Способы спуска и подъема для погружных транспортных средств и других полезных грузов - RU2623293C2
Код документа: RU2623293C2
Чертежи

Описание
Настоящее изобретение относится к доставке полезных грузов к подводным местоположений и подъему полезных грузов от них, включая морское дно и среднеглубинные местоположения. Настоящее изобретение находит особое применение в системах спуска и подъема (LARS) для погружных транспортных средств, используемых при глубинных инженерных работах, таких как автономные подводные транспортные средства (AUV).
Пример LARS для AUV описан в более ранней патентной заявке, принадлежащей заявителю настоящей заявки, опубликованной как GB 2453645. Согласно данному документу AUV развертывается на погружной станции, которая также может быть описана как док или гараж для AUV. Станция с прикрепленным к ней AUV подвешена на тросе подъемного средства за бортом вспомогательного судна и быстро спускается в воду. В этом отношении предпочтительно минимизировать время, потраченное на прохождение турбулентной зоны заплескивания волны около водной поверхности. Хотя рывковые нагрузки могут быть вызваны слабиной в подъемном канате при прохождении установкой AUV/станции зоны заплескивания волны в условиях сильной качки.
После прохождения зоны заплескивания волны установка AUV/станции снижается к установленному местоположению на морском дне, в котором AUV впоследствии отцепит от станции для выполнения своей миссии. Приземление станции на морском дне может быть рассчитано по времени для минимизирования влияний вертикальной качки вспомогательного судна, однако динамические нагрузки, переданные при приземлении подъемному канату и установке AUV/станции, по-прежнему могут быть значительными. Поэтому, может возникнуть необходимость применения амортизаторов на нижней стороне станции.
После приземления подъемный канат ослабляется для отсоединения станции от движения вспомогательного судна, но для такого отсоединения необходимо, чтобы плавучее устройство удерживало подъемный канат над станцией для минимизирования риска возникновения препятствия между подъемным канатом и станцией.
В конце миссии или в промежутках своей миссии AUV, как правило, будет возвращаться на станцию для подъема, хранения или подзарядки. До того времени станция может быть поднята на вспомогательное судно для последующей передислокации в другое место или в том же самом местоположении, или она может быть отсоединена от вспомогательного судна и оставлена в первоначальном месте приземления на морском дне с последующим поднятием.
Отсоединение станции, как правило, с использованием ROV или акустического механизма расцепления, освобождает вспомогательное судно для выполнения других задач, тогда как AUV выполняет свою миссию. Однако для повторного присоединения необходимо ROV и оно представляет собой непростую задачу по определению местоположения станции и осуществлению повторного присоединения зачастую в неблагоприятных условиях в море.
В конечном счете, при необходимости подъема станции с морского дна, которое обычно представляет собой мягкий ил, в который станция будет стремиться вкопаться, может возникнуть необходимость преодоления сил прилипания или присасывания станции с морским дном. Такое преодоление может повысить опасность рывковых нагрузок в подъемном канате при отрыве станции от морского дна.
В более давнем документе предшествующего уровня техники, GB 2004818, показано, что буровая шахта на вспомогательном судне может быть замкнута и оснащена плавучим понтоном для опускания влияния волн при спуске погружного транспортного средства. Однако такое решение требует дорогостоящей адаптации судна. При отсутствии буровой шахты на судне проблема движения волны не может быть решена с использованием решения, раскрытого в документе GB 2004818.
В документе WO 01/21476 раскрыты устройства и способы подъема среднеглубинного AUV, в котором оборудованное движителем управляемое захватное транспортное средство привязывается к подводной системе управления привязыванием, которая, в свою очередь, подвешена на надводном судне. Вертикальные колебания судна компенсируются слабиной в фале между захватным транспортным средством и погруженной системой управления привязыванием. Однако влияние вертикальной качки не исключаются: относительное движение между системой управления привязыванием и полезным грузом просто минимизируется путем ослабления или наматывания фала в соответствующий момент времени. Такая особенность может компенсировать вертикальную качку при соединении захватного транспортного средства со среднеглубинным AUV, но это не будет исключать влияния вертикальной качки при подъеме соединенного захвата и AUV к системе управления привязкой. Следовательно, вся система в WO 01/21476 не обеспечивает компенсации вертикальной качки для надводного судна.
В документе US 7854569 раскрыто оборудованное движителем управляемое захватное транспортное средство для захвата и подъема UAV. Этот патент, прежде всего, касается передачи данных между управляемым транспортным средством и UAV и не связан с управления натяжением в грузоподъемном канате.
В документе US 3779195 описано устройства и способы подъема погруженных объектов, таких как пораженные субмарины. В этом патенте не раскрыто оборудованное движителем транспортное средство, но вместо этого используется устройство, которое направляется к объекту путем подхвата и перемещения кабельного каната, развернутого с объекта. Также раскрыта лебедка постоянного натяжения, но она не выполнена с возможностью компенсации вертикальной качки надводного судна.
В документе ЕР 1125838 описано оборудованное движителем надводное транспортное средство для подъема подводного транспортного средства, однако оно функционирует только, когда подводное транспортное средство у поверхности.
Именно на этом фоне было разработано настоящее изобретение.
В одном значении настоящее изобретение может быть выражено как способ подъема полезного груза, такого как AUV или гараж AUV, с подводного местоположения, содержащий: направление захватного блока в воде к полезному грузу, причем захватный блок присоединен к грузоподъемному канату для переноса грузоподъемного каната к полезному грузу; прикрепление захватного блока к полезному грузу; и подъем полезного груза при помощи натяжения, прикладываемого к грузоподъемному канату через захватный блок; при этом грузоподъемный канат удерживается лебедкой с функцией компенсации вертикальной качки, расположенной на надводном судне. Рывковые нагрузки при отрыве полезного груза с морского дна могут быть минимизированы путем постепенного увеличения натяжения в грузоподъемном канате.
В предпочтительных вариантах реализации, которые будут представлены в приведенном ниже описании, направление захватного блока содержит перемещение захватного блока горизонтально по осям x и/или y для выравнивания захватного блока над полезным грузом перед его прикреплением. Захватный блок может быть перемещен по оси Z к полезному грузу путем выпуска грузоподъемного каната с лебедки в течение движения захватного блока по осям x и/или y. В этом отношении, захватный блок может быть удобно спущен с надводного судна на грузоподъемном канате и подвешен под водой с грузоподъемного каната с отрицательной плавучестью.
Использование лебедки с функцией компенсации вертикальной качки обеспечивает возможность управляемого и точного направления захватного блока к полезному грузу и его стыковки с полезным грузом, без неожиданных изменений в положении оси z захватного блока. При определении лебедкой расположения оси z таким образом, что захватный блок находится на туго натянутом грузоподъемном канате, это может быть сопоставлено со схемами типа ослабленного фала в предшествующем уровне техники, которые движутся по оси z.
Подводные положения захватного блока и полезного груза могут быть определены известными способами, и затем захватный блок может быть направлен при одновременном отслеживании его изменяющегося положения для сближения с положением полезного груза.
Компенсация вертикальной качки посредством лебедки предпочтительно активируется при расположении захватного блока в положении глубины средних вод, близком, но вертикально разнесенном от полезного груза.
По обнаружении прикрепления захватного блока к полезному грузу лебедка предпочтительно прикладывает усилие натяжения к грузоподъемному канату во избежание падения грузоподъемного каната на полезный груз. С этой целью, в части грузоподъемного каната, расположенной вблизи полезного груза, может быть определено местное натяжение для управления лебедкой. Например, датчик натяжения грузоподъемного каната может быть расположен рядом с захватным блоком или встроен в захватный блок.
Также захватный блок может быть использован для опускания полезного груза к подводному местоположению, из которого впоследствии полезный груз поднимается или возвращается. Так, способ подъема по настоящему изобретению может быть продолжен посредством опускания полезного груза к подводному местоположению, прикрепленного к захватному блоку, в свою очередь, прикрепленного к грузоподъемному канату; отсоединения захватного блока от полезного груза; и подъема захватного блока без полезного груза с использованием грузоподъемного каната. При опускании полезного груза через зону заплескивания волны около поверхности, способ предпочтительно содержит демпфирование движения грузоподъемного каната, например, с использованием блока с компенсирующими пружинами, удерживаемого надводным судном.
Концепция настоящего изобретения охватывает оборудованный движителем захватный блок, направляемый в воде к полезному грузу, расположенному в подводном местоположении, причем захватный блок имеет крепление для переноса грузоподъемного каната к полезному грузу и захватную конструкцию для прикрепления захватного блока к полезному грузу, и выполнен с возможностью передачи натяжения подъема от грузоподъемного каната к полезному грузу через крепление и захватную конструкцию для подъема полезного груза. Крепление соответственно расположено на одной стороне захватного блока, а захватная конструкция расположена на противоположной стороне захватного блока для передачи усилия натяжения от грузоподъемного каната через захватный блок к полезному грузу.
Концепция настоящего изобретения также находит выражение в системе для подъема полезного груза с подводного местоположения, содержащей: захватный блок по настоящему изобретению, прикрепленный к грузоподъемному канату; лебедку с функцией компенсации вертикальной качки для выпуска грузоподъемного каната для опускания захватного блока к полезному грузу; устройство обнаружения положения для обнаружения подводных положений захватного блока и полезного груза; и устройство управления, воздействующее на лебедку и захватный блок для направления захватного блока к полезному грузу. Устройство управления выполнено с возможностью управления по меньшей мере одним движителем захватного блока для перемещения захватного блока по осям x и/или y и управления лебедкой для опускания захватного блока по оси z путем выпуска грузоподъемного каната с лебедки.
Концепция настоящего изобретения также распространяется на надводное судно, выполняющее, или выполненное с возможностью выполнения, способ настоящего изобретения или имеющее систему настоящего изобретения.
Благодаря настоящему изобретению подводный полезный груз может быть спущен, легко расположен и поднят при различных состояниях моря, минимизируя при этом силы натяжения, испытываемые полезным грузом и установкой, которая поддерживает полезный груз. Вспомогательное судно требует минимальной модификации для преимущественного использования настоящего изобретения. Устройство настоящего изобретения недорогое по сравнению с изменениями архитектуры вспомогательного судна, такого как закрытая шахта, предложенная техническим решением в документе GB 2004818.
Некоторые решения, обеспеченные настоящим изобретением, могут использоваться независимо от управляемого захватного блока, хотя они вносят синергистическую пользу при совместном использовании:
демпфирование движения грузоподъемного каната уменьшает нагрузки при спуске, вызванные слабым канатом при опускании полезного груза через зону заплескивания волны;
компенсация вертикальной качки лебедкой обеспечивает возможность управляемого спуска полезного груза на морское дно или на другую подводную поверхность, и обеспечивает возможность стыковки и подъема полезного груза с плавным и точным движением;
поддержание натяжения лебедкой удерживает грузоподъемный канат в стороне от полезного груза, тогда как полезный груз находится на морском дне или другой подводной поверхности; и
после приземления постепенное увеличение натяжения в грузоподъемном канате обеспечивает возможность управляемого подъема полезного груза с морского дна или другой подводной поверхности и управление любыми дополнительными нагрузками, вызванными полезным грузом, залипающим в илистом морском дне.
В документах WO 01/21476 и US 7854569, представленных в приведенном выше описании, пакеты, которые должны быть подняты, находятся в средних слоях воды. В противоположность этому, предпочтенные применения настоящего изобретения относятся к доставке и подъему пакета к морскому дну. В этом контексте, использование лебедок с функцией компенсации вертикальной качки, систем демпфирования нагрузок и/или постоянного натяжения гарантирует безопасное развертывание и подъем через зону заплескивания волны, управляемое приземление пакета на морское дно и его отсоединение, и впоследствии повторное присоединение и подъем пакета с морского дна с возможностью управления, расцепляя любое прилипание или всасывание.
Для более полного понимания настоящего изобретения приведенное ниже описание изложено со ссылкой, выполненной только в качестве примера, на сопроводительные чертежи, на которых:
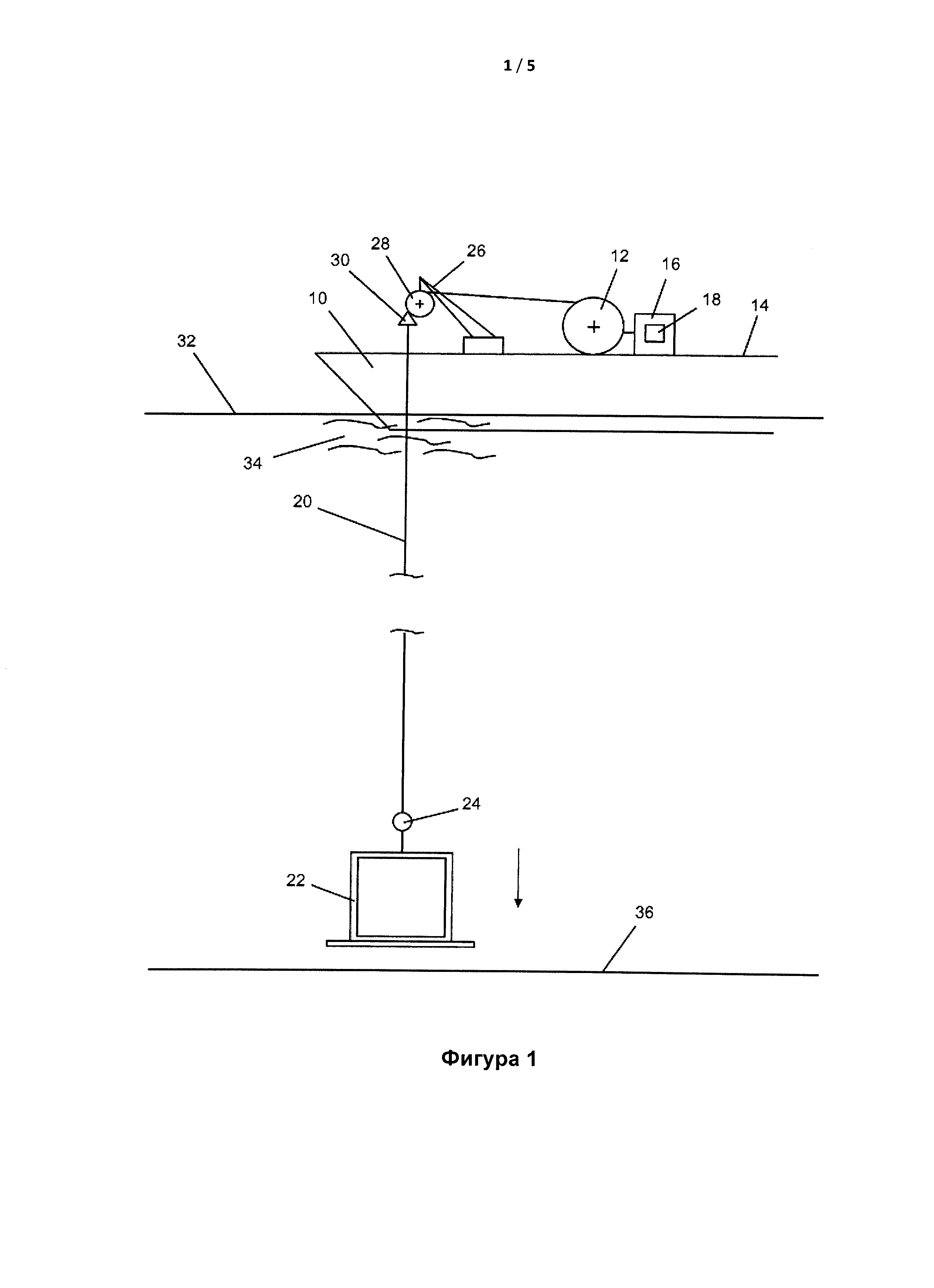
На фиг. 1 показан схематический вид сбоку первого варианта реализации настоящего изобретения в использовании, при опускании корзины AUV от вспомогательного судна к морскому дну;
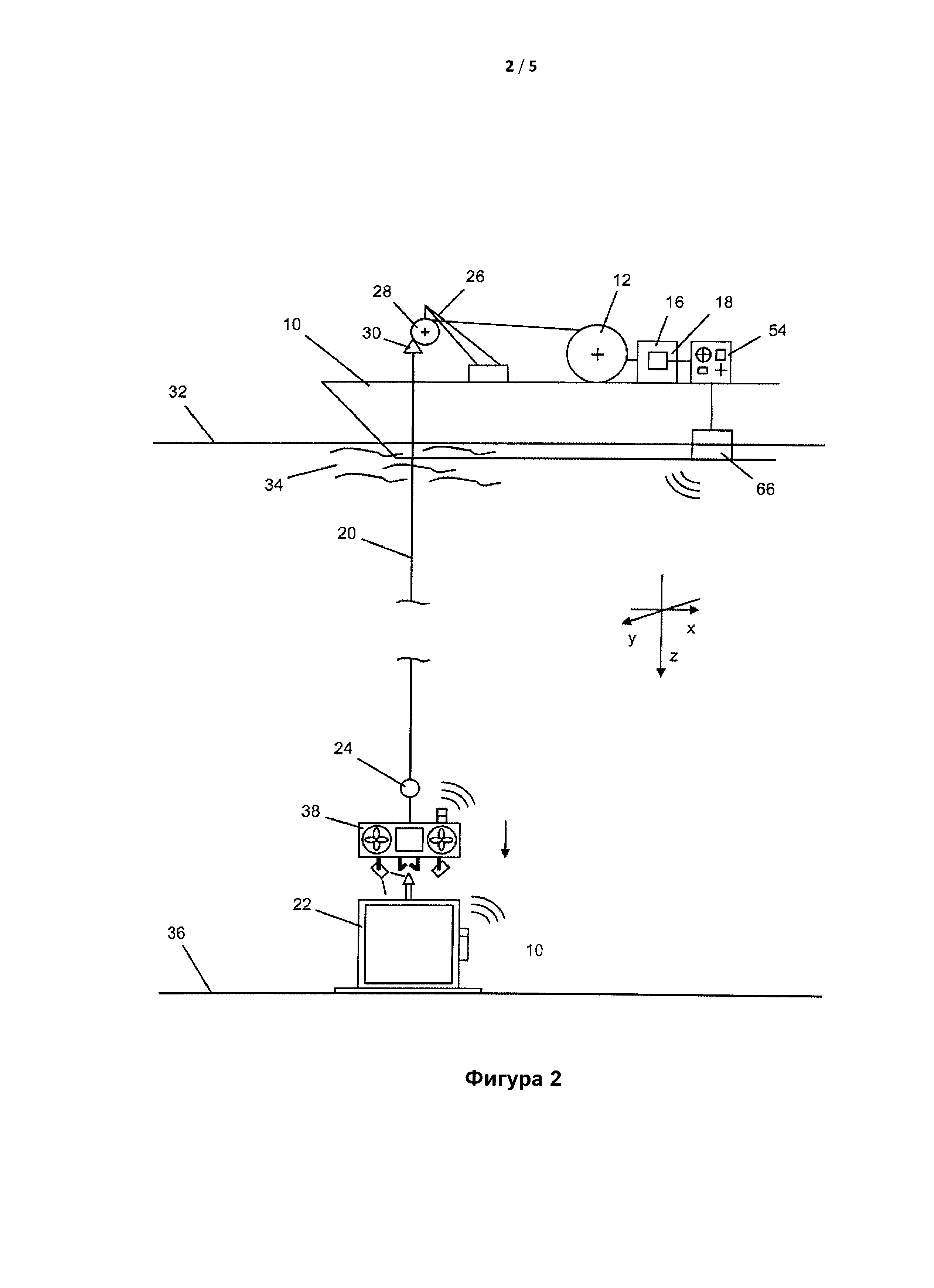
На фиг. 2 показан схематический вид сбоку второго варианта реализации настоящего изобретения в использовании, при спуске управляемого захватного блока от вспомогательного судна для стыковки с корзиной AUV, ранее размещенной на морском дне;
На фиг. 3 схематически показан увеличенный вид сбоку захватного блока и корзины AUV с фиг. 2 в момент их сцепления друг с другом, непосредственно перед приземлением корзины AUV на морское дно;
На фиг. 4 чертеж соответствует фиг. 3, но показывает расцепленный захватный блок и возвращающийся к вспомогательному судну после приземления корзины AUV на морское дно;
На фиг. 5 чертеж соответствует фиг. 4, но показывает захватный блок, возвращающийся и приближающийся к корзине AUV для подъема;
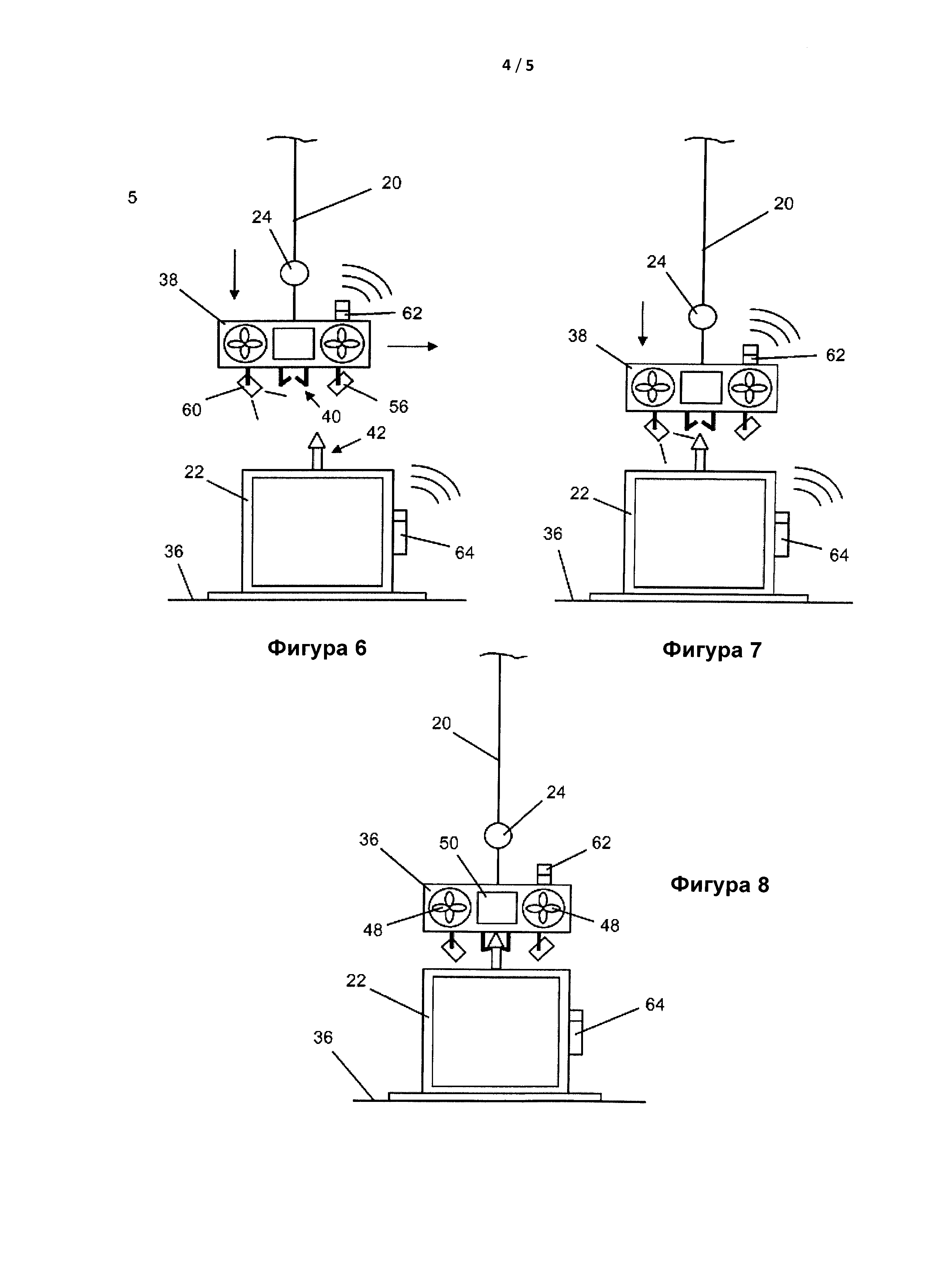
На фиг. 6 чертеж соответствует фиг. 5, но показывает захватный блок, подходящий ближе к корзине AUV вследствие перемещения по осям x, y при одновременном его опускании;
На фиг. 7 чертеж соответствует фиг. 6, но показывает захватный блок, выровненный с корзиной AUV после окончательного передвижения по осям x, y, и, следовательно, готовый для стыковки, - положение также показано на фиг. 2;
На фиг. 8 чертеж соответствует фиг. 7, но показывает, что захватный блок состыковался с корзиной AUV, которая, таким образом, теперь готов для подъема к вспомогательному судну; и
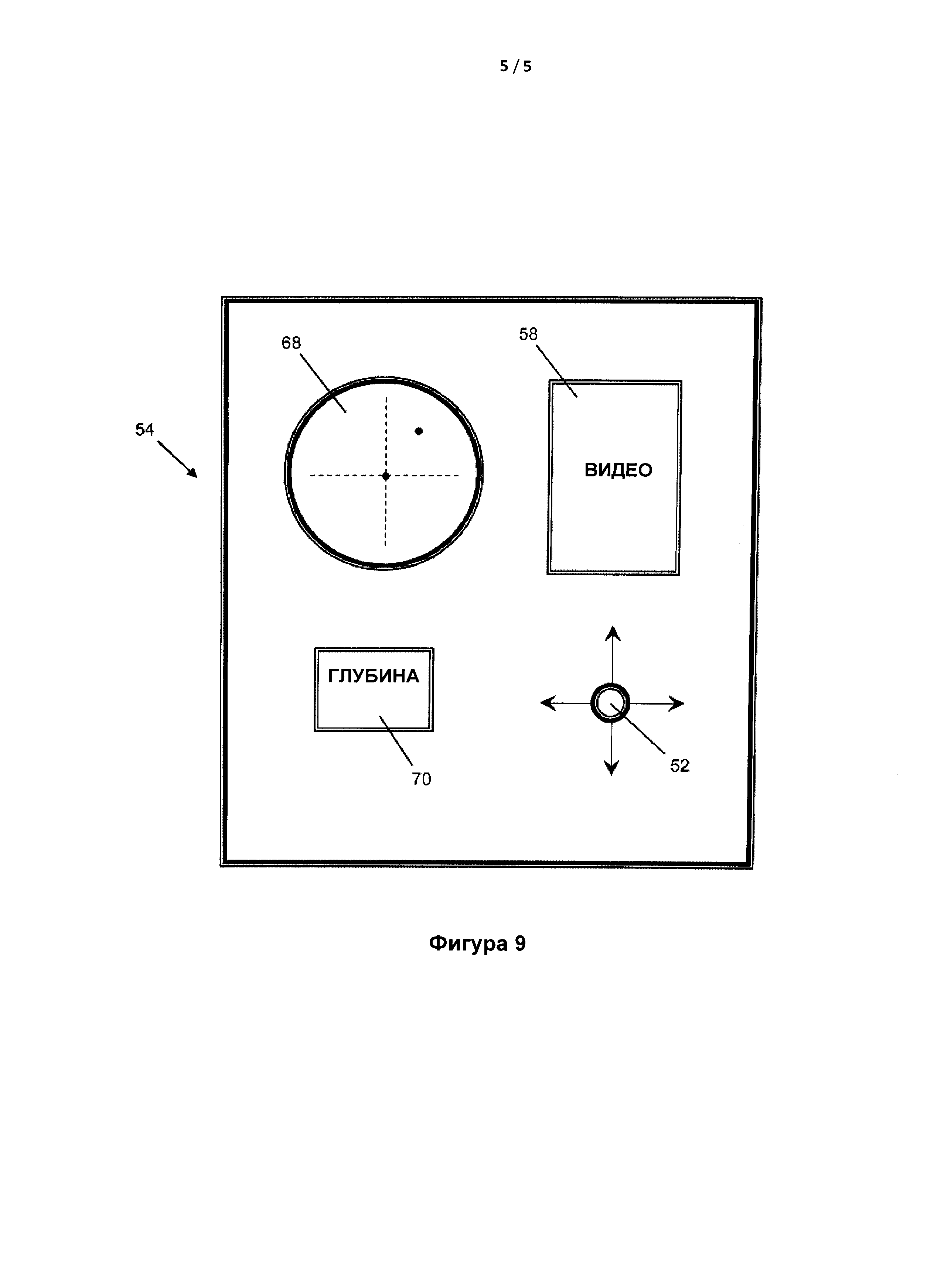
На фиг. 9 изображен схематический вид спереди блока управления, показывающего средства управления и отображения, которые могут быть представлены лоцману, управляющему движением захватного блока в использовании.
В приведенном ниже описании представлены два способа в соответствии с настоящим изобретением. Оба этих способа используют корзину или гараж AUV, доставляемую к морскому дну в качестве примера полезного груза, хотя настоящее изобретение может быть использовано с другими полезными грузами, которые необходимо доставлять к или поднимать с морского дна или других подводных местоположений, включая местоположения в средних слоях воды. В каждом случае подводное местоположение представляет собой полностью подводное или глубинное место так, чтобы полезный груз был полностью погружен с использованием грузоподъемного каната в том местоположении.
Согласно первому способу, описанному в отношении фиг. 1, полезный груз остается прикрепленным к грузоподъемному канату. В данном примере полезный груз представляет собой корзину AUV, которая может просто спускать и/или поднимать AUV (не показан) в течение недолгой остановки на морском дне. При этом, в данном примере корзина остается присоединенной к вспомогательному судну грузоподъемным канатом.
Второй способ, описанный согласно фиг. 2-9, представляет собой развитие первого способа. Он обеспечивает возможность оставления полезного груза на морском дне или отсоединение в другом подводном местоположении, включая места в средних слоях воды, для возврата или подъема позже. Такой способ подходит в тех случаях, когда полезный груз представляет собой корзину AUV со средствами гаража или дока, которые должны быть оставлены на морском дне и к которым AUV может периодически возвращаться для предотвращения поломки, дозаправки или подзарядки и, в конечном счете, для подъема.
Во-первых, согласно фиг. 1 чертежей вспомогательное судно 10 имеет лебедку 12 с активным компенсатором вертикальной качки, установленную на его палубе 14. Лебедка 12 приводится в действие силовым агрегатом 16, управляемым контроллером 18 лебедки. Лебедка 12 воздействует на грузоподъемный канат 20, который, как правило, содержит стальной провод, но могут быть использованы и другие материалы. Грузоподъемный канат 20 имеет силовой стержень и сердцевину связующих элементов в пределах его для выполнения функций гибкого подводного кабеля.
Грузоподъемный канат 20 удерживает полезный груз, в данном случае корзину 22 для AUV. Грузоподъемный канат 20 переносит контакт 24 нагрузки, расположенный около корзины 22, который воспринимает местное натяжение в грузоподъемном канате 20 для использования в управлении лебедкой 12, что подробно будет объяснено в приведенном ниже описании. Однако по сути корзина 22 соединена напрямую с грузоподъемным канатом 20 таким образом, что натяжение передается от грузоподъемного каната 20 к корзине 22 без использования промежуточного связующего элемента или другого провисающего каната.
Судно 10 имеет кран 26 для спуска-подъема, поддерживающий блок 28, по которому проходит грузоподъемный канат 20 от лебедки 12 к корзине 22. Блок 28 имеет встроенные демпфирующие пружинные компенсаторы для сдерживания рывковых нагрузок в пределах безопасной работы грузоподъемного каната 20. Фиксатор 30, связанный с блоком 28, воспринимает вес корзины 22 при ее подъеме над поверхностью 32.
При операции спуска кран 26 поднимает корзину 22 за бортом судна 10 при одновременном сохранении корзины 22 прикрепленной к блоку 28 фиксатором 30. Тяжесть корзины 22 затем переносится к лебедке 12 через грузоподъемный канат 20, после чего фиксатор 30 открывается, и корзина 22 спускается через зону 34 заплескивания волны по мере травления лебедкой 12 грузоподъемного каната 20. Рывковые нагрузки, вызванные слабиной в грузоподъемном канате 20, при прохождении корзиной 22 зоны 34 заплескивания волны в условиях сильного волнения, смягчаются демпфирующими пружинами в блоке 28.
Корзина 22 снижается до приближения ее к морскому дну 36, как правило, в пределах высоты двадцати метров. На данном этапе, в контроллере 18 лебедки включается режим активной компенсации вертикальной качки (АНС). В режиме АНС перемещение судна измеряется датчиком движения в контроллере 18 лебедки, и лебедка 12 приводится в действие силовым агрегатом 16 для нейтрализации такого движения, удерживая корзину 22 по существу на установленной высоте над морским дном 36 при качке судна 10.
При непрерывной компенсации движения вертикальной качки судна 10 в режиме АНС корзина 22 затем медленно снижается под ручным управлением или автоматическим регулированием к морскому дну 36. По приземлении корзины 22 на морском дне 36, контроллер 18 лебедки переключается вручную или автоматически в режим постоянного натяжения АНС. В этом режиме продолжается активная компенсация вертикальной качки, но контакт 24 нагрузки обеспечивает управляющий сигнал системе АНС контроллера 18 лебедки так, чтобы в грузоподъемном канате 20 поддерживалось предопределенное усилие. Такое усилие исключает падение грузоподъемного каната 20 на корзину 22.
Для подъема корзины 22 в контроллере 18 лебедки активируется функция отрыва от земли. Первоначально контроллер 18 лебедки управляет лебедкой 12 в режиме АНС. Функция отрыва от земли медленно увеличивает натяжение в грузоподъемном канате 20, замеряемое контактом 24 нагрузки до полного отрыва корзины 22 от морского дна 36. Такое медленное увеличение натяжения в грузоподъемном канате 20 гарантирует постепенное преодоление сопротивления перемещению корзины 22, вызванное прилипанием или присасыванием корзины 22 к морскому дну 36. Такая особенность снижает предел прочности при растяжении, который должен быть приложен к грузоподъемному канату 20 для отцепления корзины 22 от морского дна, и гарантирует, что прикладывается только достаточное натяжение для такого отрыва. Таким образом, при срыве корзины 22 рывковые усилия в грузоподъемном канате 20 снижаются.
По достижении корзиной 22 достаточной высоты над морским дном 36, в контроллере 18 лебедки может быть отключен режим АНС. Затем корзина 22 может быть поднята до поверхности 32 и назад в зацепление с фиксатором 30 блока 28 для подъема на палубу 14 судна 10.
Теперь согласно фиг. 2 к 9 система, показанная на этих чертежах, представляет собой развитие системы, показанной на фиг. 1; на которых одинаковые ссылочные номера используются для подобных деталей.
На фиг. 2-8 показан пилотируемый захватный блок 38 на конце грузоподъемного каната 20, который может быть зафиксирован и отцеплен от корзины 22. Это обеспечивает возможность оставления корзины 22 на морском дне 36 при отходе судна 10, и впоследствии подъема ее назад на судно (которое, конечно, не должно быть тем же самым судном), по мере необходимости.
Захватный блок 38 и корзина 22 имеют дополнительные зацепляющие части 40, 42, а именно, выступающую вниз охватывающую зацепляющую часть 40, расположенную на нижней стороне захватного блока 38, и охватываемую зацепляющую часть 42, выступающую вверх от верхней стороны корзины 22. Возможны и другие конструкции фиксатора в зависимости от требований проектного задания; например, охватывающая зацепляющая часть могла бы и не быть нисходящим проемом, а вместо этого могла бы быть перевернута.
Охватываемый зацепляющая часть 42 представляет собой стержень с увеличенной вверху конической головой 44, которая входит в зацепление с поворотными захватами 46 охватывающей зацепляющей части 40. Сцепленное состояние показано на фиг. 2 и 8. Захваты 46 поворачиваются для вмещения головки 44 стержня при зацеплении захватного блока 38 с корзиной 22, и поворачиваются снова для высвобождения головки 44 при необходимости отсоединения, как показано на фиг. 3.
Согласно приведенному выше описанию контакт 24 нагрузки располагается на грузоподъемном канате 20 для обеспечения возможности управления контроллером 18 лебедки местным натяжением в грузоподъемном канате 20 через лебедку 12. В данном примере контакт 24 нагрузки размещен выше захватного блока 38. Однако вместо этого контакт 24 нагрузки мог быть встроен в захватный блок 38. И снова корзина 22 присоединена к грузоподъемному канату 20 таким образом, чтобы натяжение передавалось от грузоподъемного каната 20 к корзине 22 без промежуточного связующего звена или другого провисающего каната, хотя в этом случае через захватный блок 38.
Захватный блок 38 содержит реверсивные реактивные микродвигатели 48, расположенные парами, действующими параллельно в основном горизонтальной оси, посредством которых захватный блок 38 может быть перемещен, управляем, ориентирован и пилотируемым под водой в горизонтальной плоскости, определенной и осями х и y. Несмотря на то, что на чертежах видна только одна пара реактивных двигателей 48, могло бы быть более одной пары двигателей 48. Например, четыре реактивных двигателя 48, расположенные в двух парах, действующих взаимно по ортогональным осям, обеспечили бы тягу в каждом направлении, без необходимости изменения направления движения захватного блока 38.
Хотя захватный блок 38 мог бы и иметь дополнительную способность применения вертикальной тяги для перемещения вверх и вниз в водяной толще, тем не менее, предусматривается, что вертикальное перемещение по оси Z захватного блока 38 может быть выполнено преимущественно или исключительно путем перемещения грузоподъемного каната 20 с использованием лебедки 12.
Захватный блок 38 имеет бортовой модуль 50 управления с датчиками направления движения, глубины и высоты. При обратной связи от этих датчиков модуля 50 управления перемещением захватного блока 38 управляет лоцман, манипулирующий ручкой 52 управления блока 54 управления на судне 10. Блок 54 управления схематично показан на фиг. 9. Захватный блок 38 соединен с блоком 54 управления гибким соединением передачи данных, встроенным в грузоподъемный канат 20.
Работа блока 54 управления связана с работой контроллера 18 лебедки для синхронизации их действий при необходимости, например, при управления лебедкой 12 для выполнения перемещения по оси Z захватного блока 38 при перемещении лоцманом ручки 52 управления блока 54 управления, соответственно.
Захватный блок 38 дополнительно содержит видеокамеру 56, расположенную на ее нижней стороне, которая передает видеосигнал блоку 54 управления для отображения лоцману на мониторе 58, размещенному на блоке 54 управления. Данное устройство отображения использовано для помощи конечной стыковки захватного блока 38 с корзиной 22 путем обеспечения лоцману возможности выровнять охватывающую зацепляющую часть 40 с головкой 44 стержня. Кроме того, для этой цели на нижней стороне захватного блока 38 расположено освещение 60.
Положение захватного блока 38, при его нахождении под водой, передается акустическим приемоответчиком/ретранслятором 62, переносимым захватным блоком 38. Корзина 22 также имеет приемопередатчик 64. Положения обоих приемопередатчиков 62, 64 соответственно определяются акустической системой позиционирования, такой как USBL (ультракороткая база) система 66, переносимая судном 10. Относительные положения приемопередатчиков 62, 64 удобно отображаются лоцману на навигационном дисплее 68 блока 54 управления. Навигационный дисплей 68 позволяет лоцману направлять захватный блок 38 к неподвижному приемопередатчику 64 корзины 22 по осям x, y, по мере опускания захватного блока 38 по оси Z лебедкой 12, травящей грузоподъемный канат 20. Кроме того, на блоке 54 управления обеспечен глубинный дисплей 70.
Таким образом, этот второй способ настоящего изобретения использует пилотируемый захватный блок 38 корзины, который может быть использован для оставления корзины 22 на морском дне 36. В действительности, захватный блок 38 представляет собой направляемый захват или крюк, приспособленные к концу грузоподъемного каната 20, который может быть продвинут по оси x, y при перемещении его по оси Z. Управление по оси x, y в течение опускания по оси Z эффективно направляет захватный блок 38 к корзине 22 в пределах нисходящего сужающегося конического объема.
Процесс спуска второго способа зеркально отражает процесс спуска первого способа до момента приземления корзины 22 на морское дно 36, за исключением того, что в данном случае корзина 22 изначально прикрепляется к фиксатору 30 блока 28, а затем через захватный блок 38. На фиг. 3 показана корзина 22, приближающаяся к морскому дну 36.
По приземлении на морском дне 36 зацепляющиеся части 40, 42 расцепляются для освобождения захватного блока 38 от корзины 22, и захватный блок 38 поднимается без корзины 22 согласно фиг. 4. При наличии достаточного зазора между захватным блоком 38 и корзиной 22, режим АНС может быть отключен, и захватный блок 38 может быть затем поднят к судну 10 путем намотки грузоподъемного каната 20 на лебедку 12.
При необходимости подъема корзины 22 в той последовательности, которая представлена на фиг. 5-8, судно 10 размещается над корзиной 22 с использованием известных способов, таких как акустическая система 66 позиционирования USBL, обнаруживающая приемопередатчик 64 на корзине 22. Захватный блок 38 снижается до положения, близкого к положению корзины 22, и в этом случае, как правило, в пределах двадцати метров вертикального разделения. Сравнение сделано между положениями приемопередатчиков 62, 64 на захватном блоке 38 и корзине 22, и их относительные положения по оси x, y отображаются лоцману на навигационном дисплее 68 блока 54 управления как показано на фиг. 9.
Затем, при включенном режиме АНС, активированным на лебедке 12 для компенсации движения вертикальной качки судна 10, лоцман использует ручку 52 управления и навигационный дисплей 68 блока 54 управления для перемещения захватного блока 38 по оси x, y. Точки, изображенные на навигационном дисплее 68, показанном на фиг. 9, представляют приемопередатчики 62, 64 на захватном блоке 38 и корзине 22, и изначальная задача лоцмана состоит в том, чтобы совместить эти точки. Кроме того, лоцман смотрит на глубинный дисплей 70 и монитор 58 около навигационного дисплея 68 и выжидает, когда корзина 22 станет видна под захватным блоком 38.
Захватный блок 38 приводится активно для закрытия любого зазора по соям x, y между приемопередатчиками 62, 64 на захватном блоке 38 и корзине 22, при одновременном опускании захватного блока 38 по оси Z путем размотки грузоподъемный канат 20 с лебедки 12. Таким образом, захватный блок 38 направляется к корзине 22 по мере его опускания. Грузоподъемный канат 20 затем может быть соединен с корзиной 22 через захватный блок 38 при использовании видеокамеры 56 и освещения 60 для выполнения направления конечного приближения захватного блока 38 к корзине 22.
После захвата корзины 22 захватным блоком 38, контроллер 18 лебедки переключается на режим постоянного натяжения АНС для поддержания натяжения в грузоподъемном канате 20. Такое натяжение предотвращает падение грузоподъемного каната 20 на корзину 22. Корзина 22 затем поднимается с морского дна 36 к судну 10 таким же образом как в первом способе, раскрытом в приведенном выше описании.
В пределах концепции настоящего изобретения возможно множество вариаций. Например, согласно приведенному выше описанию, настоящее изобретение может быть использовано для доставки полезного груза, или подъема полезного груза, к подводному местоположению, отличному от морского дна, такому как местоположение в средних слоях воды. Оно может быть полезно для развертывания или подъема подводного транспортного средства, такого как AUV, с любого места в водяной толще при оснащении транспортного средства соответствующим приемопередатчиком.
Кроме того, в принципе для захватного блока 38 было бы возможно определять относительное положение корзины 22 через приемопередатчик 64 или иным образом, и передавать такую информацию об относительном местонахождении назад блоку 54 управления.
Настоящее изобретение может быть использовано для развертывания различных общих комплексов, и подъема их, на морском дне или других подводных местоположениях. Например, настоящее изобретение может быть использовано для развертывания множества контейнеров, которые будут собраны на морском дне или на подводной структуре. Другим примером полезного груза, который может быть развернут и поднят настоящим изобретением, является дистанционно управляемое или самоуправляемое гусеничное транспортное средство, которое работает на морском дне.
Реферат
Изобретение относится к судостроению, а именно к доставке полезных грузов к подводным местоположениям и подъему полезных грузов от них. Надводное вспомогательное судно содержит систему для подъема и способ подъема полезного груза из подводного местоположения. Система для подъема полезного груза из подводного местоположения содержит грузоподъемный канат, захватный блок, который оборудован движителем, захватную конструкцию для прикрепления захватного блока к полезному грузу, захватную конструкцию для подъема полезного груза и лебедку с функцией компенсации вертикальных колебаний для выпуска грузоподъемного каната и для опускания захватного блока к полезному грузу. Для подъема полезного груза из подводного местоположения включают направление захватного блока в воде к полезному грузу, прикрепление захватного блока к полезному грузу и подъем полезного груза при помощи натяжения. Захватный блок прикреплен к грузоподъемному канату, который удерживается лебедкой с функцией компенсации вертикальной качки. Лебедка расположена на надводном судне для переноса грузоподъемного каната к полезному грузу. Достигается легкость расположения и поднятия груза при различных состояниях моря. 3 н. и 16 з.п. ф-лы, 9 ил.
Комментарии