Активное приспособление для движения по воде в виде киля и его варианты - RU2570924C1
Код документа: RU2570924C1
Чертежи

Описание
Изобретение относится к области водного транспорта и может быть использовано преимущественно при создании и модернизации индивидуальных средств передвижения, например, досок для серфинга, SUP и др.
Известен привод доски для серфинга, содержащий опору и двигатель в виде двух водометов, расположенных на нижней поверхности опоры с возможностью погружения в опору при выключении движителя (см. пат. США 2014134900, В63Н 11/02, 15.05.2014).
Недостатком известного устройства является отсутствие возможности спокойного движения по водной поверхности, необходимость непрерывно балансировать, особенно при волнении.
Наиболее близким к предложенному является активный руль (плавник) индивидуального плавательного средства, выполненный с возможностью съемного закрепления на плавательном средстве, снабженный встроенным движителем и пультом управления (см. пат. США 2003167991, В63В 35/7926, 2003).
Таким образом, известно активное приспособление для движения по воде, содержащее корпус со встроенным двигателем и пультом, закрепляемое на индивидуальном плавательном средстве и позволяющее последнему передвигаться в управляемом режиме по водной поверхности.
Однако и данному устройству присущ вышеназванный недостаток: его функциональные возможности, его сфера применения ограничены кратковременным движением, оно не позволяет в полной мере управлять устойчивостью плавательного средства.
Техническим результатом, ожидаемым от использования изобретения, является обеспечение устойчивости плавательного средства в любых условиях, в том числе при медленном движении и в покое, возможность управления степенью устойчивости, а также расширение функциональных возможностей плавательного средства, на котором активный киль установлен стационарно или закреплен временно.
Указанный результат достигается тем, что в активном приспособлении для движения по воде, содержащем корпус со встроенным движителем, корпус выполнен в виде киля, в полости которого расположен реверсивный поперечный относительно заданного направления движения плавательного средства движитель.
Указанный результат достигается также тем, что в активном приспособлении для движения по воде, содержащем корпус со встроенным движителем, корпус выполнен в виде киля, на котором установлены, по меньшей мере, два движителя, направленные под прямым или тупым углом к заданному направлению движения плавательного средства.
Кроме того, приспособление может быть снабжено средствами автоматического управления движителями в виде пульта управления с контроллером и датчиком наклона, подключенным к информационному входу контроллера, выход которого соединен со входами управления движителями.
При этом контроллер может быть выполнен с возможностью изменения с пульта управления коэффициента передачи канала датчик наклона - движитель.
Кроме того, алгоритм и/или степень изменения коэффициента передачи канала датчик наклона - движитель может рассчитываться с учетом внешних условий, гидродинамики плавательного средства, положения центра тяжести оператора и выбранного им режима.
При этом устройство может быть снабжено заслонками, установленными с возможностью отведения струи, созданной движителями, в направлении, обратном заданному направлению движения плавательного средства.
Кроме того, задняя и/или нижняя часть киля может быть выполнена гибкой.
При этом киль может быть выполнен с нижними лепестками, на которых соответственно размещены, по меньшей мере, два движителя и которые выполнены с возможностью их фиксации в наклонном или горизонтальном положении.
Кроме того, киль может быть выполнен с боковыми пластинами, на которых установлены соответствующие движители.
И, наконец, устройство может быть снабжено, по меньшей мере, одной полостью, выполненной с возможностью контролируемого заполнения водой или воздухом и расположенной в корпусе киля.
Таким образом, существо предложенного решения заключается в том, что на плавательном средстве устанавливается киль, сам по себе обеспечивающий повышение устойчивости, при этом дополнительно киль выполняется активным, то есть в значительно большей мере обеспечивающим устойчивость за счет того, что в нем или на нем располагаются движители, создающие поперечное управляемое усилие, вектор которого может быть направлен перпендикулярно направлению движения плавательного средства и лежать ниже поверхности воды, так что создается момент, компенсирующий крены.
На фиг. 1 представлен вариант приспособления с одним реверсивным движителем, расположенным в полости киля поперечно. На фиг. 2 схематично изображен вариант с двумя накладными движителями.
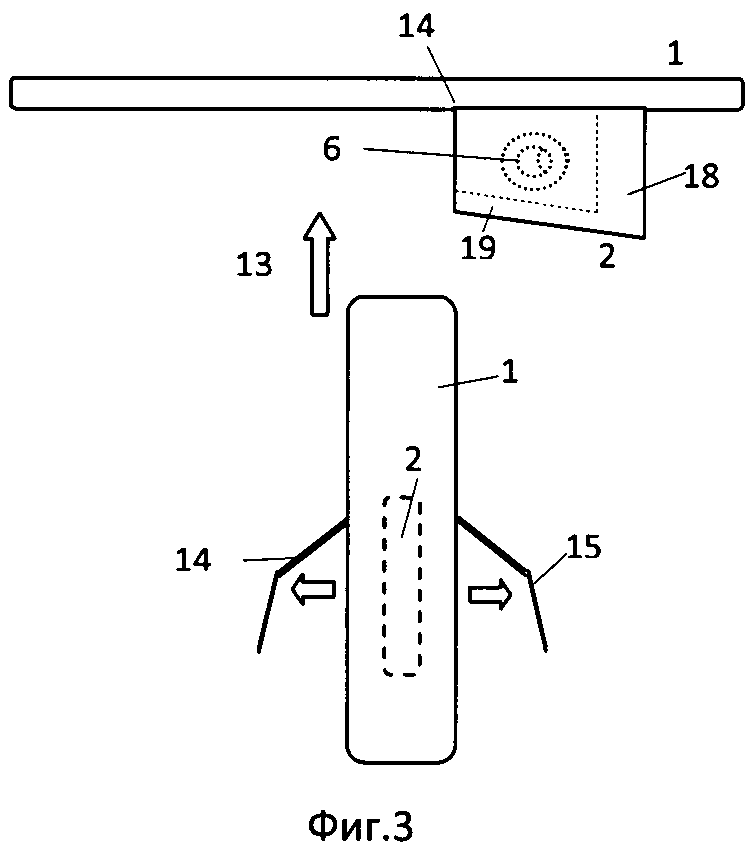
Фиг. 3 иллюстрирует выполнение заслонок, фиг. 4, 5, 6 - реализацию киля с лепестками или боковыми пластинами.
На фиг. 1, 2 обозначено:
1 - плавательное средство, например скимборд,
2 - корпус приспособления (собственно киль),
3 - крепежные элементы, при помощи которых корпус 2 крепится к плавательному средству 1,
4 - контроллер,
5 - источник питания, например аккумуляторная батарея,
6 - реверсивный движитель (здесь и далее подразумевается, что на валу или роторе движителя установлен винт, а в случае реверсивного движителя меняется направление и/или винты расположены с обеих сторон, либо движителем является водомет и т.п.),
7 - отверстие (полость) в корпусе 2 для установки движителя 6,
8 - полость для размещения источника питания 5,
9 - датчик наклона плавательного средства 1,
10 - пульт управления движителем или режимами контроллера,
11, 12 - движители, направленные под тупым углом к заданному направлению движения 13.
На фиг. 3-5 показано:
14, 15 - заслонки,
16, 17 - лепестки активного киля (корпуса 2),
18 и 19 - соответственно задняя и нижняя части корпуса (киля) 2,
20 - полость, расположенная на киле, в его корпусе 2 (фиг. 5) и выполненная с возможностью полного или частичного заполнения водой. В изображенном на фиг. 5 варианте лепестки 16, 17 располагаются в плоскости чертежа под произвольным углом.
На фиг. 6 позициями 21, 22 обозначены боковые пластины, выполненные, например, в виде крыльев, в или на которых установлены движители 11, 12.
Приспособление (активный киль) используют следующим образом.
С помощью элементов 3 (например, ремней) корпус 2 закрепляют на плавательном средстве 1. В варианте, показанном на фиг. 1, оператор с помощью пульта 10 управляет направлением вращения реверсивного поперечного движителя 6, так что создаваемый при этом момент обеспечивает устойчивость плавательного средства 1 (горизонтальное положение скимборда, например). Аналогичным образом в устройстве, показанном на фиг. 2, оператор меняет тягу движителей 11, 12, так что поперечное направлению 13 усилие обеспечивает устойчивость плавательного средства 1. Пульт 10 служит для ручного управления движителями 6 (11, 12) или изменения режима работы контроллера 4, назначением которого служит автоматическое поддержание горизонтального положения плавательного средства 1 или, что то же, вертикального положения корпуса киля 2. Следует подчеркнуть, что управление движителями 6 (11, 12) может осуществляться и с помощью джойстика или педалей, вмонтированных в корпус плавательного средства 1.
Таким образом, в рассмотренном случае оператор с помощью пульта 10, например, выполненного в виде джойстика, управляет направлением и/или тягой движителя 6 (движителей 11, 12).
В соответствии со следующим вариантом реализации, активный киль может быть выполнен с контроллером 4 и датчиком наклона 9, подключенным к информационному входу контроллера 4, выход которого соединен со входами управления движителем 6 или движителями 11, 12. При этом датчик наклона 9 фиксирует текущее значение крена плавательного средства 1 и/или его производные. Информация с выхода датчика наклона 9 обрабатывается контроллером 4 и последний формирует управляющий сигнал на движитель 6 (движители 11, 12).
Если используется один движитель 6, устройство может быть снабжено заслонками 14, 15, установленными с возможностью отведения струи, созданной движителями, в направлении, обратном заданному направлению движения плавательного средства. Это позволит сочетать поддержание устойчивого горизонтального положения плавательного средства 1 с его поступательным движением.
Выполнение задней и/или нижней частей 18, 19 киля 2 гибкими может быть удобным на мелководье, а при качке, когда движитель 6 или движители 11, 12 работают в "импульсном" режиме, позволяет дополнительно стабилизировать плавательное средство 1 и обеспечить дополнительный "поступательный" эффект движения не только при использовании заслонок 14, 15, но и за счет того, что задняя 18 и нижняя 19 части корпуса 2 работают как плавник.
При этом имеет место преобразование движения незначительного прогиба нижней части 19 в сторону, противоположную отбрасываемой струе и крену в поворотное движение заднего плавника (задней гибкой части 18 киля 2). Иными словами, киль может быть выполнен нежестким в нижней 19 и/или задней 18 части, в том числе с возможностью преобразования изгиба нижней части 19 относительно вертикальной оси в поворотное движение задней 18 части относительно горизонтальной оси для улучшения динамики движения плавательного средства 1 и имитации функции плавника.
Например, нижняя часть 19 киля 2 выше расположения движителей 6 (11, 12) делается с нежестким (упругим) креплением и возможностью отклонения от вертикальной оси киля 2 на угол ά (например, под действием сопротивления воды при включенном движителе 6). Задняя часть 18 также выполняется гибкой. В этом случае соединение этих двух частей тягой, например, закрепленной на шарнире на жесткой части киля 2, выше крепления нижней части 19 с движителем, а концами в крайних, средних или других точках нижней 19 и задней 18 частей соответственно, при отгибании нижней части 19 обеспечит поворот задней части 18, например, на угол К*arctg ά, где К - коэффициент пропорциональности, образованный отношениями плеч получившегося рычага относительно точки крепления шарнира. Разумеется, возможны и более сложные механические и электромеханические системы, в том числе с нелинейными коэффициентами преобразования угла. Другой возможностью реализации такого преобразования движения являются всевозможные ребра жесткости или градиенты параметров материала, заложенные в конструкцию киля 2 для контролируемого изменения форм при указанной деформации нижней части 19. Результатом, например, для доски с активным килем, является возможность движения по воде, во многом аналогичного таковому на роликовом скейтборде, когда изменение положения торса человека и перенос центра тяжести провоцируют движение, причем его параметры при этом во многом зависят от настроек электронного блока управления (контроллера 4). Отметим также, что наличие движителей стабилизации 6, 11, 12 не исключает дополнительных продольно расположенных по оси движения движителей, закрепленных на задней части киля или на корпусе плавсредства и предназначенных для осуществления его поступательного движения. Кроме того, в качестве киля может рассматриваться нижняя часть корпуса малоразмерного или индивидуального плавательного средства любой формы, оснащенная поперечными (6) или боковыми (11, 12) движителями, выполняющая по своему смыслу функцию активной стабилизации. Не исключается также наличие нескольких активных килей на плавсредстве, в том числе расположенных под некоторым углом к оси движения.
Для движения по мелководью используется также складной, разрезной киль (фиг. 4) или киль с лепестками 16, 17 (фиг. 5). При этом под каким бы углом (острым или прямым) ни были отведены в сторону и зафиксированы лепестки 16, 17 киля 2 с установленными на них движителями 11, 12, последние создают момент, удерживающий плавательное средство от крена. Происходит это за счет того, что лепестки 16, 17 разводятся так, что движители 11, 12, расположенные на фиксированном расстоянии от продольной оси плавательного средства 1, создают поток, весь или часть которого направлены от поверхности воды, вниз или вверх. При движении на глубине водоема складной киль, например, раздвижного типа наоборот может быть раздвинут и заглублен, чем достигается увеличение момента и дополнительное улучшение стабилизации.
Контроллер 4 может быть выполнен с возможностью изменения коэффициента передачи канала датчик наклона 9 - движитель 6 (11, 12). Данный канал представляет собой следящую систему, поддерживающую крен плавательного средства вблизи нуля или заданной величины отклонения, при этом от величины коэффициента передачи и временных параметров регулирования зависят как ощущения оператора, так и степень его участия в данном процессе, так что установка коэффициентов на том или ином уровне и выбор алгоритма (режима) позволяют расширить сферу применения активного киля, адаптируя его под разные задачи. Как следствие этого, расход аккумуляторов, например, целиком определяется, с одной стороны, такими настройками, а с другой - опытностью спортсмена, поскольку в отсутствие надобности дополнительной стабилизации движители 6, 11, 12 могут выключаться.
В более сложном случае контроллер 4 может учитывать погодные условия, волнение, и другие внешние данные, поступающие на его входы от соответствующих датчиков, в этом случае алгоритм и/или степень изменения коэффициента передачи канала датчик наклона 9 - движитель 6 (11, 12) и задержки регулирования могут рассчитываться с учетом внешних условий, гидродинамики плавательного средства 1 и выбранного оператором режима. В случае расположения движителей 11, 12 на боковых поверхностях киля, их согласованная работа может давать также некоторую компенсацию крена «на корму» и килевой качки. При этом во всех случаях положение центра тяжести оператора и динамика его перемещения может контролироваться датчиками (например, давления или перемещения), расположенными на поверхности плавательного средства, что позволяет использовать прогнозирование смещения общего центра тяжести и уменьшить время реакции при стабилизации.
Важным моментом также является возможность временного соединения нескольких плавательных средств (например, досок SUP с активным килем) посредством механических креплений (а также электрических соединений) в единое коллективное плавательное средство с режимом согласованной стабилизации. Помимо возможностей, например, «донорской» подзарядки недопустимо разряженных аккумуляторов одного из плавсредств от «коллег», а также совместного движения, такая конфигурация позволяет создать даже в условиях волнения экономичный вариант режима «коллективной» стабилизации с низкими энергозатратами, исключающий, в том числе, возникновение колебательности в такой системе, что также учитывается в режимах работы контроллера 4.
С увеличением скорости и снижением высоты волнения устойчивость плавательного средства с килем увеличивается, ввиду чего в таких условиях целесообразно вытеснять воду из полости 20 (например, сжатым воздухом от мини-компрессора или механическим поршнем, если форма полостей цилиндрическая, и т.п.). Благодаря этому плавучесть киля увеличивается, снижается осадка плавсредства и уменьшается сопротивление его движению. Это же обеспечивает возможность подстройки параметров киля под вес спортсмена, что, как и вся система стабилизации в целом, устраняет дискриминацию для массивных и крупногабаритных людей в случае узких серфов и досок (т.е. когда результирующий центр тяжести поднят слишком высоко и возникают трудности балансирования без активного режима).
Следует заметить, что при выключении режима стабилизации (например, аварийном) поведение плавательного средства с активным килем меняется слишком резко, что может быть опасно. Следствием может быть немедленное заполнение полостей 20 водой для увеличения устойчивости и соответствующая индикация (например, на пульте 10). Предлагается также использовать дополнительную систему безопасности в виде двух или более надувных мешков по бокам плавательного средства для сохранения необходимой поперечной устойчивости при исчерпании источников энергии движителей стабилизации 6, 11, 12 или в случае поломки последних. Предлагаемая система реагирует на поломку движителей или разряд аккумуляторов так, что использует последнюю энергию батарей для надувания указанных мешков воздухом, увеличивая площадь плавательного средства, его поперечную устойчивость и безопасность. Эта же система может быть полезна при начальном обучении.
Активный киль может быть снабжен также транспортной системой безопасности, препятствующей например, случайному включению без помещения в воду, а также при углах, близких к горизонтали (что может быть важно при транспортировке и как предосторожность при шалостях детей).
Ввиду того, что наличие активного киля резко улучшает устойчивость плавательного средства, возникает возможность для осуществления самой разной регулярной двигательной активности спортсменом, например: нажимание педалей дополнительного водомета, установленного на плавательном средстве, педального или иного устройства преобразования мускульной энергии в электрическую для подзарядки аккумуляторов или непосредственного движения плавательного средства, а также осуществления другой полезной деятельности без риска раскачивания или бокового переворачивания.
Реферат
Группа изобретений относится к судостроению, а именно к средствам передвижения, например доскам для серфинга, SUP. Активные приспособления для движения по воде содержат корпусы со встроенными движителями. В первом активном приспособлении корпус выполнен в виде киля, в полости которого расположен реверсивный, поперечный относительно заданного направления движения плавательного средства движитель. Во втором активном приспособлении корпус выполнен в виде киля, на котором установлены, по меньшей мере, два движителя. Движители направлены под прямым или тупым углом к заданному направлению движения плавательного средства. Достигается обеспечение устойчивости и функциональности плавательного средства в любых условиях. 2 н. и 16 з.п. ф-лы, 6 ил.
Комментарии