Устройство для погрузки на судно или выгрузки с него людей и/или грузов - RU2642001C2
Код документа: RU2642001C2
Чертежи






Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области судостроения и, в частности, к оборудованию для погрузки на судно или выгрузки с него людей и/или грузов; более конкретно, настоящее изобретение относится к устройству вышеупомянутого типа, которое устанавливается на борту судна.
Уровень техники на момент создания изобретения
Проблеме погрузки на плавучее транспортное средство или выгрузки с него грузов и/или персонала всегда придавалось большое значение, и она решалась самыми разными способами. Известны системы для перемещения людей и/или грузов, которые предназначены для применения главным образом в открытом море, в частности для обслуживания морских платформ, такие как, например, описанные в документах EP614432, W02004/108519, WO2010/034429 и WO2011/091854. Для этих систем обычно требуются технические средства, установленные как на суше, так и на борту, а также проведение очень сложных погрузочно-разгрузочных операций.
В других случаях сконструированные системы предназначены в основном для погрузки и выгрузки людей с ограниченной подвижностью, в частности вдоль их инвалидных колясок, такие как, например, описанные в документах JP2005161952, EP2130757 и W099/025301. Для этого типа подхода, который обычно предполагает перемещение платформы, предназначенной для доставки инвалидной коляски, в большинстве случаев требуется громоздкое оборудование, и он очень плохо подходит для смешанного применения, то есть предполагающего также транспортировку грузов.
И наконец, известны различные типы перемещаемых и/или убираемых сходней, такие как, например, описанные в документах W02006/120593 и W02009/125439. Однако эти устройства не пригодны для транспортировки изделий, и пользующиеся ими люди должны быть в состоянии передвигаться через конструкцию с малой площадью поверхности и очень ограниченной устойчивостью.
В связи с указанным выше целью настоящего изобретения является создание устройства для погрузки на судно и выгрузки с него физически здоровых людей и людей с ограниченными физическими возможностями, а также грузов, которое обладает повышенной устойчивостью, является простым в эксплуатации, универсальным [имеющим широкое применение] и характеризуется высокой степенью безопасности в эксплуатации.
Другой целью, которая должна достигаться с помощью указанного устройства, является исключение необходимости применения сходней или аналогичного оборудования, которое постоянно связывает между собой судно и соответствующую пристань или же жестко прилегает к ним.
Еще одной целью изобретения является создание устройства, которое простым способом устанавливается на борту судна, предпочтительно устройства относительно небольших габаритных размеров, если учитывать его эксплуатационные возможности.
Объект изобретения
Соответственно, объектом настоящего изобретения является устройство для погрузки на судно и выгрузки с него людей и/или грузов, содержащее платформу, соединенную с узлом перемещения, причем указанный узел перемещения установлен на опорном основании, которое соединено с указанным судном, при этом указанная платформа поддерживается в наклонном положении по существу параллельно ватерлинии указанного судна.
В одном варианте конструктивного исполнения указанное опорное основание соединено с указанным судном и расположено параллельно по отношению к плоскостям палуб указанного судна и предпочтительно выступает в виде консоли из транца указанного судна таким образом, что оно, по меньшей мере, частично убирается назад.
Кроме того, указанное устройство может быть выполнено с возможностью его размещения, когда оно находится в нерабочем состоянии, целиком внутри специального корпуса, который открывается к указанному транцу судна, причем корпус может быть открыт или закрыт.
Однако в соответствии с другим вариантом предлагаемое согласно настоящему изобретению устройство может быть установлено в другом месте судна, при необходимости оно может быть встроено в конструкцию одной из палуб, и оно может быть соответствующим образом профилировано и снабжено покрытием для придания эстетически приятно воспринимаемого внешнего вида.
Преимущественно указанная платформа соединена с указанным узлом перемещения с помощью шарнирных устройств, и в нем имеются средства, предназначенные для приведения в действие указанных шарнирных устройств и управления их поворотом. Имеются также датчики угла наклона, которые предназначены для выявления положения указанной платформы и поддержания ее по существу в горизонтальном положении.
В следующем варианте конструктивного исполнения указанный узел перемещения установлен на указанном опорном основании с возможностью поворота на 360° вокруг оси, которая перпендикулярна указанному основанию, причем узел перемещения снабжен предназначенным для этого приводным средством. Аналогичным образом, указанная платформа установлена на указанном узле перемещения с возможностью поворота вокруг оси, которая перпендикулярна указанной платформе. В частности, указанная платформа может быть установлена на подвижной каретке вдоль направления, параллельного плоскости указанной платформы, причем каретка, в свою очередь, соединена с возможностью поворота с указанным узлом перемещения.
В одном варианте конструктивного исполнения указанный узел перемещения содержит шарнирную руку, содержащую по меньшей мере два звена, которые могут поворачиваться относительно друг друга и относительно как указанного опорного основания, так и указанной платформы, причем имеется предназначенное для этого приводное средство. В частности, указанная шарнирная рука представляет собой роботизированную руку, содержащую по меньшей мере два шарнирных стержня и запястье, которое соединено с возможностью поворота вокруг оси со свободным концом одного из указанных звеньев, причем концевая часть указанного запястья жестко соединена или с подвижной кареткой, на которой установлена платформа, или с самой платформой, при отсутствии подвижной каретки.
В другом варианте конструктивного исполнения указанный узел перемещения содержит по меньшей мере одну конструкцию в виде шарнирного параллелограмма. В частности, указанная конструкция включает в себя по меньшей мере два стержня, расположенных параллельно друг другу и сочлененных с возможностью поворота с двумя коробчатыми корпусами, причем имеется приводное средство для поворота указанных стержней относительно оси, перпендикулярной их общей плоскости, при этом первый коробчатый корпус соединен с указанным опорным основанием и второй коробчатый корпус соединен с указанной платформой. Предпочтительно указанный узел содержит две пары стержней, которые расположены на параллельных плоскостях и соединены с возможностью поворота с двумя коробчатыми корпусами. В частности, указанные стержни представляют собой поршни, например, гидравлического типа.
Приводные средства и датчики преимущественно связаны с помощью интерфейса с центральным блоком управления, который обеспечивает возможность координирования работы устройства; центральный блок управления снабжен интерфейсом пользователя, который обеспечивает возможность осуществления ручного управления и программного управления. Кроме того, могут быть предусмотрены датчики, установленные на платформе, предназначенные для выявления относительно положения платформы по отношению к местоположениям, при которых платформа должна быть доступной, для улучшения регулировки ее положения; эти датчики связаны с помощью интерфейса с указанным центральным блоком управления.
Краткое описание чертежей
Конструкция устройства, предлагаемого согласно настоящему изобретению, и его работа понятны из следующего ниже подробного описания двух вариантов его конструктивного исполнения, приведенных в качестве примера, не ограничивающего изобретение, которое ведется со ссылкой на прилагаемые чертежи, на которых:
на фиг. 1 представлена вертикальная проекция, вид сбоку, первого варианта конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению, при его нерабочей конфигурации;
на фиг. 2 представлен вид, аналогичный виду, представленному на фиг. 2, но на нем вариант конструктивного исполнения устройства изображен при его рабочей конфигурации;
на фиг. 3 представлена вертикальная проекция, вид сбоку, второго варианта конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению, при его нерабочей конфигурации;
на фиг. 4 представлен вид в увеличенном масштабе части конструкции по фиг. 3 с частичным разрезом;
на фиг. 5 представлен вид сверху платформы устройства, предлагаемого согласно настоящему изобретению;
на фиг. 6 представлен частичный вид в разрезе в увеличенном масштабе платформы и относящейся к ней подвижной каретки, которые изображены на фиг. 3;
на фиг. 7 и 8 проиллюстрированы два основных рабочих этапа работы второго варианта конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению.
Описание некоторых вариантов осуществления изобретения
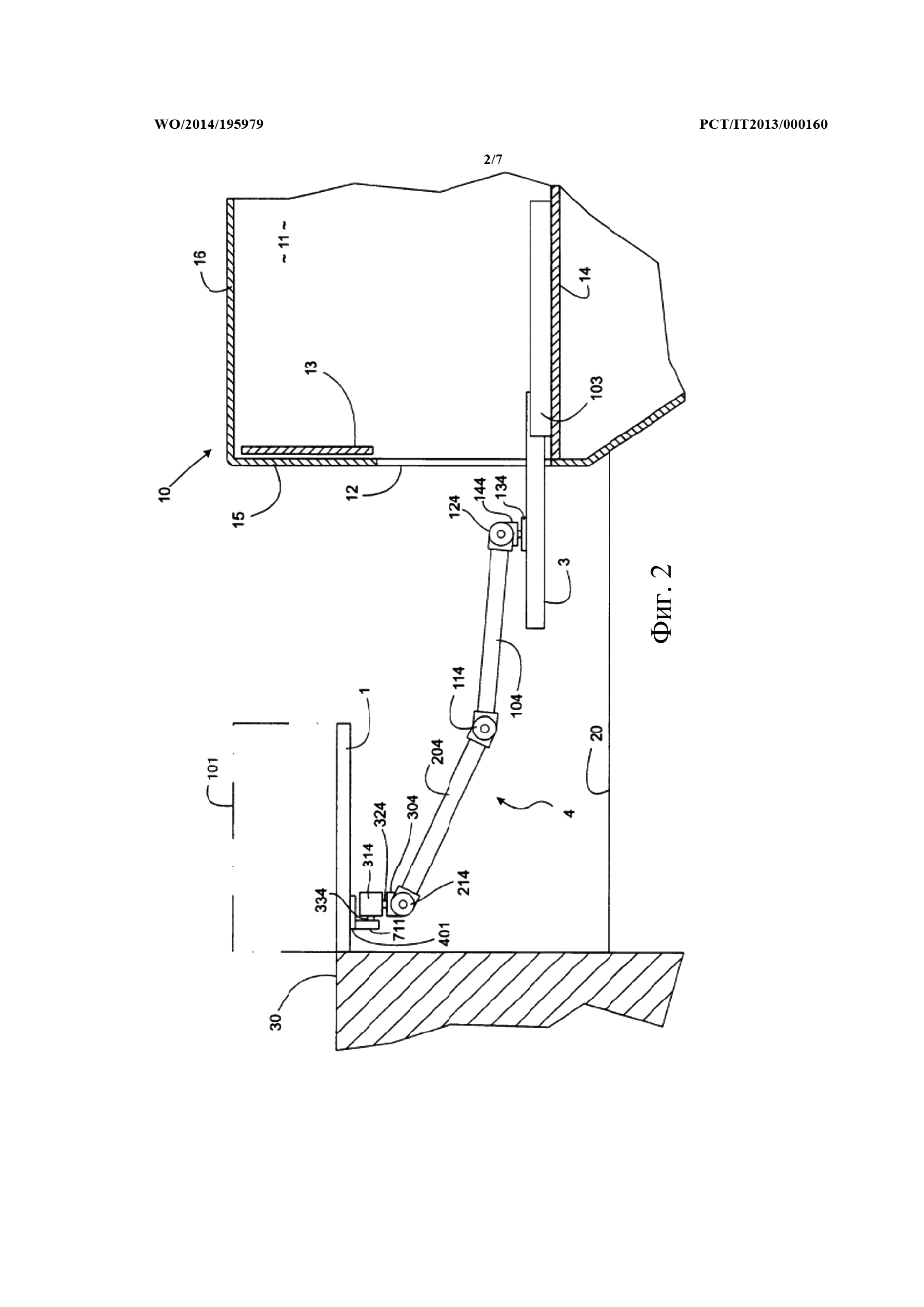
На фиг. 1 изображен первый вариант конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению. Устройство изображено при нерабочей конфигурации, и оно установлено внутри кормового отсека 11, расположенного под верхней палубой 16 и выполненного с отверстием 12, которое образовано в транце 15 и снабжено сдвижной дверцей 13. На палубе 14 отсека 11 расположена направляющая, приспособленная для размещения на ней с возможностью перемещения и скольжения опорного основания 3. В описываемом здесь варианте конструктивного исполнения узел перемещения представляет собой роботизированную руку 4, которая содержит два шарнирных звена 104 и 204; один конец звена 104 соединен с опорным основанием 3 посредством ножки 134 и колодки 144, прикрепленной к указанной ножке 134 с возможностью поворота. Конец звена 104, который соединен с колодкой 144, снабжен приводным средством 124.
Другой конец звена 104 снабжен приводным средством 114 и соединен со звеном 204, которое на противоположном конце соединено с помощью приводного средства 214 с запястьем 304, причем конец 314 запястья снабжен двумя вращающимися валами, которые перпендикулярны друг другу. В частности, вал 324 обеспечивает возможность поворота платформы 1 относительно роботизированной руки 4 вдоль оси, перпендикулярной средней ватерлинии, а вал 334, который соединен с кронштейном 711, жестко связанным с кареткой 401, как лучше видно в разрезе на фиг. 6, описанной ниже, и являющимся подвижным внутри платформы 1, обеспечивает возможность поворота указанной платформы в поперечном направлении относительно судна вдоль оси, параллельной средней ватерлинии.
Платформа 1 может быть снабжена подвижным заплечиком 101, в данном случае показанным в убранном назад состоянии штрихпунктирными линиями.
На фиг. 2 изображено такое же устройство, как и на фиг. 1, но при рабочей конфигурации, при которой платформа 1 смещена в положение сопряжения с пристанью 30.
На фиг. 3 изображен второй вариант конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению. На этой фигуре детали, аналогичные деталям, изображенным на предыдущих страницах, обозначены аналогичными позициями.
Как и в описанном выше предыдущем варианте конструктивного исполнения, на палубе 14 внутри отсека 11 расположена направляющая 103, приспособленная для размещения на ней с возможностью перемещения и скольжения опорного основания 3. В описываемом здесь варианте конструктивного исполнения на указанном опорном основании 3 расположена ножка 502 узла 2 перемещения устройства, предлагаемого согласно настоящему изобретению, причем эта ножка также имеет возможность скольжения, что лучше видно из фиг. 4, описанной ниже; указанная ножка содержит приводное средство, которое обеспечивает возможность поворота указанного узла перемещения относительно оси, перпендикулярной плоскости указанного опорного основания. Этот узел перемещения содержит первый коробчатый корпус 302, поворачивающийся относительно оси, перпендикулярной плоскости опорного основания 3, соединенный с двумя парами гидравлических поршней, например гидравлических поршней 102 и 202, из которых на этой фигуре можно видеть только один для каждой пары, причем указанные пары поршней соединены одним концом с указанным первым коробчатым корпусом 302 и противоположным концом – со вторым коробчатым корпусом 402. Колодка 702 узла 2 перемещения соединена с возможностью поворота с указанным вторым коробчатым корпусом 402 и соединена с платформой 1 так, как описано ниже. Опорное основание 3, как видно, выступает из транца 15 в виде консоли намного выше ватерлинии 20 и обращено по направлению к пристани 30.
На фиг. 4 показана с частичным разрезом в увеличенном масштабе часть конструкции по фиг.3. Как можно видеть из этой фигуры, пары поршней 102, 202 соответственно соединены друг с другом посредством соответствующих валов 122, 222, которые неподвижно соединены с крепежными деталями 112, 212, расположенными на концах указанных поршней 102, 202. К каждому из указанных валов 122, 222 закреплена шпонкой звездочка 132, 232, взаимодействующая со звездочкой 322 двигателя 312; валы 122, 222 и двигатель 312 размещены внутри коробчатого корпуса 302.
Коробчатый корпус 302 установлен на валу 512, размещенном в двигателе 502, который представляет собой ножку узла 2 перемещения. Такой двигатель 502 установлен на каретке 603, которая подвижно установлена внутри опорного основания 3 с помощью колес 613, скользящих вдоль профилированных пазов 703 основания 3, и с помощью двигателя 303, звездочка 313 которого взаимодействует с зубчатой рейкой 503, установленной на боковой задней кромке указанного опорного основания 3.
На противоположной боковой кромке основания 3 имеется зубчатая рейка 403, взаимодействующая со звездочкой 123 двигателя 113, который, в свою очередь, размещен на боковой стороне направляющей 103; указанная направляющая расположена на палубе 14 судна 10. Взаимодействие зубчатой рейки 403 с двигателем 113 обеспечивает возможность перемещения опорного основания 3, которое снабжено колесами 203, взаимодействующими с профилированными пазами 133 направляющей 103.
На фиг. 5 представлен вид сверху платформы 1 устройства, предлагаемого согласно настоящему изобретению. Указанная платформа 1 снабжена смещаемыми заплечиками 101, которые изображены на этой фигуре штрихпунктирными линиями; на платформе 1 установлены датчики 201 близости, которые обеспечивают возможность выявления положения платформы и ее корректировки при необходимости, и измерители 301 и 30T угла наклона, предназначенные для текущего контроля изменений угла наклона платформы относительно горизонтальной плоскости, то есть плоскости, параллельной плоскости палуб судна 10.
На фиг. 6 показан частичный вид конструкции по фиг. 3 в увеличенном масштабе с частичным разрезом. Головная часть 602 узла 2 передвижения прикреплена к каретке 401, которая имеет возможность перемещения относительно платформы вследствие взаимодействия зубчатой рейки 501, расположенной на задней кромке платформы 1, со звездочкой 421 двигателя 411, расположенного на указанной каретке 401; колеса 431, скользящие вдоль пазов 601, образованных во внутренней стенке платформы, обеспечивают возможность направления этого перемещения требуемым образом. Головная часть 602 соединена с возможностью поворота относительно оси, параллельной продольной оси платформы, с колодкой 802, которая снабжена приводным средством 822. Щитки 812, выступающие из колодки 802, соединены с возможностью поворота относительно оси, параллельной поперечной оси платформы, с валом 712 двигателя 722, размещенного в колодке 702, которая, в свою очередь, установлена на валу 612 двигателя 412, расположенного внутри коробчатого корпуса 402, с которым соединены концы поршней 102, 202.
На фиг. 7 и 8 показаны два следующих друг за другом этапа работы первого варианта конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению, причем на этих фигурах детали, аналогичные деталям, указанным на фиг. 3, обозначены такими же цифровыми позициями.
Работа устройства, предлагаемого согласно настоящему изобретению, на примере первого варианта его конструктивного исполнения, проиллюстрированного на фиг. 1 и 2 и описанного выше, станет понятна из приведенного ниже описания. В данном случае устройство в исходном состоянии размещено внутри отсека 11, образованного в корме судна 10, и опорное основание первоначально должно быть выдвинуто настолько, чтобы оно выступало в виде консоли из отверстия 12 в транце 15 аналогично тому, как описано ниже для варианта конструктивного исполнения, проиллюстрированного на фиг. 3-8.
В это время роботизированная рука 4 может быть развернута и перемещена в положение, проиллюстрированное на фиг. 2, путем приведения в действие приводных средств 124, 114 и 214.
При этом платформа размещена на такой же высоте, как и пристань 30; угол ее наклона относительно ватерлинии судна регулируется путем управления работой как приводного средства 214, так и вала 334, который жестко соединен с кронштейном 711, причем кронштейн составляет единое целое с кареткой 401, расположенной внутри платформы 1 в ее основании. Центральный блок управления, исходя из данных, непрерывно выявляемых измерителями 301, 301' угла наклона, предназначенными для измерения угла наклона платформы, будет передавать соответствующую команду таким образом, чтобы путем управления запястьем 304 поддерживалась по существу неизменной угловая ориентация платформы.
Затем платформа перемещается в положение сопряжения, например, с верхней палубой или любым другим местом в судне, которое может быть доступно путем перемещения роботизированной руки 4.
Работа устройства, предлагаемого согласно настоящему изобретению, на примере второго варианта его конструктивного исполнения, проиллюстрированного на фиг. 3-8 и описанного выше, станет понятна из описания, приведенного ниже.
На фиг. 3, когда устройство приведено в действие, основание 3 выдвинуто из своего корпуса внутри отсека 11, образованного в корме судна 10 и, для этого дверца 13 транца 15 открыта для того, чтобы основание 3 могло выступать в виде консоли относительно самого транца, как в первом варианте конструктивного исполнения. Сразу после того, как под действием двигателя 113 переместилось основание 3, также происходит перемещение каретки 603 под действием двигателя 303, что обеспечивает возможность перемещения ножки 502 вдоль самого основания 3 (см. фиг. 4).
На фиг. 7 поршни 102, 202 повернуты относительно оси, перпендикулярной их плоскости, и оттянуты с помощью двигателя 312 (см. фиг. 4) таким образом, что платформа 1 находится на такой же высоте, как и верхняя палуба 16. В этом состоянии смещаемые заплечики 101 платформы должным образом подняты для обеспечения надлежащей защиты. Во время перехода из исходного положения, изображенного на фиг. 3, в положение, изображенное на фиг. 7, платформа поддерживается в наклонном положении по существу параллельно ватерлинии судна под действием двигателей 822 и 722, как показано на фиг. 6 и описано выше. Когда платформа 1 размещена та такой же высоте, как и верхняя палуба, на платформу 1 могут быть погружены подлежащие выгрузке на берег пассажиры и/или грузы.
На следующем этапе, как показано на фиг. 8, платформа 1 смещена в положение сопряжения с пристанью 30; поршни 102, 202 выдвинуты вверх таким образом, чтобы платформа 1 доходила до пристани 30 и была расположена вровень с ней. Для этой цели опять-таки осуществляется текущий контроль угла наклона платформы 1 измерителями 301, 301' угла наклона и его изменение под действием двигателей 722, 822.
Разумеется, все входящие в состав предлагаемого устройства приводные средства, то есть двигатель 113, который управляет перемещением опорного основания 3, двигатель 303 каретки 603, на которой установлена ножка 502, двигатель ножки 502, которая обеспечивает возможность поворота ножки относительно вертикальной оси узла 2 перемещения, двигатель 412, который обеспечивает возможность поворота платформы 1, двигатель, который перемещает каретку 401, на которой установлена головная часть 602 узла перемещения, и двигатели 722, 822, которые регулируют угол наклона платформы, а также поршни 102, 202 преимущественно соединены с центральным блоком управления, который обеспечивает возможность управления работой согласно заранее заданным программам, то есть в зависимости от положения органов управления, управление которыми осуществляется вручную с помощью предназначенного для этого интерфейса пользователя.
В двух вариантах конструктивного исполнения, описание которых здесь приведено и которые проиллюстрированы на прилагаемых чертежах, показана пристань 30, к которой указанное судно 10 обращено своим транцем 15. Однако крайне высокая маневренность при передвижении как узла (4;2) перемещения, так и платформы 1, обеспечивает возможность приближения к пристани даже тогда, когда судно размещено вдоль одного из краев. Кроме того, устройство, предлагаемое согласно настоящему изобретению, целесообразно применять не только для погрузки с берега и выгрузки на берег, но и также для доставки на другие суда, как например, на борт или на платформу судна для погружения в воду, или для перемещения предметов или отдельных людей между разными палубами судна.
Подход, состоящий в применении роботизированной руки 4 в качестве узла перемещения для перемещения платформы, имеет несколько преимуществ, как с точки зрения простоты изготовления, так и с точки зрения универсальности применения и приспособляемости к разным видам суден.
Преимущественно звенья 104, 204 роботизированной руки 4 могут иметь изменяемую длину, как например поршни 102, 202, изображенные на фиг. 1, 5 и 6, относящиеся к описанному выше варианту конструктивного исполнения.
Двигатели, применяющиеся в обоих вариантах конструктивного исполнения устройства, предлагаемого согласно настоящему изобретению, могут представлять собой серводвигатели, электрические двигатели, пневматические двигатели, гидравлические двигатели или другие аналогичные приводы.
Центральный блок управления, не показанный на фигуре, может быть расположен также в месте, удаленном от устройства, предлагаемого согласно настоящему изобретению, и может также иметься панель управления на борту самой платформы, то есть может иметься или пульт дистанционного управления или приложение для дистанционного управления, работающее на портативных аппаратах, таких как смартфоны или аналогичные им аппараты. Центральный блок управления, к тому же, связан с помощью интерфейса с измерителями 301, 301' наклона для выявления угла наклона платформы 1 и передачи соответствующей команды коррекции наклона к запястью 304 и/или двигателям 722, 822 для обеспечения размещения платформы параллельно ватерлинии судна.
Аналогичным образом, датчики 201 близости, установленные в четырех углах платформы 1, соединены с указанным блоком управления для обеспечения возможности размещения платформы 1 соответствующим образом относительно или пристани 30 или верхней палубы 16 судна 10 или, при необходимости, других местоположений.
Следовательно, устройство, предлагаемое согласно настоящему изобретению, представляет собой техническое решение, которое является высоконадежным, универсальным, компактным в нерабочем состоянии и, к тому же, выполненным с высокой степенью безопасности.
Реферат
Изобретение относится к области судостроения, и в частности к устройству для погрузки или выгрузки с него людей и/или грузов, которое устанавливают на борту судна. Устройство для погрузки на судно или выгрузки с него людей и/или грузов содержит подвижную платформу, которая выполнена с возможностью перевозки людей и/или грузов и соединенную с узлом перемещения. Узел перемещения установлен на опорном основании, которое соединено с указанным судном. Платформа поддерживается в наклонном положении по существу параллельно ватерлинии указанного судна с помощью подходящих для этого средств. Узел перемещения является полностью убираемым из рабочего развернутого положения в нерабочее убранное положение. Достигается повышенная устойчивость, безопасность и простота с универсальностью в эксплуатации устройства. 18 з.п. ф-лы, 8 ил.
Комментарии