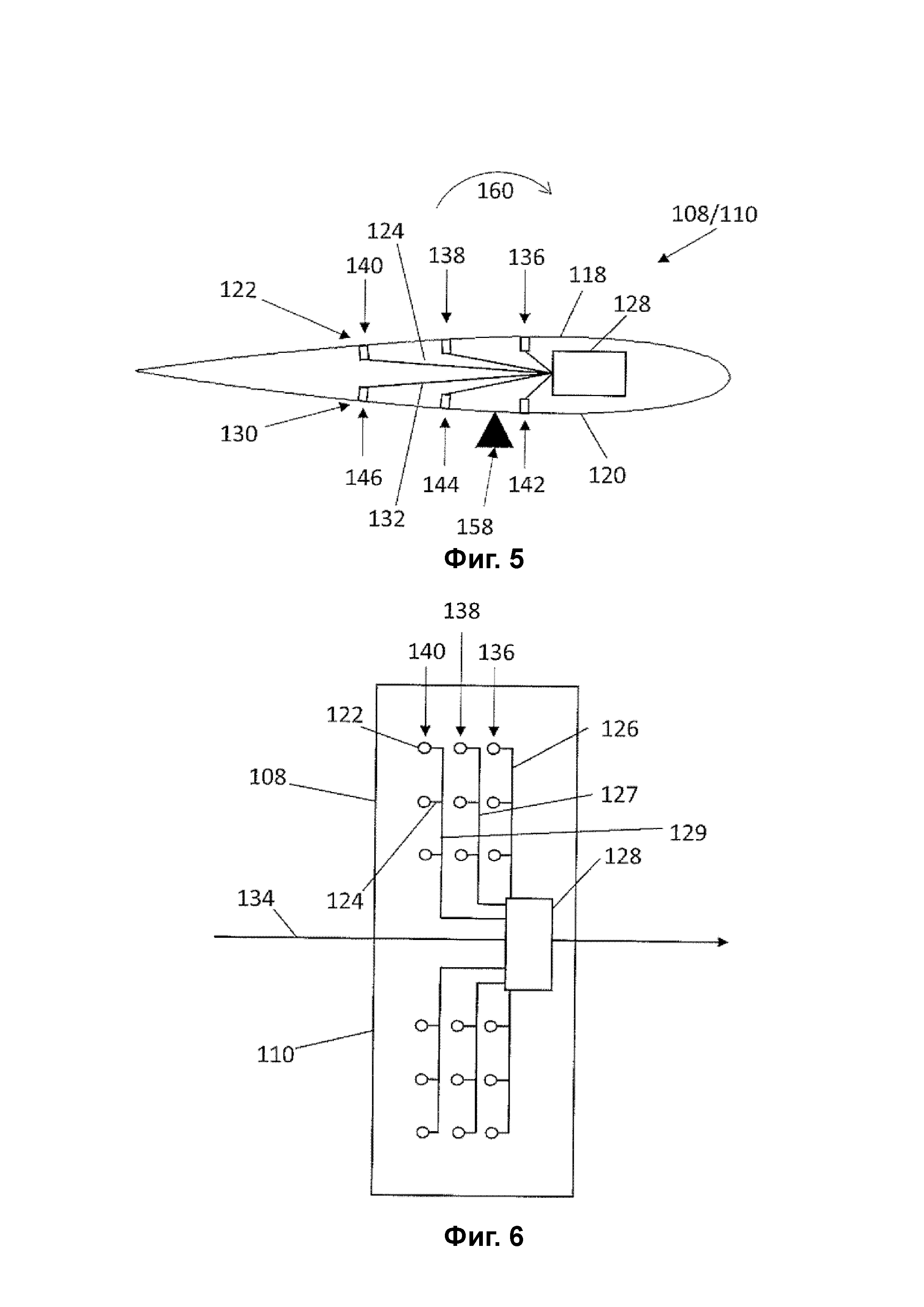
На фиг. 5 показан вертикальный разрез упрощенной иллюстрации плавучего средства на подводных крыльях для использования с водным плавучим средством в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 6 - вид сверху подводного крыла с фиг. 5;
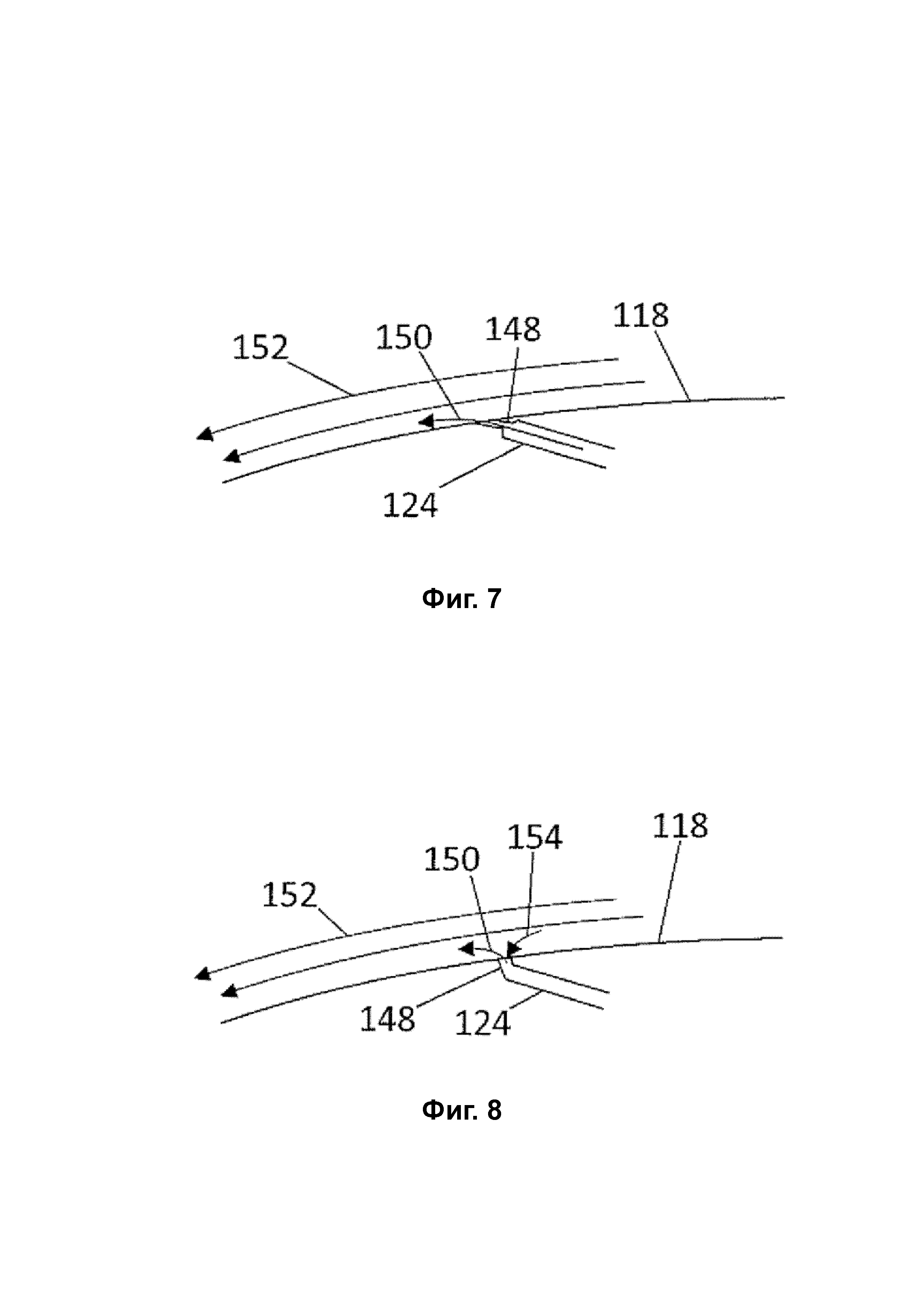
Фиг. 7 - подробный вид в разрезе, показывающий отверстие для использования с вариантом осуществления изобретения;
Фиг. 8 - детальный вид в разрезе, показывающий отверстие для использования с другим вариантом осуществления изобретения;
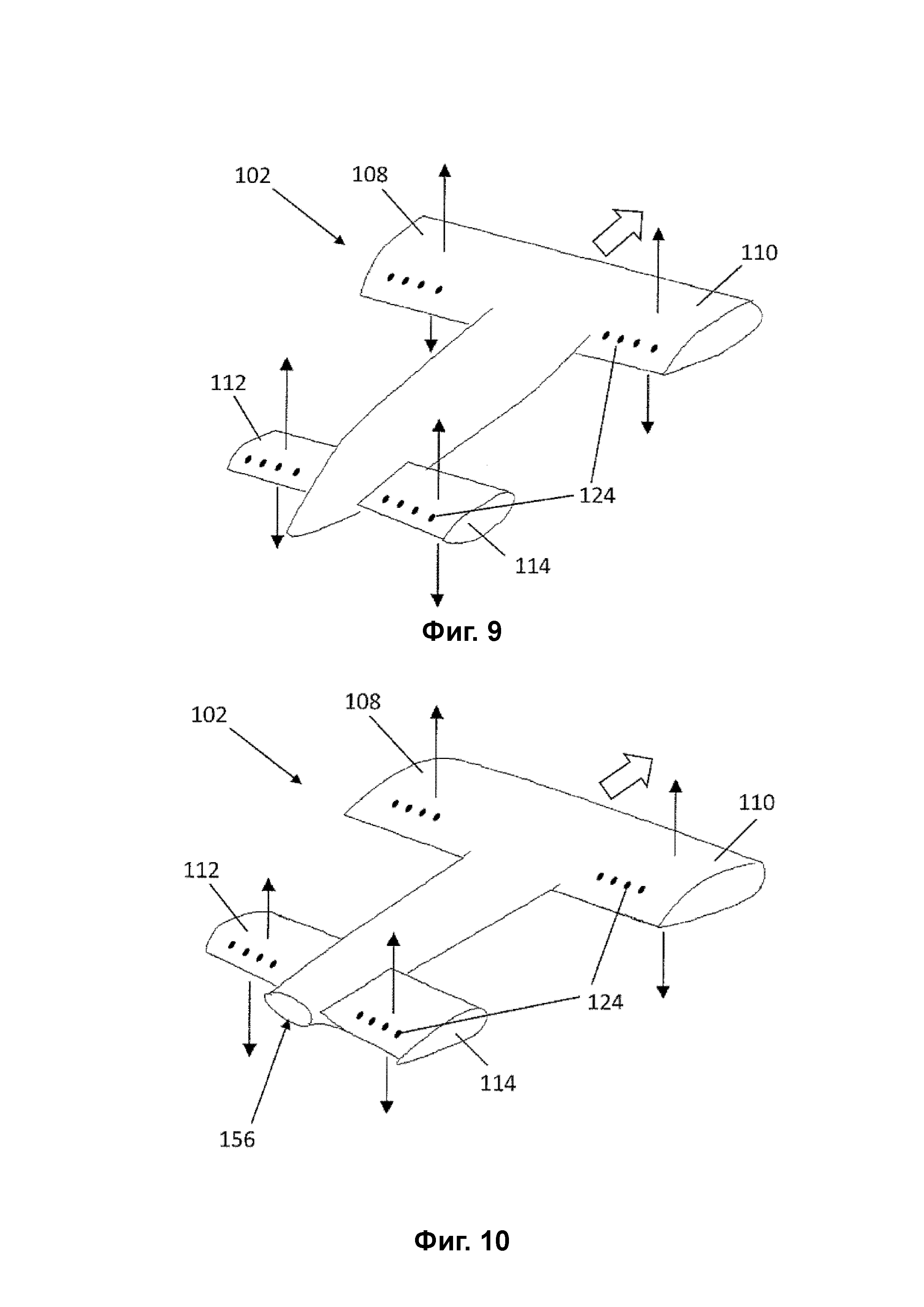
Фиг. 9 - перспективный вид сзади упрощенной иллюстрации плавучего средства на подводных крыльях для использования с водным плавучее средством в соответствии с дополнительным вариантом осуществления изобретения;
Фиг. 10 - перспективный вид сзади упрощенной иллюстрации плавучего средства на подводных крыльях для использования с водным плавучее средством в соответствии с еще одним вариантом осуществления изобретения;
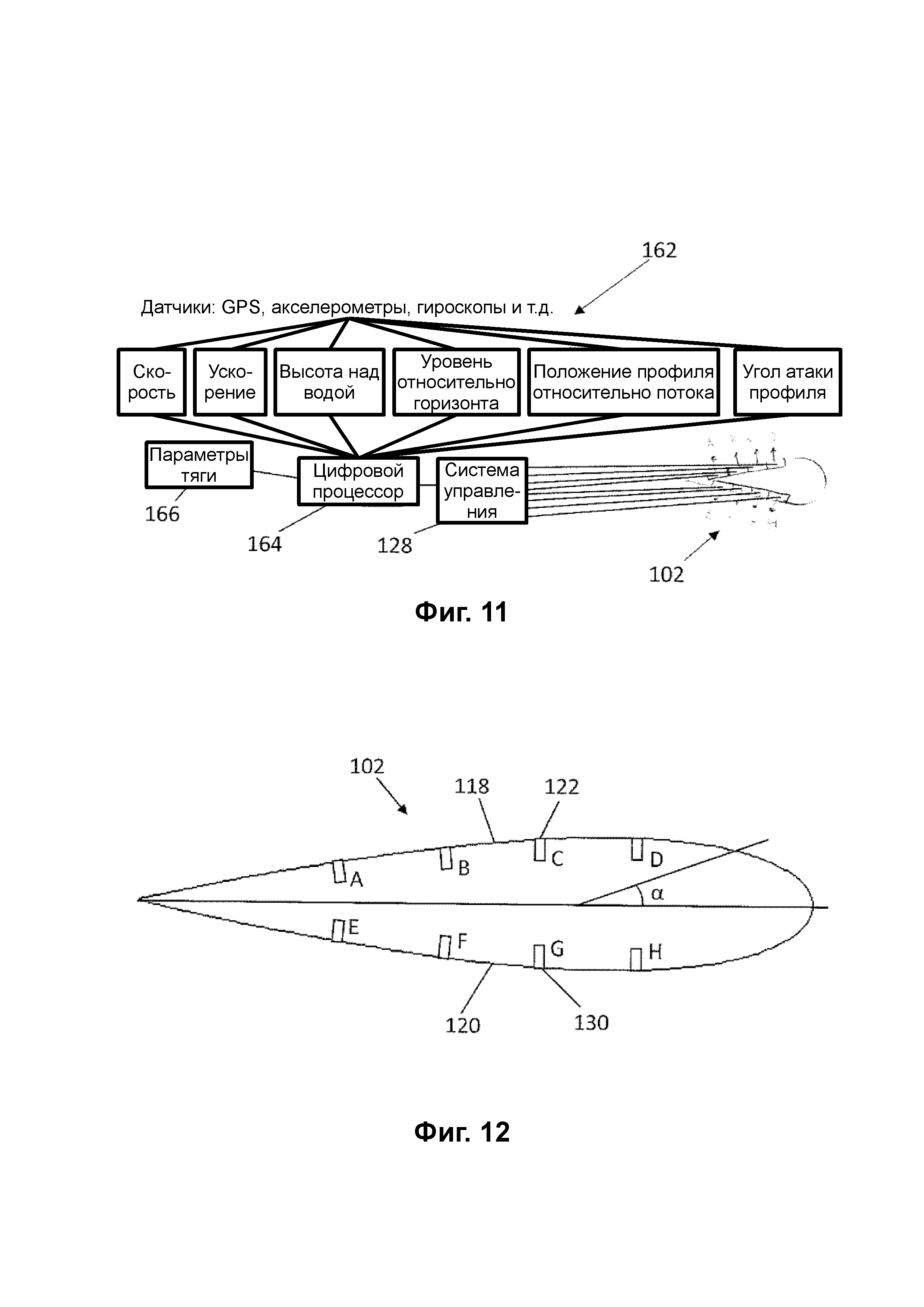
На фиг. 11 показана схема системы управления для использования с вариантом осуществления изобретения;
Фиг. 12 - вертикальное сечение подводного крыла в соответствии с еще одним вариантом осуществления изобретения;
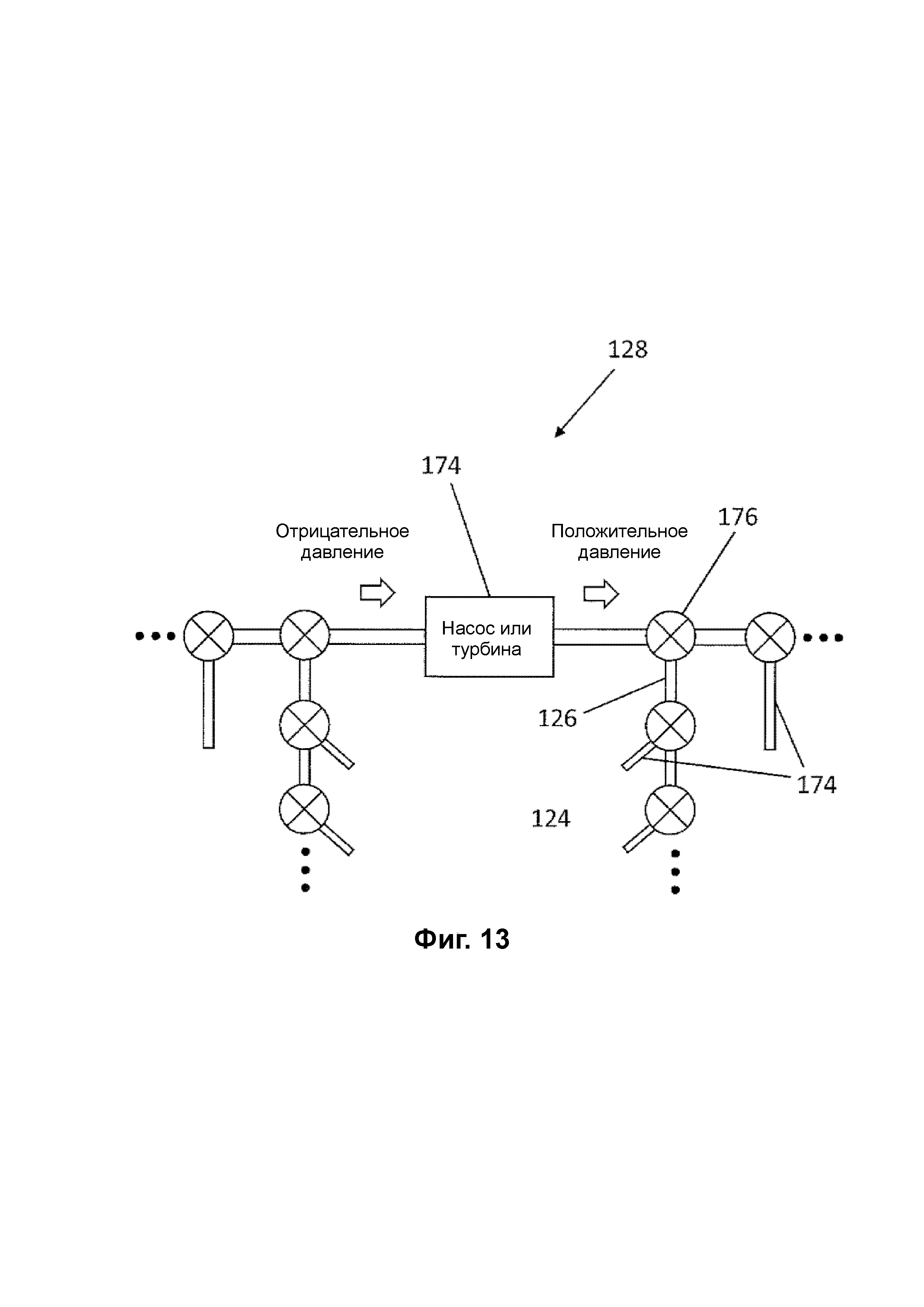
Фиг. 13 - схема клапанов и насоса для использования с вариантом осуществления изобретения; фиг. И
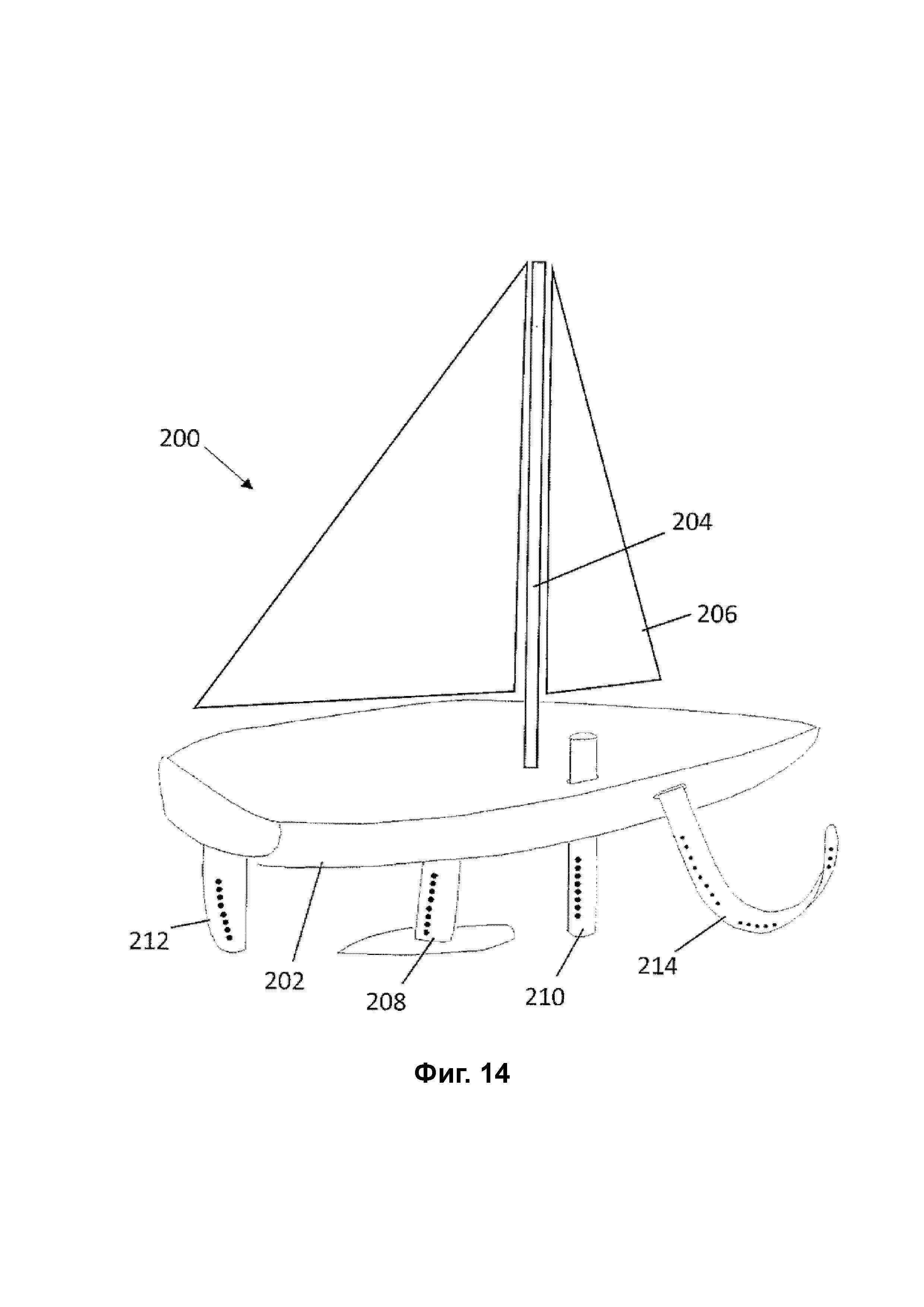
Фиг. 14 - перспективный вид сзади плавучего средства в форме парусной лодки в соответствии с дополнительным вариантом осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
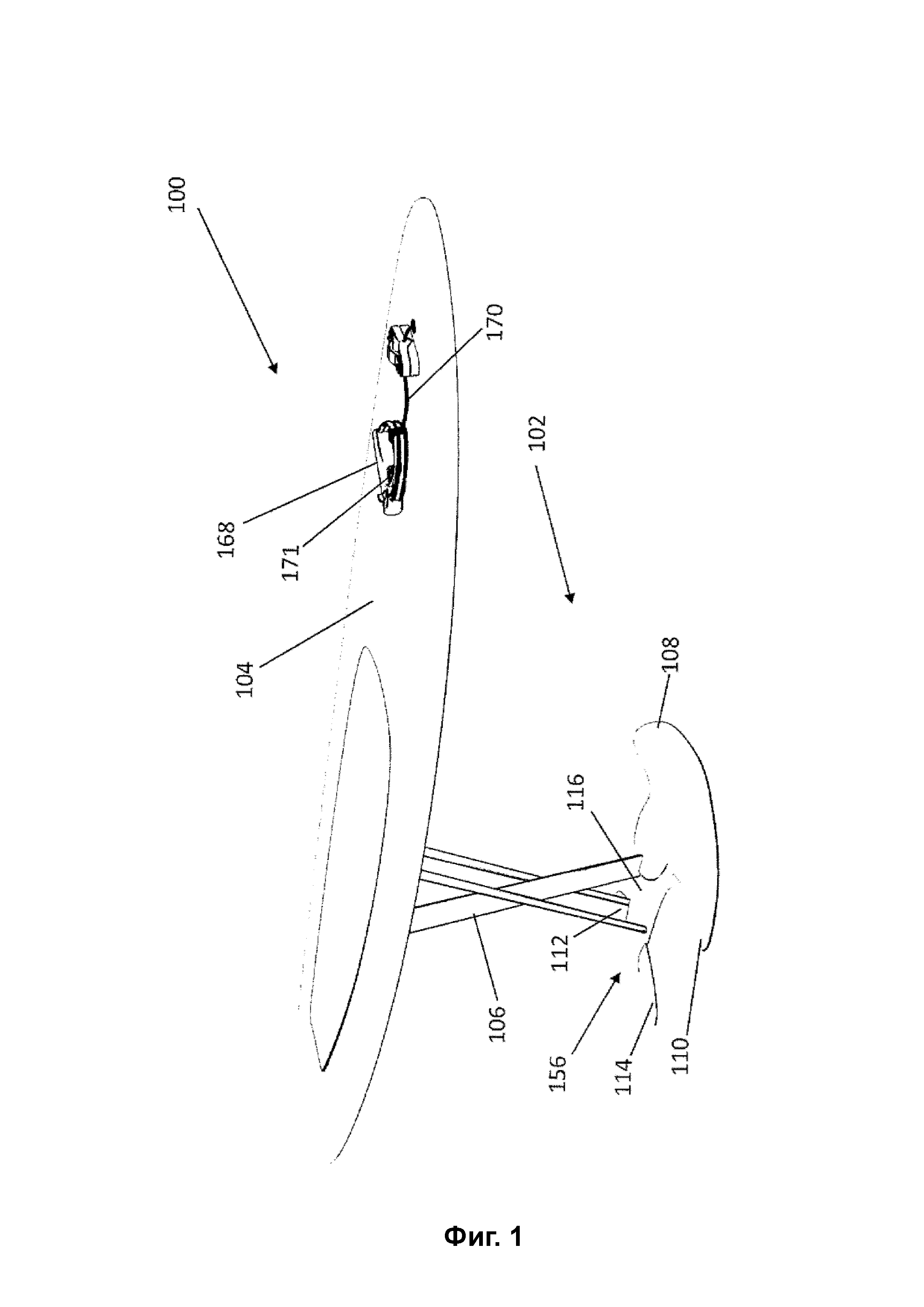
На чертежах, и, в частности, на фиг. 1 и 2, плавучее средство 100 содержит подводное крыло в форме блока подводных крыльев 102 и платформу 104. В этом варианте осуществления платформа 104 имеет физическую форму и формирует парусную доску. Платформа 104 установлена на подводном блоке 102 с помощью стоек 106. В проиллюстрированном варианте осуществления, стойки 106 принимают форму устройства в виде ножниц, которое обеспечивает относительно жесткое крепление между блоком 102 подводного крыла и платформой 104 при использовании, в то же время позволяя стойкам 106 складываться для удобства транспортировки и хранения. Плавучее средство 100 спроектировано таким образом, что при использовании подъемная сила, создаваемая подводным крылом 102, когда оно движется по воде, поднимает платформу 104 с поверхности воды. Блок 102 подводных крыльев содержит первую часть 108 на подводных крыльях, вторую часть 110 на подводных крыльях, третью часть 112 на подводных крыльях и четвертую часть 114 на подводных крыльях, причем все они проходят в боковом направлении от центрального корпуса 116. Первая часть 108 соединена со второй частью 110 подводных крыльев, а третья часть 112 подводных крыльев соединена с четвертой частью 114 подводных крыльев.
На фиг. 3 и 4 показано схематическое расположение первой и второй частей 108 и 110 подводных крыльев. Как показано на фиг.3, каждая из частей 108 и 110 подводных крыльев включает в себя первую поверхность в форме верхней поверхности 118 и вторую поверхность в форме нижней поверхности 120. В этом контексте «верхний» и «нижний» относятся к предполагаемой ориентации блока 102 подводных крыльев, когда плавучее средство 100 используется в воде. Верхняя поверхность 11 содержит несколько отверстий в форме верхних отверстий 122. Каждое из верхних отверстий 122 фактически представляет собой выход/вход, образованный в или на верхней поверхности 118. Каждое из верхних отверстий 122 сообщается по жидкости с соответствующим верхним каналом 124. В проиллюстрированном варианте осуществления верхние каналы 124 соединяются с верхним коллектором 126, который, в свою очередь, сообщается по текучей среде со средством управления в форме системы 128 управления.
Следует отметить, что в тех случаях, когда подводное крыло предназначено для использования в вертикальном положении (например, при применении в таких устройствах как парусная лодка, как описано ниже), «верхняя» и «нижняя» поверхности будут «левой» и «правой» поверхностями плавучего средства на подводных крыльях относительно направления движения плавучего средства. Ссылки на «верхнюю» и «нижнюю» в последующем описании также охватывают «левую» и «правую» поверхности, когда это имеет отношение к конкретному применению подводного крыла.
Нижняя поверхность 120 не показана в плане, но аналогична верхней поверхности 11. Нижняя поверхность 120 аналогично включает в себя несколько отверстий в форме нижних отверстий 130. Каждое из нижних отверстий 130 фактически представляет собой выход/вход, образованный в или на нижней поверхности 120. Каждое из нижних отверстий 130 сообщается по текучей среде с соответствующим нижним каналом 132. В проиллюстрированном варианте осуществления нижние каналы 132 соединяются с нижним коллектором 133, который, в свою очередь, сообщается по текучей среде с системой 128
управления. Хотя система 128 управления показана как находящаяся внутри блока 102 на подводных крыльях, любой или все компоненты системы 128 управления могут быть расположены в любой подходящей части плавучего средства 100.
В варианте осуществления, показанном на фиг. 1-4, плавучее средство 100 имеет продольную ось 134 в предполагаемом направлении движения через воду. Первая часть 108 на подводных крыльях смещена под углом вокруг продольной оси от второй части 110 на подводных крыльях. В проиллюстрированном варианте осуществления угловое смещение составляет 180°, в котором и первая часть 108 на подводных крыльях (подводных крыльев), и вторая часть 110 на подводных крыльях выровнены друг с другом и горизонтальной осью через блок 102 на подводных крыльях. Однако следует понимать, что угловое смещение может быть больше или меньше 180° в зависимости от конкретных характеристик производительности и стабильности, которые требуются в конкретном варианте осуществления.
Третья и четвертая части 11-12 и 11 на подводных крыльях могут включать в себя признаки, соответствующие тем, которые описаны со ссылкой на фиг.3 и 4, а описание фиг.3 и 4 относительно первой и второй частей 108 и 110 на подводных крыльях соответственно применимо к третий и четвертый участки на подводных крыльях 112 и 114.
Обращаясь к фиг.5 и 6, на которых аналогичные ссылочные позиции используются для указания общих признаков из других вариантов осуществления, показан альтернативный вариант осуществления блока 102 на подводных крыльях. В этом случае верхняя поверхность 11 первого участка 108 и второго участка 110 включает в себя первый ряд 136 верхних отверстий 122, второй ряд 138 верхних отверстий 122 и третий ряд 140 верхних отверстий 122, каждый из которых обеспечен питанием от соответствующих верхних коллекторов 126, 127 и 129. Аналогично, нижняя поверхность 120 первой части 108 и второй части 110 включает в себя первый ряд 142 нижних отверстий 130, второй ряд 144 нижних отверстий 130 и третий ряд 146 нижних отверстий 130, каждое из которых питается соответствующим нижним коллектором (не показан).
Система 128 управления описана более подробно ниже со ссылкой на фиг. 11 и 13, где вкратце, система 128 управления включает в себя клапаны, исполнительные механизмы и приводы исполнительных механизмов, которые обеспечивают подачу положительного и отрицательного давления жидкости в верхний коллектор(ы) 126, 127 и 129 и нижний коллектор(ы) 133. Система 128 управления управляется посредством средства в виде схемы 162 управления (более подробно описанной ниже), запрограммированной и сконфигурированной для определения количества жидкости, выталкиваемой из верхних отверстий 122 и нижних отверстий 130 (под «вытягиванием» или «отведением» жидкости в данном контексте подразумевается «всасывание» жидкости через отверстия/отверстия). Схема 162 управления также сконфигурирована для управления клапанами через исполнительные механизмы, которые приводятся в действие приводами привода, так что текучая среда избирательно выталкивается или протягивается через верхние отверстия 122 и нижние отверстия 130. Посредством управления тем, какие из верхних отверстий 122 и нижних отверстий 130 выталкивают или вытягивают жидкость, подводное крыло может создавать рыскание, наклон и/или крен, чтобы управлять плавучее средством 100 и/или повышать его эффективность.
В этом контексте «управление» может включать в себя предоставление управляющего входного сигнала. Специалист поймет, что управляющий вход не обязательно способен обеспечить полный управление при любых обстоятельствах. По аналогии, рулевое колесо автомобиля управляет автомобилем, но может быть менее эффективным на грунтовой дороге и совершенно неэффективным на ледяном пятне. Подобным образом, сила, создаваемая эффектом выталкивания или втягивания жидкости через отверстие (отверстия) описанных вариантов осуществления, может быть недостаточной, чтобы позволить пользователю (или системе управления) сохранять управление. Например, по крайней мере на скоростях, когда вода течет по подводному крылу относительно медленно, вода, проходящая через отверстия, может обеспечивать некоторую силу, но этой силы может быть недостаточно, например, для полной стабилизации плавучего средства. Тем не менее, вытеснение и/или вытягивание воды через отверстие (отверстия) все еще обеспечивает форму контроля. В показанных вариантах осуществления текучая среда, которая выталкивается или протягивается через отверстия, является текучей средой, в которой работает плавучее средство 100.
Например, текучая среда может вытягиваться через отверстие (не показано), которое обычно остается погруженным в воду (например, морскую воду или речную воду), через которую движется плавучее средство 100. Вода забирается через отверстие и затем подается в систему управления и/или тяги для жидкости, как более подробно описано ниже. Однако следует понимать, что рассматриваются и другие формы жидкости. Например, выхлопные газы из двигателя внутреннего сгорания (не показаны) и/или окружающий воздух могут смешиваться с водой, проходящей через отверстие.
Верхние отверстия 122 и нижние отверстия 130 могут принимать любую подходящую форму. Форма (в плане) отверстий и/или угол, который каждый верхний канал 124 и нижний канал 132 образует с соответствующей верхней поверхностью 118 и нижней поверхностью 120, могут быть выбраны, чтобы стимулировать любое конкретное желаемое гидродинамическое поведение(я). Если каналы 124/132 имеют круглое поперечное сечение и взаимодействуют с их соответствующими поверхностями 118/120, отверстия 122/130 могут быть, например, овальными в плане. Независимо от формы поперечного сечения трубопровода любое одно или несколько отверстий могут быть круглыми, овальными (с большой осью под любым подходящим углом относительно продольной оси плавучего средства), квадратными, прямоугольными, многоугольными или любой другой подходящей формы , Независимо от формы, он может иметь любое подходящее соотношение размеров, от относительно компактного до удлиненной прорези. Такие образования, как лопасти или направляющие, могут быть предусмотрены в одном или нескольких каналах и/или в одном или нескольких отверстиях или рядом с ними.
Каждый канал может иметь участок сходящегося или расходящегося продольного сечения, особенно вблизи и/или у соответствующего отверстия. Это может помочь ускорить или замедлить вытеснение жидкости. Если конкретное верхнее отверстие 122 или нижнее отверстие 130 используется только для вытеснения жидкости (то есть, он не использует всасывание), то соответствующий трубопровод может присоединиться к отверстию 122/130 под острым углом. На фиг. 7 показан пример такого верхнего трубопровода 124. Верхний канал 124 заканчивается соплом 148, которое ускоряет текучую среду 150, протекающую через него из верхнего канала 124. Острый угол, под которым жидкость 150 выталкивается в воду 152, текущую по верхней поверхности 118, способствует поддержанию ламинарного потока по верхней поверхности 11-18. Альтернативно или в дополнение, увеличенный поток жидкости по поверхности, вызванный впрыском, может снизить давление из-за эффекта Бернулли, как известно специалистам в данной области техники. Альтернативно или в дополнение, вытеснение жидкости через любое или верхние отверстия 122 и/или нижние отверстия 130 может увеличивать или уменьшать турбулентность, которая может уменьшать или увеличивать давление, как известно специалистам в данной области техники.
Любая комбинация этих принципов может, например, позволить увеличить угол атаки и/или улучшить реакцию на сваливание. Соответствующие принципы могут применяться в вариантах осуществления, где жидкость всасывается через одно или несколько верхних отверстий 122 и/или нижних отверстий 130.
Если конкретное верхнее отверстие 122 или нижнее отверстие 130 используется как для выталкивания, так и для всасывания жидкости, тогда соответствующий трубопровод может присоединиться к отверстию 122/130 под менее острым углом, под прямым углом или под обратным углом. На фиг. 8 показан пример такого верхнего трубопровода 124. Канал 124 и сопло 148 в этом случае расположены перпендикулярно верхней поверхности 11. По существу, вытесняемая текучая среда 150 выходит из сопла 148 нормально к воде, протекающей по верхней поверхности 118. Жидкость 154, которая протягивается через форсунку 148, аналогичным образом вытягивается со всех сторон вокруг форсунки, хотя вода будет иметь тенденцию преимущественно втягиваться впереди форсунки 148 из-за движения воды через форсунку 148. Специалист поймет, что угол, который каждый отдельный канал 124/132 образует со своей связанной поверхностью 118/120, может быть оптимизирован для его конкретной цели. Например, некоторые трубопроводы 124/132 могут использоваться только для вытеснения жидкости и, следовательно, могут образовывать острый угол со своими соответствующими поверхностями 118/120.
Другие трубопроводы 124/132 могут использоваться только для вытягивания жидкости и, следовательно, могут образовывать другой угол со своими соответствующими поверхностями 1 18/120. Тем не менее, другие трубопроводы 124/132 могут использоваться как для вытягивания, так и для вытеснения жидкости в разное время, и поэтому их углы могут быть компромиссом между идеальными характеристиками в каждом из двух режимов. Любая подходящая комбинация трубопроводов 124/132 может быть предоставлена в зависимости от применения. В дополнение к вытеснению и вытягиванию жидкости через отверстия, плавучее средство 100 может включать в себя механизм для продвижения корабля 100 через воду. Например, плавучее средство 100 может включать в себя один или несколько внешних гребных винтов (не показаны) спереди и/или сзади подводного крыла. Один или несколько внешних гребных винтов приводятся в движение электродвигателем, таким как электродвигатель (не показан), который питается от батареи (не показана) и/или от двигателя внутреннего сгорания (не показан). Плавучее средство также может приводиться в движение ветровой энергией, например, одним или несколькими парусами или воздушным змеем.
В других вариантах осуществления движение водного транспортного средства 100 может быть достигнуто путем использования одного или нескольких выпускных отверстий, отдельных от отверстий. Отверстия могут образовывать часть отдельного водоструйного узла, предназначенного для движения, или движение может быть полностью или частично обеспечено жидкостью, выталкиваемой одним или несколькими отверстиями. Например, на фиг. 9 показан вариант осуществления, в котором движущая сила обеспечивается внешними средствами (такими как водометная струя, пропеллер или энергия ветра, как описано в другом месте в этом описании). В качестве альтернативы, движение может быть обеспечено путем вытеснения жидкости из, по меньшей мере, некоторых из каналов 124/132. Выталкивание является достаточно мощным, что приводит к тому, что плавучее средство 100 движется по воде. В этом случае плавучее средство 100 может, по меньшей мере, частично управляться силой тяги, создаваемой текучей средой, выталкиваемой из одного или нескольких каналов 124/132. Это управление может быть в дополнение к управлению, обеспечиваемому выталкиванием и всасыванием жидкости через отверстия, так что гидродинамический отклик частей подводного крыла вызывает силу рыскания, крена и/или тангажа, как описано выше.
В других вариантах осуществления текучая среда, выталкиваемая из каналов 124/132 с целью приведения в движение плавучего средства 100, поддерживается относительно постоянной, и управление обеспечивается исключительно выталкиванием и всасыванием жидкости через отверстия, так что гидродинамический отклик частей подводного крыла вызывает усилие рыскания, крена и/или тангажа, как описано выше.
На фиг.10 (и фиг.1) показан вариант осуществления, в котором отдельный движительный канал 156 интегрирован с подводным крылом 102. В этом случае движительный канал 156 находится в задней части центрального корпуса 116, но в других вариантах может быть размещен в любом подходящем положении, в том числе отдельно от блока 102 на подводных крыльях. Приводной канал 156 может обеспечивать неконтролируемую тягу, причем управление обеспечивается только выталкиванием и всасыванием жидкости через отверстия, так что гидродинамический отклик частей подводного крыла вызывает силу рыскания, крена и/или тангажа, как описано выше. В других вариантах осуществления тяговый канал 156 может иметь вектор, подобный, например, струйному водомету. Как описано ниже, система управления может управлять векторизацией движительного канала совместно с выталкиванием и/или всасыванием жидкости через отверстия, чтобы, таким образом, управлять и стабилизировать плавучее средство 100.
В вариантах осуществления, описанных до настоящего времени, блок 102 на подводных крыльях включает в себя первую пару частей 108 и 110 на подводных крыльях и вторую пару частей 11 и 11 на подводных крыльях. В этой конструкции сила может создаваться путем управления вытеснением или втягиванием жидкости через одно или несколько отверстий таким образом, что на одной стороне продольной оси 134 обеспечивается больший подъем, чем на другой. Например, для конкретной скорости и угла атаки выталкивание жидкости через один или несколько верхних каналов 124 на первой части 108 подводного крыла приведет к меньшему ламинарному разделению на этой поверхности и, следовательно, к большей подъемной силе. В результате вокруг продольной оси 134 будет генерироваться сила качения, которую можно использовать для того, чтобы либо катить катер 100 (например, в поворот), либо обеспечить противодействие нежелательному крену (например, из-за отсутствия навыков пользователя).
Высота подъема может контролироваться аналогичным образом. В вариантах осуществления, описанных до настоящего времени, тангаж может регулироваться для конкретной скорости и угла атаки путем увеличения или уменьшения подъема, обеспечиваемого передней парой частей 108 и 11 на подводных крыльях, и/или уменьшения или увеличения подъема, обеспечиваемого задним ходом. пара судов на подводных крыльях 1 12 и 1 14. Величина подъема, обеспечиваемая каждой из передней пары и задней пары участков на подводных крыльях, может регулироваться в соответствии с любым из механизмов, описанных выше. Понятно, что управление по тангажу относится к разнице в подъеме, обеспечиваемой передней парой частей 108 и 110 на подводных крыльях, по сравнению с той, которая обеспечивается задней парой шкуры для частей 112 и 114. В большинстве сценариев оба комплекта будут обеспечивать подъемную силу, и это относительная величина подъемной силы, которая регулируется для обеспечения управления подачей вперед и назад.
Возвращаясь к варианту осуществления, показанному на фиг. 5 и 6, тангаж может регулироваться для конкретной скорости и угла атаки путем дифференциального вытягивания или выталкивания жидкости через первый ряд 136, второй ряд 138 и третий ряд 140 верхних отверстий 122, и первый ряд 142, второй ряд 144 и третий ряд 146 нижних отверстий 130.
Например, путем вытеснения жидкости из первого ряда 142 с относительно высокой скоростью, при вытеснении жидкости из третьего ряда с относительно низкой скоростью, частями подводного крыла может создаваться общая продольная наклонная сила. Высокая скорость вытеснения жидкости из первого ряда 142 обеспечивает тягу вниз в той точке, которая находится перед центром подъема 158. Одновременно низкий уровень вытеснения жидкости из третьего ряда 146 улучшает ламинарный поток и, следовательно, подъем в той точке, которая находится позади центра подъема 158. Поскольку первый ряд 142 обеспечивает направленную вниз силу, а третий ряд 146 обеспечивает направленную вверх силу, конечный результат представляет собой вращательную силу в направлении стрелки 160, которая обеспечивает управление шагом вперед.
Специалист поймет, что необязательно, чтобы блок 102 на подводных крыльях включал четыре отдельные части 102 на подводных крыльях, как показано в вышеупомянутых вариантах осуществления. Например, первая часть 108 на подводных крыльях и вторая часть 110 на подводных крыльях могут быть просто противоположными сторонами одного подводного крыла. Аналогичная структура может применяться к третьей части 11-12 плавучего средства на подводных крыльях и четвертой части 1 14 плавучего средства на подводных крыльях. В других вариантах осуществления подводное крыло может включать в себя только первую часть 108 на подводных крыльях и вторую часть 110 на подводных крыльях. В зависимости от положения и расположения отверстий на верхней и/или нижней поверхности участков 108 и 110 на подводных крыльях такие варианты осуществления могут позволять контролировать наклон, крен, рыскание или любую их комбинацию. По меньшей мере, некоторые из отверстий могут быть расположены в или рядом с точкой разделения потока одной или нескольких частей подводного крыла. Как описано выше, это может способствовать ламинарному потоку, что приводит к повышению эффективности подъема и улучшению характеристик сваливания.
Обращаясь к фиг. 11, здесь показана схема схемы 162 управления и связанных с ней компонентов. Система 162 управления может включать в себя цифровой процессор 164, который может принимать форму микроконтроллера общего назначения, содержащего процессор и память, инструкции программного обеспечения для хранения памяти, которые при исполнении реализуют способ управления плавучее средством, как описано здесь. Может быть включен один или несколько датчиков, каждый из которых сконфигурирован для подачи сигналов в цифровой процессор 164. Неполный список таких датчиков включает в себя:
Один или несколько акселерометров для определения поступательного и/или вращательного положения и/или движения плавучего средства 100.
Один или несколько датчиков скорости воды для определения скорости плавучего средства по отношению к воде.
Один или несколько датчиков угла для определения угла атаки блока 102 на подводных крыльях относительно воды.
Один или несколько датчиков угла для определения уровня плавучего средства относительно горизонтали. • Один или несколько датчиков высоты для определения высоты платформы 104 над водой.
Один или несколько датчиков для определения направления потока над одной или несколькими поверхностями плавучего средства на подводных крыльях. На направление потока может влиять, например, рыскание. Например, если есть отклонение вправо, подводное крыло будет двигаться через воду под углом, который может быть измерен путем определения углового направления потока жидкости над подводным крылом (или одной или несколькими частями подводного крыла).
Один или несколько датчиков давления для определения давления жидкости, включая давление жидкости на поверхности или рядом с ней, внутри одного или нескольких трубопроводов и/или внутри любого другого компонента, связанного с выталкиванием или вытягиванием жидкости из трубопроводов, и/или тяговый канал там, где это предусмотрено.
Один или несколько блоков определения местоположения GPS.
Один или несколько гироскопов для определения поступательного и/или вращательного положения и/или движения плавучего средства 100.
Параметры тяги 166 могут быть предоставлены, например, от дросселя. Дроссель может быть предусмотрен, например, на отдельном контроллере, который можно привязать к запястью или руке пользователя и использовать для управления скоростью плавучего средства 100.
Примером такого контроллера является рукоятка 168 на фиг. 1. Рукоятка 168 прикреплена к платформе 104 с помощью ремня 170, за который пользователь может держаться, чтобы стабилизировать себя при использовании плавсредства 100. Набор проводов управления (не показан) встроен в ремешок 170 и передает управляющие сигналы от дросселя 171, управляемого пальцем, на цифровой процессор 164. В альтернативных вариантах осуществления сигналы управления тягой отправляются беспроводным способом через беспроводной интерфейс (не показан). Тяга также может полностью или частично контролироваться движением пользователя. Например, в частности, когда плавучее средство 100
находится в движении, наклон вперед может интерпретироваться как запрос на большую скорость, тогда как наклон назад может интерпретироваться как запрос на меньшую скорость. Величину и/или скорость наклонов вперед/назад можно интерпретировать, чтобы определить, является ли управление скоростью вероятной предполагаемой целью наклонения.
Например, быстрый наклон вперед, за которым следует наклон назад, можно интерпретировать как начало трюка, а не как попытку быстро ускориться и затем замедлиться. Тяга может контролироваться любой комбинацией движения контроллера и пользователя. Другие формы управления тягой будут очевидны для специалистов в данной области техники.
Цифровой процессор 164 подключен к системе управления 128. Компоненты системы управления 128 показаны на фиг. 13. Система 128 управления включает в себя насос 174 и клапаны 176. Клапаны 176 открываются и закрываются исполнительными механизмами (не показаны), которые действуют под управлением цифрового процессора 164 (управляющие соединения не показаны для ясности), чтобы управлять потоком жидкости в и из коллекторов (например, верхний коллектор 126) и трубопроводов (например, верхние протоки 124). Клапаны 176 могут быть цифровыми в том смысле, что они могут иметь только «открытое» или «закрытое» состояние. Альтернативно, клапаны могут управляться пропорциональным образом, чтобы модулировать поток жидкости через них.
Насос может быть одним насосом, который подает жидкость как под положительным, так и отрицательным давлением, или могут быть предусмотрены отдельные насосы для положительного и отрицательного давления. В еще других вариантах осуществления подается только положительное давление или отрицательное давление.
В проиллюстрированном варианте осуществления клапаны 176 слева от насоса 174 выполнены с возможностью избирательного подключения к отрицательному давлению посредством их соответствующих клапанов 174. Когда соответствующие клапаны открыты, отрицательное давление втягивает воду через коллектор 126, каналы 124 и открытые клапаны 176 в направлении насоса. Это имеет эффект, описанный в другом месте в этом описании. Клапаны справа от насоса 174 выполнены с возможностью избирательного подключения к положительному давлению посредством соответствующих клапанов 176.
Когда соответствующие клапаны открыты, положительное давление выталкивает воду из насоса 174 через коллектор 126, трубопроводы 124 и открытые клапаны.
В некоторых вариантах осуществления один или несколько клапанов могут быть выполнены
с возможностью избирательного соединения одних и тех же трубопроводов с положительным или отрицательным давлением, как требуется. В других вариантах осуществления каждый канал может быть только выборочно обеспечен положительным или отрицательным давлением. В еще других вариантах осуществления может быть предоставлена смесь этих альтернатив.
Проиллюстрированные клапаны являются лишь одним примером, показывающим подмножество клапанов для конкретного варианта осуществления. Только в качестве примера, конкретный клапан в конкретном варианте осуществления может управлять подачей:
положительное давление непосредственно на трубопровод;
Положительное давление на коллектор;
отрицательное давление непосредственно в трубопроводе;
отрицательное давление на коллектор;
положительное и отрицательное давление непосредственно на трубопровод;
положительное и отрицательное давление на коллектор. Конкретные варианты осуществления могут использовать любое одно или несколько таких устройств подачи клапана.
Насос может принимать любую подходящую форму. Например, насос может содержать двигатель, который приводит в движение рабочее колесо. Двигатель может быть двигателем внутреннего сгорания, электродвигателем или их гибридом. Электродвигатель может питаться от батареи. Электродвигатель также может приводиться в действие ветровой турбиной.
Цифровой процессор 164 запрограммирован для приема входных сигналов от различных датчиков и контроллера тяги. Из этих входов цифровой процессор 164 определяет вероятное намерение пользователя и преобразует его в набор управляющих сигналов для тяги и управления. Например, если входные данные предполагают, что плавучее средство 100 в настоящее время находится в состоянии покоя, и пользователь открывает дроссель, цифровой процессор 164 определит, что пользователь хочет, чтобы плавучее средство 100 переместилось вперед. В этом случае цифровой процессор 164 будет управлять различными исполнительными механизмами и рабочим колесом, чтобы обеспечить прямую тягу. В то же время жидкость будет вытесняться и/или вытягиваться из различных отверстий, что требуется для обеспечения устойчивости плавучего средства 100, когда оно начинает двигаться. Если, например, цифровой процессор 164 определяет из входных данных, что пользователь слегка отклоняется назад, жидкость может быть вытеснена и/или вытянута через одно или несколько отверстий, чтобы обеспечить управление прямым шагом, которое будет иметь тенденцию противодействовать эффект откинувшегося назад пользователя.
Точно так же, если небольшое наклонение в одну сторону обнаружено на низкой скорости (например, когда плавучее средство 100 только начинает двигаться), жидкость может быть вытеснена и/или протянута через одно из отверстий, чтобы обеспечить силу крена, стремящуюся к противодействовать худой Напротив, если небольшое наклонение в одну сторону обнаруживается на более высокой скорости, цифровой процесс 164 может интерпретировать это как начало поворота. В этом случае жидкость может быть вытеснена и/или вытянута через одно или несколько отверстий для стабилизации плавсредства 100 и/или повышения эффективности поворота. В этом отношении могут применяться принципы, которые будут применяться к управлению рысканием, тангажем и/или креном на летательном аппарате, с модификациями для учета различий, обусловленных средой, через которую движется подводное крыло, и расположением различных участков подводного крыла. 108-1 14.
Цифровой процессор 164 может определять скорость, с которой выталкивать или вытягивать жидкость через каждое отверстие, на основании, например, любого одного или нескольких из:
угол атаки по меньшей мере одной из частей на подводных крыльях;
скорость движения плавучего средства на подводных крыльях;
Угол тангажа плавучего средства; • угол крена плавучего средства;
угол рыскания плавучего средства; и
скорость изменения любого одного или нескольких из угла атаки по меньшей мере одной из частей плавучего средства на подводных крыльях, водной скорости плавучего средства на подводных крыльях, угла поворота плавучего средства, угла наклона плавучего средства и угла крена плавучего средства гидроциклов.
Затем жидкость может быть вытеснена и/или вытянута в соответствии с определенной скоростью.
Вытеснение и/или вытягивание жидкости через одно или несколько отверстий можно контролировать, чтобы улучшить, например, любое одно или несколько из следующего:
устойчивость плавучего средства;
энергоэффективность плавучего средства; и
эффективность поворота плавучего средства. Примеры того, как выталкивание и вытягивание жидкости через отверстия можно использовать для управления блоком 102 на подводных крыльях, теперь будут описаны со ссылкой на фиг.12, на которой одинаковые ссылочные позиции используются для указания общих признаков из других вариантов осуществления. Верхняя поверхность 118 имеет первый ряд A, второй ряд B, третий ряд C и четвертый ряд D верхних отверстий 122. Нижняя поверхность 120 имеет первый ряд E, второй ряд F, третий ряд G и четвертый ряд H нижних отверстий 130. Подводное крыло 102 имеет угол атаки а.
При низкой скорости и умеренном положительном угле атаки a положительное давление прикладывается через ряд E (то есть жидкость выталкивается через отверстия ряда E), в то время как умеренное отрицательное давление прикладывается через ряды C и D (то есть жидкость вытягивается через отверстия рядов C и D), что приводит к увеличению общего подъема.
При низкой скорости и большом положительном угле атаки a большое положительное давление прикладывается через ряды E и F, а умеренное положительное давление - через ряды C и D, что стабилизирует плавучее средство.
При крейсерской скорости и нейтральном угле атаки a через ряды C и D прикладывается умеренное отрицательное давление, что приводит к снижению общего сопротивления.
При высокой скорости и нейтральном угле атаки a большое положительное давление прикладывается через ряды C и D и G и H, что приводит к снижению общего подъема. Специалист поймет, что другие комбинации положительных и/или отрицательных давлений, приводящие к соответствующему вытеснению или всасыванию жидкости через соответствующие ряды, обеспечат дополнительные варианты для улучшения управления, стабильности и/или эффективности блока 102 на подводных крыльях.
В альтернативных вариантах осуществления подводное крыло может поддерживать грузовую платформу для переноса грузов, более тяжелых, чем человек. Например, большое плавучее средство с подводным крылом в соответствии с вариантом осуществления изобретения может включать грузовую платформу для перевозки, например, крупных грузовых предметов. Плавучее средство меньшего размера с подводным крылом согласно варианту осуществления изобретения может включать в себя грузовую платформу для переноса, например, более мелких предметов. В любом случае грузовая платформа может принимать форму простой плоской платформы, на которой можно размещать и удерживать грузы, или может принимать форму полностью или частично открытого корпуса, внутри которого может
быть размещен груз, или внутри которого один или несколько люди могут быть транспортированы. В еще других вариантах осуществления грузовая платформа может принимать форму одного или нескольких креплений для оборудования. Например, крепление камеры может позволить установить кардан для стабилизированной камеры. Такое расположение позволяет камере снимать видео или фотографические изображения либо автоматически, либо под контролем оператора камеры.
В любом случае, камера может эксплуатироваться оператором, который также находится на водном транспортном средстве, или может работать дистанционно.
Обращаясь к фиг. 14, показан парусный катер в форме парусной лодки 200. Парусная шлюпка 200 содержит корпус 202, мачту 204 и паруса 206. Как правило, парусная лодка включает в себя, по меньшей мере, одну вертикально простирающуюся подводную крылу, чтобы противостоять поперечной силе, приложенной к корпусу 202 из-за воздействия ветра на паруса 206. В отсутствие некоторых таких судов на подводных крыльях корпус 202 будет стремиться скатываться по воде, а не двигаться вперед через нее.
Блок на подводных крыльях может принимать форму любого одного или нескольких из киля 208, доски 210 кинжала, руля 212 и периферийных подводных крыльев 214. Хотя показанный парусник 200 включает в себя все это, в большинстве случаев парусник будет иметь только один, два или три из этих элементов. Принципы изобретения теперь будут описаны со ссылкой на киль 208. Понятно, что подобные принципы могут применяться к любому или ко всем другим элементам.
Киль 208 может включать в себя одно или несколько отверстий 216, образованных на левой и правой поверхностях киля (которые соответствуют верхней и нижней поверхностям ранее описанных вариантов осуществления). Каждое отверстие может иметь форму отверстия 218, которое может быть аналогичным любому из отверстий 122/130, описанных выше в отношении других вариантов осуществления. Каждое отверстие 218 соединено с трубопроводом 124/132, который снова может быть аналогичен описанному выше в отношении других вариантов осуществления. Хотя в варианте осуществления на фиг.11 показаны четыре отверстия 218, это сделано только для ясности. В практических применениях предусмотрено, что может быть предусмотрено большее количество отверстий. Отверстия 218 могут быть расположены рядами, как описано выше в отношении других вариантов осуществления, или могут быть расположены любым другим подходящим способом. Концентрация отверстий 218 может варьироваться по длине киля 208. Например, из-за эффекта рычага может быть желательно обеспечить больший управление над нижней частью 220 киля 208, так как это будет иметь тенденцию создавать большую силу, чем то же количество давления, приложенного ближе к корпусу 202.
При использовании, цифровой процессор, который может быть аналогичен описанному выше в отношении варианта осуществления, используется для управления тем, сколько жидкости выталкивается или всасывается через каждое отверстие 218. Как правило, жидкость будет вытесняться или протягиваться через каждое отверстие таким образом, чтобы создавать подъемную силу. В этом контексте «подъемная сила» означает силу, направленную нормально через поверхность киля 208. Поскольку парусная лодка 200 и киль 208 симметричны, подъем не будет производиться, если направление движения парусной шлюпки 200 в воде не находится под углом к продольному направлению корпуса
202. Подъем может быть произведен путем выталкивания и/или вытягивания жидкости через отверстия 218, как описано выше в отношении других вариантов осуществления. Подъемная сила может создаваться с целью противодействия вращающей силе, приложенной к корпусу из-за воздействия ветра на паруса 206.
Нежелательный подъем может также возникать во время прихватывания, так как угол атаки киля 208 изменяется под воздействием руля 212. Вытесняя или вытягивая жидкость через одно или несколько отверстий 218 во время поворота, этот нежелательный подъем может быть уменьшен, что может повысить эффективность поворота, а также уменьшить нежелательный крен парусной шлюпки 200.
Специалист в данной области поймет, что аналогичные функциональные возможности могут быть применены к любой одной или более из доски 210 кинжала, руля 212 и периферийных подводных крыльев 214 вместо или в дополнение к килю 208. Если подводное крыло находится впереди и/или сзади, его можно использовать для создания рыскания. Например, руль 212 может принимать форму вертикально проходящего плавучего средства на подводных крыльях. Управляя количеством воды, выталкиваемой или вытягиваемой через одно или несколько отверстий с каждой стороны руля 212, можно использовать усилие рыскания для обеспечения рулевого управления. В зависимости от реализации это может быть дополнением к рулевому управлению, обеспечиваемому поворотом руля известным способом.
Давление жидкости, необходимое для выталкивания или всасывания жидкости через отверстия 218, может быть обеспечено любым подходящим способом. Например, двигатель может использоваться для питания рабочего колеса. Двигатель может быть двигателем внутреннего сгорания, электродвигателем или их гибридом. Электродвигатель может питаться от батареи. Электродвигатель также может приводиться в действие ветровой турбиной. Это имеет полезный эффект, заключающийся в обеспечении большей мощности при более сильном ветре, когда может быть более полезным контролировать подъемную силу, обеспечиваемую килем 208.
Хотя было описано ветроэнергетическое плавучее средство в форме парусной шлюпки 200, предусмотрены другие виды ветроэнергетики и ветроэнергетические суда. Например, вместо одного или нескольких парусов ветроэнергетическое плавучее средство может оснащаться одним или несколькими воздушными змеями в качестве альтернативы или в дополнение к одному или нескольким парусам. Ветроэнергетическое плавучее средство может принимать форму парусного плавучего средства, доски для виндсерфинга, доски для кайт-серфинга, парусной шлюпки,
яхты, скифа или любой другой формы ветроэнергетического плавучего средства. Такое плавучее средство может включать подводное крыло для подъема корпуса или платформы над водой и/или горизонтальное подводное крыло, как описано выше в отношении парусной лодки 200. Хотя различные варианты осуществления были описаны с отдельными вертикальными и горизонтальными судами на подводных крыльях, следует понимать, что плавучее средство может включать в себя как вертикальные, так и горизонтальные суда на подводных крыльях. Кроме того, наклонное, изогнутое и/или изогнутое подводное крыло может создавать как вертикальные, так и горизонтальные составляющие силы. Относительно всех вариантов осуществления отверстия могут принимать любую подходящую форму.
Например, по меньшей мере, некоторые из отверстий могут иметь форму сопла, которое проходит от поверхности блока 102 на подводных крыльях. Отверстие может открываться в один или несколько каналов и/или иметь выходной сигнал, направленный одной или несколькими лопастями. Одно или несколько отверстий могут иметь форму прорези, такой как боковая прорезь, которая проходит вдоль части подводного крыла.
Если на поверхности предусмотрено более одного отверстия, их не нужно размечать рядами, как показано в некоторых вариантах осуществления выше. Отверстия могут быть расположены по любому подходящему рисунку, который обеспечивает требуемую производительность. Например, для улучшения управления вращением может быть желательно иметь более высокую плотность отверстий на внешних концах подводного крыла, поскольку улучшенный рычаг может увеличить доступный управление. Продольно
смещенные апертуры могут быть смещены в поперечном направлении относительно друг друга, чтобы уменьшить их взаимное влияние, например, из-за турбулентности.
Необязательно, дополнительное управление может быть обеспечено посредством подвижных поверхностей управления, которые могут включать в себя, например, закрылки, элероны, лифты и/или спойлеры.
Необязательно, цифровой процессор 164 может работать в разных режимах, чтобы соответствовать навыкам и намерениям пользователя. Например, режим «новичок» может максимизировать стабильность за счет эффективности и/или управляемости.
«Экспертный» режим, с другой стороны, может обеспечить большую управляемость за счет стабильности, что может быть приемлемо для опытного пользователя.
В любом варианте осуществления плавучее средство может быть автономным или полуавтономным. Например, плавучее средство с грузовой платформой может быть способно ориентироваться в пункте назначения доставки, в который должен быть выгружен груз. Водный корабль, несущий камеру, может следовать заданным путем или определять свой собственный путь, чтобы получить требуемое видео или фотографии. Автономное или полуавтономное плавучее средство обычно требует определенных средств для определения его местоположения. Это может принимать форму, например, блока GPS и/или какой-либо инерциальной системы навигации, включая, например, один или несколько гироскопов и/или акселерометров.
Упоминаемое здесь «количество» жидкости следует понимать как охватывающее любую подходящую единицу. Например, в зависимости от варианта осуществления количество жидкости может включать в себя давление, при котором жидкость выталкивается или протягивается через отверстие (отверстия), скорость потока (например, в литрах/секунду), скорость потока (например, в метрах)./второй) и/или любая комбинация этих единиц.
Количество может быть определено и реализовано непосредственно (например, определено и создано определенное давление) или косвенно (например, определена скорость потока, а затем преобразовано в процент давления и/или открытия клапана, так что создается определенная скорость потока). в апертуре (ах)). Хотя изобретение было описано со ссылкой на ряд конкретных неисчерпывающих и неограничивающих вариантов осуществления, специалист в данной области поймет, что изобретение может быть воплощено во многих других формах.
Реферат
Изобретение относится к области судостроения и касается плавучих средств с подводным крылом. Предложен способ управления плавучим средством, содержащим, по меньшей мере, одно подводное крыло, по меньшей мере, одно подводное крыло содержит одно или несколько отверстий на его первой и/или второй поверхности. Определяется количество жидкости, которая выталкивается или всасывается, по меньшей мере, в одно из одного или нескольких отверстий. Жидкость выталкивается или вытягивается через, по меньшей мере, одно из нескольких отверстий в соответствии с определенным значением, тем самым изменяя и/или создавая подъемную силу, рыскание, наклон и/или силу крена на подводном крыле, чтобы управлять плавучим средством. Раскрыто также соответствующее плавучее средство, имеющее подводное крыло, отверстия и средства управления. В варианте осуществления могут быть улучшены стабильность, эффективность использования энергии и/или эффективность поворота плавучего средства. Другие варианты осуществления содержат ветроэнергетическое плавучее средство, в котором силе крена, вызванной действием ветра, например, на один или несколько парусов или воздушных змеев, противодействует подводное крыло. 2 н. и 31 з.п. ф-лы, 14 ил.
Комментарии